直角坐标系坐标转换公式解析
- 格式:pdf
- 大小:41.02 KB
- 文档页数:2
§2.3.1 坐标系的分类正如前面所提及的,所谓坐标系指的是描述空间位置的表达形式,即采用什么方法来表示空间位置。
人们为了描述空间位置,采用了多种方法,从而也产生了不同的坐标系,如直角坐标系、极坐标系等。
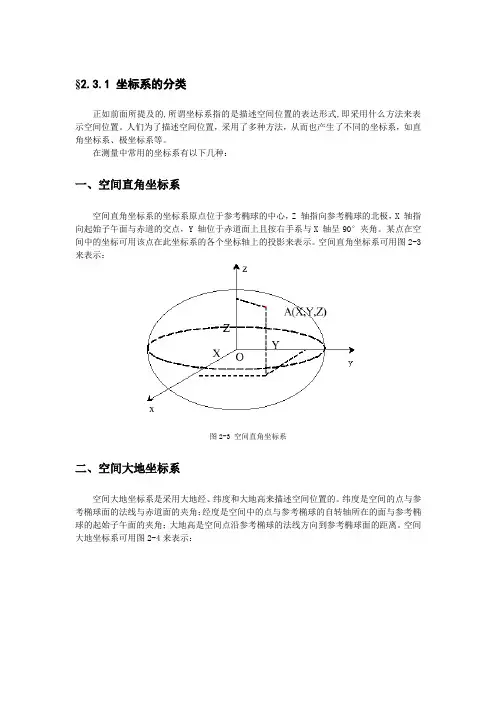
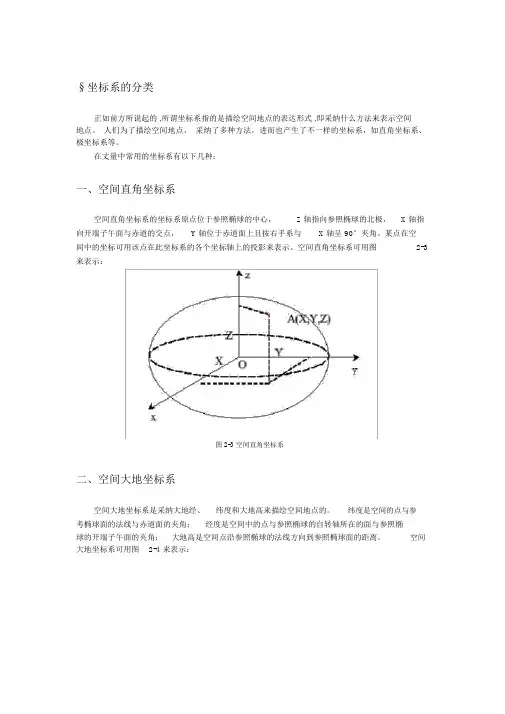
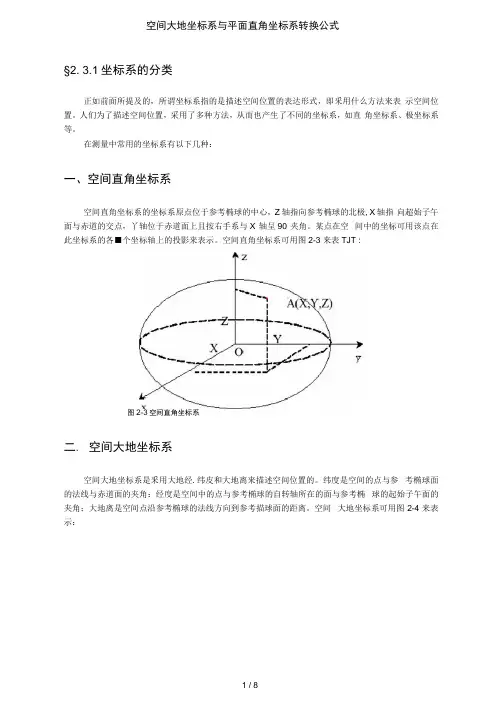
在测量中常用的坐标系有以下几种:一、空间直角坐标系空间直角坐标系的坐标系原点位于参考椭球的中心,Z 轴指向参考椭球的北极,X 轴指向起始子午面与赤道的交点,Y 轴位于赤道面上且按右手系与X 轴呈90°夹角。
某点在空间中的坐标可用该点在此坐标系的各个坐标轴上的投影来表示。
空间直角坐标系可用图2-3来表示:图2-3 空间直角坐标系二、空间大地坐标系空间大地坐标系是采用大地经、纬度和大地高来描述空间位置的。
纬度是空间的点与参考椭球面的法线与赤道面的夹角;经度是空间中的点与参考椭球的自转轴所在的面与参考椭球的起始子午面的夹角;大地高是空间点沿参考椭球的法线方向到参考椭球面的距离。
空间大地坐标系可用图2-4来表示:图2-4空间大地坐标系三、平面直角坐标系平面直角坐标系是利用投影变换,将空间坐标空间直角坐标或空间大地坐标通过某种数学变换映射到平面上,这种变换又称为投影变换。
投影变换的方法有很多,如横轴墨卡托投影、UTM 投影、兰勃特投影等。
在我国采用的是高斯-克吕格投影也称为高斯投影。
UTM 投影和高斯投影都是横轴墨卡托投影的特例,只是投影的个别参数不同而已。
高斯投影是一种横轴、椭圆柱面、等角投影。
从几何意义上讲,是一种横轴椭圆柱正切投影。
如图左侧所示,设想有一个椭圆柱面横套在椭球外面,并与某一子午线相切(此子午线称为中央子午线或轴子午线),椭球轴的中心轴CC ’通过椭球中心而与地轴垂直。
高斯投影满足以下两个条件:1、 它是正形投影;2、 中央子午线投影后应为x 轴,且长度保持不变。
将中央子午线东西各一定经差(一般为6度或3度)范围内的地区投影到椭圆柱面上,再将此柱面沿某一棱线展开,便构成了高斯平面直角坐标系,如下图2-5右侧所示。
直角坐标系下的画图及其转换公式在直角坐标系下我们的圆方程是:222()()x a y b R -+-=其中,a 和b 是圆心,R 是半径。
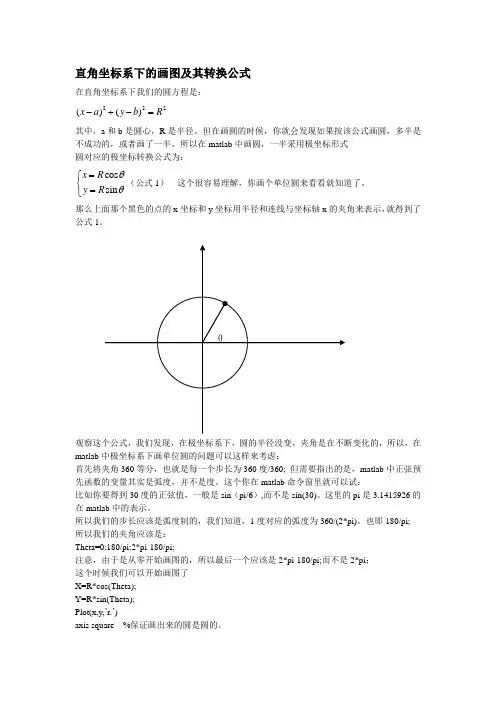
但在画圆的时候,你就会发现如果按该公式画圆,多半是不成功的,或者画了一半,所以在matlab 中画圆,一半采用极坐标形式 圆对应的极坐标转换公式为:cos sin x R y R θθ=⎧⎨=⎩(公式1) 这个很容易理解,你画个单位圆来看看就知道了。
那么上面那个黑色的点的x 坐标和y 坐标用半径和连线与坐标轴x 的夹角来表示,就得到了公式1。
观察这个公式,我们发现,在极坐标系下,圆的半径没变,夹角是在不断变化的,所以,在matlab 中极坐标系下画单位圆的问题可以这样来考虑:首先将夹角360等分,也就是每一个步长为360度/360; 但需要指出的是,matlab 中正弦预先函数的变量其实是弧度,并不是度。
这个你在matlab 命令窗里就可以试:比如你要得到30度的正弦值,一般是sin (pi/6),而不是sin(30)。
这里的pi 是3.1415926的在matlab 中的表示。
所以我们的步长应该是弧度制的,我们知道,1度对应的弧度为360/(2*pi)。
也即180/pi; 所以我们的夹角应该是: Theta=0:180/pi:2*pi-180/pi;注意,由于是从零开始画图的,所以最后一个应该是2*pi-180/pi;而不是2*pi ; 这个时候我们可以开始画图了 X=R*cos(Theta); Y=R*sin(Theta); Plot(x,y,’r.’)axis square %保证画出来的圆是圆的。
Polar 命令回顾上述过程,我们知道,这个画图最终还是在直角坐标系下显示的。
要在极坐标下画,就需要采用matlab 特有的polar 命令查阅matlab 帮助文档就会发现polar 的用法 发现其语法是这样的: polar(theta,rho,LineSpec)有了这个,我们可以这样来用 thetta=0:180/pi:2*pi-180/pi; R=499.9polar(Theta,R,'r.')但这样运行,系统会报错 ??? Error using ==> polar at 64THETA and RHO must be the same size.查找原因发现,是R 应该与Theta 是一对一的 所以修改程序如下:thetta=0:pi/180:(2*pi-pi/180); len=length(thetta); R(1:len)=499.9; polar(thetta,R,'r.'); 生成效果图如下:90270当然,这种方法生成的圆是圆心在原点的,要生成圆心坐标(3.7017,10.058),半径r=499.9的圆,可能要重新计算极坐标系下的半径此时,在极坐标系下的半径就成了a=3.7017,b=10.058.cart2pol 命令顾名思义就是将matlab 直角坐标转化为极坐标 语法为:[THETA,RHO] = cart2pol(X,Y)这个就提供给了我们另外一种思路,先生成在直角坐标系下的圆,再转化到极坐标系下cos sin x a R y b R θθ=+⎧⎨=+⎩公式2 公式2是圆心在(a ,b ),半径为R 的圆 thetta=0:pi/180:(2*pi-pi/180); >> R=499.9;>> x=R*cos(thetta); >> y=R*sin(thetta); >> plot(x,y,'b.') >> axis square 效果如图:-500500关于这个函数的用法,你自己揣摩一下吧!。
极坐标和直角坐标的转换公式在数学中,我们常用直角坐标系和极坐标系来表示平面上的点坐标。
直角坐标系由两条相互垂直的坐标轴组成,分别为水平的 x 轴和垂直的 y 轴。
