元胞自动机交通流模型.共35页文档
- 格式:ppt
- 大小:4.21 MB
- 文档页数:35
交通流元胞自动机模型的解析与应用研究元胞自动机是近年来兴起的用于交通流建模的重要工具,本文围绕一维交通流元胞自动机模型,从理论和应用两个方面展开研究。
相对于应用研究,元胞自动机交通流模型的理论研究比较匮乏,这是本文研究的重点,完成了以下工作:(1)元胞自动机模型“基于规则,自底向上”的特点,导致解析研究非常困难。
本文进行了开放边界NS模型的解析研究,根据模型的微观规则解释了宏观现象产生的机理,首次证明了在标准边界条件下,该模型几个重要的宏观统计量,包括入境流量、道路通行能力、全局密度、畅通/阻塞状态下的密度剖面等都存在精确的解析结果。
对扩展左边界条件,本文提出了一种更简洁的入境流量解析化方法,同时给出了密度剖面的解析结果。
(2)元胞自动机模型与车辆跟驰模型之间的区别和联系是理论研究中屡屡被提到的问题。
本文选取最优速度模型与VDR模型进行了比较研究。
首先通过对模型规则的分析,证明了确定NS模型是OV模型的一种离散形式。
随后针对两模型更复杂的具体形式,使用数值仿真的手段,从基本图和交通流演化两方面进行了对比研究。
应用方面,本文包括以下两方面的研究:(1)对于任何一个动态系统,动态特性和稳态特性有着同样重要的意义。
本文使用VDR模型构建了一条仿真道路,将入境流量视为系统的输入、道路上车辆的全局密度作为输出,用数值仿真的方法研究了在输入信号变化时系统输出的动态和稳态过程,发现在自由流状态下,系统的响应十分迅速,稳态过程非常平稳。
而在阻塞状态下,系统响应迟缓,而且出现了超调和周期震动等现象。
对交通系统动态特性的考察,是以往研究中少见到的。
(2)国内道路上最常见的交通形式是机非混行,现有的机非混合模型往往将机动车和非机动车采用同样的处理方式。
本文采用两种不同的元胞自动机模型来分别描述机动车和自行车的行为,根据实测结果,用摩擦干扰和阻滞干扰体现自行车对机动车的干扰作用,建立了自行车干扰下机动车交通流模型并利用数值模拟研究了其行为。
双向航道船舶交通流元胞自动机模型及仿真
双向航道船舶交通是指船舶在一个双向航道中相互交错行驶的交通模式。
在双向航道中,船舶需要遵守严格的通航规则,以保证交通顺畅和安全。
为了研究双向航道船舶交通
流的行为和性质,可以采用元胞自动机模型进行仿真。
元胞自动机是一种离散动力学系统模型,它通过将空间划分成小的元胞,并规定每个
元胞的状态和规则来模拟系统的演化过程。
在双向航道船舶交通流的元胞自动机模型中,
每个元胞代表一个船舶,并具有状态、位置、速度等属性。
模型中的规则包括通航规则和
动力学规则。
通航规则描述了船舶在双向航道中的行驶规则,例如限速、交叉时互相避让等。
通过
定义船舶的状态和位置,可以根据通航规则决定船舶的行驶方向和速度。
如果两艘船舶在
交叉口相遇,根据通航规则,先来先行,可以决定哪个船舶可以继续前进。
动力学规则描述了船舶的运动方式和速度变化规律。
船舶的运动受到水流、风力、操
纵力等影响,可以根据这些因素来确定船舶的加速度和速度变化。
通过模拟船舶的运动,
可以研究船舶交通流的行为和性质。
通过元胞自动机模型进行双向航道船舶交通流的仿真,可以得到交通流的密度、流量、速度等统计数据,并进行可视化展示。
这些数据可以用于评估航道的通行能力和安全性,
优化航线规划和交通管制措施,提高航道交通的效率和安全性。
双向航道船舶交通流元胞自动机模型及仿真是一种研究航道交通流行为和性质的有效
方法,可以为航道管理和交通控制提供科学依据和决策参考。
分路段交通状态模式元胞传递模型随着城市化进程的不断加快,城市交通问题日益凸显。
交通拥堵、交通事故等问题频频出现,给城市发展带来了巨大的挑战。
为了解决这些问题,交通研究领域不断探索新的方法和技术。
其中,基于元胞自动机的交通模拟技术成为了研究热点之一。
本文将介绍一种基于元胞自动机的交通模拟模型——分路段交通状态模式元胞传递模型,并探讨其在城市交通管理中的应用。
一、元胞自动机模型元胞自动机(Cellular Automata,CA)是一种由几何结构、状态集合、状态转移规则和边界条件等组成的离散动力学模型。
它的基本思想是将空间划分为若干个小区域,每个小区域称为“元胞”,每个元胞具有一定的状态,状态之间通过某种规则进行转移,模拟系统的动态演化过程。
