控制工程基础实验报告
- 格式:docx
- 大小:183.31 KB
- 文档页数:12
本科生课程论文控制工程基础仿真实验报告实验一一阶系统的单位阶跃响应一、实验目的1、学会使用ATLABM编程绘制控制系统的单位阶跃响应曲线;2、掌握准确读取动态特征指标的方法;3、研究时间常数T对系统性能的影响;4、掌握一阶系统11Ts+时间响应分析的一般方法;5、通过仿真实验,直观了解各典型环节的时间响应和频率响应,巩固课程中所学的基本概念和基本原理;二、实验要求1、输入3个不同的时间常数T,观察一阶系统11Ts+的单位阶跃响应曲线的变化,绘制响应曲线图,并分析时间常数T对系统性能的影响。
2、若通过实验已测得一阶系统11Ts+的单位阶跃响应曲线,试说明如何通过该曲线确定系统的时间常数T。
三、实验内容(一)实验设备计算机;WINDOWS操作系统,并安装Matlab语言编程环境。
(二)实验原理通过对各种典型环节的仿真实验,可以直观的看到各种环节的时间响应和频率响应的图像。
通过对所得图像的分析可以得出各种参数如何影响系统的性能。
四、实验过程在Matlab平台对一阶系统11Ts+的单位阶跃响应进行仿真。
(1)输入3个不同的时间常数T,观察一阶系统单位阶跃响应曲线的变化,绘制响应曲线图,并分析时间常数T对系统性能的影响。
在Matlab中进行操作,其代码如下:1.num=1;2.den=[11];3.g=tf(num,den)4.5.g =6.7.18. -----9. s + 110.11.Continuous-time transfer function.12.13.>> step(g)14.hold on15.>> step(tf(1,[21]))16.>> step(tf(1,[41]))17.>> legend('T=1','T=2','T=4');(2)对于已测得的一阶系统的单位阶跃响应曲线,分析通过该曲线确定系统的时间常数T的方法。
《控制工程基础》实验报告姓名欧宇涵 914000720206周竹青 914000720215 学院教育实验学院指导老师蔡晨晓南京理工大学自动化学院2017年1月实验1:典型环节的模拟研究一、实验目的与要求:1、学习构建典型环节的模拟电路;2、研究阻、容参数对典型环节阶跃响应的影响;3、学习典型环节阶跃响应的测量方法,并计算其典型环节的传递函数。
二、实验内容:完成比例环节、积分环节、比例积分环节、惯性环节的电路模拟实验,并研究参数变化对其阶跃响应特性的影响。
三、实验步骤与方法(1)比例环节图1-1 比例环节模拟电路图比例环节的传递函数为:K s U s U i O =)()(,其中12R RK =,参数取R 2=200K ,R 1=100K 。
步骤: 1、连接好实验台,按上图接好线。
2、调节阶跃信号幅值(用万用表测),此处以1V 为例。
调节完成后恢复初始。
3、Ui 接阶跃信号、Uo 接IN 采集信号。
4、打开上端软件,设置采集速率为“1800uS”,取消“自动采集”选项。
5、点击上端软件“开始”按键,随后向上拨动阶跃信号开关,采集数据如下图。
图1-2 比例环节阶跃响应(2)积分环节图1-3 积分环节模拟电路图积分环节的传递函数为:ST V V I I O 1-=,其中T I =RC ,参数取R=100K ,C=0.1µf 。
步骤:同比例环节,采集数据如下图。
图1-4 积分环节阶跃响应(3)微分环节图1-5 微分环节模拟电路图200KRV IVoC2CR 1V IVo200K微分环节的传递函数为:K S T S T V V D D I O +-=1,其中 T D =R 1C 、K=12R R。
参数取:R 1=100K ,R 2=200K ,C=1µf 。
步骤:同比例环节,采集数据如下图。
图1-6 微分环节阶跃响应(4)惯性环节图1-7 惯性环节模拟电路图惯性环节的传递函数为:1+-=TS K V V I O ,其中2T R C =,21RK R =-。
《控制工程基础》实验任务实验一 系统时域响应分析1. 实验目的本实验的主要目的是:通过实验使学生进一步理解系统参数对时域响应的影响,理解系统参数与时域性能指标之间的关系,同时了解系统稳定性的充要条件。
本实验的内容覆盖了教材第3、4、5章的内容。
2. 实验内容完成一阶、二阶系统在典型输入信号作用下的响应,求取二阶系统的性能指标,记录试验结果并对此进行分析。
3. 实验要求要求掌握应用MATLAB 软件的相应功能,实现一阶、二阶系统在典型输入信号(包括单位脉冲信号、单位阶跃信号、单位斜坡信号、正弦信号等)作用下的响应;记录实验结果并对结果进行分析,要求用实验结果来分析系统特征参数对系统时间响应的影响。
4. 实验地点工字楼127。
5. 实验过程一、系统的传递函数及其MATLAB 表达 (1)一阶系统 传递函数为:1)(+=Ts Ks G 传递函数的MATLAB 表达: num=[k];den=[T,1];G(s)=tf(num,den) (2)二阶系统 传递函数为:2222)(nn n w s w s w s G ++=ξ传递函数的MATLAB 表达: num=[wn^2];den=[1,2*s* wn ,wn^2];G(s)=tf(num,den) (3)任意的高阶系统传递函数为:nn n n m m m m a s a s a s a b s b s b s b s G ++++++++=----11101110)(传递函数的MATLAB 表达:num=[m m b b b b ,,,110- ];den=[n n a a a a ,,,110- ];G(s)=tf(num,den) 若传递函数表示为:)())(()())(()(1010n m p s p s p s z s z s z s Ks G ------=则传递函数的MATLAB 表达:z=[m z z z ,,,10 ];p=[n p p p ,,,10 ];K=[K];G(s)=zpk(z,p,k) 二、 各种时间输入信号响应的表达 (1)单位脉冲信号响应:[y,x]=impulse(sys,t) (2)单位阶跃信号响应:[y,x]=step(sys,t) (3)任意输入信号响应:[y,x]=lsim(sys,u,t)其中,y 为输出响应,x 为状态响应(可选);sys 为建立的模型;t 为仿真时间区段(可选),u 为给定输入信号(列向量)。