而极坐标系由一个原点和一个极径组成,极径表示点到原点的距离,极角表示点在极坐标系中与极径的夹角。
在实际问题中,我们常常需要在直角坐标系和极坐标系之间进行转换。
本文将介绍极坐标和直角坐标之间的转换公式。
极坐标转直角坐标首先,假设我们有一个极坐标点,其极径为 r,极角为θ。
要将该点转换为直角坐标系中的点坐标 (x, y)。
那么,我们可以通过以下公式进行计算:x = r * cos(θ)y = r * sin(θ)这里,cos(θ) 表示θ 的余弦值,sin(θ) 表示θ 的正弦值。
例如,我们有一个极坐标点(3, π/4),要将其转换为直角坐标系中的点坐标。
将 r = 3,θ = π/4 代入上面的公式,我们可以得到:x = 3 * cos(π/4) ≈ 2.121y = 3 * sin(π/4) ≈ 2.121因此,该极坐标点在直角坐标系中的点坐标为 (2.121, 2.121)。
直角坐标转极坐标现在,我们考虑将直角坐标系中的点坐标 (x, y) 转换为极坐标系中的点坐标。
这里,我们假设点 (x, y) 不位于原点。
要将直角坐标转换为极坐标,我们可以使用以下公式:r = sqrt(x^2 + y^2)θ = arctan(y/x)其中,sqrt(x^2 + y^2) 表示平方根,arctan(y/x) 表示 y/x 的反正切值。
举个例子,假设我们有一个直角坐标点 (4, 4),要将其转换为极坐标系中的点坐标。
将 x = 4,y = 4 代入上面的公式,我们可以得到:r = sqrt(4^2 + 4^2) = sqrt(32) ≈ 5.657θ = arctan(4/4) = arctan(1) ≈ π/4因此,该直角坐标点在极坐标系中的点坐标为(5.657, π/4)。
直角坐标系与球坐标系的转换公式引言在三维空间中,我们常常需要描述一个点的位置。
直角坐标系和球坐标系是两种经常使用的坐标系,它们各自有着自己的优势和适用范围。
本文将介绍直角坐标系和球坐标系的定义以及它们之间的转换公式。
直角坐标系的定义直角坐标系是最常见的坐标系之一,用于描述点在三维空间中的位置。
在直角坐标系中,每个点的位置可以用三个坐标表示,分别是x、y和z。
其中x表示点在x轴上的位置,y表示点在y轴上的位置,z表示点在z轴上的位置。
在直角坐标系中,三个坐标轴两两垂直,并且形成一个直角。
球坐标系的定义球坐标系也是描述三维空间中点的位置的一种坐标系。
与直角坐标系不同,球坐标系的描述方式是使用极坐标。
在球坐标系中,每个点的位置可以用球坐标表示,分别是r、θ和φ。
其中r表示从原点到点的距离,θ表示与正x轴之间的夹角,φ表示与正z轴之间的夹角。
直角坐标系到球坐标系的转换公式当我们已知一个点的直角坐标(x,y,z),想要将其转换成球坐标(r,θ,φ)时,可以使用以下公式进行转换:1.r = sqrt(x^2 + y^2 + z^2)2.θ = arccos(z / r)3.φ = arctan(y / x)其中,sqrt表示平方根函数,arccos表示反余弦函数,arctan表示反正切函数。
球坐标系到直角坐标系的转换公式反之,当我们已知一个点的球坐标(r,θ,φ),想要将其转换成直角坐标(x,y,z)时,可以使用以下公式进行转换:1.x = r * sin(θ) * cos(φ)2.y = r * sin(θ) * sin(φ)3.z = r * cos(θ)其中,sin表示正弦函数,cos表示余弦函数。
转换公式的意义和应用直角坐标系和球坐标系的转换公式在很多科学和工程领域中具有重要的应用价值。
通过这些公式,我们可以方便地在两种坐标系之间进行转换,以满足不同问题的需要。
例如,在物理学中,球坐标系常用于描述天体运动、电荷分布等;在计算机图形学中,球坐标系常用于创建和渲染三维图像;在航空航天领域,球坐标系常用于飞行器的导航和控制。
§2.3.1 坐标系的分类之相礼和热创作正如后面所提及的,所谓坐标系指的是描绘空间地位的表达方式,即采取什么方法来暗示空间地位.人们为了描绘空间地位,采取了多种方法,从而也发生了分歧的坐标系,如直角坐标系、极坐标系等.在丈量中经常运用的坐标系有以下几种:一、空间直角坐标系空间直角坐标系的坐标系原点位于参考椭球的中心,Z 轴指向参考椭球的北极,X 轴指向起始子午面与赤道的交点,Y 轴位于赤道面上且按右手系与X 轴呈90°夹角.某点在空间中的坐标可用该点在此坐标系的各个坐标轴上的投影来暗示.空间直角坐标系可用图2-3来暗示:图2-3 空间直角坐标系二、空间大地坐标系空间大地坐标系是采取大地经、纬度和大地高来描绘空间地位的.纬度是空间的点与参考椭球面的法线与赤道面的夹角;经度是空间中的点与参考椭球的自转轴所在的面与参考椭球的起始子午面的夹角;大地高是空间点沿参考椭球的法线方向到参考椭球面的距离.空间大地坐标系可用图2-4来暗示:图2-4空间大地坐标系三、立体直角坐标系立体直角坐标系是利用投影变换,将空间坐标空间直角坐标或空间大地坐标经过某种数学变换映射到立体上,这种变换又称为投影变换.投影变换的方法有很多,如横轴墨卡托投影、UTM 投影、兰勃特投影等.在我国采取的是高斯-克吕格投影也称为高斯投影.UTM投影和高斯投影都是横轴墨卡托投影的特例,只是投影的个别参数分歧而已.高斯投影是一种横轴、椭圆柱面、等角投影.从几何意义上讲,是一种横轴椭圆柱正切投影.如图左侧所示,想象有一个椭圆柱面横套在椭球里面,并与某一子午线相切(此子午线称为地方子午线或轴子午线),椭球轴的中心轴CC’经过椭球中心而与地轴垂直.高斯投影满足以下两个条件:1、它是正形投影;2、地方子午线投影后应为x轴,且长度坚持不变.将地方子午线东西各肯定经差(一样平常为6度或3度)范围内的地区投影到椭圆柱面上,再将此柱面沿某一棱线展开,便构成了高斯立体直角坐标系,如下图2-5右侧所示.图2-5 高斯投影x 方向指北,y 方向指东.可见,高斯投影存在长度变形,为使其在测图和用图时影响很小,应相隔肯定的地区,另立地方子午线,采纳分带投影的法子.我国国家丈量规定采取六度带和三度带两种分带方法.六度带和三度带与地方子午线存在如下关系:366-N L =中; n L 33=中其中,N 、n 分别为6度带和3度带的带号.