实验十 系统能控性与能观性分析
- 格式:doc
- 大小:76.00 KB
- 文档页数:3
紫金学院计算机系实验报告现代控制理论基础实验报告专业:年级:姓名:学号:提交日期:实验一 系统能控性与能观性分析1、实验目的:1.通过本实验加深对系统状态的能控性和能观性的理解;2.验证实验结果所得系统能控能观的条件与由它们的判据求得的结果完全一致。
2、实验内容:1.线性系统能控性实验;2. 线性系统能观性实验。
3、实验原理:系统的能控性是指输入信号u 对各状态变量x 的控制能力。
如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间内把系统所有的状态变量转移到状态空间的坐标原点。
则称系统是能控的。
系统的能观性是指由系统的输出量确定系统所有初始状态的能力。
如果在有限的时间内,根据系统的输出能唯一地确定系统的初始状态,则称系统能观。
对于图10-1所示的电路系统,设i L 和u c 分别为系统的两个状态变量,如果电桥中4321R R R R ≠,则输入电压u 能控制i L 和u c 状态变量的变化,此时,状态是能控的;状态变量i L 与u c 有耦合关系,输出u c 中含有i L 的信息,因此对u c 的检测能确定i L 。
即系统能观的。
反之,当4321R R =R R 时,电桥中的c 点和d 点的电位始终相等, u c 不受输入u 的控制,u 只能改变i L 的大小,故系统不能控;由于输出u c 和状态变量i L 没有耦合关系,故u c 的检测不能确定i L ,即系统不能观。
1.1 当4321R RR R ≠时u L u i R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L u i C L C L ⎪⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛⨯⎪⎪⎪⎪⎪⎭⎫+++-+-+-⎝⎛+-+-+++-=⎪⎪⎭⎫ ⎝⎛01)11(1)(1)(1)(143214343212143421243432121 (10-1)y=u c =[01]⎪⎪⎪⎭⎫⎝⎛c L u i (10-2)由上式可简写为bu Ax x+= cx y =式中⎪⎪⎭⎫ ⎝⎛=C L u i x ⎪⎪⎪⎪⎪⎭⎫+++-+-+-⎝⎛+-+-+++-=)11(1)(1)(1)(143214343212143421243432121R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L A⎪⎪⎪⎭⎫⎝⎛=01L b 1] [0=c由系统能控能观性判据得][Ab brank =2 2=⎥⎦⎤⎢⎣⎡cA c rank故系统既能控又能观。
实 验 报 告课程 自动控制原理 实验日期 12 月26 日 专业班级 姓名 学号实验名称 系统的能控性与能观性分析及状态反馈极点配置 评分批阅教师签字一、实验目的加深理解能观测性、能控性、稳定性、最小实现等观念,掌握状态反馈极点配置方法,掌握如何使用MATLAB 进行以下分析和实现。
1、系统的能观测性、能控性分析;2、系统的最小实现;3、进行状态反馈系统的极点配置;4、研究不同配置对系统动态特性的影响。
二、实验内容1.能控性、能观测性及系统实现(a )了解以下命令的功能;自选对象模型,进行运算,并写出结果。
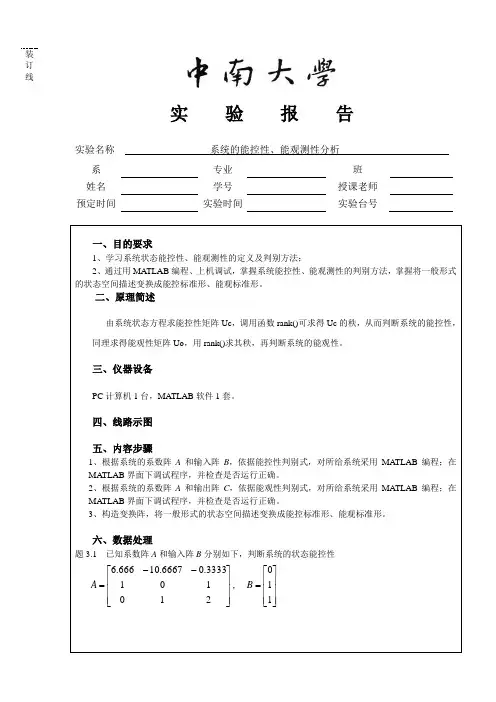
gram, ctrb, obsv, lyap, ctrbf, obsvf, mineral ; (b )已知连续系统的传递函数模型,182710)(23++++=s s s as s G ,当a 分别取-1,0,1时,判别系统的能控性与能观测性;(c )已知系统矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=2101013333.06667.10666.6A ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=110B ,[]201=C ,判别系统的能控性与能观测性;(d )求系统1827101)(23++++=s s s s s G 的最小实现。
