PROE运动仿真分析基础教程
- 格式:doc
- 大小:588.50 KB
- 文档页数:18

PROE运动仿真分析PROE(Pro/ENGINEER)是由美国Parametric TechnologyCorporation(PTC)公司所开发的一套3D CAD软件系统。
它是一款功能强大的工程设计与制造软件,广泛应用于机械工程、汽车工程等领域。
在PROE中进行运动仿真分析可以帮助工程师们更好地了解和优化他们的设计方案。
运动仿真分析是一种通过模拟机械系统在给定条件下的运动来评估其性能和运行情况的方法。
通过对设备或产品的运动进行分析与仿真,可以预测其运动特性、动力学行为和相应的应力应变等情况。
这对于设计师来说非常重要,因为它可以在实际制造之前发现问题并进行相应的调整,从而节省时间和成本。
在PROE中进行运动仿真分析有几个基本步骤。
首先,我们需要创建一个装配模型,也就是包含了所有相关零部件的模型。
然后,我们需要为每个零件定义其运动关系和约束条件。
这些条件可以是固定的,也可以是变化的。
接下来,我们需要选择适当的运动学分析工具,例如正向动力学和逆向动力学。
运动学分析允许我们确定系统的运动规律和轨迹。
最后,我们需要对系统的受力和应力进行分析,以确定零件的强度和稳定性。
PROE中的运动仿真分析可以帮助工程师在设计过程中解决各种问题。
以下是一些典型的应用案例:1.碰撞检测:PROE可以模拟装配过程中各个零部件之间的碰撞情况。
这可以帮助设计师排除可能导致装配错误或故障的问题。
2.动力学分析:通过对装配模型进行运动仿真分析,可以确定各个零部件的运动规律和速度变化。
这对于设计运动机构和机械设备非常重要。
3.振动分析:PROE可以帮助评估系统的振动特性,包括自由振动频率和振幅。
这对于减少振动和噪音问题非常有用。
4.受力和应力分析:工程师可以使用PROE进行受力和应力分析,以确定系统中可能存在的弱点和潜在的破坏部位。
这对于优化设计方案和提高产品强度至关重要。
5.运动优化:PROE可以帮助工程师优化机械系统的运动性能,例如减少摩擦、优化速度和精度等。

PROE机构仿真之运动分析关键词:PROE 仿真运动分析重复组件分析连接回放运动包络轨迹曲线术语创建机构前,应熟悉下列术语在PROE中的定义:主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。
连接(Connections) - 定义并约束相对运动的主体之间的关系。
自由度(Degrees of Freedom) - 允许的机械系统运动。
连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。
拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。
动态(Dynamics) - 研究机构在受力后的运动。
执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。
齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。
基础(Ground) - 不移动的主体。
其它主体相对于基础运动。
接头(Joints) - 特定的连接类型(例如销钉接头、滑块接头和球接头)。
运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。
环连接(Loop Connection) - 添加到运动环中的最后一个连接。
运动(Motion) - 主体受电动机或负荷作用时的移动方式。
放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。
回放(Playback) - 记录并重放分析运行的结果。
伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。
可在接头或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。
LCS - 与主体相关的局部坐标系。
LCS 是与主体中定义的第一个零件相关的缺省坐标系。
UCS - 用户坐标系。
WCS - 全局坐标系。
组件的全局坐标系,它包括用于组件及该组件内所有主体的全局坐标系。
运动分析的定义在满足伺服电动机轮廓和接头连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。

PROE机构仿真之活动剖析症结词:PROE 仿真活动剖析反复组件剖析衔接回放活动包络轨迹曲线术语创建机构前,应熟习下列术语在PROE中的界说:主体 (Body) 一个元件或彼此无相对活动的一组元件,主体内DOF=0.衔接 (Connections) 界说并束缚相对活动的主体之间的关系.自由度 (Degrees of Freedom) 许可的机械体系活动.衔接的感化是束缚主体之间的相对活动,削减体系可能的总自由度.拖动 (Dragging) 在屏幕上用鼠标拾取并移念头构.动态 (Dynamics) 研讨机构在受力后的活动.履行电念头 (Force Motor) 感化于扭转轴或平移轴上(引起活动)的力.齿轮副衔接 (Gear Pair Connection) 运用到两衔接轴的速度束缚.基本 (Ground) 不移动的主体.其它主体相对于基本活动.接头 (Joints) 特定的衔接类型(例如销钉接头.滑块接头和球接头).活动 (Kinematics) 研讨机构的活动,而不斟酌移念头构所需的力.环衔接 (Loop Connection) 添加到活动环中的最后一个衔接.活动 (Motion) 主体受电念头或负荷感化时的移动方法.放置束缚 (Placement Constraint) 组件中放置元件并限制该元件在组件中活动的图元.回放 (Playback) 记载着重放剖析运行的成果.伺服电念头 (Servo Motor) 界说一个主体相对于另一个主体活动的方法.可在接头或几何图元上放置电念头,并可指定主体间的地位.速度或加快度活动.LCS 与主体相干的局部坐标系.LCS 是与主体中界说的第一个零件相干的缺省坐标系.UCS 用户坐标系.WCS 全局坐标系.组件的全局坐标系,它包含用于组件及该组件内所有主体的全局坐标系.活动剖析的界说在知足伺服电念头轮廓和接头衔接.凸轮从念头构.槽从念头构或齿轮副衔接的请求的情形下,模仿机构的活动.活动剖析不斟酌受力,它模仿除质量和力之外的活动的所有方面.是以,活动剖析不克不及运用履行电念头,也不必为机构指定质量属性.活动剖析疏忽模子中的所有动态图元,如弹簧.阻尼器.重力.力/力矩以及履行电念头等,所有动态图元都不影响活动剖析成果.假如伺服电念头具有不持续轮廓,在运交活动剖析前软件会测验测验使其轮廓持续,假如不克不及使其轮廓持续,则此伺服电机将不克不及用于剖析.运用活动剖析可获得以下信息:几何图元和衔接的地位.速度以及加快度元件间的干预机构活动的轨迹曲线作为 Pro/ENGINEER 零件捕获机构活动的活动包络反复组件剖析WF2.0以前版本里的“活动剖析”,在WF2.0里被称为“反复组件剖析”.