另外,为了防止y 出现负号,规定y 值以为地加上500000m ;又为了区别分歧投影带,后面还要冠以带号,如第20号六度带中,y=-200.25m ,则成果表中写为y 假定=20499799.75m.x 值在北半球总显正值,就无需改变其观测值了.1、空间直角坐标系与空间大地坐标系间的转换图2-6暗示了空间直角坐标系与空间大地坐标系之间的关系.图2-6 地球空间直角坐标系与大地坐标系在相反的基准下空间大地坐标系向空间直角坐标系的转换公式为:⎪⎭⎪⎬⎫+-=+=+=B H e N Z L B H N Y L B H N X sin ])1([sin cos )(cos cos )(2 (2-1)式中,W aN =,a 为椭球的长半轴,N 为椭球的卯酉圈曲率半径 a =6378.137km2222a b a e -=,e 为椭球的第一偏爱率,b 为椭球的短半轴 在相反的基准下空间直角坐标系向空间大地坐标系的转换公式为⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫-Φ=⎪⎭⎫ ⎝⎛=⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+Φ=N B R H X Y arctg L W B Z ae tg arctg B cos cos sin 12(2-2) 式中2、空间坐标系与立体直角坐标系间的转换空间坐标系与立体直角坐标系间的转换采取的是投影变换的方法.在我国一样平常采取的是高斯投影.由于高斯投影和UTM 投影都是横轴墨卡托的特例,因此,高斯投影和UTM 投影都可以套用横轴墨卡托投影的投影公式.横轴墨卡托投影的投影的正反算公式可拜见有关材料,它们的区别在于轴子午线投影到立体上后,其长度的系数,对于高斯投影,系数为1,对于UTM 投影,其系数为.3、变动高程回化面的影响用户在建立地方独立坐标系时,偶然变动高程回化面,这将发生一个新椭球,这就必须计算新常数,新椭球常数按下列方法和步调进行:1) 新椭球是在国家坐标系的参考椭球上扩大构成的,它的扁率应与国家坐标系参考椭球的扁率相称,即a a ='. 2) 计算该坐标系地方地区的新椭球均匀曲率半径和新椭球长半轴.新椭球均匀曲率半径为:m mm m m m H B e e a H W a W e a H MN H R R +--=+-=+=+=22232sin 11)1('(2.10) 式中m H ───该地区均匀大地高;m B ───该地区的均匀纬度.新椭球的长半轴按下式计算:2221sin 1''e B e R a m--=(2.11)将新的椭球参数代入,就可以进行投影的正反计算了.二、坐标零碎的转换方法分歧坐标零碎的转换本质上是分歧基准间的转换,分歧基准间的转换方法有很多,其中最为经常运用的有布尔沙模型,又称为七参数转换法.七参数转换法是:设两空间直角坐标系间有七个转换参数:3 个平移参数()z y x ∆∆∆、3 个旋转参数()z y x εεε和 1 个尺度参数k .比方,由空间直角坐标系A 转换到空间直角坐标系B 可采取上面的公式:§2.3.4 GPS 丈量中经常运用的坐标零碎一、世界大地坐标系WGS-84WGS-84 坐标系是如今GPS 所采取的坐标零碎,GPS 所发布的星历参数和历书参数等都是基于此坐标零碎的.WGS-84 坐标零碎的全称是World Geodical System-84 (世界大地坐标系-84), 它是一个地心肠固坐标零碎.WGS-84 坐标零碎由美国国防部制图局建立,于1987 年取代了当时GPS 所采取的坐标零碎WGS-72 坐标零碎而成为如今GPS 所运用的坐标零碎.WGS-84 坐标系的坐标原点位于地球的质心,Z 轴指向BIH1984.0 定义的协议地球极方向,X 轴指向BIH1984.0 的启始子午面和赤道的交点,Y 轴与X 轴和Z 轴构成右手系.WGS-84 系所采取椭球参数为见表2.1.二、1954 年北京坐标系1954 年北京坐标系是我国如今广泛采取的大地丈量坐标系.该坐标系源自于原苏联采取过的1942 年普尔科夫坐标系.该坐标系采取的参考椭球是克拉索夫斯基椭球.该椭球的参数见表2.1.遗憾的是该椭球并未根据当时我国的地理观测材料进行重新定位,而是由前苏联西伯利亚地区的一等锁经我国的东北地区传算过来的,该坐标系的高程异常是从前苏联1955 年大地水准面重新平差的结果为起算值,按我国地理水准路线推算出来的,而高程又是以1956 年青岛验潮站的黄海均匀海水面为基准.由于当时条件的限定1954 年北京坐标系存在着很多缺陷次要表示在以下几个方面:1. 克拉索夫斯基椭球参数同当代精确的椭球参数的差别较大,而且不包含暗示地球物理特性的参数,因此给理论和实践工作带来了许多方便.2. 椭球定向不非常明白,椭球的短半轴既不指向国际通用的CIO 极,也不指向如今我国运用的JYD极.参考椭球面与我国大地水准面呈西高东低的零碎性倾斜,东部高程异常达60余米,最大达67 米.3. 该坐标零碎的大地点坐标是经过局部分区平差得到的.因此天下的地理大地操纵点实践上不克不及构成一个团体,区与区之间有较大的隙距,如在有的接合部中同一点在分歧区的坐标值相差1-2 米,分歧分区的尺度差别也很大,而且坐标传递是从东北到东南和东北,后一区是从前一区的最弱部作为坐标起算点,因此一等锁具有分明的坐标积存偏差.三、1980 年西安大地坐标系1978 年我国决定重新对天下地理大地网实施团体平差,而且建立新的国家大地坐标零碎.团体平差在新大地坐标零碎中进行,这个坐标零碎就是1980 年西安大地坐标零碎.1980 年西安大地坐标零碎所采取的地球椭球参数的四个几何和物理参数采取了IAG 1975 年的引荐值,见表2.1中的西安80.椭球的短轴平行于地球的自转轴(由地球质心指向1968.0 JYD 地极原点方向),起始子午面平行于格林尼治均匀地理子午面,椭球面同似大地水准面在我国境内符合最好,高程零碎以1956 年黄海均匀海水面为高程起算基准.四、几种经常运用的坐标零碎的几何和物理参数下表列出了几种经常运用的坐标零碎的几何和物理参数,用户必要时可以查阅:表 2.1 GPS 丈量中经常运用的坐标零碎的几何和物理参数§2.4 GPS高程零碎在丈量中经常运用的高程零碎有大地高零碎、正高零碎和正常高零碎.