实验一典型环节阶跃响应一、实验目的1.掌握控制系统模拟实验的基本原理和方法;2.掌握典型环节阶跃响应曲线的测量和分析方法。
二、实验仪器1. XK-KL1型自动控制系统实验箱一台2.计算机一台三、实验原理控制系统模拟实验采用复合网络法来模拟各种典型环节,即利用运算放大器不同的输入网络和反馈网络模拟各种典型环节,然后可按给定的系统电路图将其连接,以获得相应的模拟系统;再将输入信号加到模拟系统的输入端,利用计算机测量系统的输出,便可获得系统的响应曲线及性能指标,若改变系统参数,可进一步分析研究参数对系统性能的影响。
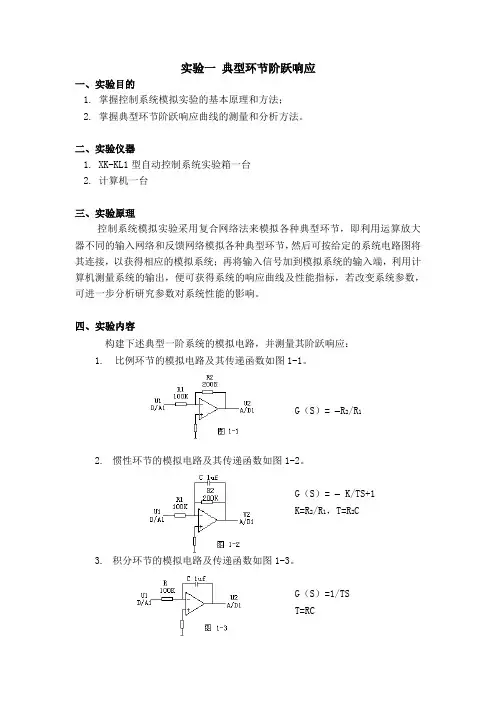
四、实验内容构建下述典型一阶系统的模拟电路,并测量其阶跃响应:1.比例环节的模拟电路及其传递函数如图1-1。
G(S)= -R2/R12.惯性环节的模拟电路及其传递函数如图1-2。
G(S)= - K/TS+1K=R2/R1,T=R2C3.积分环节的模拟电路及传递函数如图1-3。
G(S)=1/TST=RC4.微分环节的模拟电路及传递函数如图1-4。
G(S)= - RCS5. 比例+微分环节的模拟电路及传递函数如图1-5(未标明的C=0.01uf)。
G(S)= -K(TS+1)K=R2/R1,T=R2C6. 比例+积分环节的模拟电路及传递函数如图1-6。
G(S)=K(1+1/TS)K=R2/R1,T=R2C五、实验步骤1.启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。
2.测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
比例环节3.连接被测量典型环节的模拟电路(图1-1)。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。
检查无误后接通电源。
4.在实验课题下拉菜单中选择实验一[典型环节及其阶跃响应] 。
5.鼠标单击实验课题弹出实验课题参数窗口。
在参数设置窗口中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果。
控制工程基础[英]实验实验一.典型环节的模拟研究:已知一个小车、倒单摆系统非线性系统方程为:( 2.92)0.008x x u =-+20.004sin 36cos n n x θωθωθθ=-+-其中假设 (0)0;(0)0.2x x ==,(0)0;(0); 6.781,n θθπω===(1)要求绘出系统[0,10]t ∈的状态响应曲线(2)并将上述系统在0θ≈的条件下线性化,并要求绘出线性化后系统[0,10]t ∈的状态响应曲线,并与非线性系统状态响应曲线相比较。
(1)下面利用Simulink 对该系统进行仿真如下图所示。
图1.倒单摆系统仿真图在图中已经对主要信号进行了标注下面给出每个未标注信号后加入放大器的增益:008.092.2=阶跃K 008.01-=一阶微分x K 98.45=二阶微分θK通过示波器Scope 和Scope1观察x(t)和θ(t)的波形图如下所示。
图2.x(t)波形图3.θ(t)波形(2)将上述系统在0θ≈的条件下线性化,则方程组改写成如下形式:( 2.92)0.008x x u=-+20.004sin36n n xθωθωθ=-+-在Simulink中对系统仿真如下所示。
图4.线性化后仿真系统通过示波器模块可以观察输出信号,图形如下图所示。
图5.x(t)输出波形图6.θ(t )输出波形实验二.典型系统时域响应动、静态性能和稳定性研究; 已知系统的开环传递函数为2()11G s s s =++(1)利用已知的知识判断该开环系统的稳定性(系统的特征方程根、系统零极点表示法)。
(2)判别系统在单位负反馈下的稳定性,并求出闭环系统在[0,10]t ∈内的脉冲响应和单位阶跃响应,分别绘制出相应响应曲线。
(1)该系统的特征方程的根、零极点表示的求解代码如下:输出结果如下图所示。
图7.特征方程求根结果图8.零极点分布图从图中可以看出两个极点在虚轴上,所以该系统处于临界稳定状态。
控制工程基础实验报告控制工程基础实验报告引言:控制工程是一门涉及自动化、电子、计算机等多个学科的交叉学科,其实验是培养学生动手能力和实践能力的重要环节。
本篇文章将以控制工程基础实验为主题,探讨实验的目的、过程和结果等方面。
实验目的:控制工程基础实验的目的是让学生通过实践了解控制系统的基本原理和方法,培养其分析和解决问题的能力。
通过实验,学生可以掌握闭环控制系统的设计与调试技巧,加深对控制理论的理解。
实验内容:本次实验的内容是设计一个简单的温度控制系统。
系统由温度传感器、控制器和加热器组成。
温度传感器采集环境温度,控制器根据设定的温度值来控制加热器的工作状态,以维持温度在设定值附近。
实验步骤:1. 搭建实验平台:将温度传感器、控制器和加热器按照实验要求连接起来,确保电路正常工作。
2. 设计控制算法:根据控制系统的要求,设计合适的控制算法。
可以采用比例控制、积分控制或者PID控制等方法。
3. 参数调试:根据实验平台和控制算法的特点,调试控制器的参数,使系统能够快速、稳定地响应设定值的变化。
4. 实验数据采集:通过实验平台上的数据采集器,记录系统的输入和输出数据,以便后续分析和评估。
实验结果:经过实验,我们得到了一组温度控制系统的数据。
通过对这些数据的分析,我们可以评估系统的控制性能和稳定性。
在实验中,我们使用PID控制算法,经过参数调试,得到了较好的控制效果。
系统能够在设定值附近稳定工作,并且对设定值的变化能够快速响应。
实验总结:通过这次实验,我们深入了解了控制工程的基本原理和方法。
实践中遇到的问题和挑战,锻炼了我们的动手能力和解决问题的能力。
实验结果表明,合适的控制算法和参数调试是实现良好控制效果的关键。