2.实验内容原系统如图1-2所示。
图中,X 1和X 2是可以测量的状态变量。
图1-2 系统结构图试设计状态反馈矩阵,使系统加入状态反馈后其动态性能指标满足给定的要求:(1) 已知:K=10,T=1秒,要求加入状态反馈后系统的动态性能指标为:σ%≤20%,ts≤1秒。
(2) 已知:K=1,T=0.05秒,要求加入状态反馈后系统的动态性能指标为:σ%≤5%,ts≤0.5秒。
状态反馈后的系统,如图1-3所示:图1-3 状态反馈后系统结构图分别观测状态反馈前后两个系统的阶跃响应曲线,并检验系统的动态性能指标是否满足设计要求。
三、实验环境 1、计算机1台;2、MATLAB6.5软件1套。
四、实验原理(或程序框图)及步骤 1、系统能控性、能观性分析设系统的状态空间表达式如下:p m n R y R u R x Du Cx y Bu Ax x∈∈∈⎩⎨⎧+=+=&(1-1)其中A 为n ×n 维状态矩阵;B 为n ×m 维输入矩阵;C 为p ×n 维输出矩阵;D 为p ×m 维传递矩阵,一般情况下为0。
第三章 能控性与能观测性——线性系统的结构分析前一章我们讨论了线性系统的定量分析问题,重点是研究系统对确定性的输入u(t)和初始状态x0的精确响应。
本章把问题转向对线性系统的定性分析方面,即介绍线性动态系统的两个重要概念:能控性与能观测性。
这两个概念是卡尔曼(kalman)在1960年首先提出来的,是近代控制理论的基础性概念。
这两个概念简单地说就是:能控性反应了控制作用u(t)支配系统状态向量x(t)的能力,回答了u(t)能否使x(t)作任意转移的问题;能观测性反应系统输出y(t)反映系统状态向量x(t)的能力,回答了能否通过y(t)的量测确定x(t)的问题。
为什么在经典控制理论中,不涉及能控性和能观测性的问题。
因为在经典控制理论中,研究的是SISO的线性定常系统,研究的方法是使用传递函数,且只涉及到系统的输入和输出。
系统的输出都是可以用仪器来量测的,系统的输出量本身就是被控制量,总可以按一定的要求进行控制。
这就是说系统是能控的,也是能观测的。
而现代控制理论 u(t)→x(t)→y(t) (概念)具体内容:(1)定义(2)判别准则(3)结构变换当给定一个系统是完全能控和能观测时,就可以进一步对它进行分析与设计使其达到符合要求的控制系统,一般系统Σ(A,B,C),其结构是不明确,对分析和设计系统极不方便A、化一般表示为能控标准型和能观测标准型B、若不是完全能控和能观测系统,进行结构变换和分解(4)实现问题3.1 线性连续系统的能控性与能观测性10K例:RC 电路选两电容的电压为状态变量x 1和x 2,可以导出系统的状态方程(推导!!)。
u x x x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡−−=⎥⎦⎤⎢⎣⎡1121122121&& 根据前一章介绍可以求其状态转移矩阵)(t φ,当初态x (0)=0时,其状态响应为ττττd u e e t x t x t x t t t )()()()(0)()(21∫⎥⎦⎤⎢⎣⎡==⎥⎦⎤⎢⎣⎡−−−−可以看到,无论系统施加何种控制作用u (t ),x 1(t )=x 2(t ),也就是说,无法将状态转移到)()(21t x t x ≠的任意点,因此系统是不完全能控的。
系统的能控性能观测性稳定性分析1. 能控性(Controllability)能控性是指系统输出能否通过适当的输入方式对系统进行控制。
如果一个系统是能控的,意味着通过控制器的输入信号,我们能够将系统的输出发展到我们所期望的状态。
对于一个线性时不变(LTI)系统,能控性可以通过判断其控制矩阵的秩来确定。
控制矩阵(也称为控制可达矩阵)是由系统的状态方程和控制器的输入方程组成的。
如果控制矩阵的秩等于系统的状态数量,则系统是能控的;否则,系统是无法被完全控制的。
能控性的分析可以帮助我们选择合适的控制策略和控制器设计。
当系统的能控性差时,我们可能需要通过增加或修改系统的状态变量或控制器的输入方式来提高系统的能控性。
2. 能观测性(Observability)能观测性是指系统的内部状态能否通过系统的输出信号来判断。
一个能观测的系统意味着我们可以通过观测系统的输出来估计系统的状态。