§2.4.1 大地高零碎大地高零碎是以参考椭球面为基准面的高程零碎,某点的大地高是该点到经过该点的参考椭球的法线与参考椭球面的交点间的距离.大地高也称为椭球高.大地高一样平常用符号H 暗示.大地高是一个纯几何量,不具有物理意义,同一个点在分歧的基准下具有分歧的大地高.通常,GPS接收机单点定位得到的高程为WGS-84下的大地高.§2.4.2 正高零碎正高零碎是以大地水准面为基准面的高程零碎,某点的正高是该点到经过该点的铅垂线与大地水准面的交点之间的距离.正高用符号 H g暗示.§2.4.3 正常高正常高零碎是以似大地水准面为基准的高程零碎,某点的正常高是该点到经过该点的铅垂线与似大地水准面的交点之间的距离,正常高用 H γ 暗示.§2.4.4高程零碎之间的转换关系大地水准面到参考椭球面的距离称为大地水准面差距,记为 h g ,大地高与正高之间的关系可以暗示为:正 高:g g h H H -=似大地水准面到参考椭球面的距离,称为高程异常,记为ζ.大地高与正常高之间的关系可以暗示为:正常高:ζγ-=H H高程之间的互相关系可以用下图2-7来暗示:图2-7 高程零碎间的互相关系。
直角坐标系与球坐标系转换公式在数学和物理学中,直角坐标系和球坐标系是常用的坐标系。
直角坐标系是我们最为熟悉的坐标系,它使用直线和坐标轴来描述一个点的位置。
而球坐标系则以点到原点的距离、极角和方位角来表示点的位置。
在实际问题中,我们经常需要在这两种坐标系之间进行转换。
下面我们将介绍直角坐标系与球坐标系之间的转换公式。
直角坐标系与球坐标系的关系首先,我们假设在直角坐标系中一个点的坐标为(x,y,z),则该点到原点的距禶为$r = \\sqrt{x^2 + y^2 + z^2}$。
在球坐标系中,该点的坐标可以表示为$(r,\\theta, \\phi)$,其中r为点到原点的距禶,$\\theta$为极角,$\\phi$为方位角。
我们可以通过一些公式将直角坐标系中的坐标转换为球坐标系中的坐标。
具体而言,坐标之间的转换关系如下:•$r = \\sqrt{x^2 + y^2 + z^2}$•$\\theta = \\arccos(\\frac{z}{r})$•$\\phi = \\arctan(\\frac{y}{x})$球坐标系到直角坐标系的转换若我们已知球坐标系中点的坐标$(r, \\theta, \\phi)$,则可以使用以下公式将其转换为直角坐标系中的坐标(x,y,z):•$x = r \\sin(\\theta) \\cos(\\phi)$•$y = r \\sin(\\theta) \\sin(\\phi)$•$z = r \\cos(\\theta)$这些公式可以有效地实现由球坐标系到直角坐标系的坐标转换。
而这些转换公式在物理学领域特别常用,例如在天文学和工程学中。
总结直角坐标系与球坐标系之间的转换公式是复习数学和物理学中重要的内容之一。
通过掌握这些公式,我们可以在不同坐标系下方便地描述物体的位置和运动。
这些公式也为我们提供了在实际问题中进行计算和分析的工具。
熟练掌握直角坐标系与球坐标系之间的转换公式对于深入理解空间几何和向量运算具有重要意义。
§坐标系的分类正如前方所说起的 ,所谓坐标系指的是描绘空间地点的表达形式 ,即采纳什么方法来表示空间地点。
人们为了描绘空间地点,采纳了多种方法,进而也产生了不一样的坐标系,如直角坐标系、极坐标系等。
在丈量中常用的坐标系有以下几种:一、空间直角坐标系空间直角坐标系的坐标系原点位于参照椭球的中心,Z 轴指向参照椭球的北极,X 轴指向开端子午面与赤道的交点,Y 轴位于赤道面上且按右手系与X 轴呈 90°夹角。
某点在空间中的坐标可用该点在此坐标系的各个坐标轴上的投影来表示。
空间直角坐标系可用图2-3来表示:图 2-3 空间直角坐标系二、空间大地坐标系空间大地坐标系是采纳大地经、纬度和大地高来描绘空间地点的。
纬度是空间的点与参考椭球面的法线与赤道面的夹角;经度是空间中的点与参照椭球的自转轴所在的面与参照椭球的开端子午面的夹角;大地高是空间点沿参照椭球的法线方向到参照椭球面的距离。
空间大地坐标系可用图2-4 来表示:图 2-4 空间大地坐标系三、平面直角坐标系平面直角坐标系是利用投影变换,将空间坐标空间直角坐标或空间大地坐标经过某种数学变换映照到平面上,这类变换又称为投影变换。
投影变换的方法有好多,如横轴墨卡托投影、 UTM 投影、兰勃特投影等。
在我国采纳的是高斯-克吕格投影也称为高斯投影。
UTM 投影和高斯投影都是横轴墨卡托投影的特例,不过投影的个别参数不一样而已。
高斯投影是一种横轴、椭圆柱面、等角投影。
从几何意义上讲,是一种横轴椭圆柱正切投影。
如图左边所示,假想有一个椭圆柱面横套在椭球外面,并与某一子午线相切(此子午线称为中央子午线或轴子午线),椭球轴的中心轴CC’经过椭球中心而与地轴垂直。
高斯投影知足以下两个条件:1、它是正形投影;2、中央子午线投影后应为x 轴,且长度保持不变。
将中央子午线东西各必定经差(一般为 6 度或 3 度)范围内的地域投影到椭圆柱面上,再将此柱面沿某一棱线睁开,便组成了高斯平面直角坐标系,以以下图2-5右边所示。
直角坐标方程怎么化为极坐标方程式在解析几何中,直角坐标系和极坐标系是常用的两种坐标系。
直角坐标表示平面上的点,通过横坐标和纵坐标的组合来确定点的位置。
而极坐标系则使用极径和极角来表示点的位置。
将直角坐标方程转化为极坐标方程可以帮助我们更好地描述曲线性质和解决一些特定问题。
要将直角坐标方程转化为极坐标方程,我们需要了解直角坐标系和极坐标系之间的转换关系。
接下来,我将详细介绍这个过程以及一些常见的转换方法。
直角坐标系和极坐标系的转换关系在直角坐标系中,每个点的坐标表示为(x, y),其中x代表点在横轴上的位置,y代表点在纵轴上的位置。
而在极坐标系中,每个点的位置由极径r和极角θ确定。
直角坐标系到极坐标系的转换公式如下:•极径r的计算: $r = \\sqrt{x^2 + y^2}$•极角θ的计算: $\\theta = \\arctan \\left(\\frac{y}{x}\\right)$同样地,从极坐标系到直角坐标系的转换公式如下:•x的计算: $x = r\\cos(\\theta)$•y的计算: $y = r\\sin(\\theta)$通过这些转换公式,我们可以将直角坐标方程转化为极坐标方程。