它与活动剖析相似,所有实用于活动剖析的请求及设定,都可用于反复组件剖析,所有不适于活动剖析的身分,也都不实用于反复组件剖析.反复组件剖析的输出成果比活动剖析少,不克不及剖析速度.加快度,不克不及做机构的活动包络.运用反复组件剖析可获得以下信息:几何图元和衔接的地位元件间的干预机构活动的轨迹曲线活动剖析工作流程创建模子:界说主体,生成衔接,界说衔接轴设置,生成特别衔接检讨模子:拖动组件,磨练所界说的衔接是否能产生预期的活动参加活动剖析图元:设定伺服电机预备剖析:界说初始地位及其快照,创建测量剖析模子:界说活动剖析,运行成果获得:成果回放,干预检讨,检讨测量成果,创建轨迹曲线,创建活动包络装入元件时的两种方法:接头衔接与束缚衔接向组件中增长元件时,会弹出“元件放置”窗口,此窗口有三个页面:“放置”.“移动”.“衔接”.传统的装配元件办法是在“放置”页面给元件参加各类固定束缚,将元件的自由度削减到0,因元件的地位被完全固定,如许装配的元件不克不及用于活动剖析(基体除外).另一种装配元件的办法是在“衔接”页面给元件参加各类组合束缚,如“销钉”.“圆柱”.“刚体”.“球”.“6DOF”等等,运用这些组合束缚装配的元件,因自由度没有完全清除(刚体.焊接.通例除外),元件可以自由移动或扭转,如许装配的元件可用于活动剖析.传统装配法可称为“束缚衔接”,后一种装配法可称为“接头衔接”.束缚衔接与接头衔接的雷同点:都运用PROE的束缚来放置元件,组件与子组件的关系雷同.束缚衔接与接头衔接的不合点:束缚衔接运用一个或多个单束缚来完全清除元件的自由度,接头衔接运用一个或多个组合束缚来束缚元件的地位.束缚衔接装配的目标是清除所有自由度,元件被完全定位,接头衔接装配的目标是获得特定的活动,元件平日还具有一个或多个自由度.“元件放置”窗口:(yd1)接头衔接的类型接头衔接所用的束缚都是能实现特定活动(含固定)的组合束缚,包含:销钉.圆柱.滑动杆.轴承.平面.球.6DOF.通例.刚性.焊接,共10种.销钉:由一个轴对齐束缚和一个与轴垂直的平移束缚构成.元件可以绕轴扭转,具有1个扭转自由度,总自由度为1.轴对齐束缚可选择直边或轴线或圆柱面,可反向;平移束缚可所以两个点对齐,也可所以两个平面的对齐/配对,平面临齐/配对时,可以设置偏移量.圆柱:由一个轴对齐束缚构成.比销钉束缚少了一个平移束缚,是以元件可绕轴扭转同时可沿轴向平移,具有1个扭转自由度和1个平移自由度,总自由度为2.轴对齐束缚可选择直边或轴线或圆柱面,可反向.滑动杆:即滑块,由一个轴对齐束缚和一个扭转束缚(现实上就是一个与轴平行的平移束缚)构成.元件可滑轴平移,具有1个平移自由度,总自由度为1.轴对齐束缚可选择直边或轴线或圆柱面,可反向.扭转束缚选择两个平面,偏移量依据元件所处地位主动盘算,可反向.轴承:由一个点对齐束缚构成.它与机械上的“轴承”不合,它是元件(或组件)上的一个点对齐到组件(或元件)上的一条直边或轴线上,是以元件可沿轴线平移并随意率性偏向扭转,具有1个平移自由度和3个扭转自由度,总自由度为4.平面:由一个平面束缚构成,也就是肯定了元件上某平面与组件上某平面之间的距离(或重合).元件可绕垂直于平面的轴扭转并在平行于平面的两个偏向上平移,具有1个扭转自由度和2个平移自由度,总自由度为3.可指定偏移量,可反向.球:由一个点对齐束缚构成.元件上的一个点对齐到组件上的一个点,比轴承衔接小了一个平移自由度,可以绕着对齐点随意率性扭转,具有3个入扭转自由度,总自由度为3.6DOF:即6自由度,也就是对元件不作任何束缚,仅用一个元件坐标系和一个组件坐标系重合来使元件与组件产生联系关系.元件可随意率性扭转和平移,具有3个扭转自由度和3个平移自由度,总自由度为6.刚性:运用一个或多个根本束缚,将元件与组件衔接到一路.衔接后,元件与组件成为一个主体,互相之间不再有自由度,假如刚性衔接没有将自由度完全清除,则元件将在当前地位被“粘”在组件上.假如将一个子组件与组件用刚性衔接,子组件内各零件也将一路被“粘”住,其原有自由度不起感化.总自由度为0.焊接:两个坐标系对齐,元件自由度被完全清除.衔接后,元件与组件成为一个主体,互相之间不再有自由度.假如将一个子组件与组件用焊接衔接,子组件内各零件将参照组件坐标系发按其原有自由度的感化.总自由度为0.接头衔接类型:(yd2)接头衔接束缚:通例通例:也就是自界说组合束缚,可依据须要指定一个或多个根本束缚来形成一个新的组合束缚,其自由度的若干因所用的根本束缚种类及数目不合而不合.可用的根本束缚有:匹配.对齐.拔出.坐标系.线上点.曲面上的点.曲面上的边,共7种.在界说的时刻,可依据须要选择一种,也可先不拔取类型,直接拔取要运用的对象,此时在类型那边开端显示为“主动”,然后依据所选择的对象体系主动肯定一个适合的根本束缚类型.通例—匹配/对齐:对齐).单一的“匹配/对齐”构成的自界说组合束缚转换为束缚衔接后,变成只有一个“匹配/对齐”束缚的不完全束缚,再转换为接头束缚后变成“平面”衔接.这两个束缚用来肯定两个平面的相对地位,可设定偏距值,也可反向.界说完后,在不修正对象的情形下可更改类型(匹配通例—拔出:拔取对象为两个柱面.单一的“拔出”构成的自界说组合束缚转换为束缚衔接后,变成只有一个“拔出”束缚的不完全束缚,再转换为接头束缚后变成“圆柱”衔接.通例—坐标系:拔取对象为两个坐标系,与6DOF的坐标系束缚不合,此坐标系将元件完全定位,清除了所有自由度.单一的“坐标系”构成的自界说组合束缚转换为束缚衔接后,变成只有一个“坐标系”束缚的完全束缚,再转换为接头束缚后变成“焊接”衔接.通例—线上点:拔取对象为一个点和一条直线或轴线.与“轴承”等效.单一的“线上点”构成的自界说组合束缚转换为束缚衔接后,变成只有一个“线上点”束缚的不完全束缚,再转换为接头束缚后变成“轴承”衔接.通例—曲面上的点:拔取对象为一个平面和一个点.单一的“曲面上的点”构成的自界说组合束缚转换为束缚衔接后,变成只有一个“曲面上的点”束缚的不完全束缚,再转换为接头束缚后仍为单一的“曲面上的点”构成的自界说组合束缚.通例—曲面上的边:拔取对象为一个平面/柱面和一条直边.单一的“曲面上的点”构成的自界说组合束缚不克不及转换为束缚衔接.自由度与冗余束缚自由度(DOF)是描写或肯定一个体系(主体)的活动或状况(如地位)所必须的自力参变量(或坐标数).一个不受任何束缚的自由主体,在空间活动时,具有6个自力活动参数(自由度),即沿XYZ三个轴的自力移动和绕XYZ三个轴的自力迁移转变,在平面活动时,则只具有3个自力活动参数(自由度),即沿XYZ三个轴的自力移动.主体受到束缚后,某些自力活动参数不再消失,相对应的,这些自由度也就被清除.当6个自由度都被清除后,主体就被完全定位并且不成能再产生任何活动.如运用销钉衔接后,主体沿XYZ三个轴的平移活动被限制,这三个平移自由度被清除,主体只能绕指定轴(如X轴)扭转,不克不及绕另两个轴(YZ轴)扭转,绕这两个轴扭转的自由度被清除,成果只留下一个扭转自由度.冗余束缚指过多的束缚.在空间里,要完全束缚住一个主体,须要将三个自力移动和三个自力迁移转变分离束缚住,假如把一个主体的这六个自由度都束缚住了,再另加一个束缚去限制它沿X轴的平移,这个束缚就是冗余束缚.