第10章典型光电测试系统讲解
- 格式:ppt
- 大小:877.00 KB
- 文档页数:40
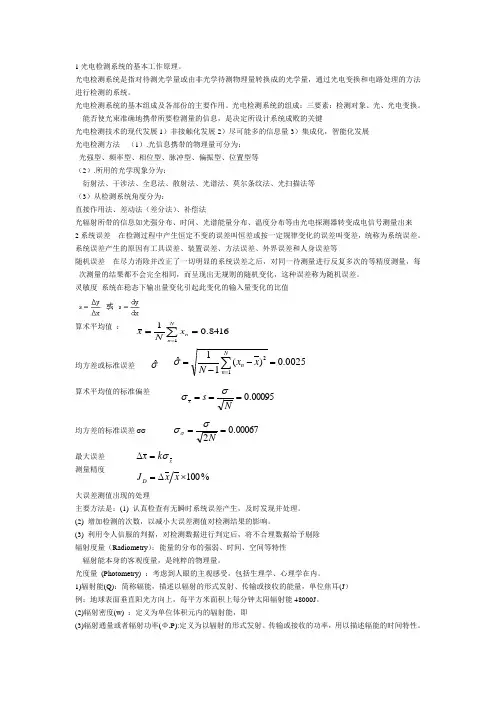
1光电检测系统的基本工作原理。
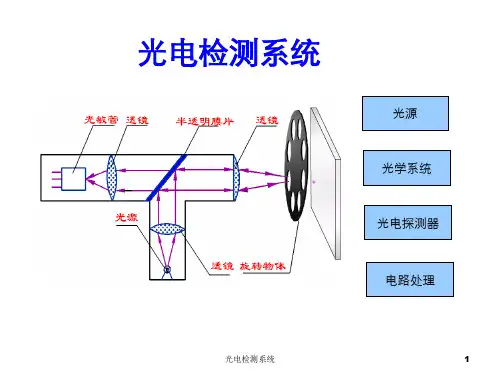
光电检测系统是指对待测光学量或由非光学待测物理量转换成的光学量,通过光电变换和电路处理的方法进行检测的系统。
光电检测系统的基本组成及各部份的主要作用。
光电检测系统的组成:三要素:检测对象、光、光电变换。
能否使光束准确地携带所要检测量的信息,是决定所设计系统成败的关键光电检测技术的现代发展1)非接触化发展2)尽可能多的信息量3)集成化,智能化发展光电检测方法 (1).光信息携带的物理量可分为:光强型、频率型、相位型、脉冲型、偏振型、位置型等(2).所用的光学现象分为:衍射法、干涉法、全息法、散射法、光谱法、莫尔条纹法、光扫描法等(3)从检测系统角度分为:直接作用法、差动法(差分法)、补偿法光辐射所带的信息如光强分布、时间、光谱能量分布、温度分布等由光电探测器转变成电信号测量出来2系统误差 在检测过程中产生恒定不变的误差叫恒差或按一定规律变化的误差叫变差,统称为系统误差。
系统误差产生的原因有工具误差、装置误差、方法误差、外界误差和人身误差等随机误差 在尽力消除并改正了一切明显的系统误差之后,对同一待测量进行反复多次的等精度测量,每次测量的结果都不会完全相同,而呈现出无规则的随机变化,这种误差称为随机误差。
灵敏度 系统在稳态下输出量变化引起此变化的输入量变化的比值算术平均值 :均方差或标准误差算术平均值的标准偏差均方差的标准误差σσ最大误差测量精度大误差测值出现的处理主要方法是:(1) 认真检查有无瞬时系统误差产生,及时发现并处理。
(2) 增加检测的次数,以减小大误差测值对检测结果的影响。
(3) 利用令人信服的判据,对检测数据进行判定后,将不合理数据给予剔除辐射度量(Radiometry ):能量的分布的强弱、时间、空间等特性辐射能本身的客观度量,是纯粹的物理量。
光度量 (Photometry) :考虑到人眼的主观感受,包括生理学、心理学在内。
1)辐射能(Q):简称辐能,描述以辐射的形式发射、传输或接收的能量,单位焦耳(J )例:地球表面垂直阳光方向上,每平方米面积上每分钟太阳辐射能48000J 。

光电检测系统原理光电检测系统是一种常用的传感器,广泛应用于自动化控制领域,例如机械加工、纺织、食品处理、生物化学和医疗卫生等。
其原理是利用光电器件将光信号转换为电信号,通过电路处理后,将电信号转换成机械或其他可控制的信号,实现自动检测和控制。
本文将从光电器件、处理电路、应用领域等方面进行详细介绍。
一、光电器件光电器件是光电检测系统的核心部分,其主要功能是将光信号转化为电信号,其种类包括光敏二极管(PD)、光电二极管(PH)、光励磁二极管(PC)、光电晶体管(PT)、硅光电池(PD)等。
其中,PD是一种光敏半导体器件,应用范围十分广泛。
PD中的光信号通过PN结被掺杂之后,使之成为具有光电特性的二极管,根据入射光信号的强弱,PD产生的电流也随之变化。
PH、PC、PT相比PD更加敏感,其检测范围可以覆盖可见光和红外光谱区域,使用时需要更加谨慎,但其具有相对较高的灵敏度和更快的响应速度,可以满足更高的应用需求。
硅光电池具有较高的光电转换效率,但其使用条件较为苛刻,易受温度变化等环境因素影响。
二、处理电路处理电路是光电检测系统中的第二个核心部分,主要功能是对从光电器件收集的电信号进行处理和放大,以满足后续电路的工作需要。
处理电路一般分为前端电路和后端电路两大部分。
(一)前端电路前端电路是光电检测系统中的第一级信号处理电路,主要由前放电路、驱动电路、滤波电路和保护电路组成。
前放电路的作用是放大从光电器件获得的弱电信号;驱动电路是用于对光电器件进行驱动的电路,使其在有效频率范围内工作;滤波电路则可以用来滤除杂乱的高频或低频信号;最后,保护电路则可以将前端电路和后端电路隔离,防止过高电压或过电流对后续模块造成损害。
(二)后端电路后端电路是对前端电路处理后的信号进行进一步处理和放大的电路,主要由比较电路、微处理器、放大电路、输出电路、计时电路和显示电路组成。