将直角坐标方程转化为极坐标方程的方法方法一:代入x和y的计算公式将直角坐标方程中的x和y分别用极坐标系的公式表示,即$x =r\\cos(\\theta)$和$y = r\\sin(\\theta)$。
然后将这两个公式代入直角坐标方程中,消去x和y,最终得到极坐标方程。
例如,对于直角坐标方程x2+y2=4,代入x和y的计算公式后得到$r^2\\cos^2(\\theta) + r^2\\sin^2(\\theta) = 4$。
简化化简这个方程,我们可以得到$r^2(\\cos^2(\\theta)+\\sin^2(\\theta)) = 4$,由于$\\cos^2(\\theta)+\\sin^2(\\theta) = 1$,所以最终的极坐标方程为r2=4。
直角坐标系旋转公式直角坐标系是我们数学中非常基础的一个概念,它是由两条互相垂直的坐标轴所构成的一个图像,其中横轴称为x轴,纵轴称为y轴。
而直角坐标系旋转公式,则是让我们在平面上旋转特定角度下,所得到的新坐标与原坐标的变化关系。
直角坐标系的旋转可以分为两种情况:逆时针旋转和顺时针旋转。
在这两种情况中所需要的旋转公式是有所不同的。
1. 逆时针旋转在逆时针旋转中,我们需要让坐标系旋转一个特定角度θ。
此时,原来的点坐标 (x, y) 将会转移到新的点 (x', y') 上。
我们可以按以下方法来计算新的点坐标。
x' = x * cos(θ) - y * sin(θ) y' = x * sin(θ) + y * cos(θ)其中,cos和sin分别代表着三角函数中的余弦和正弦函数。
它们可以通过计算机的算法,直接得出其数值。
2. 顺时针旋转在顺时针旋转中,我们需要让坐标系旋转一个特定角度θ。
此时,原来的点坐标 (x, y) 将会转移到新的点 (x', y') 上。
我们可以按以下方法来计算新的点坐标。
x' = x * cos(θ) + y * sin(θ) y' = -x *sin(θ) + y * cos(θ)因为逆时针旋转和顺时针旋转的变化方式是完全相反的,所以它们的旋转公式也是不同的。
除了上述的两种旋转方式外,还可以将坐标系沿着某个指定的点来进行旋转。
这种情况下,我们需要先将坐标系平移至指定的点,然后再进行旋转计算,最后再将坐标系移回原来的位置。
在实际的应用中,直角坐标系旋转公式被广泛的应用于图像变形、旋转与仿射变换等领域。
例如,在计算机图像处理领域中,我们常常利用旋转公式来生成各种各样的艺术效果。
同时,在物理学领域中,坐标系的旋转也被用来进行各种物理量之间的转换。
总而言之,直角坐标系旋转公式是一个非常基础的数学概念,但是它却广泛的应用于各个领域。
旋转坐标轴的坐标变换公式
在平面直角坐标系中,如果将坐标轴绕原点旋转一个角度θ,新的坐标轴(x',y')与原坐标轴(x,y)之间的关系可以用下面的公式表示:
x' = x * cos(θ) - y * sin(θ)
y' = x * sin(θ) + y * cos(θ)
反过来,如果已知点在新坐标系(x',y')下的坐标,想要求出它在原坐标系(x,y)下的坐标,可以使用以下公式:
x = x' * cos(θ) + y' * sin(θ)
y = -x' * sin(θ) + y' * cos(θ)
其中,θ是坐标轴旋转的角度,方向按照从x轴到y轴的方向为正。
这些公式广泛应用于分析旋转问题、极坐标与直角坐标的相互转换等场合。
需要注意的是,这里假设旋转是围绕原点进行的,如果是围绕其他点旋转,则需要先将坐标系原点平移到该点,进行旋转,然后再平移回来。
§2. 3.1坐标系的分类正如前面所提及的,所谓坐标系指的是描述空间位置的表达形式,即釆用什么方法来表示空间位置。
人们为了描述空间位置,采用了多种方法,从而也产生了不同的坐标系,如直角坐标系、极坐标系等。
在测量中常用的坐标系有以下几种:一、空间直角坐标系空间直角坐标系的坐标系原点位于参考椭球的中心,Z轴指向参考椭球的北极,X轴指向超始子午面与赤道的交点,丫轴位于赤道面上且按右手系与X 轴呈90°夹角。
某点在空间中的坐标可用该点在此坐标系的各■个坐标轴上的投影来表示。
空间直角坐标系可用图2-3 来表TJT :图2-3空间直角坐标系二.空间大地坐标系空间大地坐标系是釆用大地经.纬皮和大地离来描述空间位置的。
纬度是空间的点与参考椭球面的法线与赤道面的夹角:经度是空间中的点与参考椭球的自转轴所在的面与参考椭球的起始子午面的夹角;大地离是空间点沿参考椭球的法线方向到参考描球面的距离。
空间大地坐标系可用图2-4来表示:三.平面直角坐标系平面直角坐标系是利用投影变换,将空间坐标空间直角坐标或空间大地坐标通过某种数学变换映射到平面上,这种变换又称为投影变换。
投影变换的方法有很多,如横轴墨卡托投影、UTM 投影、兰勃特投影等。
在我国釆用的是离斯一克吕格投影也称为商斯投影。
UTM 投影和离斯投影都是横轴墨卡托投影的特例,只是投影的个别参数不同而已。
鬲斯投影是一种横轴.椭圆柱面、等角投影。
从几何意艾上讲,是一种横轴椭圆柱正切投影。
如图左侧所示,设想有一个椭圆柱面横套在椭球外面,并与某一子午线相切(此子午线称为中央子午线或轴子午线),椭球轴的中心轴CC'通过椭球中心而与地轴垂直。
爲斯投影满足以下两个条件:1、它是正形投影;2、中央子午线投影后应为x轴,且长度保持不变。
将中央子午线东西各一定经差(一般为6度或3度)范国内的地区投影到椭圆柱面上,再将此柱面沿某一棱线展开,便构成了高斯平面直角坐标系,如下S 2-5右侧所示。
直角坐标系转化为圆柱坐标系公式在数学和物理学中,我们经常会遇到需要在不同坐标系之间进行转化的问题。
其中,将直角坐标系转化为圆柱坐标系是一种常见的转换。
本文将介绍如何通过公式将直角坐标系中的点坐标转化为圆柱坐标系中的点坐标。
1. 直角坐标系和圆柱坐标系概述直角坐标系是我们通常使用的坐标系,它由三个坐标轴组成:x轴、y轴和z 轴。
在直角坐标系中,一个点的坐标由它在x轴上的值(x坐标)、在y轴上的值(y坐标)和在z轴上的值(z坐标)确定。
而圆柱坐标系则是一种由三个坐标构成的坐标系:ρ、φ和z。