元胞自动机模型在交通领域的应用主要是基于其离散化、并行化和动态演化等特点,可以模拟交通流的运动和变化。
由于交通流具有高度的非线性和随机性,因此需要采用一些特殊的元胞自动机模型来模拟交通流的运动和变化。
二、分路段交通状态模式元胞传递模型分路段交通状态模式元胞传递模型(Cellular Automata Model for Traffic State Pattern in Segments,CATSPS)是一种基于元胞自动机的交通模拟模型。
它将道路划分为若干个小区域,每个小区域称为“路段”,每个路段具有一定的状态,状态之间通过某种规则进行转移,模拟交通流的运动和变化。
CATSPS模型的基本思想是将交通流分为若干个状态,每个状态具有一定的速度和密度,通过某种规则进行转移。
模型中的状态分为三类:自由流状态、拥堵状态和停车状态。
自由流状态表示交通流畅通,速度较快;拥堵状态表示交通流受到一定程度的阻碍,速度较慢;停车状态表示交通流完全停止。
CATSPS模型的状态转移规则主要考虑了路段之间的影响和交通流的动态演化。
具体地,模型中每个路段的状态转移规则如下:1. 自由流状态转移规则当路段i处于自由流状态时,其速度可以通过以下公式计算: v[i] = vmax * (1 - (n[i] / nmax) ^ β)其中,v[i]表示路段i的速度,vmax表示路段i的最大速度,n[i]表示路段i的车辆密度,nmax表示路段i的最大车辆密度,β表示路段i的拥堵程度。
基于元胞自动机的城市交通流模拟近年来,随着城市化的不断加速,城市交通问题也越来越凸显。
如何有效地进行城市交通规划,优化城市交通流,已成为当今社会关注的焦点。
因此,城市交通流模拟技术也逐渐成为城市交通规划的重要工具之一。
其中,基于元胞自动机的城市交通流模拟技术因其简单易懂、高效精确而备受关注。
元胞自动机(Cellular Automata,CA)是一种用于模拟分布式系统的数学工具,通过确定一些简单的规则,模拟出复杂的系统行为。
在城市交通领域,元胞自动机模拟技术将整个道路网络划分为若干个元胞,每个元胞可以视为一个交叉口或者一段道路,同时每个元胞具有一定的交通流容量。
当车辆到达某个元胞时,将根据其判断是否通过该元胞并选择进入哪一个邻近元胞。
在每个时刻,都会根据预定的交通规则,更新每个元胞的状态,从而模拟整个道路网络的交通流动。
基于元胞自动机的城市交通流模拟技术的核心是交通流规则的制定。
一般来说,交通流规则考虑的因素包括交通工具的行驶速度、车辆之间的距离、道路容量等。
常用的交通流模型包括《随机速度模型》、《宏观流模型》、《传统元胞模型》等等。
这些模型对于不同类型的城市交通问题具有不同的适用性。
在实际应用中,基于元胞自动机的城市交通流模拟技术可以发挥出其大量的优势。
首先,该模拟技术可以在较短时间内模拟出大规模的交通网络,并预测出某个时间段内的交通流量和通行速度等数据。
其次,该技术能够模拟出不同时间段下的交通拥堵情况,以此来指导交通管理人员采取相应的措施,保证道路畅通。
最后,基于元胞自动机的城市交通流模拟技术具有较好的可视化效果,可以直观地展示出城市道路网络的交通状况,为决策者做出更准确的决策提供帮助。
尽管基于元胞自动机的城市交通流模拟技术在理论和应用方面都取得了很大的进展和成果,但该技术也存在一些问题和挑战。
首先,该技术对于交通流量、速度等参数的精确测量和调节要求较高,相应的数据收集也需要花费较高的成本和时间。
双向航道船舶交通流元胞自动机模型及仿真一、引言船舶交通流是指海洋、河流或湖泊上的船只在航道上的流动情况。
双向航道船舶交通流是指在一条航道上,同时存在着两个方向的船舶交通流动。
双向航道船舶交通流的模拟和仿真对于船舶交通管理、航道设计和交通安全具有重要意义。
为了研究双向航道船舶交通流的动态变化和规律,本文将基于元胞自动机的思想,设计双向航道船舶交通流元胞自动机模型,并进行仿真实验,以探讨双向航道船舶交通流的特性和规律。
二、双向航道船舶交通流元胞自动机模型的设计1. 元胞自动机的基本原理元胞自动机是一种通过在离散的时间和空间中对元胞状态进行更新的动力学模型。
在元胞自动机中,每个元胞可以有多个可能的状态,并根据相邻元胞的状态和一定的转移规则来更新自身的状态。
元胞自动机模型由环境、元胞、邻域和状态转移规则组成。
