大众汽车车载网络系统
- 格式:ppt
- 大小:1.81 MB
- 文档页数:10

汽车车载网络技术详解(修订版)习题库第一章车载网络系统基础知识 (1)第二章CAN总线传输系统 (4)第三章子总线系统 (7)第四章网关与诊断总线 (9)第五章光学总线系统 (10)第六章以太网与FlexRay总线 (13)第七章大众奥迪车系车载网络系统 (15)第八章丰田多路通信系统 (16)第九章通用车系车载网络系统 (18)第十章汽车车载网络系统检修 (19)第十一章车联网 (20)第一章车载网络系统基础知识一、填空题1.导线长度和插接器数量的增加不但占据车内的有效空间、增加装配和维修的难度、提高整车成本,而且妨碍整车可靠性的提高。
2.车载电控系统经历了中央电脑集中控制、多电脑分散控制和网络控制三个阶段。
3.数据传输总线,就是指在一条数据线上传递的信号可以被多个系统共享,从而最大限度地提高系统整体效率,充分利用有限的资源。
4.通过接口连接不同设备时有点对点连接和多点连接两种连接方式。
5.如果将传输路径的控制功能主要分配给其中一个设备,则该设备就变为主控控制单元,而其他设备仅具有副控功能,因而,具有副控功能的这些设备亦称从属控制单元。
6.协议三要素是指语法、语义和定时规则。
7.总线上的比特编码(比特表示)可以通过非归零法(NRZ)、曼彻斯特法和脉冲宽度调制法(PWM)实现。
8.车用网络大致可以分为4个系统:动力传动系统、车身系统、安全系统、信息系统。
二、选择题1.以下(A )不是车载网络系统组成。
A.传输媒体B.拓扑结构C.通信协议D.数据总线2.通过一个转发器将每台入网计算机接入网络,每台转发器与相邻两台转发器用物理链路相连,此为(A )。
A.环形网拓扑结构B.星形网拓扑结构C.总线形网拓扑结构D.三角形网拓扑结构3.以一台称之为中心处理机为主组成的网络,各种类型的入网机均与该中心处理机有物理链路直接相连,此为( B )。
A.环形网拓扑结构B.星形网拓扑结构C.总线形网拓扑结构D.三角形网拓扑结构4.将所有的入网计算机通过分接头接入一条载波传输线上,此为(C )。


大众汽车车载网络常见故障检修方法浅析当CAN总线出现故障或数据传输异常时,往往会出现多种奇怪的故障现象,如仪表板显示异常、车辆无法启动、启动后无法熄灭,、车辆动力性能下降、某些电控系统功能失等。
这是因为相关数据或信息是通过CAN总线传输的,如果传输失败,那么会产生多种连带故障,甚至造成整个网络系统瘫痪。
最为常见的故障现象是仪表显示异常。
在检修过程中,首先应查看具体的故障症状,根据故障症状和网络结构图来初步分析有可能是哪些原因造成的,然后使用相关的诊断仪器进行诊断。
CAN故障通常的原因有CAN线短路、对电源短路、对地短路、相互接反等。
1.CAN H与CAN L短路当CAN H与CAN L短路时,CAN网络会关闭,无法再进行通信。
会有相应的网络故障码。
CAN H与CAN L短路的总线波形当两者相互短路之后,实际测量两条CAN导线的电压,会发现始终在2.5V 左右,基本不变化。
故障排除方法:通过插拔CAN总线上的控制模块(节点),可以判断是由节点引起的短路还是导线连接引起的短路。
逐个断开节点,若电压恢复正常,则说明该节点有问题,若断开所有节点后电压还没有变化,则说明线路短路。
1.CAN H对电源正极短路当出现CAN H对电源短路这种故障时,根据CAN总线的容错特性,可能出现整个CAN网络无法通信的情况或产生相关故障码。
以对12V电源短路为例,此时CAN H电压电位被置于12V,CAN L线的隐性电压被置于大约12V。
CAN H对电源短路的总线波形 CAN H对地短路的总线波形实际测量电压,若CAN H电压为12V,CAN L电压被置于约11V,则说明出现此类故障。
故障原因:如果不是CAN H导线对外部电源短路引起的,那么这种故障就有可能是控制模块内部的CAN收发器损坏造成的。
1.CAN H对电源负极(接地)短路当出现CAN H对地短路这种故障时,根据CAN总线的容错特性,可能出现整个CAN网络无法通信的情况或产生相关故障码。