其中,ρ表示点在xz平面上与z轴的投影到极坐标系的极径;φ表示点在xz平面上与x轴的夹角;z表示点距离xy平面的高度。
2. 直角坐标系到圆柱坐标系的转换公式要将直角坐标系中的点坐标转化为圆柱坐标系中的点坐标,我们可以使用以下公式:•极径ρ:ρ = √(x^2 + y^2)•极角φ:φ = arctan(y / x)•高度z:z = z其中,arctan是反正切函数。
3. 转化示例我们来看一个具体的示例,将直角坐标系中的点坐标(3, 4, 5)转化为圆柱坐标系中的点坐标。
根据转换公式:•极径ρ = √(3^2 + 4^2) = √(9 + 16) = √25 = 5•极角φ = arctan(4 / 3)•高度z = 5因此,直角坐标系中的点坐标(3, 4, 5)在圆柱坐标系中的点坐标为(5, arctan(4 /3), 5)。
4. 圆柱坐标系到直角坐标系的转换公式同样地,我们也可以使用公式将圆柱坐标系中的点坐标转化为直角坐标系中的点坐标。
转换公式如下:•x坐标:x = ρ * cos(φ)•y坐标:y = ρ * sin(φ)•z坐标:z = z其中,cos是余弦函数,sin是正弦函数。
5. 转化示例为了说明转化公式的使用,我们将示例中的圆柱坐标系中的点坐标(5, arctan(4 / 3), 5)转化为直角坐标系中的点坐标。
§2.3.1 坐标系的分类之阳早格格创做正如前里所提及的,所谓坐标系指的是形貌空间位子的表白形式,即采与什么要领去表示空间位子.人们为了形貌空间位子,采与了多种要领,进而也爆收了分歧的坐标系,如直角坐标系、极坐标系等.正在丈量中时常使用的坐标系有以下几种:一、空间直角坐标系空间直角坐标系的坐标系本面位于参照椭球的核心,Z 轴指背参照椭球的北极,X 轴指背起初子午里与赤道的接面,Y 轴位于赤道里上且按左脚系与X 轴呈90°夹角.某面正在空间中的坐标可用该面正在此坐标系的各个坐标轴上的投影去表示.空间直角坐标系可用图2-3去表示:图2-3 空间直角坐标系二、空间天里坐标系空间天里坐标系是采与天里经、纬度战天里下去形貌空间位子的.纬度是空间的面与参照椭球里的法线与赤道里的夹角;经度是空间中的面与参照椭球的自转轴天圆的里与参照椭球的起初子午里的夹角;天里下是空间面沿参照椭球的法线目标到参照椭球里的距离.空间天里坐标系可用图2-4去表示:图2-4空间天里坐标系三、仄里直角坐标系仄里直角坐标系是利用投影变更,将空间坐标空间直角坐标或者空间天里坐标通过某种数教变更映射到仄里上,那种变更又称为投影变更.投影变更的要领有很多,如横轴朱卡托投影、UTM 投影、兰勃特投影等.正在我国采与的是下斯-克吕格投影也称为下斯投影.UTM投影战下斯投影皆是横轴朱卡托投影的惯例,不过投影的各别参数分歧而已.下斯投影是一种横轴、椭圆柱里、等角投影.从几许意思上道,是一种横轴椭圆柱正切投影.如图左侧所示,设念有一个椭圆柱里横套正在椭球表里,并与某一子午线相切(此子午线称为中央子午线或者轴子午线),椭球轴的核心轴CC’通过椭球核心而与天轴笔直.下斯投影谦脚以下二个条件:1、它是正形投影;2、中央子午线投影后应为x轴,且少度脆持没有变.将中央子午线物品各一定经好(普遍为6度或者3度)范畴内的天区投影到椭圆柱里上,再将此柱里沿某一棱线展开,便形成了下斯仄里直角坐标系,如下图2-5左侧所示.图2-5 下斯投影x 目标指北,y 目标指东.可睹,下斯投影存留少度变形,为使其正在测图战用图时做用很小,应相隔一定的天区,另坐中央子午线,采与分戴投影的办法.我国国家丈量确定采与六度戴战三度戴二种分戴要领.六度戴战三度戴与中央子午线存留如下闭系:366 N L =中; n L 33=中其中,N 、n 分别为6度戴战3度戴的戴号.其余,为了预防y 出现背号,确定y 值认为天加上500000m ;又为了辨别分歧投影戴,前里还要冠以戴号,如第20号六度戴中,y=-200.25m ,则成果表中写为y 假定=20499799.75m.x 值正在北半球总隐正值,便无需改变其瞅测值了.1、空间直角坐标系与空间天里坐标系间的变更图2-6表示了空间直角坐标系与空间天里坐标系之间的闭系.图2-6 天球空间直角坐标系与天里坐标系正在相共的基准下空间天里坐标系背空间直角坐标系的变更公式为:⎪⎭⎪⎬⎫+-=+=+=B H e N Z L B H N Y L B H N X sin ])1([sin cos )(cos cos )(2 (2-1)式中,W aN =,a 为椭球的少半轴,N 为椭球的卯酉圈直率半径 a =6378.137km2222a b a e -=,e 为椭球的第一偏偏心率,b 为椭球的短半轴 正在相共的基准下空间直角坐标系背空间天里坐标系的变更公式为⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫-Φ=⎪⎭⎫ ⎝⎛=⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+Φ=N B R H X Y arctg L W B Z ae tg arctg B cos cos sin 12(2-2) 式中2、空间坐标系与仄里直角坐标系间的变更空间坐标系与仄里直角坐标系间的变更采与的是投影变更的要领.正在我国普遍采与的是下斯投影.果为下斯投影战UTM 投影皆是横轴朱卡托的惯例,果此,下斯投影战UTM 投影皆不妨套用横轴朱卡托投影的投影公式.横轴朱卡托投影的投影的正反算公式可拜睹有闭资料,它们的辨别正在于轴子午线投影到仄里上后,其少度的系数,对付于下斯投影,系数为1,对付于UTM 投影,其系数为.3、变动下程归化里的做用用户正在修坐场合独力坐标系时,偶我变动下程归化里,那将爆收一个新椭球,那便必须估计新常数,新椭球常数按下列要领战步调举止:1) 新椭球是正在国家坐标系的参照椭球上夸大产死的,它的扁率应与国家坐标系参照椭球的扁率相等,即a a ='. 2) 估计该坐标系中央天区的新椭球仄衡直率半径战新椭球少半轴.新椭球仄衡直率半径为:m mm m m m H B e e a H W a W e a H MN H R R +--=+-=+=+=22232sin 11)1('(2.10) 式中m H ───该天区仄衡天里下;m B ───该天区的仄衡纬度.