2. 元胞自动机模型在船舶交通流中的应用在船舶交通流中,船舶的航行状态可以看作是元胞的状态,航道可以看作是环境,船舶之间的相互影响可以看作是邻域,船舶的行驶规则可以看作是状态转移规则。
基于此,可以将元胞自动机应用于船舶交通流的模拟和仿真。
3. 双向航道船舶交通流元胞自动机模型的设计针对双向航道船舶交通流,设计双向航道船舶交通流元胞自动机模型。
考虑航道的特性和船舶的动力学特性,将航道划分为多个元胞,每个元胞代表一段航道的长度。
将船舶划分为多个元胞,每个元胞代表船舶的长度。
设定船舶之间的安全距离,建立船舶之间相互影响的邻域关系。
根据船舶的转向、速度和位置等信息,设计船舶的状态转移规则。
4. 双向航道船舶交通流元胞自动机模型的参数在设计双向航道船舶交通流元胞自动机模型时,需要考虑航道的宽度、长度、弯曲程度,船舶的尺寸、速度、转向性能等参数。
还需要考虑风力、水流、能见度等外部环境因素对船舶交通流的影响。
2. 模型的初始化在进行仿真前,需要对模型进行初始化。
初始化船舶的位置、速度、转向等状态,初始化航道的状态。
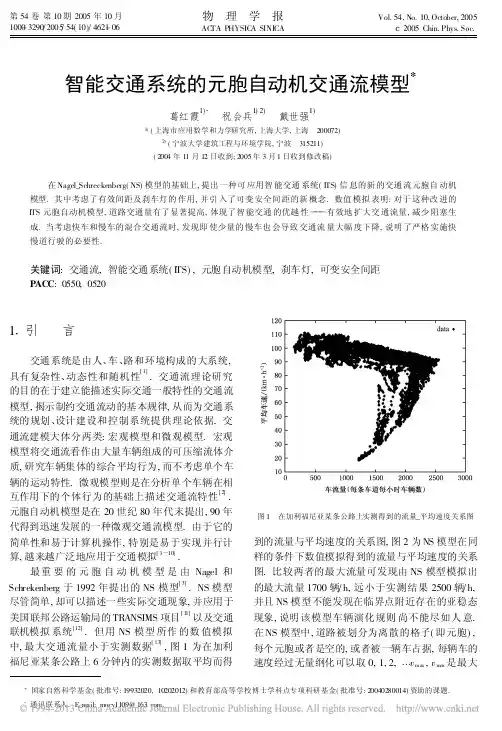
考虑行车状态的一维元胞自动机交通流模型花 伟 林柏梁(北京交通大学交通运输智能技术和系统教育部重点实验室,北京 100044)(2004年6月28日收到;2004年10月19日收到修改稿) 在Nagel Schrekenberg单车道元胞自动机交通流模型(简称NS模型)的基础上,考虑车辆之间的相对运动薛郁等提出了一种改进的单车道元胞自动机交通流模型(简称改进的NS模型).通过两种情况列出了改进的NS模型存在不尽周严的地方,随之在新模型中引入了行车状态变量和反馈规则,从而控制车辆出现倒车和刹车过急等现象.通过计算机对新模型进行模拟,发现减速概率和车流密度对车流状态的演化影响很大,当减速概率高(如道路条件差)时,即使车流密度低,车流也会出现局部堵塞状态;而当减速概率一定时,随着车流密度增加,车流的运动相与堵塞相发生了全局性的交替出现,此时类似于波的波峰和波谷的传播.与改进的NS模型相比较,新模型模拟的车流量较高,说明新模型减少了车流的总体停滞状态.关键词:交通流,元胞自动机,行车状态,反馈规则PACC:055011引言对交通流特性的研究一直都是交通领域及有关专家学者重点研究的问题,它涉及到路网规划、流量分配,以及道路能力设计与控制、红绿灯绿信控制等众多交通问题.近年来越来越多的学者利用元胞自动机模型及理论对交通流特性进行研究和模拟,并取得了一系列的研究成果[1—6].元胞自动机模型从计算机创始人、著名数学家Neumann在60年代提出构想[7],到W olfram设计的第184号规则元胞自动机交通流模型[8],再作为第184号规则的推广,又先后提出了FI元胞自动机交通流模型[9]和NS元胞自动机交通流模型[10]以及二维的BM L[11]元胞自动机交通流模型.虽然元胞自动机的理论与模型日趋完善,但限于交通流的复杂性和随机性,元胞自动机的研究工作一直还在进行着,甚至对一维元胞自动机交通流模型的研究.Nagel,Schrekenberg应用元胞自动机理论对高速公路的一维交通流进行了较深入的研究,但是,NS模型没有考虑前后车辆的相对运动,即t+1时刻i元胞的运动速度只与t时刻i元胞与i +1元胞间的距离有关,而与t+1时刻i+1元胞的移动量无关.薛郁等在NS模型基础上考虑了前后车辆的相对运动,并给出了新的一维元胞自动机演化规则,与NS模型相比,改进的NS模型与实测数据符合度更好[4].但改进的NS模型还不尽周严和合理,经分析,主要是没有考虑车辆的行车状态,作者在改进的NS模型的基础上提出了考虑行车状态的一维元胞自动机交通流模型,并加入了一条新规则2反馈规则.本文首先在第二部分以两种情况给出改进的NS模型可能存在的问题;第三部分给出修正后的一维元胞自动机交通流模型;第四部分通过计算机模拟得到修正后的结果,并加以分析;最后对全文做出总结.21改进的NS模型及存在问题改进的NS模型通过引入相对运动量ΔXi+1(t)对NS模型进行了修改,以Xi(t)表示第i个车辆在t时刻的位置;V i(t)表示第i个车辆在t时刻的速度,Vmax表示系统设定的最大速度;gapi(t)表示第i个车辆在t时刻与前方紧邻车辆的间距,gapi(t)= X i+1(t)-X i(t)-1;P noise表示车辆具有的减速概率;ΔXi+1(t)表示第i+1个车辆t+1时刻与t时刻的位移量,因为时间间隔为单位时间,所以位移量就等于第i+1个车辆t+1时刻的速度,ΔXi+1(t) =X i+1(t+1)-X i+1(t)=V i+1(t+1).