切削力测量
- 格式:doc
- 大小:168.00 KB
- 文档页数:11
数控机床切削力的测量与调整方法数控机床作为现代制造业中不可或缺的重要设备,其切削力的测量与调整对于保证加工质量和提高生产效率起着至关重要的作用。
本文将介绍数控机床切削力的测量方法以及在实际应用中的调整方法。
首先,数控机床切削力的测量方法有以下几种常见的技术手段。
一种是间接测量法,通过测量数控机床主轴电机负载电流来间接获得切削力的信息。
这种方法简单可行,但较为粗略,只能提供一个相对的切削力水平。
另一种是应变片测量法,将应变片粘贴在机床的切削部位,通过应变片的应变,可以计算出切削力的大小。
应变片测量法的优点是精度较高,可以提供切削力的具体数值,但需要对应变片进行校准和粘贴,操作稍显繁琐。
还有一种是电容式或压电式力传感器测量法,这是一种较为精确的测量方法。
通过安装在切削部位的力传感器,可以直接测量到切削力的大小和方向,提供准确的切削力信息。
这种方法的优势是测量精度高,但需要专门的力传感器和数据采集设备,成本相对较高。
除了测量切削力的方法,调整切削力也是数控机床加工中的重要一环。
以下介绍几种常见的调整方法。
首先,合理的刀具选择和切削参数设置是调整切削力的基础。
在加工过程中,应根据不同材料的特性和加工要求,选择合适的刀具和切削参数,来控制切削力的大小。
合理的切削参数设置可以减少切削力的大小,并提高加工效率。
其次,刀具的刃磨和更换也是调整切削力的重要手段。
当刀具磨损或破损时,会加大切削力的大小,影响加工质量和机床寿命。
定期对刀具进行刃磨或更换,可以保持刀具的锋利度和稳定性,减小切削力的大小。
此外,适当的切削润滑和冷却也可以影响切削力的大小。
正确选择和使用切削液可以减少切削面的摩擦系数,降低切削力。
冷却系统可以有效排除切屑和降低温度,减少切削力的产生。
合适的切削润滑和冷却措施可以提高加工效率和切削质量。
最后,机床结构和刚度的改进也可以对切削力进行调整。
通过提高机床的刚度,减少机床振动和变形,可以减小切削力的大小,提高加工精度和稳定性。
数控机床铣削刀具的切削力测量方法数控机床在现代制造业中扮演着重要的角色,而切削力测量是对数控机床铣削刀具性能和切削过程进行评估的关键。
切削力的准确测量可以帮助制定和优化刀具和加工参数,提高加工质量和效率。
本文将介绍数控机床铣削刀具的切削力测量方法。
切削力是指刀具在铣削过程中对工件施加的力,它直接影响切削质量和加工效率。
因此,准确测量切削力是评估刀具性能和优化加工过程的重要步骤。
目前,常用的数控机床铣削刀具切削力测量方法主要包括力传感器法、弹道法和求解法。
力传感器法是一种常用且直接的切削力测量方法。
利用力传感器直接测量力的大小和方向,通过把力传感器安装在数控机床的刀架或刀具上,可以测量切削时产生的切向力和轴向力。
切向力是指垂直于切削方向的力,轴向力是指沿切削方向的力。
利用力传感器法可以准确测量刀具在不同工况下的切削力,为刀具的设计和选择提供重要参考。
弹道法是一种间接测量切削力的方法。
它利用切削过程中刀具的变形特点来估计切削力。
首先,在刀具表面上安装一根弹性电阻应变片或纤维光栅传感器,当刀具受到切削力时,弹性电阻应变片或纤维光栅传感器产生变形,并通过测量变形的大小来计算切削力。