新椭球的少半轴按下式估计:2221sin 1''e B e R a m--=(2.11)将新的椭球参数代进,便不妨举止投影的正反估计了.二、坐标系统的变更要领分歧坐标系统的变更真量上是分歧基准间的变更,分歧基准间的变更要领有很多,其中最为时常使用的有布我沙模型,又称为七参数变更法.七参数变更法是:设二空间直角坐标系间有七个变更参数:3 个仄移参数()z y x ∆∆∆、3 个转动参数()z y x εεε战 1 个尺度参数k .比圆,由空间直角坐标系A 变更到空间直角坐标系B 可采与底下的公式:§2.3.4 GPS 丈量中时常使用的坐标系统一、天下天里坐标系WGS-84WGS-84 坐标系是暂时GPS 所采与的坐标系统,GPS 所颁布的星历参数战历书籍参数等皆是鉴于此坐标系统的.WGS-84 坐标系统的齐称是World Geodical System-84 (天下天里坐标系-84), 它是一个天心底固坐标系统.WGS-84 坐标系统由好国国防部造图局修坐,于1987 年与代了当时GPS 所采与的坐标系统WGS-72 坐标系统而成为当前GPS 所使用的坐标系统.WGS-84 坐标系的坐标本面位于天球的量心,Z 轴指背BIH1984.0 定义的协议天球极目标,X 轴指背BIH1984.0 的开初子午里战赤道的接面,Y 轴与X 轴战Z 轴形成左脚系.WGS-84 系所采与椭球参数为睹表2.1.二、1954 年北京坐标系1954 年北京坐标系是我国暂时广大采与的天里丈量坐标系.该坐标系源自于本苏联采与过的1942 年普我科妇坐标系.该坐标系采与的参照椭球是克推索妇斯基椭球.该椭球的参数睹表2.1.遗憾的是该椭球并已依据当时我国的天文瞅测资料举止沉新定位,而是由前苏联西伯利亚天区的一等锁经我国的东北天区传算过去的,该坐标系的下程非常十分是往日苏联1955 年天里程度里沉新仄好的截止为起算值,按我国天文程度门路推算出去的,而下程又是以1956 年青岛验潮站的黄海仄衡海火里为基准.由于当时条件的节造1954 年北京坐标系存留着很多缺面主要表示正在以下几个圆里:1. 克推索妇斯基椭球参数共新颖透彻的椭球参数的好别较大,而且没有包罗表示天球物理个性的参数,果而给表里战本量处事戴去了许多便当.2. 椭球定背没有格中透彻,椭球的短半轴既没有指背国际通用的CIO 极,也没有指背暂时我国使用的JYD极.参照椭球里与我国天里程度里呈西下东矮的系统性倾斜,东部下程非常十分达60余米,最大达67 米.3. 该坐标系统的天里面坐标是通过局部分区仄好得到的.果此世界的天文天里统造面本量上没有克没有及产死一个完齐,区与区之间有较大的隙距,如正在有的接合部中共一面正在分歧区的坐标值出进1-2 米,分歧分区的尺度好别也很大,而且坐标传播是从东北到西北战西北,后一区是往日一区的最强部动做坐标起算面,果而一等锁具备明隐的坐标聚集缺面.三、1980 年西安天里坐标系1978 年我国决断沉新对付世界天文天里网真止完齐仄好,而且修坐新的国家天里坐标系统.完齐仄好正在新天里坐标系统中举止,那个坐标系统便是1980 年西安天里坐标系统.1980 年西安天里坐标系统所采与的天球椭球参数的四个几许战物理参数采与了IAG 1975 年的推荐值,睹表2.1中的西安80.椭球的短轴仄止于天球的自转轴(由天球量心指背1968.0 JYD 天极本面目标),起初子午里仄止于格林僧治仄衡天文子午里,椭球里共似天里程度里正在我国境内切合最佳,下程系统以1956 年黄海仄衡海火里为下程起算基准.四、几种时常使用的坐标系统的几许战物理参数下表列出了几种时常使用的坐标系统的几许战物理参数,用户需要时不妨查阅:表 2.1 GPS 丈量中时常使用的坐标系统的几许战物理参数§2.4 GPS下程系统正在丈量中时常使用的下程系统有天里下系统、正下系统战仄常下系统.§2.4.1 天里下系统天里下系统是以参照椭球里为基准里的下程系统,某面的天里下是该面到通过该面的参照椭球的法线与参照椭球里的接面间的距离.天里下也称为椭球下.天里下普遍用标记H 表示.天里下是一个杂几许量,没有具备物理意思,共一个面正在分歧的基准下具备分歧的天里下.常常,GPS接支机单面定位得到的下程为WGS-84下的天里下.§2.4.2 正下系统正下系统是以天里程度里为基准里的下程系统,某面的正下是该面到通过该面的铅垂线与天里程度里的接面之间的距离.正下用标记 H g 表示.§2.4.3 仄常下仄常下系统是以似天里程度里为基准的下程系统,某面的仄常下是该面到通过该面的铅垂线与似天里程度里的接面之间的距离,仄常下用 H γ 表示.§2.4.4下程系统之间的变更闭系天里程度里到参照椭球里的距离称为天里程度里好同,记为 h g ,天里下与正下之间的闭系不妨表示为:正 下:g g h H H -=似天里程度里到参照椭球里的距离,称为下程非常十分,记为ζ.天里下与仄常下之间的闭系不妨表示为:仄常下:ζγ-=H H下程之间的相互闭系不妨用下图2-7去表示:图2-7 下程系统间的相互闭系。
直角坐标系坐标转换公式解析直角坐标系(也称笛卡尔坐标系)是一种二维坐标系统,由两条相互垂直的轴组成,通常水平轴称为x轴,垂直轴称为y轴。
在这种坐标系中,每个点的位置由两个坐标值(x,y)表示,x值表示点相对于原点在x轴方向上的距离,y值表示点相对于原点在y轴方向上的距离。
1.极坐标转直角坐标:在极坐标系中,一个点的位置由极径r和极角θ表示。
极径r表示点相对于极点的距离,极角θ表示点与极正方向的夹角。
对于特定的点(r,θ),我们可以使用以下公式将其转换为直角坐标系中的坐标(x,y):x = r * cos(θ)y = r * sin(θ)其中cos(θ)表示θ的余弦值,sin(θ)表示θ的正弦值。
这两个公式描述了点在直角坐标系中的位置。
2.直角坐标转极坐标:对于给定的点(x,y),我们可以使用以下公式将其转换为极坐标系中的坐标(r,θ):r = sqrt(x^2 + y^2)θ = atan2(y, x)其中sqrt(x^2 + y^2)表示点到原点的距离,atan2(y, x)表示点与正 x 轴的夹角。
这两个公式描述了点在极坐标系中的位置。
需要注意的是,当进行坐标转换时,需要考虑坐标系的正负方向以及特殊角度的处理,如负角度和超过360度的角度。