控制工程实验的重要性不言而喻,它不仅是理论学习的延伸,更是培养学生实践能力的重要途径。
结语:控制工程基础实验是掌握控制工程理论和方法的重要环节。
通过实践,学生能够更好地理解和应用所学知识,提高解决实际问题的能力。
自动控制理论实验报告实验一典型环节的时域响应院系:班级:学号:姓名:实验一 典型环节的时域响应一、 实验目的1.掌握典型环节模拟电路的构成方法,传递函数及输出时域函数的表达式。
2.熟悉各种典型环节的阶跃响应曲线。
3.了解各项参数变化对典型环节动态特性的影响。
二、 实验设备PC 机一台,TD-ACC+教学实验系统一套。
三、 实验步骤1、按图1-2比例环节的模拟电路图将线接好。
检查无误后开启设备电源。
注:图中运算放大器的正相输入端已经对地接了100k 电阻。
不需再接。
2、将信号源单元的“ST ”端插针与“S ”端插针用“短路块”接好。
将信号形式开关设为“方波”档,分别调节调幅和调频电位器,使得“OUT ”端输出的方波幅值为1V ,周期为10s 左右。
3、将方波信号加至比例环节的输入端R(t), 用示波器的“CH1”和“CH2”表笔分别监测模拟电路的输入R(t)端和输出C(t)端。
记录实验波形及结果。
4、用同样的方法分别得出积分环节、比例积分环节、惯性环节对阶跃信号的实际响应曲线。
5、再将各环节实验数据改为如下:比例环节:;,k R k R 20020010== 积分环节:;,u C k R 22000==比例环节:;,,u C k R k R 220010010=== 惯性环节:。
,u C k R R 220010=== 用同样的步骤方法重复一遍。
四、 实验原理、内容、记录曲线及分析下面列出了各典型环节的结构框图、传递函数、阶跃响应、模拟电路、记录曲线及理论分析。
1.比例环节 (1) 结构框图:图1-1 比例环节的结构框图(2) 传递函数:K S R S C =)()( KR(S)C(S)(3) 阶跃响应:C(t = K ( t ≥0 ) 其中K = R 1 / R 0 (4) 模拟电路:图1-2 比例环节的模拟电路图(5)记录曲线:(6)k R k R 20020010==,时的记录曲线:_R0=200kR1=100k_ 10K10KC(t)反相器 比例环节 R(t)(7)曲线分析:比例放大倍数K 与1R 的阻值成正比。
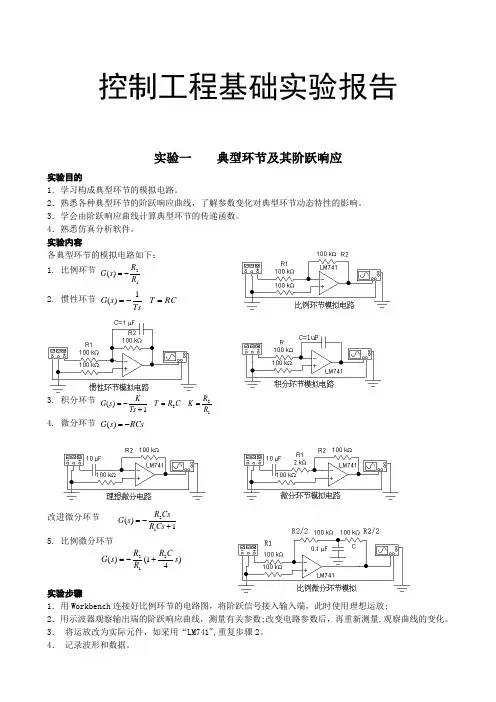
控制工程基础实验报告实验一 典型环节及其阶跃响应实验目的1.学习构成典型环节的模拟电路。
2.熟悉各种典型环节的阶跃响应曲线,了解参数变化对典型环节动态特性的影响。
3.学会由阶跃响应曲线计算典型环节的传递函数。
4.熟悉仿真分析软件。
实验内容各典型环节的模拟电路如下:1. 比例环节 12)(R R s G -=2. 惯性环节 RC T Tss G =-=1)(3. 积分环节 1221)(R R K C R T Ts Ks G ==+-=4. 微分环节 RCs s G -=)(改进微分环节1)(12+-=Cs R Cs R s G 5. 比例微分环节)41()(212s C R R R s G +-=实验步骤1.用Workbench 连接好比例环节的电路图,将阶跃信号接入输入端,此时使用理想运放;2.用示波器观察输出端的阶跃响应曲线,测量有关参数;改变电路参数后,再重新测量,观察曲线的变化。
3. 将运放改为实际元件,如采用“LM741",重复步骤2。
5.仿真其它电路,重复步骤2,3,4。
实验总结通过这次实验,我对典型环节的模拟电路有了更加深刻的了解,也熟悉了各种典型环节的阶跃响应曲线,了解参数变化对典型环节动态特性的影响;熟悉仿真分析软件。
这对以后的控制的学习有很大的帮助。
实验二 二阶系统阶跃响应实验目的1. 研究二阶系统的两个重要参数阻尼比ξ和无阻尼自然频率ωn 对系统动态性能的影响。
2. 学会根据阶跃响应曲线确定传递函数,熟悉二阶系统的阶跃响应曲线。
实验内容二阶系统模拟电路如图: 1)/(1)(12222++-=RCs R R s C R s G 思考:如何用电路参数表示ξ和ωn实验步骤1. 在workbench 下连接电路图;将阶跃信号接入输入端,用示波器观测记录响应信号;2.取ωn=10rad/s,即令R=100K,C=1uf :分别取ξ=0,0.25,0.5,0.7,1,2, 即取R1=100K,考虑R2应分别取何值,分别测量系统阶跃响应,并记录最大超调量δp%和调节时间ts 。
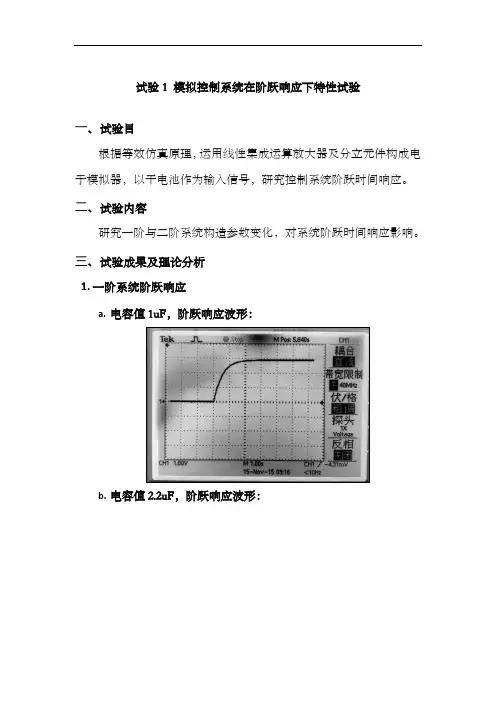
试验1 模拟控制系统在阶跃响应下特性试验一、试验目根据等效仿真原理,运用线性集成运算放大器及分立元件构成电子模拟器,以干电池作为输入信号,研究控制系统阶跃时间响应。
二、试验内容研究一阶与二阶系统构造参数变化,对系统阶跃时间响应影响。
三、试验成果及理论分析1.一阶系统阶跃响应a.电容值1uF,阶跃响应波形:b.电容值2.2uF,阶跃响应波形:c. 电容值4.4uF ,阶跃响应波形:2. 一阶系统阶跃响应数据表电容值 (uF ) 稳态终值U c (∞)(V ) 时间常数T(s) 理论值 实际值 理论值 实际值 1.0 2.87 2.90 0.51 0.50 2.2 2.87 2.90 1.02 1.07 4.42.872.902.242.06元器件实测参数U r = -2.87VR o =505k ΩR 1=500k ΩR 2=496k Ω其中C R T 2=r c U R R U )/()(21-=∞误差原因分析:①电阻值及电容值测量有误差;②干电池电压测量有误差;③在示波器上读数时产生误差;④元器件引脚或者面包板老化,导致电阻变大;⑤电池内阻影响输入电阻大小。
⑥在C=4.4uF试验中,受硬件限制,读数误差较大。