同样,改进的NS模型将初始速度分布为0—V max的N个车辆随机第54卷第6期2005年6月100023290Π2005Π54(06)Π2595205物 理 学 报ACT A PHY SIC A SI NIC AV ol.54,N o.6,June,2005ν2005Chin.Phys.S oc.地分布在长度为L 的一维离散的格点链上,并在考虑周期边界条件下,给出间距的确定规则如下:(1)确定所有车辆i 在t +1时刻的速度分布:IF (V i (t )≥gap i (t )+ΔX i +1(t )):V i (t +1)=gap i (t )+ΔX i +1(t )-1,以概率p noise gap i (t )+ΔX i +1(t ),其他 (跟车Π减速规则),E LSE IF (V i (t )<V max )V i (t +1)=V i (t ),以概率p noise V i (t )+1,其他 (加速规则),E LSE IF (V i (t )=V max 且V i (t )<gap i (t )+ΔX i +1(t ))V i (t +1)=V max -1,以概率p noise V max ,其他 (自由运动规则). (2)确定所有车辆i 在t +1时刻的位置:X i (t +1)=X i (t )+V i (t +1) 下面用两种情况指出改进的NS 模型中可能存在的问题:情况1 在t 时刻,如果V i +1(t )=0,V i (t )=0,gap i (t )=0,那么在t +1时刻,当V i +1(t +1)=0,则ΔX i +1(t )=0(),车辆i 满足条件V i (t )≥gap i (t )+ΔX i +1(t ),则按跟车Π减速规则,得到V i (t +1)=-1,以概率p noise ,0,其他. 如何解释V i (t +1)以概率P noise 等于-1?再者,理论上V i (t +1)必定等于0,而不是以某一概率等于0.情况2 在t 时刻,如果V i +1(t )=1,V i (t )=4,gap i (t )=4,那么在t +1时刻,当V i +1(t +1)=0,则ΔX i +1(t )=0(停车状态),车辆i 满足条件V i (t )≥gap i (t )+ΔX i +1(t ),则按跟车Π减速规则,得到V i (t +1)=3, 以概率p noise ,4, 其他,gap i (t +1)=1, 当V i (t +1)=3,0, 当V i (t +1)=4. 这里可以看到,当前车停车后,后车速度比较快时,后车仍以1-P noise 的概率跟车,而没有采取减速措施,虽然模型中的后车不会碰上前车,但这是不符合车流特性的.再推进一个时间步,即t +2时刻,取V i (t +1)=4(跟车),当V i +1(t +2)=0,则ΔX i +1(t +1)=0(停车状态),车辆i 满足条件V i (t +1)≥gap i (t +1)+ΔX i +1(t +1),则按跟车Π减速规则,得到V i (t +2)=-1,以概率p noise ,0,其他. 这里仍存在V i (t +2)=-1,即倒车现象.另外可以看出,前车在刹车两个时间步后,后车是一步刹车而减为0,如果在满足刹车条件时先减速,再刹车可能更符合车流特性.从情况1和情况2可以看出,改进的NS 模型虽然将车辆间的相对运动量引入了NS 模型,但没有将前车的行车状态考虑进模型中,所以出现倒车、刹车过急等不尽周严和合理的现象.31考虑前车行车状态的新模型新的模型将前车的行车状态分成停车状态和行进状态,用δi +1(t )表示前车t 时刻的行车状态:δi +1(t )=1, 当ΔX i +1(t )=0(停车状态),0, 当ΔX i +1(t )>0(行进状态),其他变量定义同前,在模型中同时还添加了反馈规则,以避免不尽合理的急刹车.