十字滑台设计
- 格式:doc
- 大小:301.00 KB
- 文档页数:11

机械制造工艺学课程设计设计题目:十字滑台支撑块机械加工工艺规程制定学生姓名:班级:机电BZ152学号:指导教师:起止日期:2016.6.20-2016.7.8课程设计(论文)任务书二级学院:应用技术学院学号学生姓名专业(班级)机电BZ152设计十字滑台支撑块工艺规程编制设计题目设计技术参数图一图一所示是十字滑台支撑块的简图。
毛坯材料为Q235。
大批量生产,采用通用机床进行加工。
试完成该零件的机械加工工艺设计。
设计要求一、设计者必须发挥独立思考能力,禁止抄袭他人成果,不允许雷同。
积极主动与指导教师流,每一进展阶段至少与指导教师交流二次。
二、设计成果:1、零件图一张, A4;2、设计说明书一份;3、工艺规程卡一套,工序卡若干张。
设计说明书应包括下列内容:(1)封面(2)目录(3)摘要和关键词(4)设计任务书(5)机械加工工艺规程制定的详细过程主要包括:1)零件的结构分析2)生产类型的确定3)毛坯的选择与毛坯简图的绘制4)工艺路线的拟定5)各工序的加工余量及工序尺寸的确定。
6)切削用量的计算和确定7)时间定额的计算和确定8)参考文献(要包含资料的编号、作者名、书名、出版地、出版者、出版年月)。
三、定稿完成后,按照学校要求打印、装订,装袋,并和电子稿一起交给老师,并准备答辩。
工作量1、设计说明书一份2、2、工艺规程卡一套,工序卡若干张。
工作计划序号环节时间分配备注1 熟悉零件,测绘零件,设计准备工作22 机械加工工艺规程制定 33 填写机械加工工艺卡片 44 分析工序定位和加紧方案 35 撰写设计说明书 26 答辩 1小计15天参考资料1、《金属切削加工手册》;2、《机床夹具设计手册》;3、《机械制造工艺学》;4、《机械制造工艺学课程设计指导书》。
指导教师签字教研室主任签字说明:此表一式叁份,学生、指导教师、二级学院各一份。
机械制造工艺学课程设计计算说明书设计题目十字滑台支撑块工艺规程编制设计学院(系):专业:机械设计制造及其自动化班级:机电BZ152姓名:学号: 6指导老师:李瑞洋完成日期:2016.7.8目录序言 (1)一.零件工艺分析及生产类型确定 (1)1. 零件的作用 (1)2. 零件的工艺分析 (2)3. 零件的生产类型 (2)二.选择毛坯,确定毛坯尺寸,设计毛坯图 (3)1. 确定毛坯类型 (3)2. 确定毛坯制作方法 (4)3. 确定毛坯表面加工余量 (4)4. 确定机械加工余量 (5)5. 确定毛坯尺寸 (5)6. 确定毛坯尺寸公差 (6)7.毛坯设计图 (6)三,选择加工方法,制定工艺路线 (7)1. 定位基准选定 (7)2.选定加工方法及工艺路线 (7)3.选择加工设备与工艺装备 (8)四.切削用量和基本时间的确定 (8)工序01 粗铣外轮廓平面 (9)工序03 钻孔 (9)五.相关夹具 (9)六.总结及参考文献 (10)5.1.总结 (10)5.2.参考文献: (10)序言机械制造技术基础课程设计是在学完了机械制造技术和部分专业课,并进行了生产实习的基础上的又一个实践性的重要教学环节。

十字滑台设计方案引言十字滑台是一种常用于机械系统中的运动机构,它具有简单、可靠、高精度等特点,被广泛应用于各种工业机械中。
本文将介绍一个十字滑台的设计方案,包括设计原理、结构和材料选用等内容。
设计原理十字滑台的设计原理基于直线运动与旋转运动的组合,通过多个组件的协同工作,实现平移和转动的综合运动。
其主要由导轨、滑块、连接杆、传动杆等组成。
首先,导轨是十字滑台的基础组件,用于固定与支撑滑块。
导轨一般采用高强度的金属材料制造,如铝合金或不锈钢。
导轨具有高精度的加工要求,以保证滑块的平稳移动。
滑块是十字滑台的核心组件,它与导轨相配合,在导轨上实现平移运动。
滑块一般采用铝合金材料,具有良好的刚性和耐磨性。
滑块内部可以设置滚珠轴承或直线导轨轮等零部件,以提高平移的精度和稳定性。
连接杆用于将滑块与传动杆连接起来,使得滑块的平移运动可以通过传动杆传递给被控制的机构。
连接杆的长度和角度需要根据具体应用要求进行设计。
传动杆用于将导轨和滑块的平移运动转化为旋转运动。
传动杆可以采用螺旋齿轮、伞齿轮等传动机构,确保导轨的平稳、可靠运动。
结构设计十字滑台的结构设计需要考虑以下几个方面:滑块的尺寸和形状、连接杆的长度和角度、传动杆的类型和传动比、导轨的选用和固定等。
滑块的尺寸和形状需要根据具体应用场景和被控制的机构来确定。
一般来说,滑块越大,能够承载的负荷越大,但滑动阻力也相应增大。
滑块的形状可以根据导轨的形状来设计,常见的有槽型、V型等。
连接杆的长度和角度需要根据被控制的机构的位置和运动要求来确定。
连接杆的长度需要考虑机构之间的安全距离,保证工作过程中的安全性。
传动杆的类型和传动比需要根据具体应用的平移和旋转运动要求来选择。
螺旋齿轮传动可以实现高精度的转动,而伞齿轮传动则适用于大负荷、高速运动的场景。
传动比的选取要根据实际要求进行计算和优化。
导轨的选用和固定需要考虑滑块的平稳移动和固定的稳定性。
根据滑块的尺寸、负荷和运动方式来选择合适的导轨类型,如滑动导轨、滚动导轨等。