3.二阶系统阶跃响应a.阻尼比为0.1,阶跃响应波形:b.阻尼比为0.5,阶跃响应波形:c.阻尼比为0.7,阶跃响应波形:d.阻尼比为1.0,阶跃响应波形:4.二阶系统阶跃响应数据表ξR w(Ω)峰值时间t p(s)U o(t p)(V)调整时间t s(s)稳态终值U s(V)超调(%)M p震荡次数N0.1 454k 0.3 4.8 2.8 2.95 62.7 6 0.5 52.9k 0.4 3.3 0.5 2.95 11.9 10.7 24.6k 0.4 3.0 0.3 2.92 2.7 11.02.97k 1.0 2.98 1.0 2.98 0 0四、回答问题1.为何要在二阶模拟系统中设置开关K1和K2,并且必须同步动作?答:K1作用是用来产生阶跃信号,撤除输入信后,K2则是构成了C2放电回路。
控制工程基础实验报告班级_____________姓名_____________河南科技大学机电工程学院实验中心2010-9-24实验一典型环节时间响应分析结合报告重点预习: 各环节电路结构、时间响应函数、及各环节在零点输出值。
一实验目的:二实验设备:三实验原理:四实验内容及数据整理:1、阶跃信号(方波)的产生方式2、画出各典型环节方块图(写出传递函数)、模拟电路图(注明元件参数)及实际输出响应函数。
1)比例(P)环节方块图:模拟电路图:实验数据记录及其对阶跃信号响应曲线2)惯性(T)环节方块图:模拟电路图:实验数据记录及其对阶跃信号响应曲线3)积分(I)环节方块图:模拟电路图:实验数据记录及其对阶跃信号响应曲线4)比例积分(PI)环节方块图:模拟电路图:实验数据记录及其对阶跃信号响应曲线5)比例微分(PD)环节方块图:模拟电路图:实验数据记录及其对阶跃信号响应曲线五思考题1、实验中每个典型环节使用了两个模拟运放单元,第二个模拟运放单元起什么作用?2、根据PD环节对阶跃信号的响应曲线,试分析电路工作过程。
3、惯性环节分别在什么情况下可近似为比例环节和积分环节?实验二控制系统的频率特性结合报告重点预习:开环传递函数、开环频率特性幅值相位、及如何通过BODE图确定系统参数K和T 的值。
一实验目的:二实验设备:三实验原理:四实验记录1、正弦信号的产生方式2、画出被测系统的方块图及模拟电路图(注明元件参数)。
3、实验数据处理及被测系统的开环对数幅频曲线和相频曲线4、开环频率特性Bode图:5、根据Bode图求出系统开环传递函数五思考题1、根据测得的Bode图的幅频特性,就能确定系统的相频特性,试问这在什么系统时才能实现?2、在Bode图中,为什么横坐标习惯采用对数进行分度?3、改变开环增益或时间常数时对系统动态性能有何影响?实验三系统的校正结合报告重点预习: 比例、积分、微分各环节对系统瞬态性能指标的影响。
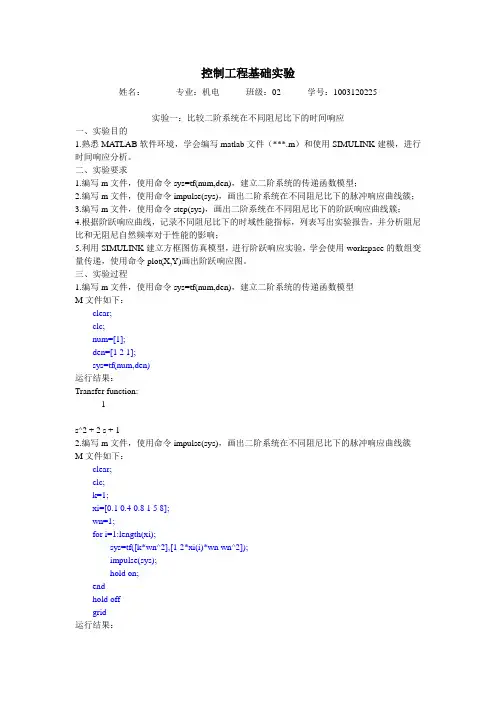
控制工程基础实验姓名:专业:机电班级:02 学号:1003120225实验一:比较二阶系统在不同阻尼比下的时间响应一、实验目的1.熟悉MA TLAB软件环境,学会编写matlab文件(***.m)和使用SIMULINK建模,进行时间响应分析。
二、实验要求1.编写m文件,使用命令sys=tf(num,den),建立二阶系统的传递函数模型;2.编写m文件,使用命令impulse(sys),画出二阶系统在不同阻尼比下的脉冲响应曲线簇;3.编写m文件,使用命令step(sys),画出二阶系统在不同阻尼比下的阶跃响应曲线簇;4.根据阶跃响应曲线,记录不同阻尼比下的时域性能指标,列表写出实验报告,并分析阻尼比和无阻尼自然频率对于性能的影响;5.利用SIMULINK建立方框图仿真模型,进行阶跃响应实验,学会使用workspace的数组变量传递,使用命令plot(X,Y)画出阶跃响应图。
三、实验过程1.编写m文件,使用命令sys=tf(num,den),建立二阶系统的传递函数模型M文件如下:clear;clc;num=[1];den=[1 2 1];sys=tf(num,den)运行结果:Transfer function:1-------------s^2 + 2 s + 12.编写m文件,使用命令impulse(sys),画出二阶系统在不同阻尼比下的脉冲响应曲线簇M文件如下:clear;clc;k=1;xi=[0.1 0.4 0.8 1 5 8];wn=1;for i=1:length(xi);sys=tf([k*wn^2],[1 2*xi(i)*wn wn^2]);impulse(sys);hold on;endhold offgrid运行结果:3.编写m文件,使用命令step(sys),画出二阶系统在不同阻尼比下的阶跃响应曲线簇M文件如下:clear;clc;k=1;xi=[0.1 0.4 0.8 1 5 8];wn=1;for i=1:length(xi);sys=tf([k*wn^2],[1 2*xi(i)*wn wn^2]);step(sys);hold on;endhold offgrid运行结果:4.根据阶跃响应曲线,记录不同阻尼比下的时域性能指标,列表写出实验报告,并分析阻尼比和无阻尼自然频率对于性能的影响利用时域响应特性函数function [tr,tp,mp,ts,td]=texing(sys,xi,m,n)求得系统在不同阻尼比xi下阶跃响应的时域特性指标(texing函数见附录)。
控制工程基础实验报告北京工业大学机电学院指导教师:初红艳学号:姓名:一.实验目的本实验中,学生使用MATLAB 语言进行控制系统的分析,可以达到以下目的: (1)通过MATLAB 的分析,掌握控制系统的时域瞬态响应、频率特性,根据时域性能指标、频域性能指标评价控制系统的性能,根据系统频率特性进行稳定性分析,了解对系统进行校正的方法,从而进一步巩固、加深对课堂内容的掌握,加强对控制工程基础知识的掌握。
(2)熟悉MATLAB 的控制系统图形输入与仿真工具SIMULINK ,能够对一些框图进行仿真或线性分析,使一个复杂系统的输入变得相当容易且直观。
(3)通过本实验,使学生掌握进行控制系统计算机辅助分析的方法,学会利用MATLAB 语言进行复杂的实际系统的分析、校正与设计,具备解决工程实际问题的能力。
二.实验内容控制系统方块图如图1所式。
这是一个电压—转角位置随动系统,系统的功能是用电压量去控制一个设备的转角,给定值大,输出转角也就成比例地增大。