在本模型中仍是将初始速度分布为0—V max 的N 个车辆随机地分布在长度为L 的一维离散的格点链上,在考虑周期边界条件下,给出间距的确定规则如下:1)确定所有车辆i 在t +1时刻的速度分布:6952物 理 学 报54卷IF (V i (t )≥gap i (t )+ΔX i +1(t )):(减速规则) V i (t +1)=0,当gap i (t )=0(后车必停车)gap i (t )-1,当gap i (t )>0(后车必减速),当δi +1(t )=1 V i (t +1)=gap i (t )+ΔX i +1(t )-1,以概率p noise gap i (t )+ΔX i +1(t ),以概率1-p noise,当δi +1(t )=0E LSE 2IF (V i (t )<V max ):(加速规则) V i (t +1)=V i (t ),以概率p noiseV i (t )+1,以概率1-p noise E LSE (V i (t )=V max ):(自由运动规则) V i (t +1)=V max -1,以概率p noise V max ,以概率1-p noiseIF (V i (t +1)=gap i (t )且gap i (t )>1):V i (t +1)=V i (t +1)-δi +1(t )(反馈规则) 2)确定所有车辆i 在t +1时刻的位置:X i (t +1)=X i (t )+V i (t +1). 根据上述规则进行模拟,并由一维格点链计算公式:车辆密度ρ=N L,t 时刻的平均速度 V (t )=1N∑Ni =1V i (t ),及t 时刻的平均车流量 J (t )=ρ× V (t ),ρ2V 关系曲线、车流量与车辆密度的ρ2J 关系曲线,以及平均速度与车流量V 2J 关系曲线.其中N 为分布在格点链L 上的车辆数.模拟中的道路长度L 为715km ,用1000个格点表示,车辆以初始速度分布为0—V max 随机地分布在1000个一维离散的格点上,边界为周期边界条件.如果取单位时间步长为1s ,则最大速度V max =5相当于135km Πh.因为模拟中采取了周期边界条件,所以对于某次模拟,格点中的车辆数N 固定不变,那么车流密度ρ也是常数.因此,通过改变每次模拟中的车流密度和减速概率P noise ,可以观察对应车流速度和车流量的变化趋势.41计算机模拟及分析通过计算机模拟结果可知,减速概率P noise 对车流速度的影响相当大,在文献[4]中作者给出了减速概率与车辆密度的关系,但减速概率还同路况、驾驶员等诸多因素有关,所以本文中没有沿用文献[4]中的关系式,而取P noise 为0110,0125和0150三种概率进行模拟比较;每次模拟的总时间步长为60000个单位时间步,所有的平均速度为50000—55000时间步内的算术平均值,这样可以避免初始状态的影响;每个时间步车辆i 选择规则所需的随机数满足0—1平均分布,且相互独立.图1所示为车辆位置随时间推移的演化过程图,取400格点后的车流位置:(a )部分为车辆密度ρ=0109、减速概率P noise =0109条件下的车流演化过程.可以看出整个车流位置呈线形演化,基本维持车辆间距不变;(b )部分为车辆密度ρ=0109、减速概率P noise =0180条件下的车流演化过程.虽然车流密度很低,但在局部地方还是发生了车辆较长时间的停滞,并引起后续车辆的停滞.由此可以看出:减速概率对车流行进的影响很大,而且车辆一旦停滞,由于减速概率大,加速概率小,所以车流启动也很缓慢;(c )部分为车辆密度ρ=0150、减速概率P noise =0150条件下的车流演化过程.图示中存在很明显的“波”传递过程,竖黑线部分表示车辆停滞状态,白色断层部分表示车辆行进状态,由于车辆密度高,减速概率大,所以前车的行车状态对后续车辆的行车状态影响很大.图2给出了不同减速概率下的车流密度ρ与平均速度V 的关系图.同样看出减速概率对车流速度的影响很明显,近线性关系;在车流密度较小时,车流速度变化不大;当车流密度达到一定程度时,车流速度出现了明显的拐点;车流速度为零,即发生大面积堵塞时,车流密度还没有达到0190,从理论上分析,只要密度不等于1100,车辆间就有空格,那么个别车辆会爬行,出现这种结果与计算机的计算精度有关.