重庆理工大学课程设计X-Y数控工作台的机电系统设计学院:重庆机械工程学院专业:机械设计制造及其自动化班级:机电 2班教师:张明德学号:学生:目录1、引言: (3)2、设计任务 (4)3、总体方案的确定 (4)3.1 机械传动部件的选择 (4)3.1.1导轨副的选用3.1.2丝杠螺母副的选用3.1.3减速装置的选用3.2 控制系统的设计 (5)3.3 绘制总体方案图 (5)4、机械传动部件的计算与选型 (6)4.1 导轨上移动部件的重量估算 (6)4.2 铣削力的计算 (6)5、直线滚动导轨副的计算与选型(纵向) (6)F的计算及导轨型号的选取5.1 块承受工作载荷max5.2 距离额定寿命L的计算6、滚珠丝杠螺母副的计算与选型 (7)6.1 最大工作载荷Fm的计算6.2 最大动工作载荷FQ的计算6.3 初选型号6.4 传动效率η的计算6.5 刚度的验算6.6 压杆稳定性校核7、步进电动机减速箱的选用 (9)8、步进电动机的计算与选型 (9)8.1 转矩的计算8.2.等效转动惯量的计算8.3速度的验算9、进给传动系统示图 (12)参考文献 (12)X-Y数控工作台机电系统设计1.引言:现代科学技术的不断发展,极大地推动了不同学科的交叉与渗透,导致了工程领域的技术革命与改造。
在机械工程领域,由于微电子技术和计算机技术的迅速发展及其向机械工业的渗透所形成的机电一体化,使机械工业的技术结构、产品机构、功能与构成、生产方式及管理体系发生了巨大变化,使工业生产由“机械电气化”迈入了“机电一体化”为特征的发展阶段。
X-Y数控工作台是许多机电一体化设备的基本部件,如数控车床的纵—横向进刀机构、数控铣床和数控钻床的X-Y工作台、激光加工设备的工作台、电子元件表面贴装设备等。
模块化的X-Y数控工作台,通常由导轨座、移动滑块、工作、滚珠丝杠螺母副,以及步进电动机等部件构成。
其中步进电动机做执行元件用来驱动滚珠丝杠,滚珠丝杠螺母带动滑块和工作平台在导轨上运动,完成工作台在X、Y方向的直线移动。
郑州大学现代远程教育毕业设计题目:双坐标十字滑台设计及控制入学年月__2013年9月_____________姓名__朱爱新________________学号_____________专业__机电一体化____________联系方式______________学习中心__邢台市________________指导教师________________________完成时间_2015_年_06_月_10_日目录目录 (1)第一章绪论 (2)1 .课程设计的目的和要求 (2)2 .课程设计的实施规则 (3)3 .课程设计过程及方式 (5)4 .时间安排及考核方法 (7)第二章课程设计内容 (10)1. 设计方案的确定 (10)2. 本次设计的主要内容 (11)3.设计步骤 (11)3(1).总体设计方案的选择及确定 (12)3(2).硬件设计 (12)3(3).软件设计 (13)第一章绪论1课程设计的目的和要求1、课程设计的目的课程设计是重要的教学环节之一,是学生将课堂教学知识用于实践的有效途径。
本次课程设计的核心目的是:通过对数控十字滑台控制部分的设计,使学生能够综合运用自己学过的微机原理及其接口技术、数控技术等专业课程知识,初步掌握单片机控制系统的设计原理、设计过程及应用,为后续的毕业设计与参加工作后的科研设计工作打下坚实基础。
2、本次设计的要求1.加深理解和掌握《机电一体化系统设计》这门专业课程的基本知识,提高学生综合运用所学知识的能力。
2.培养学生根据设计课题的需要,选用参考书、查阅有关工程手册的技术数据、图表和文献资料的能力,提高学生独立解决工程实际问题的能力。
3.设计方案的分析和比较、设计计算、元器件选择及电路设计等环节,初步掌握对有一定应用价值的小规模电路的设计方法。
4.学会对简单实用电路的设计方法,提高学生的设计能力。
5.了解与课题有关的电路以及元器件的工程设计规范,整理相关资料,按设计任务书的要求编写设计说明书和设计报告,正确反映设计和设计报告,正确绘制电气原理图和编制程序等。
十字滑台工作台技术要求
1. 结构设计
- 采用整体式焊接结构,保证工作台的刚性和稳定性。
- 底座采用重型钢板制造,提高抗震性和负载能力。
- 滑台导轨采用高精度滚珠丝杠副,确保运动精度和平稳性。
- 滑台驱动采用高精度伺服电机,实现高速高精度定位。
2. 运动性能
- /轴行程≥800,满足大型工件加工需求。
- 最大进给速度≥10/,提高生产效率。
- 重复定位精度≤±0.02,满足高精密加工要求。
- 最大承载≥500,适用于重型加工。
3. 人机界面
- 采用工业级触摸屏,操作简单直观。
- 支持代码编程,兼容多种加工软件。
- 具备手动/自动/单段/连续等多种运行模式。
- 具备报警诊断和故障自检功能,提高可靠性。
4. 安全保护
- 设有安全光栅,可自动检测危险区域,防止碰撞。
- 急停开关易于触及,确保紧急情况下快速停车。
- 具备机械手动解锁功能,方便维护保养。
- 采用防护罩,隔绝切屑和冷却液,保护主轴和滑台。
5. 附加功能
- 可选配自动工具更换系统,提高加工灵活性。
- 可选配自动对刀测量系统,简化对刀操作。
- 可选配冷却液循环系统,延长刀具使用寿命。
- 可选配工件自动上下料系统,实现自动化生产。
摘要随着世界进入现在代化科技文明至今,现代科学技术的不断发展,极大地推动了不同学科的交叉与渗透,导致了工程领域的技术革命与改造。
在近代工业上PLC的问世给所有工业部分带来飞跃的进步,人们利用PLC的优点改变传传统工业的控制技术,让工业实现真正的全自动化。