图1 系统方块图 图中,)(1s G 为前置放大及校正网络传递函数K 2为功率放大器放大倍数,102=K K 3为电动机传递系数,s V rad K ⋅=/83.23 T M 为电动机机电时间常数,s T M 1.0= T a 为电动机电磁时间常数,ms T a 4= K c 为测速传递系数,rad s V K c /15.1⋅=β 为测速反馈分压系数,1=βK a 为主反馈电位计传递系数,rad V K a /7.4= U i 为输入电压U b 为反馈电压 U i 2为速度环输入电压 U c 为测速机电压 U D 为电动机电压n 为电动机转速取1=β三、实验报告1.对于二阶系统:1)(23++=s s G Ts T T KMaM,a M MaM T T T T T 21n ==ζω其阶跃响应和单位脉冲响应分别如图1-1、1-2所示:MATLAB 语言为: >>num=[2.83]num =2.8300>> den=[0.0004,0.1,1]den =0.0004 0.1000 1.0000>> sys=tf(num,den) sys =2.83 ---------------------- 0.0004 s^2 + 0.1 s + 1Continuous -time transfer function.>> step(sys)>> impulse(sys)图1-1图1-2此时阻尼比为2.5,由其阶跃响应可知其稳态值为2.83,为过阻尼状态,瞬态响应指标如上图所示;在无阻尼自振角频率不变时,通过简单计算得出如下的结论:M a M n T T T 25===ζω,0004.0,50调整TM=0.01,Ta=0.04,使得系统处于欠阻尼状态,0.25=ξ,其阶跃响应与单位脉冲响应1-3、1-4;MATLAB 语言如下:>>num=[2.83]num =2.8300>> den=[0.0004,0.01,1]den =0.0004 0.0100 1.0000>> sys=tf(num,den) sys =2.83 -----------------------0.0004 s^2 + 0.01 s + 1Continuous -time transfer function.>> step(sys) >> impulse(sys)其瞬态响应指标在下图中标出;图1-3图1-4调整TM=0.04,Ta=0.01,使得系统处于临界阻尼状态,其阶跃响应与单位脉冲响应如图1-5、1-6所示;MATLAB语言如下:>>num=[2.83]num =2.8300>> den=[0.0004,0.04,1]den =0.0004 0.0400 1.0000>> sys=tf(num,den)sys =2.83-----------------------0.0004 s^2 + 0.04 s + 1Continuous-time transfer function.>> step(sys)>> impulse(sys图1-5图1-6由以上当TM=0.1,Ta=0.0004,系统处于过阻尼状态,其阶跃响应与单位脉冲响应见图1-1、1-2所示:分析:由以上响应曲线和响应指标可知,过阻尼与临界阻尼无超调、无振荡,而欠阻尼有超调和振荡,过阻尼达到平衡状态所需的时间比临界阻尼和过阻尼都要长。
Hefei University of Technology《控制工程基础》实验报告学院机械与汽车工程学院姓名学号专业班级机械设计制造及其自动化13-7班2015年12月15日自动控制原理实验• 1、线性系统的时域分析• 1.1典型环节的模拟研究一、实验要求1、掌握各典型环节模拟电路的构成方法、传递函数表达式及输出时域函数表达式。
2、观察和分析各典型环节的阶跃响应曲线,了解各项电路参数对典型环节动态特性的影响。
二、实验原理(典型环节的方块图及传递函数)三、实验内容及步骤在实验中欲观测实验结果时,可用普通示波器,也可选用本实验机配套的虚拟示波器。
如果选用虚拟示波器,只要运行LABACT 程序,选择自动控制菜单下的线性系统的时域分析下的典型环节的模拟研究实验项目,再选择开始实验,就会弹出虚拟示波器的界面,点击开始即可使用本实验机配套的虚拟示波器(B3)单元的CH1测孔测量波形。
具体用法参见用户手册中的示波器部分。
1) 观察比例环节的阶跃响应曲线典型比例环节模拟电路如图3-1-1所示。
该环节在A1单元中分别选取反馈电阻R1=100K 、200K 来改变比例参数。
图3-1-1 典型比例环节模拟电路实验步骤: 注:“SST ”不能用“短路套”短接!(1)将信号发生器(B1)中的阶跃输出0/+5V 作为系统的信号输入(Ui ) (2)安置短路套、联线,构造模拟电路:(a(b(3)虚拟示波器(B3)的联接:示波器输入端CH1接到A6单元信号输出端OUT (Uo )。
注:CH1选“X1”档。
时间量程选“x4”档。
(4)运行、观察、记录:按下信号发生器(B1)阶跃信号按钮时(0→+5V 阶跃),用示波器观测A6输出端(Uo )的实际响应曲线Uo (t ),且将结果记下。
改变比例参数(改变运算模拟单元A1的反馈电阻R1),重新观测结果,其实际阶跃响应曲线见表3-1-1。
2) 观察惯性环节的阶跃响应曲线典型惯性环节模拟电路如图3-1-2所示。
控制工程基础实验报告实验三 自动控制系统的校正班级:机械10-5班 姓名:臧孟 学号:2010054130一、实验目的1、掌握串联校正装置设计的一般方法。
2、设计一个有源串联超前校正装置,使之满足实验系统动、静态性能的要求。
二、实验内容1、未校正系统的方块图如图3—1所示,设计相应的模拟电路图,参见图3—2。
图3—1 未校正系统的方块图图3—2 未校正系统的模拟电路图ωn=6.32 Mp=60%2、由闭环传递函数Kv=20 1/s3、用示波器观测并记录未校正系统在阶跃信号作用下的动态性能指标Mp 、t s 、t p4、根据系统动态性能的要求,设计一个超前校正装置,其传递函数为:Gc(s)=1S 05.01S 5.0++ 其模拟电路图为3—3所示。