弹道法能够测量不同工况下的切削力变化,但精度相对较低,误差较大。
求解方法是一种基于数值计算的切削力测量方法。
它利用工件材料的切削性质和数学模型来计算切削力的大小。
在进行数值计算之前,需提供一些参数,如切削速度、进给量、切削深度等。
通过求解方法可以在不进行实际切削的情况下预测和评估切削力,为刀具设计和加工参数优化提供参考。
在实际应用中,选择合适的切削力测量方法需要综合考虑多种因素,如测量精度、实施难度、设备要求等。
不同方法的选择取决于具体的研究对象和实验条件。
力传感器法是最常用的测量方法之一,其优点是测量精度较高;弹道法适用于对切削过程的总体变化进行研究;求解方法是一种无需实际切削的方法,适用于初步评估切削力。
总之,数控机床铣削刀具的切削力测量是评估刀具性能和优化加工过程的重要步骤。
http54F5.htm车削加工切削力测量实验实验概述切削过程中,会产生一系列物理现象,如切削变形、切削力、切削热与切削温度、刀具磨损等。
对切削加工过程中的切削力、切削温度进行实时测量,是研究切削机理的基本实验手段和主要研究方法。
通过对实测的切削力、进行分析处理,可以推断切削过程中的切削变形、刀具磨损、工件表面质量的变化机理。
在此基础上,可进一步为切削用量优化,提高零件加工精度等提供实验数据支持。
通过本实验可使同学熟悉制造技术工程中的基础实验技术和方法,理解设计手册中的设计参数的来由,在处理实际工程问题中能合理应用经验数据。
实验目的与要求掌握车削用量υc、f、a p,对切削力及变形的影响。
理解切削力测量方法的基本原理、了解所使用的设备和仪器。
理解切削力经验公式推导的基本方法,掌握实验数据处理方法。
实验系统组成实验系统由下列设备仪器组成CA6140车床单元3向切削力传感器单元YD-15动态应变仪单元计算机数据处理仪单元DCI型电子秤或测力环硬质合金外圆车刀单元45号钢试件单元3向切削力传感器结构与工作原理图1 3向切削力传感器示意图3向切削力传感器是一种以电阻式应变片为敏感元件的力传感器。
它具有八角扁环型结构(上下环)的弹性元件。
八角扁环是用整体钢材加工成八角状结构,从而避免接触面间的摩擦和螺钉夹紧的影响。
在八角状弹性元件的适当位置粘贴电阻应变片作为敏感元件。
弹性元件受力变形后,导致电阻应变片变形,引起电阻应变片的电阻值变化,见图1。
其电阻变化率△R/R与应变△L/L有如下的线性关系:△R/R=K0*△L/L=K0*ε式中K o为电阻应变片的应变灵敏系数,一般K o=2.0~2.4;ε—八角状弹性元件的应变。
由于应变片电阻的电阻变化率△R/R是很小的。
故此需外接电阻应变仪,将电阻应变片的微小变化量放大,进而转变成电流(电压)的变化量,形成电信号输出。
在电阻应变仪的输出端连接计算机数据处理仪,对此信号进行实时采样,A/D转换、形成数字数据流输出,存储,形成实验数据的实时记录文档。
实验二 切削力实验一、实验目的和要求1. 了解切削测力仪的工作原理和测力方法和实验系统;2. 掌握背吃刀量sp a 进给量f 和切削速度c v 对切削力的影响规律;3. 通过实验数据的处理,建立切削力的经验公式。
二、实验及标定原理三向切削力的检测原理,是使用三向车削测力传感器检测三向应变,三向应变作为模拟信号,输出到切削力实验仪器内进行高倍率放大,再经A/D 板又一次放大之后,转换为数字量送入计算机的。