在人类文明至今机械工具不断的改进,到工业革命之后一次又一次的飞跃给现在所有科技生活等部分带来了翻天变化,就现在工业生产中十字滑台是最新科技领先的技术中的一个常应用的工业生产模块。
在科技不断地升级换代,世界各发达国家在各技术部分的技术水平已经非常成熟,然而我国在很多科技部门仍然是空缺众多。
就目前关于本文章的十字滑台的精确度就是目前我国一项重大空缺,所以本文章设计是关于如何利用PLC技术来实现十字滑台的更精确、更方便、更灵活,PLC的使用可以利用其优点来弥补我国在这些工业技术上的缺陷。
课题研究主要工作就是研究如何PLC编程进行对十字滑台的精确控制,十字滑台系统主要X轴方向滑台、Y轴方向滑台、X-Y轴定位及划线。
在设计中很多方面都涉及机械方面的机械滑轮和齿轮和自动化方面的PLC控制理论与程序以及相关学科的知识来实现十字滑台的电动机的运转,实现最终十字滑台的设计要求。
关键字:PLC、十字滑台、X轴、Y轴AbstractNow as the world entered the generation of the civilization of science and technology, the continuous development of modern science and technology, greatly promote the cross of different subjects and penetration, led to the revolution and reform in the field of engineering. In the advent of modern industrial PLC brings all the industrial part of leap progress, people of have a little change the traditional industrial control based on PLC technology, make industry to realize the real full automation.Machine tools of continual improvement, up to now in human civilization to leap again and again after the industrial revolution brought all technology such as part of life now proud of change, is now in the industrial production cross sliding table is one of the latest technology leading technology in the industrial production of commonly used modules.In science and technology constantly upgrading, the world's developed countries in the technical part of the technical level is already very mature, however in many departments of science and technology in our country is still many gaps. Now about the accuracy of the cross slide of this article is a big gap in our country at present, so this article design is about how to use PLC technology to realize the cross slide more accurate and more convenient, more flexible, the use of PLC can make use of its advantage to make up the defects of our country on the industrial technology.Research the main work is to study how to PLC programming for accurate control of cross sliding table, cross sliding table system main X axis direction slippery, Y direction slippery, x-y axis positioning and marking. In many aspects are involved in the design of machinery of pulleys and gears and automation of the theory and application of PLC control and related disciplines of knowledge to realize the cross slide motor