后端处理电路可以根据应用需要设置不同的模块,例如可通过比较电路可以实现对输入信号的阈值比较,以触发输出信号;在微处理器中可以设置一定的软件算法,用于对信号进行更加复杂的处理。

光电测量系统课程设计一、教学目标本节课的教学目标是让学生掌握光电测量系统的基本原理和应用方法。
知识目标包括了解光电测量系统的工作原理、掌握光电测量系统的组成及特点、了解光电测量技术在工程中的应用。
技能目标包括能够运用光电测量系统进行基本测量操作、能够分析测量数据并得出合理结论。
情感态度价值观目标包括培养学生对光电测量技术的兴趣和好奇心、培养学生勇于探索和实践的精神。
二、教学内容本节课的教学内容主要包括光电测量系统的基本原理、组成及特点、应用方法。
首先,介绍光电测量系统的工作原理,使学生了解光电测量系统的工作机制。
其次,讲解光电测量系统的组成及特点,使学生掌握光电测量系统的主要组成部分及其功能。
然后,通过具体案例分析,使学生了解光电测量技术在工程中的应用。
最后,通过实际操作,让学生学会使用光电测量系统进行基本测量操作。
三、教学方法为了实现本节课的教学目标,将采用多种教学方法相结合的方式进行教学。
首先,采用讲授法,向学生讲解光电测量系统的基本原理、组成及特点。
其次,采用讨论法,引导学生探讨光电测量技术在工程中的应用。
然后,采用案例分析法,让学生通过分析具体案例,深入了解光电测量技术在实际工程中的应用。
最后,采用实验法,让学生亲自动手操作光电测量系统,巩固所学知识。
四、教学资源为了支持本节课的教学内容和教学方法的实施,将选择和准备以下教学资源。
教材:《光电测量技术与应用》;参考书:《现代光电测量技术》;多媒体资料:光电测量系统的工作原理及应用案例;实验设备:光电测量系统实验装置。
这些教学资源将有助于丰富学生的学习体验,提高学生的学习效果。
五、教学评估为了全面、客观地评估学生的学习成果,将采用多种评估方式相结合的方法。
平时表现方面,将观察学生在课堂上的参与程度、提问回答等情况,并进行记录。
作业方面,将布置与课堂内容相关的练习题,要求学生在规定时间内完成,并根据作业质量进行评分。
考试方面,将安排一次课程结束后的闭卷考试,试题将涵盖本节课的全部内容。
1光电检测系统的基本工作原理。
光电检测系统是指对待测光学量或由非光学待测物理量转换成的光学量,通过光电变换和电路处理的方法进行检测的系统。
光电检测系统的基本组成及各部份的主要作用。
光电检测系统的组成:三要素:检测对象、光、光电变换。
能否使光束准确地携带所要检测量的信息,是决定所设计系统成败的关键光电检测技术的现代发展1)非接触化发展2)尽可能多的信息量3)集成化,智能化发展光电检测方法 (1).光信息携带的物理量可分为:光强型、频率型、相位型、脉冲型、偏振型、位置型等(2).所用的光学现象分为:衍射法、干涉法、全息法、散射法、光谱法、莫尔条纹法、光扫描法等(3)从检测系统角度分为:直接作用法、差动法(差分法)、补偿法光辐射所带的信息如光强分布、时间、光谱能量分布、温度分布等由光电探测器转变成电信号测量出来2系统误差 在检测过程中产生恒定不变的误差叫恒差或按一定规律变化的误差叫变差,统称为系统误差。
系统误差产生的原因有工具误差、装置误差、方法误差、外界误差和人身误差等随机误差 在尽力消除并改正了一切明显的系统误差之后,对同一待测量进行反复多次的等精度测量,每次测量的结果都不会完全相同,而呈现出无规则的随机变化,这种误差称为随机误差。
灵敏度 系统在稳态下输出量变化引起此变化的输入量变化的比值算术平均值 :均方差或标准误差算术平均值的标准偏差均方差的标准误差σσ最大误差测量精度大误差测值出现的处理主要方法是:(1) 认真检查有无瞬时系统误差产生,及时发现并处理。
(2) 增加检测的次数,以减小大误差测值对检测结果的影响。
(3) 利用令人信服的判据,对检测数据进行判定后,将不合理数据给予剔除辐射度量(Radiometry ):能量的分布的强弱、时间、空间等特性辐射能本身的客观度量,是纯粹的物理量。
光度量 (Photometry) :考虑到人眼的主观感受,包括生理学、心理学在内。
1)辐射能(Q):简称辐能,描述以辐射的形式发射、传输或接收的能量,单位焦耳(J )例:地球表面垂直阳光方向上,每平方米面积上每分钟太阳辐射能48000J 。