测力系统首先应该通过三向电标定,以确定各通道的增益倍数。
然后,再通过机械标定,确定测力传感器某一方向加载力值与三个测力方向响应的线性关系。
经过这两次标定,形成一个稳定的检测系统之后,才能进行切削力实验。
测量切削力的主要工具是测力仪,测力仪的种类很多。
有机械测力仪、油压测力仪和电测力仪。
机械和油压测力仪比较稳定、耐用。
而电测力仪的测量精度和灵敏度较高。
电测力仪根据其使用的传感器不同,又可分为电容式、电感式、压电式、电阻式和电磁式等。
目前电阻式和压电式用得最多。
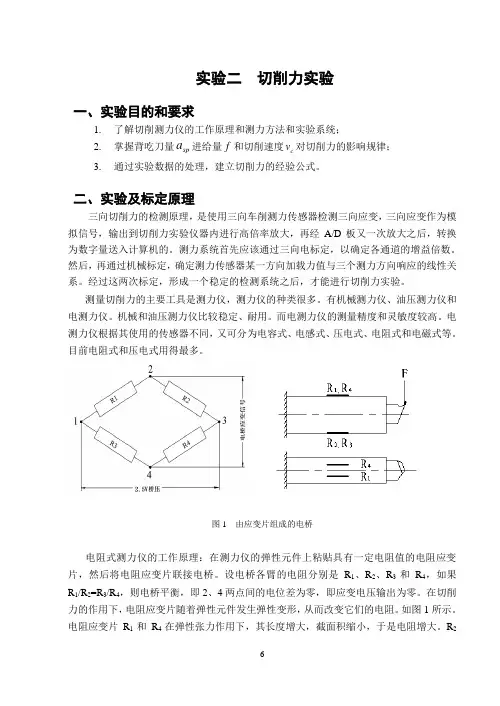
图1 由应变片组成的电桥电阻式测力仪的工作原理:在测力仪的弹性元件上粘贴具有一定电阻值的电阻应变片,然后将电阻应变片联接电桥。
设电桥各臂的电阻分别是R 1、R 2、R 3和R 4,如果R 1/R 2=R 3/R 4,则电桥平衡,即2、4两点间的电位差为零,即应变电压输出为零。
在切削力的作用下,电阻应变片随着弹性元件发生弹性变形,从而改变它们的电阻。
如图1所示。
电阻应变片R 1和R 4在弹性张力作用下,其长度增大,截面积缩小,于是电阻增大。
R 2和R 3在弹性压力作用下,其长度缩短,截面积加大,于是电阻减小,电桥的平衡条件受到破坏。
2、4两点间产生电位差,输出应变电压。
通过高精度线性放大区将输出电压放大,并显示和记录下来。
输出应变电压与切削力的大小成正比,经过标定,可以得到输出应变电压和切削力之间的线性关系曲线(即标定曲线)。
测力时,只要知道输出应变电压,便能从标定曲线上查出切削力的数值。
切削力测量技术现状及其发展趋势分析分析了目前切削力测量技术的现状及存在问题,根据现代切削加工高速、高精度和强力切削的特点,提出了切削力测量技术新的要求及发展趋势。
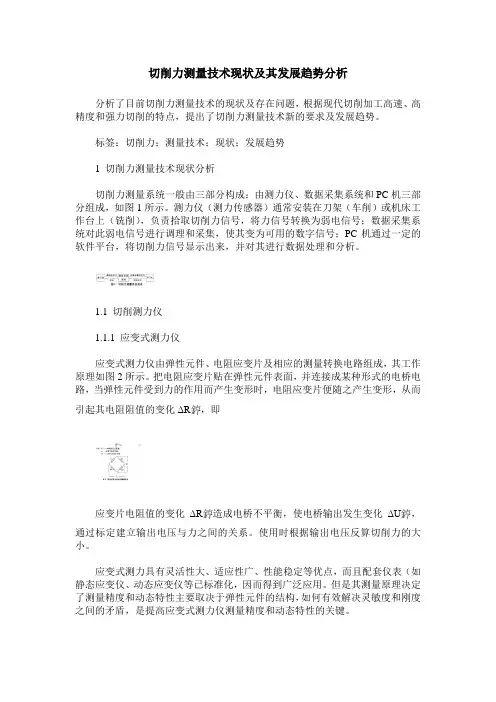
标签:切削力;测量技术;现状;发展趋势1 切削力测量技术现状分析切削力测量系统一般由三部分构成:由测力仪、数据采集系统和PC机三部分组成,如图1所示。
测力仪(测力传感器)通常安装在刀架(车削)或机床工作台上(铣削),负责拾取切削力信号,将力信号转换为弱电信号;数据采集系统对此弱电信号进行调理和采集,使其变为可用的数字信号;PC机通过一定的软件平台,将切削力信号显示出来,并对其进行数据处理和分析。
1.1 切削测力仪1.1.1 应变式测力仪应变式测力仪由弹性元件、电阻应变片及相应的测量转换电路组成,其工作原理如图2所示。
把电阻应变片贴在弹性元件表面,并连接成某种形式的电桥电路,当弹性元件受到力的作用而产生变形时,电阻应变片便随之产生变形,从而引起其电阻阻值的变化ΔR,即应变片电阻值的变化ΔR造成电桥不平衡,使电桥输出发生变化ΔU,通过标定建立输出电压与力之间的关系。
使用时根据输出电压反算切削力的大小。
应变式测力具有灵活性大、适应性广、性能稳定等优点,而且配套仪表(如静态应变仪、动态应变仪等已标准化,因而得到广泛应用。
但是其测量原理决定了测量精度和动态特性主要取决于弹性元件的结构,如何有效解决灵敏度和刚度之间的矛盾,是提高应变式测力仪测量精度和动态特性的关键。
1.1.2 压电式测力仪压电式测力仪是以压电晶体为力传感元件的切削测力仪,当石英晶体在外力作用下发生变形时,在它的某些表面上出现异号极化电荷。