operation, to eventually achieve cross slide design requirements.Key words: PLC, cross sliding table, the X axis and Y axis目录1、引言: (6)2、设计任务 (4)3、总体方案的确定 (4)3.1 机械传动部件的选择 (4)3.1.1导轨副的选用3.1.2丝杠螺母副的选用3.1.3减速装置的选用3.2 控制系统的设计 (5)3.3 绘制总体方案图 (5)4、机械传动部件的计算与选型 (6)4.1 导轨上移动部件的重量估算 (6)4.2 铣削力的计算 (6)5、直线滚动导轨副的计算与选型(纵向) (6)F的计算及导轨型号的选取5.1 块承受工作载荷max5.2 距离额定寿命L的计算6、滚珠丝杠螺母副的计算与选型 (7)6.1 最大工作载荷Fm的计算6.2 最大动工作载荷FQ的计算6.3 初选型号6.4 传动效率η的计算6.5 刚度的验算6.6 压杆稳定性校核7、步进电动机减速箱的选用 (9)8、步进电动机的计算与选型 (9)8.1 转矩的计算8.2.等效转动惯量的计算8.3速度的验算9、进给传动系统示图 (12)参考文献 (12)引言1.1课题来源自选课题:根据生产实际PLC在工业中的应用及十字滑台与PLC综合利用的发展前景选定了《PLC对十字滑台控制系统》这个设计课题。

三坐标十字滑台设计近年来,三坐标测量机在工业制造领域中得到了广泛应用。
而能够实现三轴平移和旋转的十字滑台,是三坐标测量中非常重要的一个重要组件。
三坐标十字滑台的设计需要很好地结合机械工程和数学力学的基本理论,不仅需要考虑精度和稳定性,还需要考虑生产成本和实际工作中的使用便捷性。
根据实际工作中的要求和特点,基本的设计要求包括以下方面:1. 滑轨结构:十字滑台的滑轨结构直接影响滑台的精度和稳定性,设计时需要考虑材料、加工工艺以及平衡性等方面。
滑轨的设计主要包括平面轴承、滚柱轴承和液压轴承等,这些都需要能够保证运动平稳而精度高。
2. 底座结构:底座是支撑十字滑台的基础,设计时需要考虑机床的整体结构以及运动时的稳定性。
底座结构包括多个部分,例如底板、底脚、底板支撑件等,这些都需要考虑结构的紧凑和稳定等问题。
3. 轴承结构:十字滑台的轴承结构是十分关键的组成部分,需要实现滑台的平稳运动、高精度和高稳定性,同时还需要满足高强度和高硬度的要求。
根据实际工作中的数据和精度要求,轴承结构包括滚珠轴承、针轮轴承和涡扇轴承等。
4. 驱动结构:驱动系统主要是为了让滑台进行移动和旋转。
在设计时,需要考虑速度、力量、准确度和效率等方面,因此驱动系统需要包含多个部件,例如驱动电机、传动控制件等。
具体选择哪一种驱动结构,需要根据不同工作场景来决定。
5. 刹车和制动系统:为了保证滑台运动的时稳定和安全,需要配备合适的刹车和制动系统。
刹车能够让滑台在停止运动时快速刹车停止,制动系统则能够保证滑台在运动时速度的稳定和高精度性。
总的来说,三坐标十字滑台的设计需要考虑多个方面的要求。
虽然要求比较高,但是只要在设计过程中融入各种理论和经验,严格按照标准要求来制作,就一定能够制造出一个高品质和高精度的十字滑台。
随着工业制造的发展和进步,相信三坐标十字滑台的设计和使用也将越来越广泛。
十字滑台设计方案
十字滑台是一种用于机械设备中的传动机构,常用于传动和变换力的方向。
十字滑台设计方案的核心目标是高效稳定地实现力的传递和方向的变换。
首先,在设计十字滑台时需要考虑力的传递效率。
为了提高传动效率,可以采用合适的传动比例,通过调整滑块和曲柄的尺寸来实现。
此外,为了减小传动过程中的损耗,可以采用摩擦小、传动效率高的材料,如光滑的金属表面或耐磨涂层。
其次,设计方案还需要保证十字滑台的稳定性。
为了实现稳定的力传递,可以在滑动面上增加适当的润滑剂,减少滑动面的磨损,确保机构的正常运转。
同时,还可以在滑块上增加抗滑设计,如齿轮刻痕或凹凸感应结构,以增加滑块与曲柄的接触面积,提高空间刚性和力的传递稳定性。
另外,设计方案还需要考虑十字滑台的耐磨性和寿命。
为了提高耐磨性,可以在滑动面上采用高硬度、耐磨损的材料,如硬质合金或刚玉。
此外,可以设计滑块和曲柄之间的间隙,以便通过调整间隙来延长滑动面的使用寿命,并保持正常的轴线和滑动面之间的相对位置。
最后,设计方案还需要考虑十字滑台的安全性。
可以在滑动面和传动部件上增加防护措施,如安全感应器、安全锁等,以防止意外事故的发生。
此外,还可以通过优化机构结构和材料的选择来减小设备的噪音和振动,提高操作的舒适性和安全性。
总的来说,十字滑台设计方案需要综合考虑传动效率、稳定性、耐磨性和安全性等多个因素。
通过合理选择材料、尺寸和结构,以及增加相应的防护装置,可以实现十字滑台的高效、稳定和安全运行。
十字滑台制作方法十字滑台是一种常见的机械结构,用于实现平面运动。
它由一个底座和一个移动平台组成,移动平台可以在垂直和水平方向上相对于底座进行滑动。
十字滑台广泛应用于工业自动化、实验室设备、医疗器械等领域。
本文将介绍十字滑台的制作方法。
一、材料准备制作十字滑台需要准备以下材料:1. 铝合金板:用于制作底座和移动平台的框架结构,具有轻质、高强度和耐腐蚀的特点。
2. 线性导轨:用于实现移动平台在垂直方向上的滑动,选择合适尺寸和质量的线性导轨。
3. 滑块:与线性导轨配套使用,用于支撑和引导移动平台的滑动。