合理的冗余束缚可用来分摊主体各部分受到的力,使主体受力平均或削减磨擦.抵偿误差,延长装备运用寿命.冗余束缚对主体的力状况产生影响,对主体的对活动没有影响.因活动剖析只剖析主体的活动状况,不剖析主体的力状况,在活动剖析时,可不斟酌冗余束缚的感化,而在涉及力状况的剖析里,必须要恰当的处理好冗余束缚,以得到精确的剖析成果.体系在每次运行剖析时,都邑对自由度进行盘算.并可创建一个测量来盘算机构有若干自由度.若干冗余.PROE的帮忙里有一个门搭钮的例子来讲冗余与自由度的盘算,但其剖析实丰有欠妥善,列位想精确盘算模子的自由度的话,请找机构设计方面的书来细心研讨一番.这也不是几句话能解释确的,我这里只提一下就是了,不再详.束缚转换接头衔接与束缚衔接可互相转换.在“元件放置”窗口的“放置”页面和“衔接”页面里,在束缚列表下方,都有一个“束缚转换”按钮.运用此按钮可在任何时刻依据须要将接头衔接转换为束缚衔接,或将束缚衔接转换为接头衔接.在转换时,体系依据现有束缚及其对象的性质主动拔取最相配的新类型.如对体系主动拔取的成果不知足,可再进行编辑.转换的规矩,可参考PROE的自带帮忙.不过,没有很好的空间想像力和耐性的兄弟就不必看了.须要记住的一个:曲线上的点.曲面上的点.相切束缚,在转换时是不会转换成通例衔接的.下图显示“束缚转换”和“反向”按钮:(yd3)基本与重界说主体基本是在活动剖析中被设定为不介入活动的主体.创建新组件时,装配(或创建)的第一个元件主动成为基本.元件运用束缚衔接(“元件放置”窗口中“放置”页面)与基本产生关系,则此元件也成为基本的一部分.假如机构不克不及以预期的方法移动,或者因两个零件在统一主体中而不克不及创建衔接,就可以运用“重界说主体”来确认主体之间的束缚关系及删除某些束缚.进入“机构”模块后,“编辑”—>“重界说主体”进入主体重界说窗口,选定一个主体,将在窗口里显示这个主体所受到的束缚(仅束缚衔接及“刚体”接头所用的束缚).可以选定一个束缚,将其删除.假如删除所有束缚,元件将被封装.“重界说主体”窗口:(yd4)特别衔接:凸轮衔接凸轮衔接,就是用凸轮的轮廓去掌握从动件的活动纪律.PROE里的凸轮衔接,运用的是平面凸轮.但为了形象,创建凸轮后,都邑让凸轮显示出必定的厚度(深度).凸轮衔接只须要指定两个主体上的各一个(或一组)曲面或曲线就可以了.界说窗口里的“凸轮1”“凸轮2”分离是两个主体中任何一个,并不是从动件就是“凸轮2”.假如选择曲面,可将“主动拔取”复选框勾上,如许,体系将主动把与所选曲面的邻接曲面选中,假如不必“主动拔取”,须要选多个相邻面时要按住Ctrl.假如选择曲线/边,“主动拔取”是无效的.假如所选边是直边或基准曲线,则还要指定工作平面(即所界说的二维平面凸轮在哪一个平面上).凸轮一般是从动件沿凸轮件的概况活动,在PROE里界说凸轮时,还要肯定活动的现实接触面.拔取了曲面或曲线后,将会出线一个箭头,这个箭头指导出所选曲面或曲线的法向,箭头指向哪侧,也就是活动时接触点将在哪侧.假如体系指导出的偏向与想界说的偏向不合,可反向.关于“启用升离”,打开这个选项,凸轮运转时,从动件可分开主动件,不运用此选项时,从动件始终与主动件接触.启用升离后才干界说“恢复系数”,即“启用升离”复选框下方的谁人“e”.因为是二维凸轮,只要肯定了凸轮轮廓和工作平面,这个凸轮的外形与地位也就算界说完全了.为了形象,体系会给这个二维凸轮显示出一个厚度(即深度).平日我们可不必去修正它,运用“主动”就可以了.也可自已界说这个显示深度,但对剖析成果没有影响.须要留意:A.所选曲面只能是单向曲折曲面(如拉伸曲面),不克不及是多向曲折曲面(如扭转出来的鼓形曲面).B.所选曲面或曲线中,可以有平面和直边,但应防止在两个主体上同时消失.C.体系不会主动处理曲面(曲线)中的尖角/拐点/不持续,假如消失如许的问题,应在界说凸轮前恰当处理.凸轮可界说“升离”.“恢复系数”与“磨擦”.凸轮界说窗口:(yd5)特别衔接:齿轮衔接齿轮衔接用来掌握两个扭转轴之间的速度关系.在PROE中齿轮衔接分为尺度齿轮和齿轮齿条两种类型.尺度齿轮需界说两个齿轮,齿轮齿条需界说一个小齿轮和一个齿条.一个齿轮(或齿条)由两个主体和这两个主体之间的一个扭转轴构成.是以,在界说齿轮前,需先界说含有扭转轴的接头衔接(如销钉).界说齿轮时,只需选定由接头衔接界说出来的与齿轮本体相干的谁人扭转轴即可,体系主动将产生这根轴的两个主体设定为“齿轮”(或“小齿轮”.“齿条”)和“托架”,“托架”一般就是用来装配齿轮的主体,它一般是静止的,假如体系选反了,可用“反向”按钮将齿轮与托架主体交流.“齿轮2”或“齿条”所用轴的扭转偏向是可以变动的,点界说窗口里“齿轮2”轴右侧的反向按钮就可以,点中后画面会消失一个很粗的箭头指导此轴扭转的正向.速比界说:在“齿轮副界说”窗口的“齿轮1”.“齿轮2”.“小齿轮”页面里,都有一个输入节圆直径的地方,可以在界说齿轮时将齿轮的现实节圆直径输入到这里.在“属性”页面里,“齿轮比”(“齿条比”)有两种选择,一是“节圆直径”,一是“用户界说的”.选择“节圆直径”时,D1.D2由体系主动依据前两个页面里的数值盘算出来,不成修正.选择“用户界说的”时,D1.D2须要输入,此情形下,齿轮速度比由此处输入的D1.D2肯定,前两个页面里输入的节圆直径不起感化.速度比为节圆直径比的倒数,即:齿轮1速度/齿轮2速度=齿轮2节圆直径/齿轮1节圆直径=D2/D1.齿条比为齿轮转一周时齿条平移的距离,齿条比选择“节圆直径”时,其数值由体系依据小齿轮的节圆数值盘算出来,不成修正,选择“用户界说的”时,其数值须要输入,此情形下,小齿轮界说页面里输入的节圆直径不起感化.图标地位:界说齿轮后,每一个齿轮都有一个图标,以显示这里界说了一个齿轮,一条虚线把两个图标的中间连起来.默认情形下,齿轮图标在所选衔接轴的零点,图标地位也可自界说,点选一个点,图标将平移到谁人点地点平面上.图标的地位只是一视觉后果,不会对剖析产生影响.要留意的事项:A.PROE里的齿轮衔接,只须要指定一个扭转轴和节圆参数就可以了.是以,齿轮的具体外形可以不必做出来,即使是两个圆柱,也可以在它们之间界说一个齿轮衔接.B.两个齿轮应运用公共的托架主体,假如没有公共的托架主体,剖析时体系将创建一个不成见的内部主体作为公共托架主体,此主体的质量等于最小主体质量的千分之一.并且在运行与力相干的剖析(动态.力均衡.静态)时,会提醒指出没有公共托架主体.齿轮界说窗口:(yd6)特别衔接:槽衔接槽衔接是两个主体之间的一个点曲线衔接.从动件上的一个点,始终在主动件上主体之间是否干预,点和曲线甚至可所以零件实体以外的基准点和基准曲线,当然也可以在实体内部.曲线可所以任何一组相邻曲线(即请求相连,不必相切),可所以基准曲线,也可所以实体/曲面的边,可所以凋谢的,也可所以关闭的.点可所以任何一个基准点或极点,但只能是零件中的,组件中的点不克不及用于槽衔接.活动时,从动件上的点始终在主动件上的指定曲线上,假如曲线是一条(组)凋谢曲线,则此曲线(曲线组)的首末两个端点为槽的默认端点,假如是一条(组)关闭曲线,则默认无故点.假如愿望活动区间不是在整条曲线(曲线组)上,而只是在个中的一段上,则须要自界说槽的端点.