图2中,对应P noise =0110的ρ2V 曲线:最大的平均速度V =132132km ・h-1;当ρ=0146时,车速出现拐点,此时平均速度V =130154km ・h-1;当平均速79526期花 伟等:考虑行车状态的一维元胞自动机交通流模型度V 接近零时,ρ=0176.对应P noise =0125的ρ2V 曲线:最大的平均速度V =128191km ・h -1;当ρ=0123时,车速出现拐点,此时平均速度V =123160km ・h -1;当平均速度V 接近零时,ρ=0162.对应P noise =0150的ρ2V 曲线:最大的平均速度V =121165km ・h-1;当ρ=0111时,车速出现拐点,此时平均速度V=119100km ・h -1;当平均速度V 接近零时,ρ=0156.从模拟结果看,无论密度多小,减速概率多小,车速都没有达到最大速度135100km ・h -1,这说明车辆速度存在波动.图1 位置与时间关系图图2 对应不同P n oise 的平均速度V 与密度ρ关系图图3 对应不同P n oise 的平均速度V 与流量J 关系图 图3给出了不同减速概率下的平均速度V 与流量J 的关系图.当在一定车速范围内,车流量呈线性增加,但车速到达某一速度值后,车流量反呈非线性递减;当车速太快(密度小)和太慢时,流量都很小.对应P noise =0110的V 2J 曲线:当车速最大,即V =132120km ・h -1时,流量J =88113veh ・h -1;当车速在132120—130171km ・h -1时,流量呈线性递增;当车速V =130100km ・h -1时,流量出现拐点,即达到最大值,J max =6760100veh ・h -1;当车速在130100—0100km ・h -1时,流量呈非线性递减.对应P noise =0125的V 2J 曲线:当车速最大,即V =128141km ・h -1时,流量J =85160veh ・h -1;当车速在128141—125160km ・h -1时,流量呈线性递增;当车速V =123134km ・h -1时,流量出现拐点,即达到最大值,J max =3617197veh ・h -1;当车速在123134—0100km ・h -1时,流量呈非线性递减.对应P noise =0150的V 2J 曲线:当车速最大,即V =121152km ・h -1时,流量J =81103veh ・h -1;当车速在121152—120152km ・h -1时,流量呈线性递增;当车速V =119100km ・h -1时,流量出现拐点,即达到最大值,J max =1904100veh ・h -1;当车速在119100—0100km ・h -1时,流量呈非线性递减.与NS 模型和改进的NS 模型相比较,车流量总体偏大,说明车流总体停滞次数减少.51结 论本文通过两种情况指出改进的NS 模型存在着8952物 理 学 报54卷不尽周严的问题,随之引入行车状态变量,在前车停止行进时,后车相应采取减速措施,而不是随机减速;另外,补充了一条全新的车辆运动规则———反馈规则,进一步控制车辆的急刹车现象.计算机模拟结果显示,车流量相比增大,这是车流总体停滞次数减少的结果,说明改进模型是有效的.[1]W ang B H et al 1998Acta Phys .Sin .47906(in Chinese )[汪秉宏等1998物理学报47906][2]L üX Y et al 1998Acta Phys .Sin .471761(in Chinese )[吕晓阳等1998物理学报471761][3]Huang P H et al 2001Acta Phys .Sin .5030(in Chinese )[黄乒花等2001物理学报5030][4]Xue Y et al 2001Acta Phys .Sin .50445(in Chinese )[薛 郁等2001物理学报50445][5]T an H L et al 2002Acta Phys .Sin .512713(in Chinese )[谭惠丽等2002物理学报512713][6]Xue Y 2004Acta Phys .Sin .5325(in Chinese )[薛 郁2004物理学报5325][7]Neumann V 1966Theory o f Self 2Reproducing Automata (Urbana :University