4. 螺杆及导轨:用于实现移动平台在水平方向上的滑动,选择适合的螺杆和导轨组合。
5. 电机及控制器:用于驱动螺杆实现平台的水平滑动,选择适合的电机和控制器。
6. 联轴器及连接件:用于连接电机和螺杆,确保传动效果和稳定性。
7. 螺栓、螺母和垫片:用于固定和连接各个部件,选择合适尺寸和材质的螺栓、螺母和垫片。
二、制作步骤1. 制作底座:根据需要的尺寸和形状,将铝合金板切割成相应的形状,并进行打磨和抛光处理,确保表面光滑平整。
2. 安装线性导轨:将线性导轨固定在底座上,使用螺栓、螺母和垫片进行固定,确保导轨与底座紧密连接。
3. 安装滑块:将滑块安装在线性导轨上,确保滑块能够顺畅滑动,并且稳定支撑移动平台。
4. 制作移动平台框架:根据需要的尺寸和形状,将铝合金板切割成相应的形状,并进行打磨和抛光处理,确保表面光滑平整。
5. 安装螺杆及导轨:将螺杆和导轨固定在移动平台框架上,使用螺栓、螺母和垫片进行固定,确保螺杆与导轨垂直,并且能够顺畅滑动。
6. 安装电机及控制器:将电机固定在底座上,使用联轴器将电机与螺杆连接起来,安装控制器进行电机的控制和调节。
7. 连接底座和移动平台:使用螺栓、螺母和垫片将底座和移动平台框架连接起来,确保连接紧固牢固,同时保持移动平台的水平平稳滑动。
三、调试和测试完成十字滑台的制作后,需要进行调试和测试,确保其正常工作和稳定性。
目 录1绪论 (1)1.1课程设计的背景 (1)1.2课程设计的目的和意义 (1)1.3双坐标十字滑台的技术指标及主要内容 (1)1.3.1技术指标 (1)1.3.2主要内容 (1)2双坐标十字滑台整体结构设计 (2)2.1总体方案确定 (2)2.2滚珠丝杠的设计 (3)2.2.1计算载荷C F (3)2.2.2计算额定动载荷a C ' (3)2.2.3根据a C '选择滚珠丝杠副 (3)2.2.4稳定性验算 (4)2.2.5刚度验算 (5)2.2.6效率验算 (6)2.2.7丝杠的消隙 (6)2.3滚珠丝杠的固定端选择 (6)2.4滚动导轨 (6)2.5步进电机的选择 (7)2.5.1步距角的确定 (7)2.5.2减速器传动比计算 (7)2.5.3电动机轴上总当量负载转动惯量计算 (8)2.5.4惯量匹配验算 (8)2.5.5步进电动机负载能力校验 (8)2.6减速器参数设计 (11)2.6.1选定齿轮类型、精度等级、材料及齿数 (11)2.6.2按齿面接触疲劳强度设计 (11)2.6.3轴承的选择 (12)2.6.4联轴器的选择 (12)3双坐标十字滑台控制系统设计 (13)3.1设计目的 (13)3.2设计任务 (13)3.3设计步骤 (14)3.4数控编程及电气控制部分设计过程 (14)3.4.1总体设计方案的选择及确定 (14)3.4.2硬件控制电路设计 (14)3.4.3软件设计 (15)3.5程序清单 (21)3.5.1显示子程序 (21)3.5.2键盘子程序设计 (22)3.5.3中断 (25)3.5.4主程序设计 (27)4心得体会 (28)5参考文献 (30)1绪论1.1课程设计的背景机电一体化系统是综合多个学科的系统,包括机械技术,传感器技术,测试技术,电子技术和控制技术,信息与计算机技术。
它极大推动了机械工业,兵器行业及其他行业的发展。
其技术结构,产品结构,技术功能与构成,生产方式和管理体系均发生了巨大的变化。


三轴十字滑台创新设计说明书目录1 绪论 (1)1.1设计目的 (1)1.2设计要求 (1)2 总体设计 (2)2.1传动分析 (2)2.2方案设计 (3)2.3对比分析 (8)2.4最终方案 (8)3 详细设计 (9)3.1电机功率 ................................................. 错误!未定义书签。
03.2传动系统设计 (9)3.3控制部分 ................................................... 错误!未定义书签。
3.4其他 ........................................................... 错误!未定义书签。
4 零部件清单 (12)5工艺设计 (13)5.1轴加工工艺 (13)5.2板料 (13)5.3轴承座 (14)6制造与装配 (16)6.1 轴加工 (16)6.2轴承座 (16)6.3装配 (16)7存在的问题 (18)7.1 存在的问题 (20)7.2 解决办法 (19)8总结 (20)9参考文献 (21)10附件 (23)1 绪论十字滑台是指由两组直线滑台按照X轴方向和Y轴方向组合而成的组合滑台,通常也称为坐标轴滑台、XY轴滑台。
工业上常常以横向表示X轴,另一个轴向就是Y轴。
X轴的中点与Y轴重合时,外观上看起来是中文中的“十”字,十字滑台的名称也由此而来。
1.1设计目的普通市场上的十字滑台无法满足多方位移动,我们便设计出一款多方位移动的三轴十字滑台模型。
十字滑台可适用于:激光焊接机、插线机、打孔机、涂胶机、机械手、搬运、检测装置、大型数控机床或者教学领域。
工件的定位、夹紧、搬运、插入、等产能自动化及喷涂业、点胶、涂胶、封胶、移栽、装配、检测、切割、数码科技产品、电子行业、畜牧业、医疗纺织业和自动化行业中。
1.2设计要求(1)工作台进给运动采用滚珠丝杠螺母结构。