这种没有电场的作用、只是由于应变或应力在晶体内产生电极化的现象称为压电效应。
通过测量产生电荷量即可以达到测量切削力的目的。
从动态测力的观点出发,压电式测力仪是一种比较理想的测力传感器,具有灵敏度高、受力变形小等优点。
然而压电式测力传感器仍然存在一系列缺点:如由于电荷泄漏而不能测试静态力、固有频率的提高受装配接触刚度的限制、维护极不方便、价格昂贵,因此在使用上受到很大的限制。
金属切削中的切削力测量与分析方法综述概述:金属切削是制造业中常见的一种加工方式,切削力是切削过程中的重要参数之一。
准确测量和分析切削力对于优化切削工艺、提高加工质量和提高切削效率具有重要意义。
本文旨在综述金属切削中常用的切削力测量与分析方法,以期为切削加工过程的研究与开发提供参考。
一、切削力的重要性:在金属切削过程中,刀具对工件施加切削力,将金属材料切削成所需形状。
切削力的大小和变化趋势对加工效果、刀具寿命、表面质量等方面均有重要影响,因此切削力的准确测量和分析非常关键。
二、切削力测量方法:1. 力传感器法:力传感器法是最常用的切削力测量方法,通过安装力传感器测量刀具施加在工件上的切削力。
常见的力传感器包括应变片式传感器、压电式传感器和磁电式传感器等。
这些传感器可安装在机床上或切削工具上,实时测量切削力变化。
2. 压电传感器法:压电传感器法是通过采用压电传感器直接嵌入工件中来测量切削力。
这种方法可以实现对切削力的直接测量,不受切削过程中液压等因素的干扰。
压电传感器法适用于小型机床和特殊加工场景。
3. 数值模拟法:数值模拟法是通过建立切削过程的力学模型,并通过计算机仿真来估计切削力。
这种方法可以预测不同切削条件下的切削力,并帮助优化切削工艺。
数值模拟法需要准确的材料力学参数和边界条件数据。
三、切削力分析方法:1. 力信号时域分析:力信号时域分析是对切削力信号进行时间序列分析,提取力信号的振幅、频率、周期和波形等信息。
这种方法能够揭示切削力的变化规律和切削过程中的动态特性。
2. 功率谱分析:功率谱分析是对切削力信号进行频谱分析,将力信号在频域上进行研究。
通过功率谱分析,可以确定切削过程中主要频率成分的强度和相位关系,从而了解切削过程中的振动和噪声特性。
3. 统计分析方法:统计分析方法基于大量实验数据的统计学原理,对切削力进行统计处理。
通过统计分析,可以确定切削力的平均值、方差、标准差和相关系数等参数,揭示不同因素对切削力的影响程度。
切削力测量实验数据的处理及分析
一、前言
本实验旨在研究不同切削参数对切削力的影响。
实验由测量切削力和
分析数据两部分组成,本文重点介绍这两部分的实验过程及其结果。
二、实验装置及参数
实验装置为一台深孔钻床,其中装有一个垂直切削刀具、一个切削力
测量装置及一个工件夹具。
测量装置为一个双拉千斤,有10组记录形式
的读数,用于测量切削时X方向和Y方向上的切削力。
实验参数为转速(N)和进给速率(Vf),分别取值:N = 1000 rpm,Vf = 0.04 mm/r。
三、实验过程
1、按设定的参数进行实验。
将深孔钻床转至设定的转速,同时在工
件夹具中装入样件,然后以设定的进给速率进行切削。
2、测量切削力。
在切削的同时,用双拉千斤测量X方向和Y方向上
的切削力,记录10组数据。