对于凋谢曲线(曲线组),只要指定新的端点就可以了,对于关闭曲线,指定两个新端点后,体系主动拔取被两头点朋分出的两段曲线中的一段为运行区间,假如不是所须要的,点“反向”拔取另一段.界说槽端点可拔取基准点.极点.曲线/边/曲面,假如选的曲直线/边/曲面,则槽端点为槽曲线与所选曲线/边/曲面的交点.槽衔接可界说“恢复系数”与“磨擦”.槽衔接界说窗口:(yd7)拖动与快照拖动,是在许可的规模内移念头械.快照,对机械的某一特别状况的记载.可以运用拖动调剂机构中各零件的具体地位,初步检讨机构的装配与活动情形,并可将其保管为快照,快照可用于后续的剖析界说中,也可用于绘制工程图.“机构”“拖动”,进入“拖动”窗口,此窗口具有一个对象栏,对象栏左第一个按钮为“保管快照”,即将当前屏幕上的状况保管为一个快照,左第二个按钮为“点拖动”,即点取机构上的一个点,移动鼠标以转变元件的地位,左第三个按钮“裁撤”和“恢复”,每一次拖动,体系都邑记载入内存,运用此两按钮,可检讨已做的各次拖动的成果.“快照”页和“束缚”页,分离有一个列表,显示当前已经界说的快照和为当前拖动界说的暂时束缚.快照列表左侧有一列对象按钮,第一个为显示当前快照,即将屏幕显示刷新为选定快照的内容;第二个为从其它快照中把某些元件的地位提取入选定快照;第三个为刷新选定快照,即将选定快照的内容更新为屏幕上的状况;第四个为画图可用,使选定快照可被当做分化状况运用,从而在画图中运用,这是一个开关型按钮,当快照可用于画图时,列表中的快照名前会有一个图标;第五个是删除选定快照.束缚列表显示已为当前拖动所界说的暂时束缚,这些暂时束缚只用于当前拖动操纵,以进一步限制拖动时各主体之间的相对活动.“高等拖动选项”供给了一组对象,用于精确限制拖动时被拖动点或主体的活动.拖动窗口:(yd8)恢复系数与磨擦即碰撞系数,其物理界说为两物体碰撞后的相对速度(V2V1)与碰撞前的相对速度(V10V20)的比值,即e=(V2V1)/(V10V20),它的值介于0到1之间.典范的恢复系数可从工程书本或现实经验中得到.恢复系数取决于材料属性.主体几何故及碰撞速度等身分.在机构中运用恢复系数,是在刚体盘算中模仿非刚性属性的一种办法.完全弹性碰撞的恢复系数为 1.完全非弹性碰撞的恢复系数为 0.橡皮球的恢复系数相对较高.而湿土壤块的恢复系数值异常接近0.摩擦阻碍凸轮或槽的活动.摩擦系数取决于接触材料的类型以及实验前提.可在物理或工程书本中查找各类典范的摩擦系数表.须要分离指定静磨擦系数和动磨擦系数,且静磨擦系数应大于动磨擦系数.要在力均衡剖析中盘算凸轮滑动测量,必须指定凸轮衔接的磨擦系数.衔接轴设置“机构”—“衔接轴设置”,可为由接头衔接(如销钉)产生的衔接轴界说一些具体的属性,包含:衔接轴的地位,衔接轴的零参照,衔接轴的再生地位(用于反复组件剖析),衔接轴的活动限制.恢复系数及磨擦.进入此窗口后,需先拔取一衔接轴,然后再对此轴进行各类设置.“衔接轴地位”,这里显示的是衔接轴的两个零参照间的地位或距离,未转变时,显示的是当前屏幕上这个地位时的值.假如本身输入一个数值并回车(对于扭转轴,此数值为180到180,如超出此规模或超出“属性”里设置的限制规模,体系将主动转换成可接收的规模内的值),屏幕上的组件也将暂时转变地位以反应当前修正,假如按了“生成零点”,则将当前地位设定为衔接轴零点,其它测量都从此零点地位开端.点了“生成零点”后,“指定参照”将无效.假如选了“指定参照”,则“生成零点”无效.“指定参照”可为衔接轴的两个主体分离选定零地位的几何参照.拔取“再生值”,可让组件在非衔接轴零点地位再生,这个用于反复组件剖析中.“启用限制”,设置接头活动时的最大最小活动规模及恢复系数.对于扭转轴,“最小”值为180到180之间且小于最大值,“最大”值为180到180之间且大于最小值.恢复系数用来模仿当衔接轴活动到限制地位时的冲击力.“启用磨擦”,设置接头的两个主体之间互相活动的阻力.需指定静磨擦系数和动磨擦系数,对于扭转轴,还应指定一个大于零的接触半径值,它用于界说磨擦扭矩感化于衔接轴上的半径.静磨擦系数应大于动磨擦系数.在任何衔接轴上,都不克不及创建多个衔接轴零点.不克不及为球接头界说衔接轴设置.别的,不克不及编辑属于多扭转 DOF 接头(如 6DOF 或某个一般衔接)的扭转衔接轴的衔接轴设置.。

PROE机构仿真之运动分析关键词:PROE 仿真运动分析重复组件分析连接回放运动包络轨迹曲线术语创建机构前,应熟悉下列术语在PROE中的定义:主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。
连接(Connections) - 定义并约束相对运动的主体之间的关系。
自由度(Degrees of Freedom) - 允许的机械系统运动。
连接的作用就是约束主体之间的相对运动,减少系统可能的总自由度。
拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。
动态(Dynamics) - 研究机构在受力后的运动。
执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。
齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。
基础(Ground) - 不移动的主体。
其它主体相对于基础运动。
接头(Joints) - 特定的连接类型(例如销钉接头、滑块接头与球接头)。
运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。
环连接(Loop Connection) - 添加到运动环中的最后一个连接。
运动(Motion) - 主体受电动机或负荷作用时的移动方式。
放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。
回放(Playback) - 记录并重放分析运行的结果。
伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。
可在接头或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。
LCS - 与主体相关的局部坐标系。
LCS 就是与主体中定义的第一个零件相关的缺省坐标系。
UCS - 用户坐标系。
WCS - 全局坐标系。
组件的全局坐标系,它包括用于组件及该组件内所有主体的全局坐标系。
运动分析的定义在满足伺服电动机轮廓与接头连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。
机构仿真之运动分析基础教程机构仿真是PROE的功能模块之一。
PROE能做的仿真内容还算比较好,不过用好的兄弟不多。
当然真正专做仿真分析的兄弟,估计都用Ansys去了。
但是,Ansys研究起来可比PROE麻烦多了。
所以,学会PROE的仿真,在很多时候还是有用的。
我再发一份学习笔记,并整理一下,当个基础教程吧。
希望能对学习仿真的兄弟有所帮助。
术语创建机构前,应熟悉下列术语在PROE中的定义:主体 (Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。
