北航 南航自动化 考研真题
- 格式:pdf
- 大小:461.88 KB
- 文档页数:10

北航南航自动化考研真题哎呀,说起北航和南航自动化考研真题,那可真是让不少同学又爱又恨呀!我记得有一次,碰到一个准备考北航自动化的同学,他那一脸的焦虑和迷茫,就像在大雾中找不到方向的小船。
他跟我说,每天面对那些真题,感觉自己像是在解一个又一个的谜团,有时候明明觉得自己已经掌握了知识点,可一看到真题,还是会被打得措手不及。
咱先来说说北航的自动化考研真题。
那题目类型真的是五花八门,从基础的理论知识到复杂的实际应用,啥都有!就拿控制理论这部分来说,题目可不是简单地让你背个公式就能解决的。
它会给你一个看似平常的系统,然后让你分析它的稳定性、能控性、能观性。
这就像是让你去拆解一个精密的机器,每个零件都得搞清楚。
而且北航的真题还特别注重考察你对知识点的深入理解和灵活运用。
有时候一道题,表面上是在考某个定理,实际上是在考验你能不能把几个相关的知识点串联起来,形成一个完整的解题思路。
再看看南航的自动化考研真题,也是别有一番“风味”。
南航的题目更侧重于实际工程中的问题,比如说让你设计一个控制系统来解决某个具体的生产线上的难题。
这就要求你不仅要有扎实的理论基础,还得有丰富的实践经验。
记得有一道真题,是关于飞行器的姿态控制,那可真是把好多同学都难住了。
题目给出了各种复杂的飞行条件和参数,让你设计出一套能够稳定控制姿态的方案。
这可不仅仅是纸上谈兵,而是真真切切地考验你解决实际问题的能力。
做这些真题的时候,就像是在攀登一座又一座的山峰。
有时候你觉得自己已经快要登顶了,结果发现前面还有更高更险的山峰等着你。
但是别灰心,每一道真题都是一次成长的机会。
每解决一道难题,就像是给自己的装备库里又添加了一件强大的武器。
所以啊,准备考北航和南航自动化的同学们,别怕真题的刁难。
把每一道真题都当成是一个挑战,一个提升自己的机会。
认真分析,多做总结,相信自己一定能够攻克这些难题,向着自己的梦想前进!总之,北航和南航自动化考研真题虽然难,但只要咱们下足功夫,用心钻研,就一定能找到解题的窍门,成功上岸!加油吧,考研的小伙伴们!。
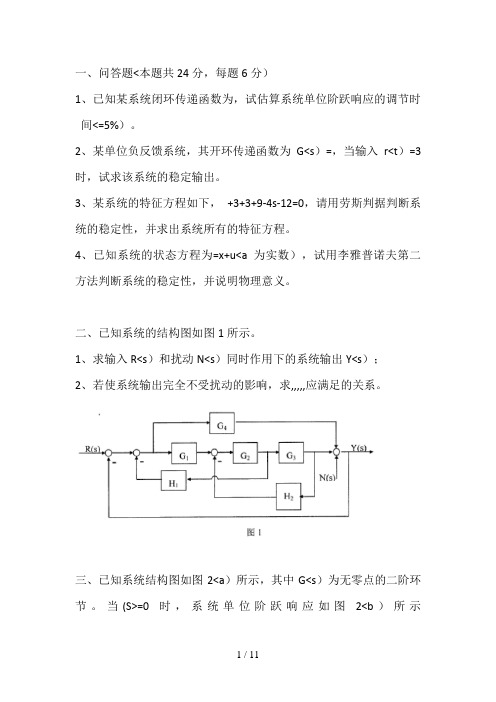
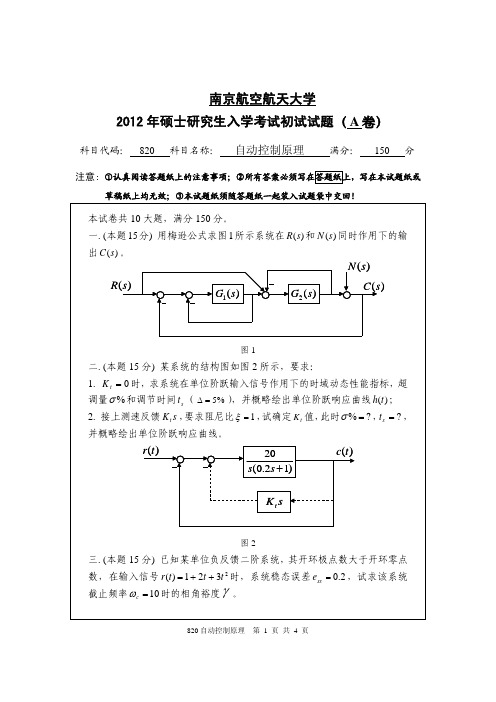
一、问答题<本题共24分,每题6分)1、已知某系统闭环传递函数为,试估算系统单位阶跃响应的调节时间<=5%)。
2、某单位负反馈系统,其开环传递函数为G<s)=,当输入r<t)=3时,试求该系统的稳定输出。
3、某系统的特征方程如下,+3+3+9-4s-12=0,请用劳斯判据判断系统的稳定性,并求出系统所有的特征方程。
4、已知系统的状态方程为=x+u<a为实数),试用李雅普诺夫第二方法判断系统的稳定性,并说明物理意义。
二、已知系统的结构图如图1所示。
1、求输入R<s)和扰动N<s)同时作用下的系统输出Y<s);2、若使系统输出完全不受扰动的影响,求,,,,,应满足的关系。
三、已知系统结构图如图2<a)所示,其中G<s)为无零点的二阶环节。
当(S>=0时,系统单位阶跃响应如图2<b)所示1.求G<s)的表达式。
2.若(S>=,在输入r(t>=时,稳态误差为零,试确定a、b。
<15分)四、某正反馈系统的结构图如图3所示,试求:1.绘制参数a从0 →∞变化的根轨迹。
2.当系统稳定情况下,求阻尼比最小时的闭环传递函数。
<15分)五、已知某最小相位系统的结构图如图4<a)所示。
