单自由度系统振动
- 格式:pdf
- 大小:495.37 KB
- 文档页数:39
第二章单自由度系统振动§1-1 概述单自由度系统的振动理论是振动理论的理论基础。
(1)尽管实际的机械都是弹性体或多自由度系统,然而要掌握多自由度振动的基本规律,就必须先掌握单自由度系统的振动理论。
此外,(2)许多工程技术上的具体振动系统在一定条件下,也可以简化为单自由度振动系统来研究。
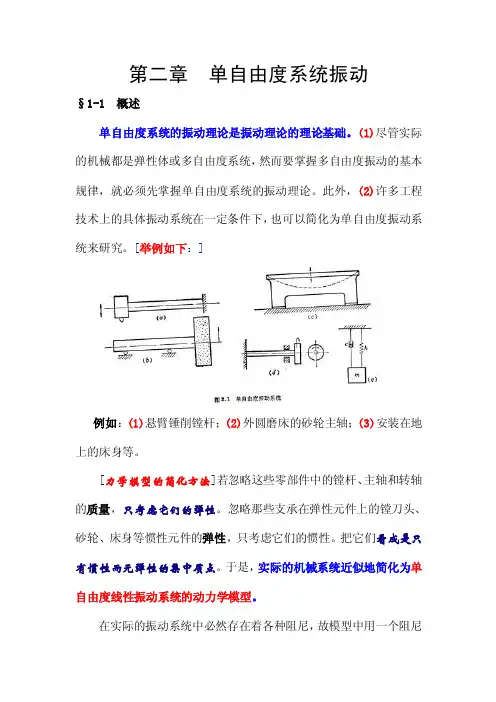
[举例如下:]例如:(1)悬臂锤削镗杆;(2)外圆磨床的砂轮主轴;(3)安装在地上的床身等。
[力学模型的简化方法]若忽略这些零部件中的镗杆、主轴和转轴的质量,只考虑它们的弹性。
忽略那些支承在弹性元件上的镗刀头、砂轮、床身等惯性元件的弹性,只考虑它们的惯性。
把它们看成是只有惯性而无弹性的集中质点。
于是,实际的机械系统近似地简化为单自由度线性振动系统的动力学模型。
在实际的振动系统中必然存在着各种阻尼,故模型中用一个阻尼器来表示。
阻尼器由一个油缸和活塞、油液组成。
汽车轮悬置系统等等。
[以上为工程实际中的振动系统]单自由度振动系统——指用一个独立参量便可确定系统位置的振动系统。
所有的单自由度振动系统经过简化,都可以抽象成单振子,即将系统中全部起作用的质量都认为集中到质点上,这个质点的质量m 称为当量质量,所有的弹性都集中到弹簧中,这个弹簧刚度k称为当量弹簧刚度。
以后讨论中,质量就是指当量质量,刚度就是指当量弹簧刚度。
在单自由度振动系统中,质量m、弹簧刚度k、阻尼系数C是振动系统的三个基本要素。
有时在振动系统中还作用有一个持续作用的激振力P。
应用牛顿运动定律,作用于一个质点上所有力的合力等于该质点的质量和该合力方向的加速度的乘积。
(牛顿运动定律)(达伦培尔原理)现取所有与坐标x 方向一致的力、速度和加速度为正,则:kx x C t P xm --= ωsin 0 (牛顿运动定律) (达伦培尔原理:在一个振动体上的所有各力的合力必等于零) (动静法分析:作用在振动体上的外力与设想加在此振动体上的惯性力组成平衡力系)上式经整理得,t P kx x C xm ωsin 0=++ (2.1) 该式就是单自由度线性振动系统的运动微分方程式的普遍式。

单自由度振动系统m质量,k刚度,c阻尼,有时有p激振力单自由度振动系统,指用一个独立参量便可确定系统位置的振动系统。
只要以它的平衡位置取为坐标原点,任一瞬时的质点坐标x(线位移)或 (角位移)就可以决定振动质点的瞬时位置。