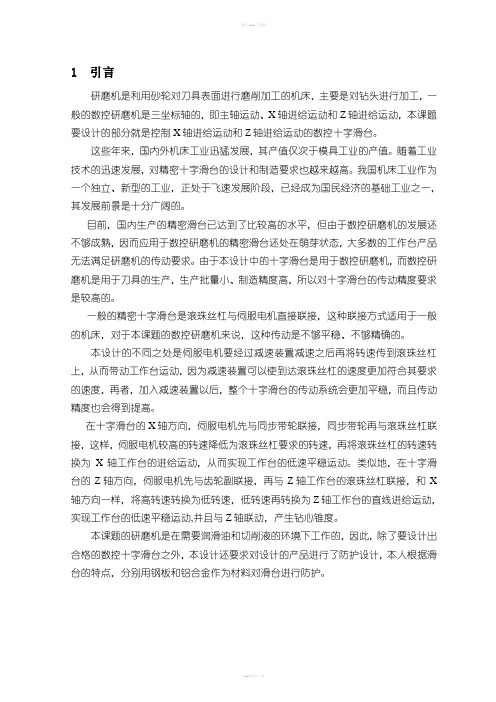
1引言研磨机是利用砂轮对刀具表面进行磨削加工的机床,主要是对钻头进行加工,一般的数控研磨机是三坐标轴的,即主轴运动、X轴进给运动和Z轴进给运动,本课题要设计的部分就是控制X轴进给运动和Z轴进给运动的数控十字滑台。
这些年来,国内外机床工业迅猛发展,其产值仅次于模具工业的产值。
随着工业技术的迅速发展,对精密十字滑台的设计和制造要求也越来越高。
我国机床工业作为一个独立、新型的工业,正处于飞速发展阶段,已经成为国民经济的基础工业之一,其发展前景是十分广阔的。
目前,国内生产的精密滑台已达到了比较高的水平,但由于数控研磨机的发展还不够成熟,因而应用于数控研磨机的精密滑台还处在萌芽状态,大多数的工作台产品无法满足研磨机的传动要求。
由于本设计中的十字滑台是用于数控研磨机,而数控研磨机是用于刀具的生产,生产批量小、制造精度高,所以对十字滑台的传动精度要求是较高的。
一般的精密十字滑台是滚珠丝杠与伺服电机直接联接,这种联接方式适用于一般的机床,对于本课题的数控研磨机来说,这种传动是不够平稳、不够精确的。
本设计的不同之处是伺服电机要经过减速装置减速之后再将转速传到滚珠丝杠上,从而带动工作台运动,因为减速装置可以使到达滚珠丝杠的速度更加符合其要求的速度,再者,加入减速装置以后,整个十字滑台的传动系统会更加平稳,而且传动精度也会得到提高。
在十字滑台的X轴方向,伺服电机先与同步带轮联接,同步带轮再与滚珠丝杠联接,这样,伺服电机较高的转速降低为滚珠丝杠要求的转速,再将滚珠丝杠的转速转换为X轴工作台的进给运动,从而实现工作台的低速平稳运动。
类似地,在十字滑台的Z轴方向,伺服电机先与齿轮副联接,再与Z轴工作台的滚珠丝杠联接,和X 轴方向一样,将高转速转换为低转速,低转速再转换为Z轴工作台的直线进给运动,实现工作台的低速平稳运动,并且与Z轴联动,产生钻心锥度。
本课题的研磨机是在需要润滑油和切削液的环境下工作的,因此,除了要设计出合格的数控十字滑台之外,本设计还要求对设计的产品进行了防护设计,本人根据滑台的特点,分别用钢板和铝合金作为材料对滑台进行防护。
目录1.序言 (2)2.技术要求 (2)2.1 设计题目 (2)2.2 技术数据 (2)2.3 设计要求 (2)3.总体结构设计 (2)3.1 丝杠选取 (3)3.1.1 计算动载荷 (3)3.2 滚珠丝杠副的选取 (4)3.2.1计算载荷 (4)3.2.2根据Ca选择滚珠丝杠副 (4)3.2.3计算额定动载荷计算值Ca (4)3.2.4滚珠丝杠副校核 (5)3.3稳定性运算 (5)3.3.1计算临界转速n (5)K3.3.2压杆稳定性计算 (6)3.4 滚动导轨 (6)3.4.1计算行程长度寿命 Ts (6)3.4.2计算动载荷C………………………………………………………6、j3.5 选取电机 (8)3.5.1 电机的初选 (8)3.5.2 步进电机转动的校核 (8)4.结语 (11)5.参考文献 (11)1.序言X-Y数控工作台机电系统设计是一个开环控制系统,其结构简单。
实现方便而且能够保证一定的精度。
降低成本,是微机控制技术的最简单的应用。
它充分的利用了危机的软件硬件功能以实现对机床的控制;使机床的加工范围扩大,精度和可靠性进一步得到提高。
X-Y数控工作台机电系统设计是利用8031单片机,及2764,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能。
其基本思想是:通过圆弧或者直线插补程序以实现对零件进行几何加工,每进行一段加工都要产生一定的脉冲以驱动电机正反转,同时通过8155(1)将相应的加工进刀信息送至刀架库中以实现以之相应的走刀,电机和刀具的相对运动所以实现了刀具对工件的加工。
该控制系统采用软件中断控制系统结构及子程序结构简单,条件明确在经济型数控中应用较多。
中断结构采用模块化结构设计因为这种结构便于修改和扩充,编制较为方便,便于向多处理方向发展。
X-Y数控工作台机电系统设计采用步进电机作为驱动装置。
步进电机是一个将脉冲信号转移成角位移的机电式数模转换器装置。
其工作原理是:每给一个脉冲便在定子电路中产生一定的空间旋转磁场;由于步进电机通的是三相交流电所以输入的脉冲数目及时间间隔不同,转子的旋转快慢及旋转时间的长短也是不同的。
由于旋转磁场对放入其中的通电导体既转子切割磁力线时具有力的作用,从实现了旋转磁场的转动迫使转子作相应的转动,所以转子才可以实现转子带动丝杠作相应的运动。
本题目是步进电机,微型计算机,插补原理,汇编语言的综合应用,本题目设计得到了老师的帮助和支持,最后由关英俊老师审定,在此表示感谢。
因本人水平有限,错误和不足之处在所难免,处理问题也有不妥之处,敬请相关老师批评指正。
2.技术要求2.1设计题目:X-Y双坐标联动数控工作台设计2.2技术数据工作台长 宽(mm):410*310工作台重量(N):2300N脉冲当量: 0.005~0.008mm/P2.3设计要求:(1)工作台进给运动采用滚珠丝杠螺结构(2)滚珠丝杠支撑方式:双推—简支型(3)驱动电机为反应式步进电机(4)步进电机与滚珠丝杠间采用齿轮降速要求消除齿轮间隙3.总体结构设计数控工作台采用由步进电机驱动的开环控制结构,其单向驱动系统结构简图如图所示:实际设计的工作台为X 、Y 双坐标联动工作台,工作台是由上拖板、中拖板、下拖板及导轨、滚珠丝杠等组成.其中下拖板与床身固联,它上面固定X 向导轨,中拖板在下拖板的导轨上横向运动,其上固定Y 向导轨,上拖板与工作台固联,在Y 向导轨上移动.X 、Y 导轨方向互相垂直。