其中,>0,前向通路G<s)的对数幅频特性曲线如图4<b)所示。
1.求G<s)的表达式。
2.用奈氏稳定判据分析使闭环系统稳定的的取值范围。
3.若=0.2时,求系统相角裕度。
六、系统结构图如图5所示,已知K=10,T=0.1时,截止频率=5. 若要求不变,如何改变K和T才能使系统相角裕度提高?<13分)七、某离散系统的结构图如图6所示,1.判断该系统的闭环稳定性;2.若r(t>=1(t>, 求c(2>、c(> 的数值。
<15分)提示:z[ ]=八、某非线性系统如图7所示,已知非线性环节描述函数为N(A>= ,1. 分析参数K对系统自由运动的影响;2. 若能产生自激振荡,试求使系统输出c<t)处振幅为1时的自激振荡频率和参数K的值。

北航考研试题北京航空航天大学(以下简称北航)是我国著名的高等学府之一,以航空航天科学技术为主要特色,在研究和教育方面享有盛誉。
每年,众多考生都怀揣梦想和希望报考北航研究生,争取进入这个学术殿堂,为自己的学术生涯铺就坚实的基础。
北航的考研试题一直具有一定难度和专业性,旨在选拔最优秀的学子。
以下是对北航考研试题的简要介绍和分析。
1. 数学题北航考研试题的数学部分常常侧重于数学基础知识和技巧的应用。
涵盖的知识点包括但不限于线性代数、概率论与数理统计、高等数学等。
试题往往注重考察考生的运算能力、证明能力和问题解决能力。
例如,一道典型的北航考研数学题如下:给定一个矩阵A,已知它的特征值为λ1=2,λ2=-1,求矩阵A^-1的特征值。
此类题目要求考生熟练掌握矩阵运算和特征值的相关概念和计算方法,同时要求考生具备较强的推理和计算能力。
2. 专业课题目北航的专业课试题主要与航空航天、机械、电子信息等相关学科有关,包括航空航天原理、航空发动机原理、飞行器设计、电路分析等内容。
试题形式包括选择题、计算题和综合题。
例如,下面是一道典型的北航考研专业课试题:已知一飞机在水平飞行状态下,速度为50m/s,面积为20m^2,阻力系数为1.5。
求该飞机在此状态下阻力大小。
此类题目旨在考察考生在专业领域的基础知识和计算能力,要求考生能够熟练运用专业知识解决实际问题。
3. 英语题英语是北航考研试题中的一项必考科目,试题包括阅读理解、单词填空、语法填空等。
北航的英语试题相对较难,考察考生对英语语法和词汇的掌握,同时也要求考生对英语文章的理解和分析能力。
例如,下面是一道北航考研英语阅读理解题目:According to the passage, which of the following statements about North University is TRUE?A. It is located in the northern part of Beijing.B. It offers a wide range of undergraduate programs.C. It is known for its strong engineering programs.D. It has the highest enrollment of international students.此类题目考察考生对英语文章细节和主旨的把握能力,要求考生具备扎实的英语语言基础和阅读能力。
--------------------------------- 第七期:非线性系统理论------------------------------------------ -------------------------------------自动控制原理小组-------------------------------------------- 1. 本章主要有两个出题方向:(1)根轨迹 (2)描述函数 2. 准确把握重要概念(如:自激振荡等)有利于解题。