对于一个线性时不变系统,能观测性可以通过判断其观测矩阵的秩来确定。
观测矩阵(也称为观测可达矩阵)是由系统的状态方程和输出方程组成的。
如果观测矩阵的秩等于系统的状态数量,则系统是能观测的;否则,系统的一些状态是无法通过输出来观测到的。
能观测性的分析可以帮助我们选择合适的观测器设计,以实现对系统状态的估计。
当系统的能观测性差时,我们可能需要增加或改变系统的输出方程来提高系统的能观测性。
3. 稳定性(Stability)稳定性是指系统在受到扰动后是否会逐渐恢复到原来的状态。
对于线性时不变系统,稳定性可以分为几种类型:零状态稳定、有限状态稳定和无限状态稳定。
零状态稳定(Zero-state stability)是指当系统受到初始条件扰动时,输出信号会在有限时间内收敛到零。
有限状态稳定(Finite state stability)是指当系统受到初始条件扰动时,输出信号会在有限时间内收敛到一些有限值。
无限状态稳定(Infinite state stability)是指当系统受到初始条件扰动时,输出信号会在无限时间内收敛到一些有限值。
紫金学院计算机系实验报告现代控制理论基础实验报告专业:年级:姓名:学号:提交日期:实验一 系统能控性与能观性分析1、实验目的:1.通过本实验加深对系统状态的能控性和能观性的理解;2.验证实验结果所得系统能控能观的条件与由它们的判据求得的结果完全一致。
2、实验内容:1.线性系统能控性实验;2. 线性系统能观性实验。
3、实验原理:系统的能控性是指输入信号u 对各状态变量x 的控制能力。
如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间内把系统所有的状态变量转移到状态空间的坐标原点。
则称系统是能控的。
系统的能观性是指由系统的输出量确定系统所有初始状态的能力。
如果在有限的时间内,根据系统的输出能唯一地确定系统的初始状态,则称系统能观。
对于图10-1所示的电路系统,设i L 和u c 分别为系统的两个状态变量,如果电桥中4321R R R R ≠,则输入电压u 能控制i L 和u c 状态变量的变化,此时,状态是能控的;状态变量i L 与u c 有耦合关系,输出u c 中含有i L 的信息,因此对u c 的检测能确定i L 。
即系统能观的。
反之,当4321R R =R R 时,电桥中的c 点和d 点的电位始终相等, u c 不受输入u 的控制,u 只能改变i L 的大小,故系统不能控;由于输出u c 和状态变量i L 没有耦合关系,故u c 的检测不能确定i L ,即系统不能观。
1.1 当4321R RR R ≠时u L u i R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L u i C L C L ⎪⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛⨯⎪⎪⎪⎪⎪⎭⎫+++-+-+-⎝⎛+-+-+++-=⎪⎪⎭⎫ ⎝⎛01)11(1)(1)(1)(143214343212143421243432121 (10-1)y=u c =[01]⎪⎪⎪⎭⎫⎝⎛c L u i (10-2)由上式可简写为bu Ax x+= cx y =式中⎪⎪⎭⎫ ⎝⎛=C L u i x ⎪⎪⎪⎪⎪⎭⎫+++-+-+-⎝⎛+-+-+++-=)11(1)(1)(1)(143214343212143421243432121R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L A⎪⎪⎪⎭⎫⎝⎛=01L b 1] [0=c由系统能控能观性判据得][Ab brank =2 2=⎥⎦⎤⎢⎣⎡cA c rank故系统既能控又能观。
实验十 系统能控性与能观性分析
一、实验目的
1. 通过本实验加深对系统状态的能控性和能观性的理解;
2. 验证实验结果所得系统能控能观的条件与由它们的判据求得的结果完全一致。
二、实验设备
同实验一。
三、实验内容
1. 线性系统能控性实验;
2. 线性系统能观性实验。
四、实验原理
系统的能控性是指输入信号u 对各状态变量x 的控制能力。