根据牛顿定律:mx+cx+kx=F1.单自由度系统无阻尼自由振动mx+kx=0;x+kmx=0;令w m2=k/m,求微分方程的解,得x=c1e iw n t+c2e−iw n t=c1+c2cosw n t+i c1−c2sinw n t=b1cosw n t+b2sinw n t将其合成一个简谐振动,并代入初始条件:t=0时,x=x0,x=x0x=Asin(w n t+φ); A=x2+x02w n2; φ=tg−1x0w nx01.1固有频率系统的圆频率和频率只与系统本身的物理性质(弹性和惯性)有关,因此当振动系统的结构确定后,系统的振动频率就固定不变,而不管运动的初始条件如何,也和振幅的大小无关,因此成为固有圆频率和固有频率。
w n=km ;f n=12πkm1.2固有频率计算方法1)公式法。
根据公式w n=km计算2)静变形法。
根据质量块所处平衡位置的弹簧变形计算。
3)能量法。
根据能量守恒定律,由于无阻尼,无能量损失,12mx2+12kx2=E,将x的方程代入上式,系统的最大动能等于系统的最大弹性势能,计算求出。
4)瑞利法。
考虑到系统弹簧质量的计算方法,如假设系统的静态变形曲线作为假定的振动形式,根据推倒,得出系统的固有频率为w n=km+ρl3,式中加入的部分为“弹簧等效质量”不同振动系统的等效质量不同,只需先算出弹性元件的动能,根据T s =12m s x 2,计算即可。
1.3扭转振动根据扭转运动的牛顿定律 M =I θ,M 为施加到转动物体上的力矩,I 转动物体对于转动轴的转动惯量,θ角加速度。
圆盘转动惯量为I ,轴的转动刚度为kθ。
系统受到干扰后做扭转自由振动,振动时圆盘上受到一个由圆轴作用的与θ方向相反的弹性恢复力矩-K θθ。


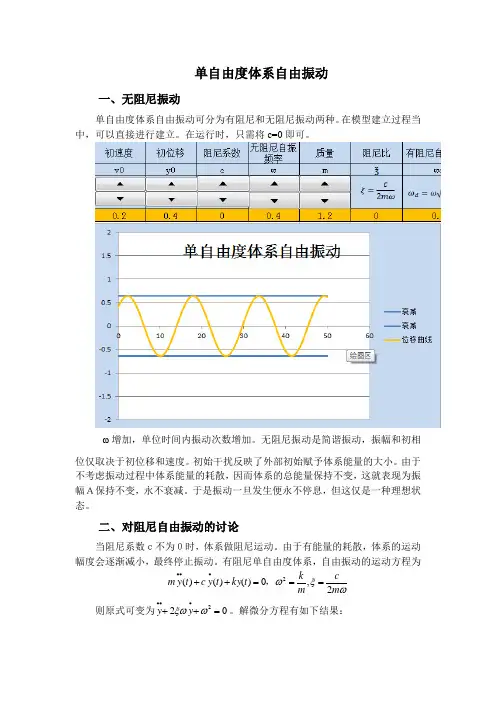
单自由度体系自由振动一、无阻尼振动单自由度体系自由振动可分为有阻尼和无阻尼振动两种。
在模型建立过程当中,可以直接进行建立。
在运行时,只需将c=0即可。
ω增加,单位时间内振动次数增加。
无阻尼振动是简谐振动,振幅和初相位仅取决于初位移和速度。
初始干扰反映了外部初始赋予体系能量的大小。
由于不考虑振动过程中体系能量的耗散,因而体系的总能量保持不变,这就表现为振幅A保持不变,永不衰减。
于是振动一旦发生便永不停息,但这仅是一种理想状态。
二、对阻尼自由振动的讨论当阻尼系数c不为0时,体系做阻尼运动。
由于有能量的耗散,体系的运动幅度会逐渐减小,最终停止振动。
有阻尼单自由度体系,自由振动的运动方程为ωξωm c m k t ky t y c t y m 2,0)()()(2===++∙∙∙, 则原式可变为022=++∙∙∙ωξωy y 。
解微分方程有如下结果:2.1 当1<ξ时,即小阻尼运动,方程的解为:)sin(A )sin cos ()(000ϕωωωξωωξωξω+=++=--t e t y v t y e t y d t d d d t 其中2200201)(ξωωωξω-=++=d d y v y A可画出小阻尼体系自由振动时的y-t曲线如图所示:是一条逐渐衰减的波动曲线2.2 当1>ξ时,即大阻尼的情况,方程的解为:⎥⎥⎦⎤⎢⎢⎣⎡-+--+=-t ch y t sh v y e t y o t ωξωξξξωωξ11)1()(20220 上式不含有简谐振动的因子,是因为体系受干扰后偏离平衡位置所积蓄起来的初始能量在恢复平衡位置的过程中全部消耗克服阻尼,由于阻尼很大,不足以引起振动。