要求校正后系统Kv=20,Mp=0.25,t s ≤1s ,图3—3 校正装置电路校正后系统的方块图为图3—4所示由图可知,该系统的开环传递函数为G(S)=)20S (S 400)1S 05.0(S 20+=+ 与二阶系统标准形式的开环传递函数相比较,得ωn=400=20 2ξωn=20 ξ=0.5 Mp=e -215ξ-π=0.163<0.25图3—5 校正后系统的模拟电路图三、实验步骤1、按照图3—2接线,并核对图中各环节的参数是否完全满足图3—1所示系统的要求。
2、加入阶跃输入电压,用示波器观察并记录系统输出响应曲线及其性能指标:超调量Mp 和调节时间t s 。
3、按图3—5的要求接入校正装置。
在输入端引入阶跃控制电压,并用示波器观察和记录校正后系统的超调量Mp 和调节时间t s ,以检验系统是否完全满足预期的设计要求。
4、具体参数及响应曲线请参照表3-1。
四、实验思考题1、阶跃输入信号为什么不能取得太大?答:因为线性系统都有自己的线性范围,如果阶跃信号输入太大,会导致输出失真。
2、为什么图3—3所示的校正装置是超前校正装置?答:因为校正装置是一个微分环节,微分环节可以超前校正。
《控制工程基础》实训报告[合集五篇]第一篇:《控制工程基础》实训报告《控制工程基础》实训报告实训地点:实训时间:所在院系:电子信息学院自动化系专业年级:学生姓名:学生学号:指导教师:A2-310 2013年12月2日至12月10日12电气3班实验一典型环节的模拟研究一:实验目的1、掌握典型环节仿真结构图的建立方法;2、通过观察典型环节在单位阶跃信号作用下的动态特性,熟悉各种典型环节的响应曲线。
3、定性了解各参数变化对典型环节动态特性的影响。
4、初步了解MATLAB中SIMULINK 的使用方法。
二:实验步骤1.建立各典型环节(比例、积分、微分、惯性、振荡)的仿真模型。
进入MATLAB编程环境,在File菜单的New子命令下,新建一个模块文件(*.model)并保存;进入simulink仿真环境,在模块库中找到所需的模块,用鼠标按住该模块并拖至模块文件中,然后再放开鼠标;根据信号流向,用信号线连接各模块。
2.根据实验要求,对每一个模块,选取合适的模块参数;3.在模块文件的simulation菜单下,单击Simulation/paramater子命令,将仿真时间(Stop Time)设置为10秒;4.在模块文件的simulation菜单下,单击Start子命令,开始仿真过程。
5.利用PrintScreen命令,将仿真模型和仿真图形拷贝到WORD文档中。
三:实验内容①惯性环节(仿真结构图、阶跃响应曲线、分析结果);②积分环节(仿真结构图、阶跃响应曲线、分析结果);③比例环节(仿真结构图、阶跃响应曲线、分析结果);④振荡环节(仿真结构图、阶跃响应曲线、分析结果);⑤实际微分(仿真结构图、阶跃响应曲线、分析结果); 1.比例环节连接系统, 如图所示: 22.参数设置: 用鼠标双击阶跃信号输入模块,设置信号的初值和终值,采样时间sample time 和阶跃时间step time3.在simulation/paramater中将仿真时间(Stop Time)设置为10秒,4.仿真:simulation/start,仿真结果如图1-1所示改变Kd,观察仿真结果如下图所示(2)积分环节——放大倍数K不同时的波形(3):微分环节——改变Td、Kd,观察仿真结果(4):惯性环节--改变其放大倍数K及时间常数T 5(5)振荡环节——改变ξω的值的波形四:实训小结积分环节的传递函数为G=1/Ts(T为积分时间常数),惯性环节的传递函数为G=1/(Ts+1)(T为惯性环节时间常数)。
控制系统的仿真数学模型系别:机电工程系班级:1301班专业:机械设计制造及其自动化姓名:学号:201309011指导教师:刘春艳一、实验目的由系统的结构方框图得到控制系统模型,其传递函数方框图,用SIMULINK 模型结构图化简控制系统模型,分析系统的阶跃响应,并绘制响应曲线。
二、上机内容1、 Matlab 基础2、 Matlab 中系统建模3、 Matlab 分析系统的动态特性三、实验平台Windows 98或2000或XP Matlab 6.1以上版本四、操作过程、源程序和计算结果:3.15二阶系统的闭环传递函数为()2222nn n s s s G ωξωω++=式中二阶系统固有频率n ω=10 rad/s,试求该系统在欠阻尼、临界阻尼、过阻尼、零阻尼及负阻尼状态下的单位阶跃响应。
(1)欠阻尼,当取二阶系统阻尼分别为ξ=0.2、0.4、0.6、0.8时,仿真模型如下图所示(2) 临界阻尼、过阻尼、零阻尼及负阻尼状态下的单位阶跃响应,当取二阶系统阻尼分别为 =1.0、1.5、0.0、-0.2时,仿真模型如下图所示例题3.16 某单位反馈控制系统框图如下图所示。
试分析开环放大系数K对该系统稳定性的影响。
3-18 对于典型二阶系统,()2222nn n s s s G ωξωω++= ,要求: 1.当固有振荡频率=n ω6rad/s ,阻尼比分别为0.1,0.2, ------0.9,1.0,2.0时系统的单位阶跃响应曲线和单位脉冲曲线;2.当阻尼比7.0=ξ时,固有频率分别为2,4,6,8,10,12rad/s 时的单位阶跃响应曲线和单位脉冲响应曲线。