如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间内把系统所有的状态变量转移到状态空间的坐标原点。
则称系统是能控的。
系统的能观性是指由系统的输出量确定系统所有初始状态的能力。
如果在有限的时间内,根据系统的输出能唯一地确定系统的初始状态,则称系统能观。
对于图10-1所示的电路系统,设i L 和u c 分别为系统的两个状态变量,如果电桥中
4
32
1R R R R ≠,则输入电压u 能控制i L 和u c 状态变量的变化,此时,状态是能控的;状态变量
i L 与u c 有耦合关系,输出u c 中含有i L 的信息,因此对u c 的检测能确定i L 。
即系统能观的。
反之,当
4
32
1R R =
R R 时,电桥中的c 点和d 点的电位始终相等, u c 不受输入u 的控制,
u 只能改变i L 的大小,故系统不能控;由于输出u c 和状态变量i L 没有耦合关系,故u c 的检测不能确定i L ,即系统不能观。
1.1 当
4
32
1R R R R ≠时 u L u i R R R R C R R R R R R R R L R R R R R R C
R R R R R R R R L u i C
L
C L ⎪
⎪⎪⎭
⎫
⎝⎛+⎪
⎪⎭⎫ ⎝⎛⨯⎪⎪⎪⎪⎪
⎭⎫+++-+-
+-
⎝
⎛+-
+-
+++-
=⎪⎪⎭⎫ ⎝⎛01)11(1)(
1
)
(
1)(
14321434
3212
14
342
124
3432
121
(10-1)
y=u c =[0
1]
⎪⎪⎪
⎭
⎫ ⎝⎛c L
u i (10-2)
由上式可简写为
bu Ax x
+= cx y = 式中⎪⎪⎭⎫
⎝⎛=C L u i x ⎪⎪⎪⎪
⎪⎭
⎫
+++-
+-+-
⎝
⎛+-+-++
+-=)11(
1)(
1
)(
1)(
1
432
1434
3212
14
342
124
343212
1R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L A
⎪⎪⎪
⎭
⎫ ⎝⎛=01L b 1] [0=c
由系统能控能观性判据得 ][Ab b
rank =2 2=⎥⎦
⎤
⎢
⎣⎡cA c rank 故系统既能控又能观。
1.2 当4
32
1R R =R R 时,式(10-1)变为
u L u i R R R R C R R R R R R R R L u i C
L
C
L ⎪⎪⎪⎭
⎫ ⎝
⎛+⎪⎪⎭
⎫ ⎝⎛⨯⎪⎪⎪⎭
⎫
+++-
⎝⎛+++-=⎪⎪⎭⎫
⎝⎛01
)11(10
)(1
432143432121
(10-3)
y=u c =[0
1]
⎪⎪⎪
⎭
⎫ ⎝⎛c
L u i (10-4)
由系统能控能观性判据得
][Ab b
rank =1<2 1=⎥⎦
⎤
⎢⎣⎡cA c rank <2
故系统既不能控又不能观,若把式(10-3)展开则有
u L
i R R R R R R R
R L i L L 1)(14
343212
1+
++
+-=
(10-5)
c c u R R R R C u
)11(
14
32
1++
+-=
(10-6)
这是两个独立的方程。
第二个方程中的c u 既不受输入u 的控制,也与状态变量L i 没有任何耦合关系,故电路的状态为不能控。
同时输出u c 中不含有i L 的信息,因此对u c 的检测不能确定i L ,即系统不能观。
图10-1系统能控性与能观性实验电路图
五、实验步骤
1. 按图10-1连接实验电路(参考实验台的“系统的能控性和能观性”单元),其中R 1=1K ,R 2=1K ,R 3=1K ,R 4=2K ;
2. 在图10-1的u 输入端输入一个阶跃信号,当阶跃信号的值分别为1V 、2V 时,用上位机软件观测并记录电路中电感和电容器两端电压Uab 、Ucd (u c )的大小;
3. 当R3取(通过短路帽进行切换)2K,阶跃信号的值分别为1V、2V时,用上位机软件观测并记录电路中电感和电容器两端电压Uab 、Ucd (u c)的大小;
4. 当R3取3K,阶跃信号的值分别为1V、2V时,用上位机软件观测并记录电路中电感和电容器两端电压Uab 、Ucd (u c)的大小。
六、实验报告
写出图10-1 电路图的状态空间表达式,并分析系统的能控性和能观性。