四、数据处理
1、将测得的各组数据依次写入excel中,使用数据处理及分析软件Matlab和Excel对数据进行处理和分析。
2、由于在实验中X方向和Y方向上的切削力可能存在偏差,因此需
要对数据进行相关系数分析,即计算实验数据之间存在的相关性,如果相
关性较高,则说明切削参数对两个方向上的切削力有影响,反之则说明误差主要来自于试验不精确;
3、在Excel中将数据进行统计,统计实验中X方向和Y方向上切削力的平均值、标准差;。
机械制造工程学实验指导书实验报告王庆明许虹肖民李英刘正道陆科杰编写班级:姓名:学号:华东理工大学机械与动力工程学院机械制造及其自动化教研室实验一切削力实验1 实验目的通过测量车削力,使学生掌握切削过程中切削力测量的根本方法,了解切削力的特性、影响因素以及对刀具、工件和切削过程的影响效应。
2 实验设备、工件与刀具1.KBJM6132数控车床2.YDC-Ⅲ89A三向压电车削测力仪。
3.PCI-9118DG数据采集卡4.DIN-50S接口板及附件5.圆柱工件、外圆车刀、3 实验原理切削力就是在切削过程中作用在刀具与工件上的力。
它直接影响着切削热的产生,并进一步影响着刀具的磨损、耐用度、加工精度和已加工外表质量。
在生产中,切削力又是计算切削功率、设计和使用机床、刀具、夹具的必要依据。
在切削实验和生产中,可以用测力仪测量。
目前最常用的测力仪是电阻式测力仪和压电式测力仪,本实验采用后者方式。
压电式测力仪YDC-Ⅲ89A 三向压电车削测力仪外型如图所示。
图1 YDC-Ⅲ89A 三向压电车削测力仪该测力仪同一些必要的二次仪表组合在一起,可以完成切削力的静、动态测试,从而使人们可以准确而容易地获得金属切削加工中最重要的参数,既三维切削力。
现在,金属切削理论的研究已由过去的静态测量开展到动态测量,对测力仪有了更高的要求。
YDC-Ⅲ89A 压电式车削测力仪能以其高刚度、高灵敏度、高固有频率能很好地满足静、动态测试的要求,可测出任意方向力的三个相互正交的分量〔Fx、Fy、Fz〕。
3.2压电石英晶体三维力传感器原理压电测力仪的工作原理是利用某些材料〔石英晶体或压电陶瓷等〕的压电效应。
在受力时,它们的外表将产生电荷,电荷的多少与所施加的压力成正比而与压电晶体的大小无关。
用电荷放大器转换成相应的电压参数,从而可测出力的大小。
图2为单一压电传感器的原理图。
压力F通过小球1及金属薄片2传给压电晶体3。
在压电晶体之间有电极4,由压力产生的负电荷集中在电极上,由绝缘的导体5导出。
切削力测量方法
1. 嘿,你知道不,有一种切削力测量方法叫测力仪测量法哟!就像你称体重一样,测力仪能精准地测出切削力呢!比如在车间里,工人师傅正用测力仪仔细测量着切削过程中的力,是不是很神奇?
2. 哇哦,还有应变片测量法呢!这就好像给切削过程装上了一个敏感度超高的“触角”,能捕捉到细微的变化呀!你想想看,在那精密的加工现场,应变片在默默地工作着,多厉害!
3. 哎呀呀,传感器测量法也很不错哦!它就像是一个超级小侦探,能把切削力的一举一动都摸得清清楚楚呢!好比在那个忙碌的工厂里,传感器随时监控着,一点也不马虎!
4. 嘿,你听我说,经验公式计算法也有它的妙处呢!这不就像一个智慧的老工匠,凭借经验就能大概算出切削力啦!就好像师傅们回忆着以往的经历,轻松得出结论呢!