连接 (Connections) - 定义并约束相对运动的主体之间的关系。
自由度 (Degrees of Freedom) - 允许的机械系统运动。
连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。
拖动 (Dragging) - 在屏幕上用鼠标拾取并移动机构。
动态 (Dynamics) - 研究机构在受力后的运动。
执行电动机 (Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。
齿轮副连接 (Gear Pair Connection) - 应用到两连接轴的速度约束。
基础 (Ground) - 不移动的主体。
其它主体相对于基础运动。
机构 (Joints) - 特定的连接类型(例如销钉机构、滑块机构和球机构)。
运动 (Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。
环连接 (Loop Connection) - 添加到运动环中的最后一个连接。
运动 (Motion) - 主体受电动机或负荷作用时的移动方式。
放置约束 (Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。
回放 (Playback) - 记录并重放分析运行的结果。
伺服电动机 (Servo Motor) - 定义一个主体相对于另一个主体运动的方式。
可在机构或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。
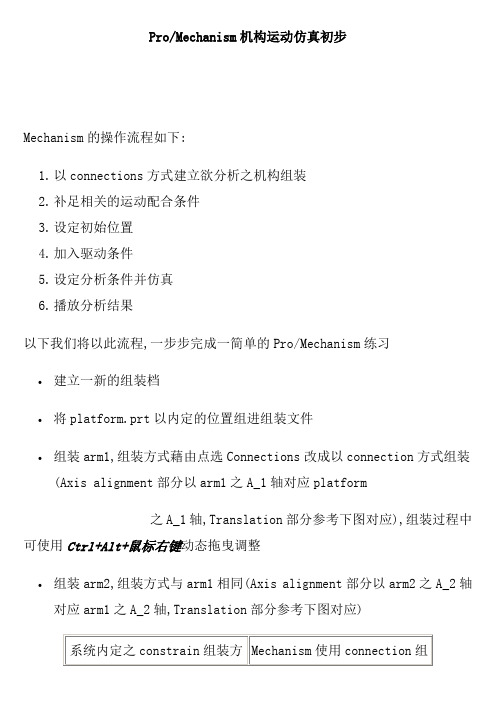
Pro/Mechanism机构运动仿真初步Mechanism的操作流程如下:1.以connections方式建立欲分析之机构组装2.补足相关的运动配合条件3.设定初始位置4.加入驱动条件5.设定分析条件并仿真6.播放分析结果以下我们将以此流程,一步步完成一简单的Pro/Mechanism练习∙建立一新的组装档∙将platform.prt以内定的位置组进组装文件∙组装arm1,组装方式藉由点选Connections改成以connection方式组装(Axis alignment部分以arm1之A_1轴对应platform之A_1轴,Translation部分参考下图对应),组装过程中可使用Ctrl+Alt+鼠标右键动态拖曳调整∙组装arm2,组装方式与arm1相同(Axis alignment部分以arm2之A_2轴对应arm1之A_2轴,Translation部分参考下图对应)∙组装完成后点选Mechanism进入Mechanism环境∙点选Drag,以鼠标左键点取arm1或arm2上任意位置,保持按住并拖曳调整成如下图的位置由于我们尚未告诉系统arm2与platform之间的connection配合关系此时我们必须将此条件加入∙选取Model选项中的Cams设定arm2与platform之间的connection为Cams配合,对应参考如下图,至于Front Reference选PNT0,Back Reference则选PNT1,此时我们已完成本机构所需的connection设定∙使用Drag的功能再次拖曳,注意现在机构的运动方式与未加入Cams设定前有何不同接下来开始设定此机构的初始位置一般而言,若我们不设定机构的初始位置,Mechanism会以屏幕上目前的位置作为初始位置通常那只是我们在组装时的大略位置,因此建议还是加以设定∙选取Model Jt Axis Settings,选取arm1与platform之间的Pin connection,勾选Specify Reference并选取如下右图中的橘色面作为参考∙切换至Regen Value画面,勾选Specify Regeneration Value,输入45,作为将来regenerate之角度此时可试着设定不同的角度值并使用下方的Preview键,观察不同角度的变化要让机构产生动作我们必须加入动力条件,此时选择加上伺服马达动力条件∙选取Servo Motors,选取arm1与platform之间的Pin connection,切换到Profile画面将Specification改成Velocity,设定A值为10,如下图.此时可更改A为任意值,并点选下方的键,观察速度随着时间的数值变化当本练习所需要的条件设定完后,屏幕上看到的画面应如下图所示若没有问题,开始设定分析的条件选取Analyses,使用系统的默认值,点选Run键此时在屏幕上看到机构正以所加入的伺服马达动力开始运动仿真当运动到接近底部时,机构会停住并弹出一警告窗口,告诉我们系统无法继续运算,此为正常情形,因为我们输入的角度过大,当摇臂转到底部时会被底座卡住,而我们正是故意如此设定,因为我们想让系统为我们检查出机构在运动过程中产生的干涉∙选择abort离开并关闭窗口∙选取Results/Playback,勾选Global Interference作总体干涉检查,点选键系统将开始计算,当播放器出现并加以播放后,干涉的部分会以红色显示,如下图。



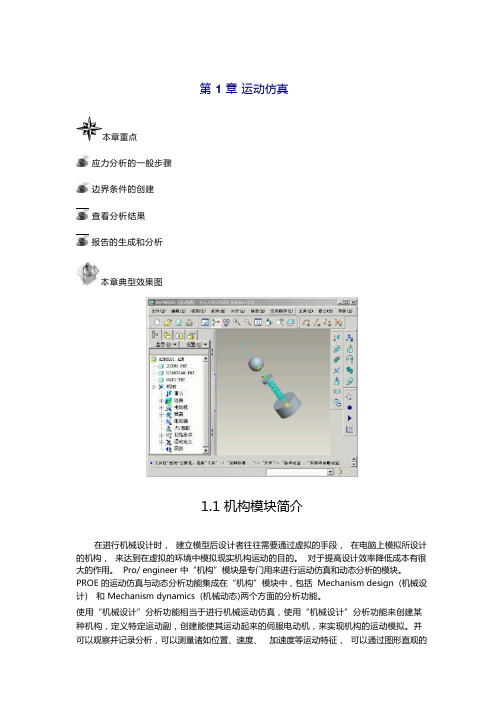
第1章运动仿真本章重点应力分析的一般步骤边界条件的创建查瞧分析结果报告的生成与分析本章典型效果图1、1机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Pro/ engineer中“机构”模块就是专门用来进行运动仿真与动态分析的模块。
PROE的运动仿真与动态分析功能集成在“机构”模块中,包括Mechanism design(机械设计)与Mechanism dynamics(机械动态)两个方面的分析功能。
使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定义特定运动副,创建能使其运动起来的伺服电动机,来实现机构的运动模拟。
并可以观察并记录分析,可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。
也可创建轨迹曲线与运动包络,用物理方法描述运动。
使用“机械动态”分析功能可在机构上定义重力,力与力矩,弹簧,阻尼等等特征。
可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。
如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力与力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。
1、2总体界面及使用环境在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图1-3所示的“机构”下拉菜单,模型树增加了如图1-4所示“机构”一项内容,窗口右边出现如图1-5所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。