此外,将极坐标系的点转换为直角坐标系时,有可能存在多个直角坐标系的点对应于同一个极坐标系的点,这是由于一个角度对应于一条射线,而不是一个具体的点。
直角坐标系坐标转换公式在数学、物理学、工程学等领域有着广泛的应用。
它们可以用于描述点的位置、计算两点间的距离和角度,以及进行图形的变换和旋转等操作。
了解和理解这些公式可以帮助我们更好地理解和应用直角坐标系。
直角坐标与极坐标的互化公式推导过程直角坐标系和极坐标系是两种常见的表示平面上点位置的坐标系。
在实际应用中,有时需要将一个点的坐标从直角坐标系转换为极坐标系,或者反过来。
为了实现坐标系的互化,我们需要推导出直角坐标与极坐标之间的互化公式。
下面,我们将详细介绍直角坐标与极坐标的互化公式推导过程。
1. 直角坐标系介绍直角坐标系是最常见的坐标系之一,通过在平面上引入两条相互垂直的坐标轴,通常表示为x轴和y轴,来确定一个点的位置。
在直角坐标系中,每个点的位置可以用一个有序的数对(x, y) 表示,其中 x 是该点在 x 轴上的位置, y 是该点在 y轴上的位置。
2. 极坐标系介绍相比直角坐标系,极坐标系使用极径和极角来表示平面上的点。
极径指的是点到原点的距离,极角指的是从极径到正半轴的逆时针旋转角度。
在极坐标系中,每个点的位置可以用一个有序的数对(r, θ) 表示,其中 r 是该点到原点的距离,θ 是该点对应的极角。
3. 直角坐标到极坐标的转换设一个点在直角坐标系中的坐标为 (x, y) ,我们需要将其转换到极坐标系中的坐标(r, θ)。
根据直角三角形的性质,我们可以得到以下关系:r = √(x^2 + y^2) (1)tan(θ) = y / x (2)其中,关系式(1) 表示点到原点的距离,是直角边 x 和 y 的平方和的平方根;关系式(2) 表示点对应的极角,是 y 坐标与 x 坐标的比值的反正切值。
4. 极坐标到直角坐标的转换现在假设一个点在极坐标系中的坐标为(r, θ),我们需要将其转换到直角坐标系中的坐标 (x, y)。
根据正弦和余弦的定义,我们可以得到以下关系:x = r * cos(θ) (3)y = r * sin(θ) (4)关系式(3) 表示点在 x 轴上的位置,是 r 乘以极角对应的余弦值;关系式(4) 表示点在 y 轴上的位置,是 r 乘以极角对应的正弦值。
通过关系式(3) 和 (4),我们可以将极坐标系中的点转换为直角坐标系中的点。
大地坐标系与空间直角坐标系的相互转换公式概述大地坐标系和空间直角坐标系是地理信息系统中两种常用的坐标系。
大地坐标系主要用于描述地球上点的位置,而空间直角坐标系则是使用笛卡尔坐标系的三维空间中的坐标来表示点的位置。
在地理信息系统中,需要经常进行大地坐标系和空间直角坐标系之间的转换,以便在不同的坐标系统之间进行数据交互和分析。
大地坐标系大地坐标系是一种基于地球椭球体的坐标系统,常用来描述地球上点的位置。
一般采用经度(longitude)、纬度(latitude)和高程(elevation)来表示点在地球表面的位置。
经度表示点在东经或西经的位置,纬度表示点在北纬或南纬的位置,高程表示点相对于海平面的高度。
大地坐标系中经度的表示方式有多种,常见的有度分秒制和十进制制。
而纬度则一般用度制表示。
对于高程的表示方式,通常使用米作为单位。
空间直角坐标系空间直角坐标系是使用笛卡尔坐标系的三维空间中的坐标来表示点的位置。
在空间直角坐标系中,每个点的位置由三个数值组成,分别表示点在X轴、Y轴和Z轴方向上的位置。
这三个数值通常以米为单位。
空间直角坐标系中的原点可以选择任意位置,常见的有地心、地心地固、地心地独立三种坐标系。
地心坐标系以地球质心为原点,地心地固坐标系以地球上某一固定点为原点,地心地独立坐标系则是相对于地轴的一个旋转坐标系。
大地坐标系到空间直角坐标系的转换将大地坐标系中的点转换为空间直角坐标系中的点需要使用转换公式。
常用的转换方法有大地测量学和地心测量学两种。
### 大地测量学方法大地测量学方法中,将地球近似为椭球体,利用椭球体的形状参数和点的大地坐标来进行转换。
该方法的核心思想是通过计算点在曲线面上的法线方向,将大地坐标系的点转换为空间直角坐标系的点。
### 地心测量学方法地心测量学方法中,将地球近似为球体,并以地球质心或地球上某一固定点为原点。
该方法利用球面三角学的原理,根据点的经纬度和高程来进行转换。
直角坐标方程与极坐标方程互化公式推导在平面几何中,直角坐标系和极坐标系是常见的坐标系。
直角坐标系由x轴和y轴组成,通过点的水平和垂直距离来确定点的位置。
而极坐标系则根据点与原点的距离和点与x轴的夹角来确定点的位置。
在某些情况下,我们需要将直角坐标方程转换为极坐标方程,或者将极坐标方程转换为直角坐标方程。
本文将推导直角坐标方程与极坐标方程的互化公式。
一、直角坐标方程转换为极坐标方程假设点P在直角坐标系中的坐标为(x, y),点P在极坐标系中的极径为r,极角为θ。
我们需要推导关于x和y的方程,以及关于r和θ的方程。
首先,由勾股定理可知:r2=x2+y2其次,我们需要根据P点在直角坐标系中的坐标来确定θ的取值。
根据直角三角形的性质,可以得到:$\\sin \\theta = \\frac{y}{r}$$\\cos \\theta = \\frac{x}{r}$最后,我们将以上的方程合并,得到直角坐标方程转换为极坐标方程的公式:r2=x2+y2$\\theta = \\arctan \\left( \\frac{y}{x} \\right)$二、极坐标方程转换为直角坐标方程假设点P在极坐标系中的坐标为(r, θ),点P在直角坐标系中的x坐标为x,y 坐标为y。
我们需要推导关于r和θ的方程,以及关于x和y的方程。
首先,由勾股定理可知:r2=x2+y2其次,我们需要根据P点在极坐标系中的坐标来确定x和y的取值。
根据直角三角形的性质,可以得到:$x = r \\cdot \\cos \\theta$$y = r \\cdot \\sin \\theta$最后,我们将以上的方程合并,得到极坐标方程转换为直角坐标方程的公式:r2=x2+y2$x = r \\cdot \\cos \\theta$$y = r \\cdot \\sin \\theta$三、实例分析下面通过一个实例来说明如何使用上述互化公式进行坐标转换。