3. 本章7-4根轨迹分析时,课本常用的解2()1(1)N X S S +法是将微分方程求解,从而得相轨迹。
但在实际题目求解时,不需要求出该解析解,用等倾线法即可做出图形。
何况有时即便得出解析解也无法准确画出图形。
真题详解: 2004(五)已知闭环非线性系统得微分方程为()0x x sign x x ⋅⋅++-= 式中符号函数定义为:1. 在x x -相平面上确定开关线,指明每个区域相轨迹奇点的位置和类型,并说明系统运动的趋势;2. 在x x -平面上做出始于(0)2,(0)0x x ==的相轨迹曲线(要求写出第一段相轨迹表达式),并求出这条相轨迹与开关线第一次相交处的坐标和对应的时间。
解答:1. 开关线一般由已知得分段条件确定 由已知则开关线为x x =(1) ()f x x x =->0 即 x x < 时 令微分方程10x x ⋅⋅++= (ϒ)(1)00d x x dx x-+== 奇点为( -1,0 ) 令 1u x =+ 则 (ϒ)式变为 0u u ⋅⋅+=由线性系统的相轨迹分析,该系统为无阻尼运动( 0ξ= ),故奇点为中心。
(2)()0f x x x =-< 即 x x > 时()f x x x =-10x x ⋅⋅+-=(1)d x x dx x--=奇点为( 1,0 ),类型为中心。
系统的运动趋势:砸死开关线两侧分别为以( -1,0 )和( 1,0 )为原点的一族半径越来越大的部分圆,但都在开关线处转向另一个区域的相轨迹,为发散趋势。

2010-2011 学年 第一学期期末试卷
考试日期: 年 月 日
考试科目:《现代控制理论及应用》(A 卷) 注意事项:1、闭卷考试
题目:
一、(本题共16分,第1题8分,第2题8分)
1、已知系统的微分方程为........23537y y y y u u +++=+,试列写出能观标准型的状态空间表达式;
二、(本题共16分,第1题8分,第2题8分)
1、对于000,)(),()()()()(t t x t x t u t B t x t A t x
≥=+= ,已知其状态转移矩阵为),(0t t Φ,试列写出系统的零输入响应和零状态响应;
2、求系统010,0032x x u t ⎡⎤⎡⎤=+≥⎢⎥⎢⎥-⎣⎦⎣⎦
在采样周期为0.2T s =的离散化状态方程
三、(本题 16 分)
试确定当p 取何范围时,下列系统能控; q 取何范围时,系统能观
1122120,101x x p u x x -⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦ []⎥⎦⎤⎢⎣⎡=211x x q y 四、(本题 16 分)试分别利用LYAPUNIV 第一方法和第二方法判断系统1234x x -⎡⎤=⎢⎥--⎣⎦
是否为大范围渐进稳定
(2)确定一个全维状态观测器,使得观测器的特征值为5-;
六、(本题 18 分)
(1)设系统状态方程和初始条件为()22x
t x u =+ , (0)3x =, 试确定
(2) 简述古典变分法与最优控制的相同点和不同点。

真题详解:2002(四)单位负反馈系统的开环传递函数为:2()(0.11)KG s s s =+ 其中K 值分别 取1和100,试用对数频率稳定性判据,判别两种情况下闭环系统的稳定性。