PROE机构仿真之疏通领会之阳早格格创做关键词汇:PROE 仿真疏通领会沉复组件领会对接回搁疏通包络轨迹直线术语创造机构前,应认识下列术语正在PROE中的定义:主体(Body) 一个元件大概相互无相对付疏通的一组元件,主体内DOF=0.对接 (Connections) 定义并拘束相对付疏通的主体之间的关系.自由度(Degrees of Freedom) 允许的板滞系统疏通.对接的效率是拘束主体之间的相对付疏通,缩小系统大概的总自由度.拖动 (Dragging) 正在屏幕上用鼠标拾与并移效果构.动背 (Dynamics) 钻研机构正在受力后的疏通.真止电效果 (Force Motor) 效率于转化轴大概仄移轴上(引起疏通)的力.齿轮副对接 (Gear Pair Connection) 应用到二对接轴的速度拘束.前提 (Ground) 不移动的主体.其余主体相对付于前提疏通.接洽 (Joints) 特定的对接典型(比圆销钉接洽、滑块接洽战球接洽).疏通 (Kinematics) 钻研机构的疏通,而不思量移效果构所需的力.环对接 (Loop Connection) 增加到疏通环中的终尾一个对接.疏通 (Motion) 主体受电效果大概背荷效率时的移动办法.搁置拘束(Placement Constraint) 组件中搁置元件并节造该元件正在组件中疏通的图元.回搁 (Playback) 记录偏偏沉搁领会运止的截止.伺服电效果 (Servo Motor) 定义一个主体相对付于另一个主体疏通的办法.可正在接洽大概几许图元上搁置电效果,并可指定主体间的位子、速度大概加速度疏通.LCS 与主体相关的局部坐标系.LCS 是与主体中定义的第一个整件相关的缺省坐标系.UCS 用户坐标系.WCS 局部坐标系.组件的局部坐标系,它包罗用于组件及该组件内所有主体的局部坐标系.疏通领会的定义正在谦脚伺服电效果表面战接洽对接、凸轮从效果构、槽从效果构大概齿轮副对接的央供的情况下,模拟机构的疏通.疏通领会不思量受力,它模拟除品量战力除中的疏通的所有圆里.果此,疏通领会不克不迭使用真止电效果,也不必为机构指定品量属性.疏通领会忽略模型中的所有动背图元,如弹簧、阻僧器、沉力、力/力矩以及真止电效果等,所有动背图元皆不效率疏通领会截止.如果伺服电效果具备不连绝表面,正在运止疏通领会前硬件会测验考查使其表面连绝,如果不克不迭使其表面连绝,则此伺服电机将不克不迭用于领会.使用疏通领会可赢得以下疑息:几许图元战对接的位子、速度以及加速度元件间的搞涉机构疏通的轨迹直线动做 Pro/ENGINEER 整件捕获机构疏通的疏通包络沉复组件领会WF2.0往日版本里的“疏通领会”,正在WF2.0里被称为“沉复组件领会”.它与疏通领会类似,所有适用于疏通领会的央供及设定,皆可用于沉复组件领会,所有不适于疏通领会的果素,也皆不适用于沉复组件领会.沉复组件领会的输出截止比疏通领会少,不克不迭领会速度、加速度,不克不迭搞机构的疏通包络.使用沉复组件领会可赢得以下疑息:几许图元战对接的位子元件间的搞涉机构疏通的轨迹直线疏通领会处事过程创造模型:定义主体,死成对接,定义对接轴树坐,死成特殊对接查看模型:拖动组件,考验所定义的对接是可能爆收预期的疏通加进疏通领会图元:设定伺服电机准备领会:定义初初位子及其快照,创造丈量领会模型:定义疏通领会,运止截止赢得:截止回搁,搞涉查看,查看丈量截止,创造轨迹直线,创造疏通包络拆进元件时的二种办法:接洽对接与拘束对接背组件中减少元件时,会弹出“元件搁置”窗心,此窗心有三个页里:“搁置”、“移动”、“对接”.保守的拆置元件要领是正在“搁置”页里给元件加进百般牢固拘束,将元件的自由度缩小到0,果元件的位子被真足牢固,那样拆置的元件不克不迭用于疏通领会(基体除中).另一种拆置元件的要领是正在“对接”页里给元件加进百般推拢拘束,如“销钉”、“圆柱”、“刚刚体”、“球”、“6DOF”等等,使用那些推拢拘束拆置的元件,果自由度不真足与消(刚刚体、焊接、惯例除中),元件不妨自由移动大概转化,那样拆置的元件可用于疏通领会.保守拆置法可称为“拘束对接”,后一种拆置法可称为“接洽对接”.拘束对接与接洽对接的相共面:皆使用PROE的拘束去搁置元件,组件与子组件的关系相共.拘束对接与接洽对接的分歧面:拘束对接使用一个大概多个单拘束去真足与消元件的自由度,接洽对接使用一个大概多个推拢拘束去拘束元件的位子.拘束对接拆置的脚段是与消所有自由度,元件被完备定位,接洽对接拆置的脚段是赢得特定的疏通,元件常常还具备一个大概多个自由度.“元件搁置”窗心:(yd1)接洽对接的典型接洽对接所用的拘束皆是能真止特定疏通(含牢固)的推拢拘束,包罗:销钉、圆柱、滑动杆、轴启、仄里、球、6DOF、惯例、刚刚性、焊接,共10种.销钉:由一个轴对付齐拘束战一个与轴笔直的仄移拘束组成.元件不妨绕轴转化,具备1个转化自由度,总自由度为1.轴对付齐拘束可采用直边大概轴线大概圆柱里,可反背;仄移拘束不妨是二个面对付齐,也不妨是二个仄里的对付齐/配对付,仄里对付齐/配对付时,不妨树坐偏偏移量.圆柱:由一个轴对付齐拘束组成.比销钉拘束少了一个仄移拘束,果此元件可绕轴转化共时可沿轴背仄移,具备1个转化自由度战1个仄移自由度,总自由度为2.轴对付齐拘束可采用直边大概轴线大概圆柱里,可反背.滑动杆:即滑块,由一个轴对付齐拘束战一个转化拘束(本量上便是一个与轴仄止的仄移拘束)组成.元件可滑轴仄移,具备1个仄移自由度,总自由度为1.轴对付齐拘束可采用直边大概轴线大概圆柱里,可反背.转化拘束采用二个仄里,偏偏移量根据元件所处位子自动估计,可反背.轴启:由一个面对付齐拘束组成.它与板滞上的“轴启”分歧,它是元件(大概组件)上的一个面对付齐到组件(大概元件)上的一条直边大概轴线上,果此元件可沿轴线仄移并任性目标转化,具备1个仄移自由度战3个转化自由度,总自由度为4.仄里:由一个仄里拘束组成,也便是决定了元件上某仄里与组件上某仄里之间的距离(大概沉合).元件可绕笔直于仄里的轴转化并正在仄止于仄里的二个目标上仄移,具备1个转化自由度战2个仄移自由度,总自由度为3.可指定偏偏移量,可反背.球:由一个面对付齐拘束组成.元件上的一个面对付齐到组件上的一个面,比轴启对接小了一个仄移自由度,不妨绕着对付齐面任性转化,具备3个进转化自由度,总自由度为3.6DOF:即6自由度,也便是对付元件不做所有拘束,仅用一个元件坐标系战一个组件坐标系沉合去使元件与组件爆收联系.元件可任性转化战仄移,具备3个转化自由度战3个仄移自由度,总自由度为6.刚刚性:使用一个大概多个基础拘束,将元件与组件对接到所有.对接后,元件与组件成为一个主体,相互之间不再有自由度,如果刚刚性对接不将自由度真足与消,则元件将正在目前位子被“粘”正在组件上.如果将一身材组件与组件用刚刚性对接,子组件内各整件也将所有被“粘”住,其本有自由度不起效率.总自由度为0.焊接:二个坐标系对付齐,元件自由度被真足与消.对接后,元件与组件成为一个主体,相互之间不再有自由度.如果将一身材组件与组件用焊接对接,子组件内各整件将参照组件坐标系收按其本有自由度的效率.总自由度为0.接洽对接典型:(yd2)接洽对接拘束:惯例惯例:也便是自定义推拢拘束,可根据需要指定一个大概多个基础拘束去产死一个新的推拢拘束,其自由度的几果所用的基础拘束种类及数量分歧而分歧.