of Illinois Press )[8]W olfram S 1986Theory and Application o f Cellular Automata (S ingapore :W orld Scientific )[9]Ishibashi Y and Fukui M 1994J .Phys .Soc .Japan ,632882[10]Nagel K and Schrekenberg M 1992J .Physique I France 22221[11]Biham O ,M iddleton A A and Levine D 1992Phys .Rev .A 46R6124One -dimensional traffic cellular automaton modelwith considering the vehicle moving statusHua W ei Lin Bo-Liang(K ey Laboratory o f Intelligent Technologies and Systems o f Tra ffic and Transportation ,Beijing Jiaotong Univer sity ,Beijing 100044,China )(Received 28June 2004;revised manuscript received 19October 2004)AbstractBased on the single lane traffic cellular automaton (C A )m odel introduced by Nagel and Schreckenberg (called NS m odel ),Xue Y u et al proposed an im proved single lane traffic C A m odel by considering the relative m otion of vehicles (called im proved NS m odel ).Several faults in the im proved NS m odel using tw o exam ples is pointed out and also another single lane traffic C A m odel by introducing vehicle-m oving -status variable and feedback rule is proposed.These methods help to prevent vehicle from m oving backward and stopping hurry.Numerical simulations are carried out and the results indicate that the deceleration probability and traffic density have a heavy im pact on the ev olution process of traffic flow.Under the condition of high deceleration probability ,there may happen local traffic jams even with low traffic density.And with a constant deceleration probability ,the global free phases and jam phases will appear alternately as the traffic density increases to a certain level.The phenomenon is very sim ilar to the propagation of wave.The traffic flow is higher in the new m odel than in the im proved NS m odel.This proves that the stop status of the whole traffic flow has been im proved.K eyw ords :traffic flow ,cellular automata ,vehicle m oving status ,feedback rule PACC :055099526期花 伟等:考虑行车状态的一维元胞自动机交通流模型。