5. 哇,还有有限元分析法呢,这简直就是个高科技的魔法呀!类似在一个虚拟的数字世界里,把切削力分析得透透的!你能想象那个画面吗?
6. 天哪,类比法也能用来测量切削力呀!这就好比用我们熟悉的东西去理解那复杂的力,多有意思!就像大家平时找相似之处一样,是不是很容易懂?
7. 嘿,最后还有个间接测量法呢!这就像走了一条特别的小路来知道切削力呢!比如通过其他相关的数据推断出切削力,是不是很巧妙呀!
我觉得这些切削力测量方法都各有各的奇妙之处,都为我们更好地了解和掌控切削加工提供了有力的手段啊!。
R l r r R lε∆∆=⋅=⋅ 3101234R R U U R R R R ⎛⎫=- ⎪++⎝⎭调平衡后,U 0=0所以R 1R 4=R 2R 3。
当四个桥臂的电阻值均相等,即R 1=R 4=R 2=R 3时的电桥成为等臂电桥。
若电桥中的R 1 =R 2=R 、R 4=R 3= R’,则称为卧式电桥。
若R 1=R 3=R ,R 4=R 2=R’则称为立式电桥,由于立式电桥的非线性系数是不确定的,因此在应变测量中,只应用等臂电桥和卧式电桥两种。
根据工作桥臂的多少,可将电桥电路分为单路电桥,半桥差动电路和全桥电路三种。
只有单臂工作的电桥电路称为单桥电路,如图4.7所示。
调平衡时,由上式可得311011234R R R U U R R R R R ⎛⎫+∆=- ⎪+∆++⎝⎭ 把R 1 =R 2、R 4=R 3代入可得111011111224R R R U U U R R R ⎛⎫+∆∆=-≈ ⎪+∆⎝⎭如果桥臂电阻和邻边桥臂电阻都有应变片替代,且使一个应变片受拉,另一个受压,这种接法称为半桥差动工作电路,如图4.8所示。
31102112234+R R R U U R R R R R R ⎛⎫+∆=- ⎪+∆+∆+⎝⎭ 若△R 1 =△R 2、R 1 =R 2、R 4=R 3,则102112R U U R ∆≈ 若R 1=R 3=R 4=R 2,△R 1=△R 3=△R 4=△R 2,则称为全桥电路,如图4.9所示。
输出电压为33110311223344+R R R R U U R R R R R R R R ⎛⎫-∆+∆=- ⎪+∆-∆-∆++∆⎝⎭ 1031R U U R ∆≈ 分析上边可得到单臂半桥和全桥工作时的输出电压,可得到(1)电桥灵敏度输出信号强度之比为1:2:4。
(2)电桥中相邻两臂电阻同向变化或者相对两臂电相反变化无输出信号;相邻两臂电阻相反变化或相对两臂电阻同向变化时输出信号强度为单臂工作时的两倍,此原理称为电补偿原理,对测力仪设计很重要。
(3)在电源电压不能调节时电桥各臂中应变片采用串接或并接时,测量结果将反应电阻变化的综合量,并不改变电桥的灵敏度。
4.3应变式测力仪常用变形元件的力学性能4.3.1直筋式变形元件的力学特性1.单臂固定悬臂梁受力后的弯矩和测量电桥如图4.10所示。
B 点处的弯矩M B 和应变最大,其值为 {max max B B M M Fl Fl WE εε==⎧⎪⎨==⎪⎩P 点处挠度最大,为3max 3p Fl f f EJ== 式中,M ax 为最大应力;E 为弹性常数;W 为断面系数;J 为惯性矩。
对矩形截面:2211=,612W bh J bh = 图4、102双固定端粱受力后的弯矩图和测量电桥如图4.11所示。
中点P 和两端点B 处的弯矩M P ,M B 和应变A P , A B 最大,其值为max max 88P B P B Fl M M M FlWE εεε⎧===⎪⎪⎨⎪===⎪⎩P 点处挠度最大,为max 192p Fl f f EJ ==3衍架结构受力时的弯矩图和测量电桥如图4.12所示。
分析后可知P 点只能有位移而不能有转角,相当于双端固定梁的一半。