点题:对数频率稳定性判据是在对数坐标系上作出开环幅相特性曲线,进而根据开环对数幅频与相频曲线相互关系来判别闭环系统稳定性。
本题关键是考查对数频率特性曲线的作法。
解答:用Matlab 作出的频率特性曲线如下图:2()(0.11)KG s s s =+是由四个典型环节组成,分别计算各环节的对数幅频以及相频(1) 1()G s K =1()20lg |()|20lg L w G jw K == 1()0w ϕ= (2 ) 21()G s s=决定低频段的斜率 2()20lg L w w =-2()2w πϕ=-(3) 241()()0.11G s G s s ==+234()()20lg (0.1)1L w L w w ==-+ 3()arctan(0.1)w w ϕ=-转折频率 341100.1w w === 分别作出各环节的对数幅频和相频曲线,相加即得系统对数幅相特性曲线。
123()()()2()w w w w ϕϕϕϕ=++ 2arctan(0.1)2w π=--当10w =时 ()w ϕπ=- ( 如图 ) 当1K = 时, 由图可得截止频率 1c w =在对数幅频 ()0L w dB > 的频率范围内,对应的开环对数相频曲线 ()w ϕ 对 π- 线无穿越,又开环正极点个数 0p =,则 N p = 故系统稳定。
当 100K = 时,由图易得在 ()0L w dB > 的范围内,()w ϕ 对π-线有一次穿越,N p ≠ ,故系统不稳定。
( 李琳怡….汤章阳 录入:张巍 )2002(五)系统结构图如题五图所示,试选取β值使系统具有阻尼比ς=0.707,并选取()G s 使得干扰N 对系统输出没有影响。

模拟电路与数字电路(I )——放大电路题注:从本期学习专刊开始数模电小组会按照专题出复习题,由于每年的考研试题有一定的固定题型,所以会最先将固定大题覆盖到,然后出概念题和模拟题。
如果大家有建议,可以向数模组反映。
本次专题为放大电路的分析,挑选01—05年的考研真题和我系的一份期末考试试题,应该说这种题型有极大的固定性,希望大家能切实掌握。
一.(2001)放大电路如图所示,已知 1212,,,be be r r ββ, 1.画出整个电路的微变等效电路;2.写出放大器的电压放大倍数V A =0V /I V ,输入电阻I R ,输出电阻0R 的表达式。
解答如下:1) 整个电路的微变等效电路如下:2) 放大器的电压放大倍数V A ,输入电阻I R ,输出电阻0R 的表达式如下:121112220111222220111112222221111////[(1)]//1//[(1)//](1)(//)**[(1)][(1)//]//[(1)//(*(1)I B B be E be C O E O O b C be E L b E L V I I b be E b be E L C be E L be E R R R r R r R R R V V V i R r R R i R R A V V V i r R i r R R R r R R r R ββββββββββ=+++=+-+++===++++++=-++222221)(//)(1)(//)E L be E L R R r R R ββ+++二(2002)放大电路如图所示,已知β,r, 1.画出电路的微变等效电路; 2.写出输入电阻表达式; 3.写出输出电阻表达式;4.