学科:汽车车载网络系统专业:汽车电子技术、汽车智能技术1.汽车电子控制系统主要由传感器、电子控制单元ECU、执行器三部分组成。
2. CAN总线系统的总体构成由节点、传输线、终端电阻三部分组成。
3. CAN控制器接收控制单元中微控制器的信号,处理数据之后在传给CAN收发器。
4. 舒适CAN总线在隐形状态下,既逻辑1信号时,CAN-H线和CAN-L线的信号电压分别为0V、5V5. 舒适CAN总线系统的传输速率为100Kb/s6. 汽车电子控制系统中,用于接收、分析、计算各种传感器所采集的信息的功能元件是电控单元7. 什么装置用于接收传感器信号,并对传感器输入的信号进行预处理,使输入信号变成微控制器可以处理的信号输入接口电路8. 由CPU、存储器、输入/输出端口和总线共同组成微控制器9. 中央处理器是微控制器的核心,它由寄存器、控制器和运算器组成10. 动力CAN总线中,CAN-H线和CAN-L线的信号电压之和为5V11. 舒适CAN总线在工作状态时,CAN-H线和CAN-L线的信号电压之和为5V12. 不属于舒适CAN总线常见故障的是高温13. 为了降低车辆不运行时的电能能耗,舒适CAN总线具有睡眠模式,那么睡眠模式下CAN-L线的电压为12V14. 舒适CAN总线的CAN-H线与CAN-L线之间没有终端电阻,没有彼此依赖关系,所以舒适总线具有单线运行15. 舒适CAN总线中,如果CAN-H线和CAN-L线短路,其故障波形是波形一致特点16. 迈腾轿车舒适CAN总线系统中具备用电负载管理的是车载网络控制单元17. 舒适CAN总线中CAN-H和CAN-L线交叉反接这种情况一般是维修失误造成的18. 为了确保CAN总线不被外界杂波干扰,两个维修点或维修点与总线接点之间的距离至少要大于10cm19. 为了防止检测时舒适CAN总线进入睡眠模式,通常要打开点火开关20. 根据传输速率来看舒适CAN总线系统属于低速CAN21. 汽车电控系统由汽车传感器、ECU和执行元件组成。
项目一汽车电脑的检修一、填空题1.汽车电脑(ECU)在硬件上由输入接口、______微控制器___和___输出接口三部分组成,其核心部件是___微控制器____。
2.微控制器由 CPU 、存储器和 I/O口三部分组成,其核心部件是__CPU__。
3.存储器按读写操作原理分为__只读存储器(ROM)___和___随机存储器(RAM)两类,其中故障码存储在随机存储器(RAM)中。
4.汽车电控单元常用的检修方法有直观检查法、接触检查法、故障再生法、参照检查法、替代检查法、电压检查法、电阻检查法、波形检查法和信号注入检查法等几种。
5.汽车电控单元的编码通过故障诊断仪来完成。
二、判断题1.汽车电控系统由汽车传感器、ECU和执行元件组成。
(√)2.临时数据存放在只读存储器ROM中。
(×)3.可以通过给汽车电控系统的RAM断电的方法来清除故障码。
(√)4.汽车上每个控制单元都有编码,并且每个控制单元只有一个编码。
(×)5.汽车电脑的匹配是给控制单元输入一个代码。
(×)6.汽车电脑的匹配是改变控制单元内部的某些参数。
(√)三、简答题1.汽车电控单元的硬件由哪几部分组成?各部分的作用是什么?答:(1)输入接口——接收传感器信号,并对传感器输入的信号进行预处理(放大、滤波、整形、变换等),使输入信号变成微控制器可以处理的信号(2)微控制器——接收、分析处理、存储输入接口输送的信息并进行计算,存储临时数据,并根据运算结果输出指令(3)输出接口——将微控制器输出的指令转变为控制信号,并将其放大,以驱动执行元件执行相应动作2.简述汽车电控单元的功用。
答:(1)接收传感器信号,并对传感器输入的信号进行预处理,使输入信号变成微控制器可以处理的信号(2)接收、分析处理、存储输入接口输送的信息并进行计算,存储信息(运行信息和故障信息),并根据运算结果输出控制指令(3)生成和放大控制信号,以驱动执行元件执行相应动作(4)为传感器提供参考电压(5)输出故障信息3.汽车电控单元常见的故障有哪些?答:电脑电源故障、输入/输出部分故障、存储器部分故障、特殊故障项目二动力CAN总线系统的检修一、填空题1.CAN总线的英文全称是 Controller Area Network 。