(1)t=[0:0.1:10];num=[36];den1=[1 1.2 36];sys1=tf(num,den1);den2=[1 2.4 36];sys2=tf(num,den2);den3=[1 3.6 36]; sys3=tf(num,den3);den4=[1 4.8 36];sys4=tf(num,den4);den5=[1 6 36];sys5=tf(num,den5);den6=[1 7.2 36];sys6=tf(num,den6);den7=[1 8.4 36];sys7=tf(num,den7);den8=[1 9.6 36];sys8=tf(num,den8);den9=[1 10.8 36];sys9=tf(num,den9);den10=[1 12 36];sys10=tf(num,den10);den11=[1 24 36];sys11=tf(num,den11);step(sys1,sys2, sys3, sys4, sys5, sys6, sys7, sys8, sys9, sys10, sys11, t);grid on;t=[0:0.1:6];num=[36];den1=[1 1.2 36]; sys1=tf(num,den1); den2=[1 2.4 36]; sys2=tf(num,den2); den3=[1 3.6 36]; sys3=tf(num,den3); den4=[1 4.8 36]; sys4=tf(num,den4); den5=[1 6 36];sys5=tf(num,den5); den6=[1 7.2 36]; sys6=tf(num,den6); den7=[1 8.4 36];sys7=tf(num,den7);den8=[1 9.6 36];sys8=tf(num,den8);den9=[1 10.8 36];sys9=tf(num,den9);den10=[1 12 36];sys10=tf(num,den10);den11=[1 24 36];sys11=tf(num,den11);impulse(sys1,sys2, sys3, sys4, sys5, sys6, sys7, sys8, sys9, sys10, sys11, t);grid on;(2)t=[0:0.1:5];den1=[1 2.84];sys1=tf([4],den1);den2=[1 5.616];sys2=tf([16],den2);den3=[1 8.436];sys3=tf([36],den3);den4=[1 11.264];sys4=tf([64],den4);den5=[1 14100];sys5=tf([100],den5);den6=[1 16.8144];sys6=tf([144],den6);step(sys1,sys2, sys3, sys4, sys5, sys6, t); grid on;t=[0:0.1:6];den1=[1 2.84];sys1=tf([4],den1);den2=[1 5.616];sys2=tf([16],den2);den3=[1 8.436];sys3=tf([36],den3);den4=[1 11.264];sys4=tf([64],den4);den5=[1 14100];sys5=tf([100],den5);den6=[1 16.8144];sys6=tf([144],den6);impulse(sys1,sys2, sys3, sys4, sys5, sys6, t); grid on;。
《控制工程基础》课程实验报告学院:机械与车辆学院专业班级:姓名:学号:指导教师:时间:实验一MATLAB应用基础实验二控制系统的数学模型建立实验三控制系统的分析与校正中国·珠海实验一MATLAB在控制系统中的应用一、实验目的1、掌握Matlab软件使用的基本方法2、熟悉Matlab的数据表示、基本运算3、熟悉Matlab绘图命令及基本绘图控制二、实验内容:1、帮助命令使用help命令,查找函数名的使用方法。
如sqrt(开方)函数,roots,bode,step,tf函数等2、矩阵运算(1)矩阵的乘法A=[1 2 3;3 4 5 ]; B=[7 3 6;4 3 8]A.*Bans =7 6 1812 12 40(2)矩阵的转置及共轭转置A=[3-i,8+i,2;4,5*i,5+i]A =ans =3.0000 - 1.0000i 8.0000 + 1.0000i 2.00004.0000 0 +5.0000i 5.0000 + 1.0000i>> A'ans =3.0000 + 1.0000i4.00008.0000 - 1.0000i 0 - 5.0000i2.0000 5.0000 - 1.0000i(4)使用冒号选出指定元素已知:A=[4 2 3 4;7 5 6 7;7 8 9 2];求A中第4列前2个元素;A中所有列第1,2行的元素;方括号[]用magic函数生成一个5阶魔术矩阵,删除该矩阵的第五列解:>> A=[4 2 3 4;7 5 6 7;7 8 9 2]A =4 2 3 47 5 6 77 8 9 2A(1:2,4)ans =47A(1:2,:)ans =4 2 3 47 5 6 7M=magic(5)M =17 24 1 8 1523 5 7 14 164 6 13 20 2210 12 19 21 311 18 25 2 9>> sum(M)ans =65 65 65 65 65>> M(:,1:4)ans =17 24 1 823 5 7 144 6 13 2010 12 19 2111 18 25 23、多项式(1)求多项式p (x ) = x ^4−3x^2 +x+1的根解:>> p=[1 0 -2 -4]p =1 0 -2 -4>> roots(p)ans =2.0000-1.0000 + 1.0000i-1.0000 - 1.0000i4.已知A=[0.2 7 3 1.9;5 1.7 5 6;4 9 0 9;3 2 7 3] ,求矩阵A的特征多项式;求特征多项式中未知数为20时的值;把矩阵A作为未知数代入到多项式中;解:>> A=[0.2 7 3 1.9;5 1.7 5 6;4 9 0 9;3 2 7 3]A =0.2000 7.0000 3.0000 1.90005.0000 1.7000 5.00006.00004.0000 9.0000 0 9.00003.0000 2.0000 7.0000 3.0000 >> poly(A)ans =1.0000 -4.9000 -166.6600 -586.0300 91.1200>> polyval(ans,10)ans =-1.7335e+0044、基本绘图命令(1)绘制余弦曲线y=sin(t)’,t∈[0,2π]解:>> t=0:pi/100:2*pi;>> y=sin(t)’>> plot(t,y)在同一坐标系中绘制余弦曲线y=cos(t-1.5)和正弦曲线y=sin(t-0.5),t∈[0,2π]解:t=0:pi/100:2*pi;>> y1=sin(t-1.5);y2=cos(t-0.5);>> plot(t,y1,t,y2)实验二控制系统的数学模型建立一、实验目的1、掌握建立控制系统模型的函数及方法;2、掌握控制系统模型间的转换方法及相关函数;3、掌握典型系统模型的生成方法。