交通流中的NaSch模型及MATLAB代码元胞自动机元胞自动机 NaSch模型及其MATLAB代码作业要求根据前面的介绍,对NaSch模型编程并进行数值模拟:●模型参数取值:Lroad=1000,p=0.3,Vmax=5。
●边界条件:周期性边界。
●数据统计:扔掉前50000个时间步,对后50000个时间步进行统计,需给出的结果。
●基本图(流量-密度关系):需整个密度范围内的。
●时空图(横坐标为空间,纵坐标为时间,密度和文献中时空图保持一致, 画500个时间步即可)。
●指出NaSch模型的创新之处,找出NaSch模型的不足,并给出自己的改进思路。
●流量计算方法:密度=车辆数/路长;流量flux=density×V_ave。
在道路的某处设置虚拟探测计算统计时间T内通过的车辆数N;流量flux=N/T。
●在计算过程中可都使用无量纲的变量。
1、NaSch模型的介绍作为对184号规则的推广,Nagel和Schreckberg在1992年提出了一个模拟车辆交通的元胞自动机模型,即NaSch模型(也有人称它为NaSch模型)。
●时间、空间和车辆速度都被整数离散化。
图3.1.1 NaSch模型运行图图3.1.2 NaSch模型3.2流量密度分析图 3.2描述了交通流量与密度的关系,从图中可知,该模型中,当密度为0——0.185时,流量随密度的增加而增加;当密度超过0.185时,流量开始随密度的增加而下降。
图3.2 基于NaSch模型的流量密度图3.3 NaSch模型时空图分析图3.3.1和图3.3.2描述了,时间步从11001开始到11500结束,共500个时间步的空间和时间的关系,从图中可以模拟出自发产生的堵塞现象。
图3.3.1 基于NaSch模型的时空图图3.3.2 基于NaSch模型的时空图4 模型评价优点:该程序基本实现了NaSch模型的基本功能,并且最大速度、元胞数量、车辆数量以及运行间隔时间都可以修改,程序很灵活,并且可以清晰的看出每一次运行过程。
双向航道船舶交通流元胞自动机模型及仿真双向航道船舶交通流元胞自动机模型及仿真引言随着全球经济的快速发展和全球化的深入推进,海上贸易的规模和船舶交通量不断增加。
而作为海上交通的重要组成部分,船舶交通流的研究对于提高海上交通的效率和安全性具有重要意义。
船舶交通流的研究一直是交通工程、水运工程和海洋工程等领域的热点之一。
然而,由于船舶交通流的复杂性和随机性,传统的研究方法往往难以取得满意的结果。
为了更好地理解船舶交通流的特性和行为规律,提高海上交通的安全性和效率,研究者们提出了许多不同的方法。
其中,元胞自动机模型是一种常用的方法,它可以模拟和分析复杂系统的运行和演化。
元胞自动机模型是由许多简单的单元格组成的、具有局部相互作用和全局演化的离散动力学系统。
在船舶交通流的研究中,元胞自动机模型可以用来模拟船舶的运动和交互行为,进而分析船舶交通流的特性和行为规律。
本文将介绍一种基于元胞自动机的双向航道船舶交通流模型,并通过仿真实验来验证模型的有效性和可行性。
模型介绍双向航道船舶交通流模型是基于元胞自动机的,其中每个元胞代表着船舶的空间位置和状态。
模型中的每个船舶都有自己的速度和方向,可以根据当前位置和周围环境做出相应的决策。
模型的基本设定如下:1. 每个船舶具有唯一的标识符、位置、速度和方向,可以向前、向后或停止。
2. 船舶的运动过程是离散的,每个时间步长都会更新船舶的位置。
3. 航道上的每个位置只能容纳一个船舶,如果多个船舶同时抵达同一位置,则会发生碰撞。
4. 船舶之间存在相互作用,可以通过通信和观测其他船舶的位置和状态。
模型的运行过程如下:1. 初始化航道和船舶的初始位置、速度和方向。
2. 每个时间步长,更新每个船舶的位置。
3. 对每个船舶,根据当前位置和周围环境做出决策,包括前进、后退或停止。
4. 根据船舶的决策更新船舶的速度和方向。
5. 检查船舶之间的碰撞情况,如果有碰撞发生,则进行相应的处理。
6. 重复步骤2到5,直到达到预定的仿真时间。