弯矩M P ,M B 和应变A P , A B 可按双端固定悬臂梁公式计算。
P 点的挠度f 也可用上式计算。
4 直筋受正压力时即变形筋受力拉伸或压缩,变形筋上各点的应变均相等,当截面积为A 时,长度为l ,应变值和变形量为p B F f l Ebh F F E EA Ebh εσε⎧==⎪⎪⎨⎪===⎪⎩5直筋受切向力时在切向力F 的作用下,剪应力τ在矩形截面中分布如图4.13所示。
最大剪应力及其产生的应变为max max max 3232F bh F E Ebh γττγε⎧=⎪⎪⎨⎪==⎪⎩式中γ 与横向变形系数μ及h/b 的比值有关的系数。
筋受剪切力作用时的 ()6521Fl f bhG E G μ⎧=⎪⎪⎨⎪=+⎪⎩4. 4.3.2 环式变性元件的力学特性环式变性元件常用的有圆环和八角环。
八角环现在常用的形式如图4.14所示。
称为双半八角环,其简化力学模型是顶端只能水平位移而不能转角的八角环式圆环。
1 圆环的力学特性在圆环半径远大于其厚度时,圆环可以简化为薄环的情况推算,具体计算公式如下。
(1) 圆环在垂直力F Z 作用时,B 点的垂直位移:30.149Z z F R f EJ ⎛⎫= ⎪⎝⎭式中,R 为圆环的平均半径;J 为曲杆的惯性,在R ≥4h 时可用直杆的惯性矩2112J bh =。
圆环受力F Z 作用时的应力状态见图4.15(a ),环B 处的应力最大,但B 点是圆环和测力仪的基本连接处,贴应变片不便,平时取A 点进行测量。
A 点的应变为:21.09A Z A F E Ebh σε±== 在C 点,即离垂直轴角度为39.6°处,弯矩M Z =0,忽略力的作用,A c =0。
(2) 在切向力F X 作用时,考虑B 点受测力仪的约束,只能做水平位移而不能转角。
B 点的水平位移A B 为(3) 30.785x B f R f EJ=在A 点处应变为0。
在φ=39.6°处2=2.31x c F R Ebh ε 在φ=45° 2=2.81x x F R Ebh ε 图4.152 八角环的力学特性八角环的厚度不一致,受力时候的应变值和位移计算比较复杂。
平时可以用简化的计算方法,即使用一定的系数乘以圆环的公式。
测F Z 力2091Ebh F .Z Z Z ==(圆)(八)εε 测F X 力23x x 182Ebh R F .x ==(圆)(八)εεB 点的垂直位移和水平位移可用下式计算:⎪⎪⎩⎪⎪⎨⎧====EJ R F .f .f EJ R F .f .f x x x Z z z 33314052105960521(圆)(八)(圆)(八) 八角环变形元件力学特性的精确计算可用有限元法。
4.3.3薄壁圆筒变形元件的力学特性薄壁圆筒常用于测量扭矩,如钻削测力仪等。
当扭矩作用于圆筒产生剪应力,应变片贴成45度。
测扭矩的应变片粘贴位置和电桥链接电路如图4.17所示。
图4.17在扭矩作用时,应变值为()3316d D E M EW M E K K K M M -⨯===πτε 圆筒的转角位()()⎪⎪⎩⎪⎪⎨⎧+=-⨯=μπϕ123244E G d D G l M K M 4.4 典型应变式测力仪简介4.4.1 车削测力仪图4.18是美国麻省理工学院20世纪60年代研究的三向车削测力仪。
该测力仪变形元件为四个水平方向的半八角形,可以测得F x,,F y ,F z 三个方向的力,被国内很多单位采用。
图4,18由图可见,连成相应的电桥,可以测得F x,,F y ,F z 三方向的力,并用电补偿法消除各分力的相互干扰。
但是这种八角环测力仪存在一个缺点,主要是在z 方向上刚度较低,切削用量较大时易引起振动。
而哈尔滨工业大学研制的平行八角环三向车削测力仪,这种测力仪采用了八角环端面贴片测横向力的新方法,使平行八角环可测三向力,主切削力作用八角环刚度最高的受压方向,故测力仪刚度较高,切削时不易振动。