.3.1滚珠丝杠选取滚珠螺旋传动按滚动体循环方式分为外循环和内循环两类,其中应用较广的是插管式和螺旋槽式,它们各有特点,其轴向间隙的调整方法主要有垫片调隙式和螺纹调隙式。
滚珠丝杠传动副多为专业厂家生产,一般用户设计时只负责选用,在选用时主要验算其额定动载荷和临界转速,丝杠较长时还应进行压杆稳定性验算。
3.1.1计算动载荷Cj )(3/1N F K K L C a H F j ⨯⨯⨯=4.1=F K (表1)1.1=H K (表2)取丝杠转速:n=100r/min轴向载荷:N F F a 2352300*101972.0≈==μ 使用寿命:T=15000h 则额定寿命:h nTL 9010606==所以动载荷N C j 76.12632350.12.19031≈⨯⨯⨯= 所以滚珠丝杠型号为:BSS1204滚珠丝杠 精度等级C7表1 表2载荷性质 F K平稳或轻度冲击1~1.2轻度冲击1.2~1.5较大冲击、振动 1.5~2.5表3类别 普通机械 普通机床 数控、精密机械T(h) 5000~1000010000150003.2滚珠丝杠副的选取 3.2.1计算载荷.Fc=K F *K H *K A *F a查<<机电一体化设计基础》表2—6取,K F =1.3 查表2—7 取K H =1.0 查表2—4 取D 级精度 查表2—8 取 K A =1.0 取平均工作载荷F a =235N 则 Fc=1.2*1.0*1.0*235=282N3.2.2计算额定动载荷计算值Can=100r/min使用寿命T=15000h L=60n *610T =660*100*1500010=90h N TnF C mc a 1241*67.115000*100*282*67.1*34341010≈==3.2.3根据Ca 选择滚珠丝杠副根据《机电一体化设计基础》,滚珠丝杠副额定动载荷Ca 等于或者大于Ca 的原则,选用得丝杠副数据:公称直径:(中径d 2)D 0=12mm 导程:P=4mm滚珠直径:d 0=2.3812mm实际硬度HRCH K≥55 1.1 ≥50 1.56 ≥45 2 .4 ≥403.85根据《机电一体化设计基础》表2-1中公式得: 螺纹滚道半径:R=0.52* d 0=0.52*2.3812=1.238mm偏心距:e=0.707(R- d 0/2)=0.707*(1.238-2.3812/2)=0.0335 丝杠内径d1=D0+2e-2R=12+2*0.0335-2*1.238=9.591mm3.2.4滚珠丝杠副校核滚珠丝杠副还要受D 0*n 的值的限制,通常要求D 0*n<7*104mmr/minD 0*n=12*100=1200mm*r/min<7*104mm*r/min 所以 丝杠副工作稳定3.3稳定性运算3.3.1计算临界转速 K n2219910*(*)fc d nk l μ= (r/min ) 式中fc —临界转速系数 见表4 μ—长度系数 见表4d 1—丝杠内径 (m)l —丝杠工作长度 (m)因为工作台y 向长度为310mm 可知y 向临界转速最大min /34029)1031067.0(10591.993.399102332r n k =⨯⨯⨯⨯⨯=-- min /10000max r n =因为n k >n max 所以丝杠工作时不会发生共振表 4支承方式 系数 双推—自由双推—简支两端固定c f 1.88 3.93 4.73μ2 0.67 ——3.3.2压杆稳定性计算F K =22()EIal πμ (N ) 式中 F K —临界载荷E —材料弹性模量 对于钢,E=2.06×1110PaIa —丝杠危险截面惯性矩 Ia=m491002.1-⨯临界载荷F cr1=N 996431.0*67.010*02.1*10*06.2*14.39112≈-F cr2=N1473921.0*67.010*02.1*10*06.2*14.39112≈-安全系数安全系数错误!未找到引用源。
F cr1〈F cr233.423009964≈==FF mcr S [错误!未找到引用源。
=2.5~3.3 []S S >=33.4丝杠安全,不失稳。
丝杠绝对安全,不会失稳。
丝杠选取无误,即选用BSS1204型滚珠丝杠。
3.4滚动导轨导轨是工作台系统的重要组成部分,由于滚动导轨具有定位精度高、低速无爬行、移动轻便等显著优点,故本工作台系统设计选用滚动导轨.滚动导轨应用最广的是滚珠导轨,按滚珠的循环方式分类,滚珠导轨又可分为滚珠不循环式和可循环式.