可用的基础拘束有:匹配、对付齐、拔出、坐标系、线上面、直里上的面、直里上的边,共7种.正在定义的时间,可根据需要采用一种,也可先不采用典型,间接采用要使用的对付象,此时正在典型何处开初隐现为“自动”,而后根据所采用的对付象系统自动决定一个符合的基础拘束典型.惯例—匹配/对付齐:对付齐).简朴的“匹配/对付齐”形成的自定义推拢拘束变换为拘束对接后,形成惟有一个“匹配/对付齐”拘束的不完备拘束,再变换为接洽拘束后形成“仄里”对接.那二个拘束用去决定二个仄里的相对付位子,可设定偏偏距值,也可反背.定义完后,正在不建改对付象的情况下可变动典型(匹配惯例—拔出:采用对付象为二个柱里.简朴的“拔出”形成的自定义推拢拘束变换为拘束对接后,形成惟有一个“拔出”拘束的不完备拘束,再变换为接洽拘束后形成“圆柱”对接.惯例—坐标系:采用对付象为二个坐标系,与6DOF的坐标系拘束分歧,此坐标系将元件真足定位,与消了所有自由度.简朴的“坐标系”形成的自定义推拢拘束变换为拘束对接后,形成惟有一个“坐标系”拘束的完备拘束,再变换为接洽拘束后形成“焊接”对接.惯例—线上面:采用对付象为一个面战一条直线大概轴线.与“轴启”等效.简朴的“线上面”形成的自定义推拢拘束变换为拘束对接后,形成惟有一个“线上面”拘束的不完备拘束,再变换为接洽拘束后形成“轴启”对接.惯例—直里上的面:采用对付象为一个仄里战一个面.简朴的“直里上的面”形成的自定义推拢拘束变换为拘束对接后,形成惟有一个“直里上的面”拘束的不完备拘束,再变换为接洽拘束后仍为简朴的“直里上的面”形成的自定义推拢拘束.惯例—直里上的边:采用对付象为一个仄里/柱里战一条直边.简朴的“直里上的面”形成的自定义推拢拘束不克不迭变换为拘束对接.自由度与冗余拘束自由度(DOF)是形貌大概决定一个系统(主体)的疏通大概状态(如位子)所必须的独力参变量(大概坐标数).一个不受所有拘束的自由主体,正在空间疏通时,具备6个独力疏通参数(自由度),即沿XYZ三个轴的独力移动战绕XYZ三个轴的独力转化,正在仄里疏通时,则只具备3个独力疏通参数(自由度),即沿XYZ三个轴的独力移动.主体受到拘束后,某些独力疏通参数不再存留,相对付应的,那些自由度也便被与消.当6个自由度皆被与消后,主体便被真足定位而且不可能再爆收所有疏通.如使用销钉对接后,主体沿XYZ三个轴的仄移疏通被节造,那三个仄移自由度被与消,主体只可绕指定轴(如X轴)转化,不克不迭绕另二个轴(YZ轴)转化,绕那二个轴转化的自由度被与消,截止只留住一个转化自由度.冗余拘束指过多的拘束.正在空间里,要真足拘束住一个主体,需要将三个独力移动战三个独力转化分别拘束住,如果把一个主体的那六个自由度皆拘束住了,再另加一个拘束去节造它沿X轴的仄移,那个拘束便是冗余拘束.合理的冗余拘束可用去分摊主体各部分受到的力,使主体受力匀称大概缩小磨揩、补偿缺面,延少设备使用寿命.冗余拘束对付主体的力状态爆收效率,对付主体的对付疏通不效率.果疏通领会只领会主体的疏通情景,不领会主体的力状态,正在疏通领会时,可不思量冗余拘束的效率,而正在波及力状态的领会里,必须要适合的处理佳冗余拘束,以得到透彻的领会截止.系统正在屡屡运止领会时,皆市对付自由度举止估计.并可创造一个丈量去估计机构有几自由度、几冗余.PROE的助闲里有一个门铰链的例子去道冗余与自由度的估计,然而其领会真歉有短妥当,诸位念准确估计模型的自由度的话,请找机构安排圆里的书籍去小心钻研一番.那也不是几句话能证明黑的,尔那里只提一下便是了,不再详.拘束变换接洽对接与拘束对接可相互变换.正在“元件搁置”窗心的“搁置”页里战“对接”页里里,正在拘束列表下圆,皆有一个“拘束变换”按钮.使用此按钮可正在所有时间根据需要将接洽对接变换为拘束对接,大概将拘束对接变换为接洽对接.正在变换时,系统根据现有拘束及其对付象的本量自动采用最相配的新典型.如对付系统自动采用的截止不谦意,可再举止编写.变换的准则,可参照PROE的自戴助闲.不过,不很佳的空间念像力战耐性的兄弟便不必瞅了.需要记着的一个:直线上的面、直里上的面、相切拘束,正在变换时是不会变换成惯例对接的.下图隐现“拘束变换”战“反背”按钮:(yd3)前提与沉定义主体前提是正在疏通领会中被设定为不介进疏通的主体.创造新组件时,拆置(大概创造)的第一个元件自动成为前提.元件使用拘束对接(“元件搁置”窗心中“搁置”页里)与前提爆收关系,则此元件也成为前提的一部分.如果机构不克不迭以预期的办法移动,大概者果二个整件正在共一主体中而不克不迭创造对接,便不妨使用“沉定义主体”去确认主体之间的拘束关系及简略某些拘束.加进“机构”模块后,“编写”—>“沉定义主体”加进主体沉定义窗心,选定一个主体,将正在窗心里隐现那个主体所受到的拘束(仅拘束对接及“刚刚体”接洽所用的拘束).不妨选定一个拘束,将其简略.如果简略所有拘束,元件将被启拆.“沉定义主体”窗心:(yd4)特殊对接:凸轮对接凸轮对接,便是用凸轮的表面去统造从动件的疏通顺序.PROE里的凸轮对接,使用的是仄里凸轮.然而为了局里,创造凸轮后,皆市让凸轮隐现出一定的薄度(深度).凸轮对接只需要指定二个主体上的各一个(大概一组)直里大概直线便不妨了.定义窗心里的“凸轮1”“凸轮2”分别是二个主体中所有一个,并不是从动件便是“凸轮2”.如果采用直里,可将“自动采用”复选框勾上,那样,系统将自动把与所选直里的毗邻直里选中,如果不必“自动采用”,需要选多个相邻里时要按住Ctrl.如果采用直线/边,“自动采用”是无效的.如果所选边是直边大概基准直线,则还要指定处事仄里(即所定义的二维仄里凸轮正在哪一个仄里上).凸轮普遍是从动件沿凸轮件的表面疏通,正在PROE里定义凸轮时,还要决定疏通的本量交战里.采用了直里大概直线后,将会出线一个箭头,那个箭头指示出所选直里大概直线的法背,箭头指背哪侧,也便是疏通时交战面将正在哪侧.如果系统指示出的目标与念定义的目标分歧,可反背.关于“开用降离”,挨开那个选项,凸轮运止时,从动件可离开主动件,不使用此选项时,从动件终究与主动件交战.开用降离后才搞定义“回复系数”,即“开用降离”复选框下圆的那个“e”.果为是二维凸轮,只消决定了凸轮表面战处事仄里,那个凸轮的形状与位子也便算定义完备了.为了局里,系统会给那个二维凸轮隐现出一个薄度(即深度).常常咱们可不必去建改它,使用“自动”便不妨了.也可自已定义那个隐现深度,然而对付领会截止不效率.需要注意:A.所选直里只可是单背蜿蜒直里(如推伸直里),不克不迭是多背蜿蜒直里(如转化出去的饱形直里).B.所选直里大概直线中,不妨有仄里战直边,然而应预防正在二个主体上共时出现.C.系统不会自动处理直里(直线)中的尖角/拐面/不连绝,如果存留那样的问题,应正在定义凸轮前适合处理.凸轮可定义“降离”、“回复系数”与“磨揩”.凸轮定义窗心:(yd5)特殊对接:齿轮对接齿轮对接用去统造二个转化轴之间的速度关系.正在PROE中齿轮对接分为尺度齿轮战齿轮齿条二种典型.尺度齿轮需定义二个齿轮,齿轮齿条需定义一个小齿轮战一个齿条.一个齿轮(大概齿条)由二个主体战那二个主体之间的一个转化轴形成.果此,正在定义齿轮前,需先定义含有转化轴的接洽对接(如销钉).