控制工程基础[英]实验
实验一.典型环节的模拟研究:
已知一个小车、倒单摆系统非线性系统方程为:
( 2.92)0.008x x u =-+
20.004sin 36cos n n x θωθωθθ=-+-
其中假设 (0)0;(0)0.2x x ==,
(0)0;(0); 6.781,n θθπω===
(1)要求绘出系统[0,10]t ∈的状态响应曲线
(2)并将上述系统在0θ≈的条件下线性化,并要求绘出线性化后系统
[0,10]t ∈的状态响应曲线,并与非线性系统状态响应曲线相比较。
(1)下面利用Simulink 对该系统进行仿真如下图所示。
图1.倒单摆系统仿真图
在图中已经对主要信号进行了标注下面给出每个未标注信号后加入放大器的增益:
008.092.2=
阶跃K 008
.01
-=一阶微分x K 98.45=二阶微分θK
通过示波器Scope 和Scope1观察x(t)和θ(t)的波形图如下所示。
图2.x(t)波形图3.θ(t)波形(2)将上述系统在0
θ≈的条件下线性化,则方程组改写成如下形式:
( 2.92)0.008
x x u
=-+
2
0.004sin36
n n x
θωθωθ
=-+-
在Simulink中对系统仿真如下所示。
图4.线性化后仿真系统
通过示波器模块可以观察输出信号,图形如下图所示。
图5.x(t)输出波形
图6.θ(t )输出波形
实验二.典型系统时域响应动、静态性能和稳定性研究; 已知系统的开环传递函数为
2()11G s s s =
++
(1)利用已知的知识判断该开环系统的稳定性(系统的特征方程根、系统零极点表示法)。
(2)判别系统在单位负反馈下的稳定性,并求出闭环系统在[0,10]t ∈内的脉冲响应和单位阶跃响应,分别绘制出相应响应曲线。
(1)该系统的特征方程的根、零极点表示的求解代码如下:
输出结果如下图所示。
图7.特征方程求根结果
图8.零极点分布图
从图中可以看出两个极点在虚轴上,所以该系统处于临界稳定状
态。
(2)求解阶跃响应和脉冲响应的程序代码如下:
该系统的脉冲响应和阶跃响应图如下。
图9.系统脉冲响应和阶跃响应图
实验三.控制系统的频率特性研究; 针对如右图所示系统,已知被控系统G(s)的传递函数为:
2()1G s s s =
+
(1)要求画出该闭环系统的根轨迹曲线图(随K 变化)
(2)求出该闭环系统的传递函数T(s),并画出当K=2该闭环系统的Bode 图,并分别在图中求出闭环系统的相角裕度与幅值裕度。
(1)由图可以看出系统的特征方程为
s
s K
s KG s ++
==∆21)()( 下面画出随K 变化的闭环系统的根轨迹曲线图,代码如下:
运行程序可以得到根轨迹如下图所示。
图10.随K 变话系统根轨迹图
系统的传递函数为
2
2
)(1)()(2++=+=
s s s KG s KG s T
下面给出计算代码如下:
程序的输出结果和波特图如下所示。
图11.系统求解传递函数输出
从波特图上的信息可以看出:
当sec /73.1rad =ω时,系统有0)(log 20=ωj G ,相角裕度为︒=60..M P 当+∞→ω时,系统有相角为180°,增益裕度为∞=..M G
图12.闭环系统波特图
实验四.线性系统校正.
针对如左图所示系统,已知系
统被控系统G(s)的传递函数为:
2()10510G s s s =
++
(1)当比例控制器增益K=1时,在Matlab/Simulink 中搭建仿真系统,当
输入为阶跃函数时,用示波器Scope 观测系统的输出,绘出响应曲线。
并将对象输出y(t)与时钟输出输入Workspace 中,编程求出系统的响应时间、调节时间及超调量,并将计算结果与根据理论公式计算值相比较。
(2)调节控制器增益,使超调量%32%
e<,给出
σ<,且稳态误差0.2
ss
此时K值的范围。
(3)如果想使稳态误差0
e=,应考虑将上述的比例控制器该为何种控
ss
制器,即选用比例积分控制器,或比例微分控制器,或比例、积分与微分控制器,试从超前/滞后校正理论论证,并绘出对应的响应曲线。
(1)K=1时在Simulink中搭建的仿真系统如下图所示。
图13.K=1时仿真系统
利用示波器观察输出结果可以看到如下波形
图14.K=1时仿真系统输出波形
下面将输出结果导出到Workspace中,利用To Workspace模块替换Scope将系统输出导入为矩阵y如下图所示,并编程计算相关的参数。
图14.导出系统输出数据
程序的输出结果如下:
系统超调量为pos =0.1188 系统响应时间为tr = 1.6211 系统调节时间为ts = 2.2319 系统稳态误差为ess = 0.5000
通过理论计算算出系统参数如下:
系统超调量为pos =0.1202 系统响应时间为tr = 1.801 系统调节时间为ts = 0.584
(2)调节系统放大器增益,利用上题程序计算参数。
①当K=4时,结果如下:
pos =0.3045 tr =1.3249 ts =2.5070 ess =0.2000 可以看出此时稳态误差正好在0.2,超调量满足要求。
②当K=4.386时,结果如下:
pos =0.3200 tr =1.3125 ts =2.4251 ess =0.1857 可以看出此时超调量正好在32%,稳态误差满足要求。
③当K>4.386或者K<4时都不满足要求
所以所求K的范围为4<K<4.386
(3)
选用比例微分积分控制器,设定其参数为:P=6 I=1 D=0.3 在放大器后增加PID控制器如下图所示。
图15.增加PID控制器后的系统
通过示波器观察到系统的输出波形如下。
图16.增加PID控制器后的系统输出波形
从波形图可以看出稳定后系统输出为1,符合稳态误差为0的要求。