当初始速度,初始位移都大于0时,可画出大阻尼体系自由振动时的y-t曲线如图所示:2.3 当1=ξ时,即临界阻尼的情况,方程的解为:[]t v t y e t y t 00)1)(++=-ωω(当初始速度,初始位移都大于0时,可画出临界阻尼体系自由振动时的y-t曲线如下图所示;当体系在临界阻尼时,其运动衰减的最快,即他能在最短时间内无振动的回到平衡位置。
第2章 单自由度(SDOF)系统振动(Single Degree of freedom)如果振动系统任意时刻的空间位置只需要一个独立参数来表达,则称为单自由度系统。
本章介绍单自由度系统运动方程的建立,以及自由振动的特点和动力响应的计算问题。
2.1 运动方程的建立此处分别应用基于达朗贝尔原理的直接平衡法、虚位移原理和哈密顿原理建立振动微分方程。
2.1.1 直接平衡法承受动力荷载作用的任何单自由度系统均可以由图2—1所示的模型来代表。
图2—1(a)中,m 为质量块的质量(kg ),是为弹簧的刚度(m N /),c 为粘滞阻尼系数(m s N /⋅),)(t P 为干扰力(N )。
将坐标原点设在质量块的静平衡位置处,坐标y 即为相对于静平衡位置产生的质量块的动位移。
在任意瞬时取质量块的隔离体,如图2—1(b)所示,作用于质量块上的力有下列四种:(1)弹性恢复力(它等于弹簧刚度k 与位移y 的乘积),ky f s =,与位移的方向相反;(2)阻尼力(假设为粘滞阻尼机理,它等于阻尼常数c 与速度y 的乘积),yc f D =,与速度的方向相反;(3)惯性力(根据d ’Alembert 原理,它等于质量m 与加速度y的乘积),ym f I =,与加速度的方向相反; (4)干扰力,)(t P .(根据竖向力的动平衡条件即直接平衡法得出))(t P ky y c ym =++ (2—1) 在振动的任意时刻,这四种力都保持着平衡,只是各个力所占的比例不同而已。
由方程(2—1)可知,相对于动力系统的静力平衡位置所建立的运动方程是不受重力影响的。
换言之,此类情况可以不考虑重力影响建立方程。
由于这个原因,建立方程时,位移都以静力平衡位置作为坐标原点,由此方程仅能得到系统的动位移,而总的位移应该是动力位移响应和静力位移值的叠加。
2.1.2 虚位移原理以图2—1所示的结构系统说明如何应用虚位移原理建立方程。
令质量m 发生虚位移y δ,则作用在质量m 上的四个力所作的总虚功应该等于零,即0)(=+---y t P y f y f y f s D I δδδδ式中的负号是因为力的方向和虚位移的方向相反。