测力仪基本结构如图4.19所示。
图4,19测主切削力F z 是测八角环受压之力,用四片电阻应变片(R 1-R 4)贴在对角的两个半环中间,R 1和R 3受拉,R 2和R 4受压。
测进给力F x,是测八角环所受的切向力,用四片电阻应变片(R 5-R 8)贴在八角环外上斜表面上,R 7和R 8受拉,R 5和R 6受压。
测径向力F y,采用八片电阻应变片(R 9-R 16)贴在前八角环的前端面和后环的后端面,各分力互不干扰。
电阻应变片的布片形式及相应的电桥电路如图4.19所示。
4,4,2 钻削测力仪图4,20为薄壁圆筒式两向钻削测力仪,可测轴向力和钻削扭矩。
电阻应变片布片方式如图4,20所示。
图4,20对于桁架立式变形筋钻削测力仪,可测轴向力F z 和相互垂直的水平分力F x,和F y 。
钻削时候不仅有垂直力和扭矩,而且有径向力。
径向力在钻削时的方向和大小是变化的。
测出相互垂直的两个水平分力,可组合得到瞬时的径向力数值和方向。
电阻应变片的粘贴位置和电桥连接电路如图4.21所示。
图4.214,4,3 铣削测力仪铣削时作用在工件和铣刀上的切削力大小和方向在切削过程中是变化的,因此要求测出铣削扭矩M K进给分力F x,垂直分力F z和横向分力F y并要求测力结果不受作用点位置变化的影响。
要测上述四个力的参数,需要制造三向测力仪和装在机床立轴上的测扭矩刀杆。
采用组合八角环测力仪可以增加稳定性而不降低灵敏度,并且可以应用于不同场合的测力仪。
图4.22(a)所示是一种八角环式三向铣削测力台,可以同时测量四个切削分力;两个水平方向的分力垂直力和围绕垂直轴作用的扭矩。
每个八角环可以测量两向分力,由于四个环是相互垂直放置,故可测垂直分力和两个相互垂直的水平分力。
用电补偿原理消除各分力的相互干扰和力作用点位置改变的影响。
这种测力台也可用于钻削和刨削,被称为万能测力仪。
这种测力仪主要缺点为不是整体结构,八角环和上下底板连接刚度不够,应徐昂测力仪刚度。
为提高测力仪的刚度,有人讲上述测力台改成整体结构如图4.22(b)所示。
上述两种铣削测力台都存在着自身的不足,从而设计出直筋式三向测力台(见图4,23),这种测力仪为整体结构,由两端支架固定在工作台上,采用电补偿原理消除各分力相互干扰和切削力作用点位置改变的影响,测力仪刚度高性能良好,适用于进给力较大的卧铣使用。
图4.24介绍的是一种旋转式铣削测力仪,主要包括:刀柄,力(扭矩)传感器,松耦合感应电源,信号调理及调制器,无线信号发射/接收器。
图4,24将旋转式铣削测力仪上集成了感应电源和控制电路的测力刀柄安装在铣刀主轴上,当刀具切削加工工件时,刀具所受的切削扭矩和切削力作用在刀柄弹性元件上使之产生弹性变形。
贴在敏感元件上的应变片感受到变形使测量电桥输出微弱的电压值,这个电压值经过调理放大和转换后成为数字信号,然后由处理器将信号编码通过无线射频芯片将信号发射出去,地面接收端将受到信号后,解码后传输给计算机进行存储后将信号发射出去,地面接收端受到信号后进行处理分析,旋转测力仪既可以采集加工过程中的铣刀切削力也可以采集机床振动信号。
4.4.4磨削测力仪一般分为两种,一种是外圆磨床使用的测力仪,这种测力仪用一对测力顶尖,原理如图4..25所示。
可以测得磨削时的径向力和切向力。
另一种是平磨时使用的测力仪,可以测得平磨时的垂直力和切向力。
4.4.5 滚齿测力仪滚齿测力仪是一种可以测量滚削齿轮时的三向测力仪,应变片(R1-R4)贴在刀杆上,导线用激流环引出,可测Fz引起的刀杆扭矩,应变片应变片(R5-R8)可测径向力,应变片(R9-R16)可测进给力引起的工件轴扭矩,如图4.27所示。