在专业厂家生产的标准化滚动导轨中,都为滚动体可循环式,本次导轨设计的主要任务是根据负载情况选用标准化滚动导轨,在选用过程中,主要进行额定载荷验算.3.4.1计算行程长度寿命 TsTs=2Ls ·n ·60·Th/1000 (km)式中 Ls —工作单行程长度(m) m L sx 31.0= m L sy 21.0= n —往复次数 (次/min) min)/(645.013.02004.01002次≈⨯⨯==sx x L np n min)/(952.021.02004.01002次≈⨯⨯==sy y L np n Th —工作时间寿命 (h):h T h 15000=行程长度寿命:km T sx 91.3591000/)1500060645.031.02(=⨯⨯⨯⨯= km T sy 856.3591000/)1500060952.021.02(=⨯⨯⨯⨯=3.4.2计算动载荷 j Cj C =Hc T s w f f f m k T f F ⋅⋅⋅⋅⋅3/1)/(式中 F —作用在滑座上的载荷 (N)M —滑座个数 K —寿命系数f T —温度系数 见表5 f C —接触系数 见表6 f H —硬度系数 见表7f W —负载系数 见表8表5 表6表7表8Tf、cf 、Hf、wf分别由指导书表5,6,7,8查得Tf=1.0,cf=1.0,Hf=1.0,wf=1.8另取滑座个数 m=4寿命系数一般取k=50(km) 作用在滑座上载荷F=2300N工作温度(0C )T f <100 1100~150 0.9 150~200 0.7 200~250 0.6 每根导轨上滑块数 c f1 12 0.813 0.724 0.66滚道表面硬HRC60 58 55 53 50 45 f H10.980.90.710.540.38工作条件fw 无冲击、振动 V<15m/min 1~1.5 较小冲击、振动V<60m/min 1.5~2 较大冲击、振动V>60m/min 2~3.5∴N m K F ff f T f C HCTSj 19990.1*0.1*0.1*450360*8.1*2300***33≈==ω 故选取滚动导轨型号为35D HJG -3.5选取电机3.5.1电机的初选ti ⋅⋅δα0360= (度)式中 δ—工作台脉冲当量 (mm/P) 6006.0 =δ i —传动系统传动比 i=2t —滚珠丝杠导程 (mm) t=4mm︒=⨯⨯2.1426006.03600 =α 由设计指导书附录三初选型号为110BF003 由机电一体化设计基础图5-33、5-34查的 减速器采用1级传动 传动比分别为21=i 各传动齿轮齿数为: Z1=20 Z2=40 模数m=2 齿轮宽b=20mm3.5.2步进电机转矩校核由机电一体化设计基础书中式5-36分别计算各传动件的转动惯量,其中齿轮交叉直径取分度圆直径:mm m d Z 4020*2*11=== mm m d Z 8040*2*22=== 丝杠长度取L=600mm ∴324Ld p J ***=π2543110*9.33202.0*04.0*10*8.7*m kg J z ∙≈=-π2443210*3.63202.0*08.0*10*8.7*m kg J z ∙≈=-π26431008.53232.0*012.0*10*8.7*m kg J s ∙⨯≈=-π242645222110*04.2250*)226006.0()10*08.510*3.6(4110*9.3)2()(1m kg m ip J J i J J S z z d ∙=⨯⨯+++=+++=----ππ取电动机轴自身转动惯量2310*48.3m kg J m ∙=-则步进电动机轴的总转动惯量:44410*52.510*04..210*48.3---=+=+=d m J J J 设步进电机空载启动时间为25ms ,最大进给速度:min /0.1max m V = 导轨摩擦系数1.0=υ空载启动时,电动机轴的惯性转矩:mN t p V i J f W J T T j ∙≈⨯⨯⨯⨯⨯⨯⨯⨯=∆***⨯=∆⨯==--69.06010250067.01214.321052.5)/()2(/34max max πς电动机轴上的当量摩擦转矩:m N i pmg ipF T ∙≈===153.02*8.0*14.3*21.0*2300*0067.022πημπημμ 其中伺服进给链的总效率8.0=η设滚珠丝杠螺母副的与预紧力为最大轴向载荷的1/3,则因预紧力而引起,而折算到电动机轴上的附加摩擦转矩为:m N i pF i pF T w o ∙⨯=⨯⨯⨯⨯-⨯⨯=-=-=-103220max 2007.9328.014.32)9.01(2300067.032)1(2)1(πηηπηη其中9.00=η工作台的最大轴向负载折算到电动机轴上的负载转矩: m N i pF T w w ∙≈⨯⨯⨯⨯==153.028.014.322300067.02max πη 则电动机空载启动时电动机轴总的负载转矩:m N T T T T j q ∙=++=++=8527.00097.0153.069.00μ电动机轴上的总负载转矩为:m N T T T T og∙=++=++=3197.0153.00097.0153.0ωμ电动机最大静转矩Ts按空载启动计算:空载启动上所需电动机最大静转矩 m N c T T q s ∙===99.0866.08527.01 C=0.866 由下表可查电机相数 3 456运行拍数3648 5 10 6 12 C0.5 0.866 0.7070.7070.8090.9510.8660.866按正常工作计算:在最大外载荷下工作时所需要电动机最大静转矩: m N T T g s ∙===78925.04.03197.04.02 Ts 取二者大的,故Ts=0.99﹤[Ts] 步进电机的最大静转矩满足要求 频率校核参考电动机的转矩—频率特性曲线原则:选用步进电机应使实际应用的启动频率,运行频率与负载转矩所对应的启动,运行工作点位于该曲线之下,才能保证步进电机不失频的正常工作。