写出放大倍数A= /O S V V 的表达式 解答如下:1) 电路的微变等效电路如下: 2) 输入电阻表达式如下: 3) 输出电阻表达式如下:4)放大倍数A= /O S V V 如下:12101121011211212//////1//////[(1)//](1)(//)****////[(1)//)//////[(1*////I B B be be C O E O O B B be b C be E C b E C I V S S I S B B be b be b be E C B B be C be S B B be R R R r r R R R V V V R R r i R r R R i R R V A V V V V R R R r i r i r R R R R r R r R R R r ββββββ=+=+-+++===+++-++=+)//](1)(//)*(1)//E C E C be be E CR R R R r r R R βββ+++ 三(2003)放大电路如图所示,已知1β, be r ,m g 1.画出电路的微变等效电路; 2.写出输入电阻表达式;3.写出输出电阻表达式;4.写出放大倍数A=0V /SV ;解答如下:1) 电路的微变等效电路如下:2) 输入电阻表达式如下: 3)输出电阻表达式如下: 4)放大倍数A=V/V 如下:四(2004) 放大电路如图所示,已知β,ber ,mg1.画出电路的微变等效电路;2.写出输入电阻表达式和输出电阻表达式; 3.写出放大倍数A=0V /S V ;解答如下:1)电路的微变等效电路如下:2) 输入电阻表达式和输出电阻表达式如下: 3)放大倍数A=V/V 如下:微变等效电路图中应为共漏极。

2023年全国硕士研究生入学考试自动化真题题目一:控制系统理论与设计一、选择题1. 对于一个稳定控制系统,以下说法正确的是:a) 系统的输入与输出之间存在比例关系b) 系统的输出在整个时间范围内都是周期性的c) 系统的输出在无限时间内趋近于一个固定的值d) 系统的输出不会受到干扰2. 下列关于串级控制系统的说法中,正确的是:a) 主控制器响应速度较快b) 前级控制器响应速度较快c) 只有一个控制回路d) 只适用于特定类型的过程3. 在反馈控制系统中,负反馈具有以下优点:a) 提高系统的稳定性b) 减小系统的带宽c) 提高系统的超调量d) 增加系统的延迟时间二、填空题1. 控制系统中的传递函数是用来描述系统的。
2. 闭环控制系统中,稳态误差可以通过增加来减小。
3. 控制系统的控制对象是指。
4. 控制系统中比例控制器的传递函数为。
5. 控制系统中积分控制器的传递函数为。
三、简答题1. 请解释反馈控制系统与前馈控制系统的区别,并举例说明。
反馈控制系统和前馈控制系统是两种常见的控制系统结构。
它们的区别在于反馈路径的存在与否。
在反馈控制系统中,系统的输出值通过传感器反馈给控制器,控制器根据反馈信号调整控制策略,进而影响系统的输入,以实现对系统输出的控制。
反馈控制系统通过监测系统的实际输出与期望输出之间的差异,来调整控制信号并纠正系统的偏差,从而提高系统的稳定性和鲁棒性。
例如,温度控制系统中的恒温器,通过检测环境温度与设定温度之间的差异,自动调节供暖或制冷设备的输出。
相比之下,前馈控制系统是一种预测性控制方法,它根据事先确定的模型和目标输出,直接计算出控制信号,而不需要通过反馈路径来调整控制器的输出。
前馈控制系统可以在系统受到干扰时提前作出响应,并在前馈路径的作用下减小输出误差。
例如,在飞机自动驾驶系统中,根据预先建立的飞行动力学模型和目标航迹,使用前馈控制来精确控制飞机的姿态和位置。
2. 简述PID控制器的工作原理,并解释每个参数对系统响应的影响。