大众汽车车载网络系统简介大众汽车车载网络系统是指安装在大众汽车上的一套网络系统,用于提供车辆信息、娱乐、导航和通信等功能。
车载网络系统的发展已经成为汽车行业的一个重要趋势,为驾驶员和乘客提供了更多便利和舒适的体验。
功能特点车辆信息大众汽车车载网络系统能够通过传感器和控制器收集车辆的各种信息,例如车速、油耗、里程等。
这些数据可以通过车载网络系统的显示屏展示给驾驶员,帮助其更好地了解车辆的状态。
车载网络系统为车内乘客提供了丰富的娱乐功能。
乘客可以通过系统连接到互联网,观看在线视频、听取音乐、玩游戏等。
此外,系统还支持蓝牙连接,乘客可以通过蓝牙连接手机,播放自己的音乐和视频。
导航系统大众汽车车载网络系统配备了先进的导航功能。
驾驶员可以通过系统输入目的地信息,系统会根据实时交通情况提供最佳的路线规划。
导航系统还支持语音导航,驾驶员可以通过语音与系统进行交互。
通信功能车载网络系统支持蓝牙电话功能,驾驶员可以通过系统与手机进行蓝牙连接,实现免提通话。
乘客还可以通过系统发送和接收短信,使用手机上的通讯应用进行通信。
大众汽车车载网络系统采用了现代化的技术架构,以满足复杂的车辆信息处理和通信需求。
硬件车载网络系统的硬件主要包括中央处理器单元(CPU)、显示屏、触摸屏、声音处理器、传感器等。
中央处理器单元负责处理各种信息和指令,显示屏用于展示图像和文字信息,触摸屏用于用户输入和操作,声音处理器用于音频输出,传感器用于收集车辆信息。
软件车载网络系统的软件主要包括操作系统、应用程序和驱动程序。
操作系统负责管理硬件和应用程序的资源,提供系统级别的服务和功能。
应用程序包括娱乐、导航、通信等功能模块,驱动程序用于与硬件设备的交互。
车载网络系统通过无线网络实现与互联网的连接。
它可以通过内置的无线模块连接到Wi-Fi网络,也可以通过蜂窝网络(如4G)实现移动数据连接。
网络连接为车载网络系统提供了丰富的在线资源,例如在线地图、音乐和视频流媒体。

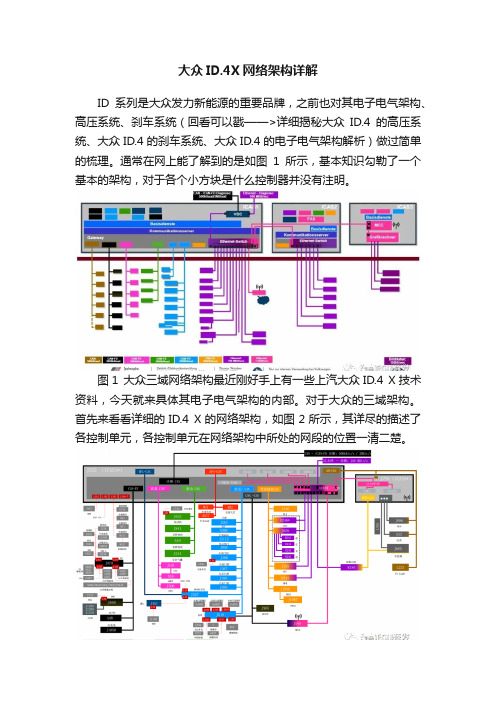
大众ID.4X网络架构详解ID系列是大众发力新能源的重要品牌,之前也对其电子电气架构、高压系统、刹车系统(回看可以戳——>详细揭秘大众ID.4的高压系统、大众ID.4的刹车系统、大众ID.4的电子电气架构解析)做过简单的梳理。
通常在网上能了解到的是如图1所示,基本知识勾勒了一个基本的架构,对于各个小方块是什么控制器并没有注明。
图1 大众三域网络架构最近刚好手上有一些上汽大众ID.4 X技术资料,今天就来具体其电子电气架构的内部。
对于大众的三域架构。
首先来看看详细的ID.4 X的网络架构,如图2所示,其详尽的描述了各控制单元,各控制单元在网络架构中所处的网段的位置一清二楚。
图2 详细的ID.4的网络架构其网络架构中共使用了13个子网络:1.CAN-FD EV :主要连接DC/DC、BMC、AC充电机等,速率为2M/s;2.蓄电池CAN:用于连接电池管理单元BMC与从板CMC,速率为500k/s;3.MFL-CAN:用于ICAS1与电动转向之间的连接,速率为500k/s;4.底盘CAN-FD:用于ICSA1与ESC、刹车系统eBKV、EPS连接,速率为2M/s;5.驱动CAN-FD:用于连接ICSA1与驱动单元、安全气囊,速率为2M/s,好奇为什么安全气囊会放在驱动CAN里;6.AFS-CAN:用于连接ICAS1与大灯和E-sound,速率为500k/s;7.舒适CAN:用于连接ICAS1与座椅、天窗、车门等控制单元,速率为500k/s;8.驾驶员辅助CAN-FD:用于连接ICAS1与ACC、PLA、RVC、MFK等,速率为2M/s;9.100M以太网:用于ICAS1与ACC、PLA、RVC、MFK之间以及外部诊断之间的连接,速率为100M/s;10.1G以太网:用于ICAS1与ICAS3,以及ICAS1与OCU4之间的连接,速率为1G/s;11.Con.-CAN:用于ICAS1与KESSY之前的连接。