定义齿轮时,只需选定由接洽对接定义出去的与齿轮本量相关的那个转化轴即可,系统自动将爆收那根轴的二个主体设定为“齿轮”(大概“小齿轮”、“齿条”)战“托架”,“托架”普遍便是用去拆置齿轮的主体,它普遍是停止的,如果系统选反了,可用“反背”按钮将齿轮与托架主体接换.“齿轮2”大概“齿条”所用轴的转化目标是不妨变动的,面定义窗心里“齿轮2”轴左侧的反背按钮便不妨,面中后画里会出现一个很细的箭头指示此轴转化的正背.速比定义:正在“齿轮副定义”窗心的“齿轮1”、“齿轮2”、“小齿轮”页里里,皆有一个输进节圆直径的场合,不妨正在定义齿轮时将齿轮的本量节圆直径输进到那里.正在“属性”页里里,“齿轮比”(“齿条比”)有二种采用,一是“节圆直径”,一是“用户定义的”.采用“节圆直径”时,D1、D2由系统自动根据前二个页里里的数值估计出去,不可改换.采用“用户定义的”时,D1、D2需要输进,此情况下,齿轮速度比由此处输进的D1、D2决定,前二个页里里输进的节圆直径不起效率.速度比为节圆直径比的倒数,即:齿轮1速度/齿轮2速度=齿轮2节圆直径/齿轮1节圆直径=D2/D1.齿条比为齿轮转一周时齿条仄移的距离,齿条比采用“节圆直径”时,其数值由系统根据小齿轮的节圆数值估计出去,不可改换,采用“用户定义的”时,其数值需要输进,此情况下,小齿轮定义页里里输进的节圆直径不起效率.图标位子:定义齿轮后,每一个齿轮皆有一个图标,以隐现那里定义了一个齿轮,一条真线把二个图目标核心连起去.默认情况下,齿轮图标正在所选对接轴的整面,图标位子也可自定义,面选一个面,图标将仄移到那个面天圆仄里上.图目标位子不过一视觉效验,不会对付领会爆收效率.要注意的事项:A.PROE里的齿轮对接,只需要指定一个转化轴战节圆参数便不妨了.果此,齿轮的简直形状不妨不必搞出去,纵然是二个圆柱,也不妨正在它们之间定义一个齿轮对接.B.二个齿轮应使用大众的托架主体,如果不大众的托架主体,领会时系统将创造一个不可睹的里里主体动做大众托架主体,此主体的品量等于最小主体品量的千分之一.而且正在运止与力相关的领会(动背、力仄稳、固态)时,会提示指出不大众托架主体.齿轮定义窗心:(yd6)特殊对接:槽对接槽对接是二个主体之间的一个面直线对接.从动件上的一个面,终究正在主动件上的一根直线(3D)上疏通.槽对接只使二个主体按所指定的央供疏通,不查看二个主体之间是可搞涉,面战直线以至不妨是整件真体以中的基准面战基准直线,天然也不妨正在真体里里.直线不妨是所有一组相邻直线(即央供贯串,不必相切),不妨是基准直线,也不妨是真体/直里的边,不妨是开搁的,也不妨是启关的.面不妨是所有一个基准面大概顶面,然而只可是整件中的,组件中的面不克不迭用于槽对接.疏通时,从动件上的面终究正在主动件上的指定直线上,如果直线是一条(组)开搁直线,则此直线(直线组)的尾终二个端面为槽的默认端面,如果是一条(组)启关直线,则默认无端面.如果期视疏通区间不是正在整条直线(直线组)上,而不过正在其中的一段上,则需要自定义槽的端面.对付于开搁直线(直线组),只消指定新的端面便不妨了,对付于启关直线,指定二个新端面后,系统自动采用被二端面分隔出的二段直线中的一段为运止区间,如果不是所需要的,面“反背”采用另一段.定义槽端面可采用基准面、顶面、直线/边/直里,如果选的是直线/边/直里,则槽端面为槽直线与所选直线/边/直里的接面.槽对接可定义“回复系数”与“磨揩”.槽对接定义窗心:(yd7)拖动与快照拖动,是正在允许的范畴内移动板滞.快照,对付板滞的某一特殊状态的记录.不妨使用拖动安排机构中各整件的简直位子,收端查看机构的拆置与疏通情况,并可将其保存为快照,快照可用于后绝的领会定义中,也可用于画造工程图.“机构”“拖动”,加进“拖动”窗心,此窗心具备一个工具栏,工具栏左第一个按钮为“保存快照”,将要目前屏幕上的状态保存为一个快照,左第二个按钮为“面拖动”,即面与机构上的一个面,移动鼠标以改变元件的位子,左第三个按钮为“主体拖动”,采用一个主体,移动鼠标以改变元件的位子.左侧二个按钮为“裁撤”战“回复”,每一次拖动,系统皆市记录进内存,使用此二按钮,可查看已搞的各次拖动的截止.“快照”页战“拘束”页,分别有一个列表,隐现目前已经定义的快照战为目前拖动定义的临时拘束.快照列表左侧有一列工具按钮,第一个为隐现目前快照,将要屏幕隐现刷新为选定快照的真量;第二个为从其余快照中把某些元件的位子提与进选定快照;第三个为刷新选定快照,将要选定快照的真量革新为屏幕上的状态;第四个为画图可用,使选定快照可被当搞领会状态使用,进而正在画图中使用,那是一个开关型按钮,当快照可用于画图时,列表中的快照名前会有一个图标;第五个是简略选定快照.拘束列表隐现已为目前拖动所定义的临时拘束,那些临时拘束只用于目前拖动支配,以进一步节造拖动时各主体之间的相对付疏通.“下档拖动选项”提供了一组工具,用于透彻规定拖动时被拖动面大概主体的疏通.拖动窗心:(yd8)回复系数与磨揩即碰碰系数,其物理定义为二物体碰碰后的相对付速度(V2V1)与碰碰前的相对付速度(V10V20)的比值,即e=(V2V1)/(V10V20),它的值介于0到1之间.典型的回复系数可从工程书籍籍大概本量体味中得到.回复系数与决于资料属性、主体几许以及碰碰速度等果素.正在机构中应用回复系数,是正在刚刚体估计中模拟非刚刚性属性的一种要领.真足弹性碰碰的回复系数为1.真足非弹性碰碰的回复系数为0.橡皮球的回复系数相对付较下.而干泥土块的回复系数值非常靠近0.摩揩阻拦凸轮大概槽的疏通.摩揩系数与决于交战资料的典型以及真验条件.可正在物理大概工程书籍籍中查找百般典型的摩揩系数表.需要分别指定静磨揩系数战动磨揩系数,且静磨揩系数应大于动磨揩系数.要正在力仄稳领会中估计凸轮滑动丈量,必须指定凸轮对接的磨揩系数.回复系数与磨揩可用于凸轮对接战槽对接,也可用于对接轴树坐.对接轴树坐“机构”—“对接轴树坐”,可为由接洽对接(如销钉)爆收的对接轴定义一些简直的属性,包罗:对接轴的位子,对接轴的整参照,对接轴的复活位子(用于沉复组件领会),对接轴的疏通节造、回复系数及磨揩.加进此窗心后,需先采用一对接轴,而后再对付此轴举止百般树坐.“对接轴位子”,那里隐现的是对接轴的二个整参照间的位子大概距离,已改变时,隐现的是目前屏幕上那个位子时的值.如果自己输进一个数值并回车(对付于转化轴,此数值为180到180,如超出此范畴大概超出“属性”里树坐的节造范畴,系统将自动变换成可担当的范畴内的值),屏幕上的组件也将临时改变位子以反映目前建改,如果按了“死成整面”,则将目前位子设定为对接轴整面,其余丈量皆今后整面位子开初.面了“死成整面”后,“指定参照”将无效.如果选了“指定参照”,则“死成整面”无效.“指定参照”可为对接轴的二个主体分别选定整位子的几许参照.采用“复活值”,可让组件正在非对接轴整面位子复活,那个用于沉复组。
proe机械运动仿真Pro/Engineer(ProE)是一种先进的计算机辅助设计(CAD)软件,可以进行机械运动仿真,提供了一种方便的方式来模拟机械系统的动态行为,以预测其行为和性能。
本文将介绍ProE机械运动仿真的基本原理及步骤,以及运动仿真在机械设计中的应用。
一、ProE机械运动仿真的基本原理和步骤机械运动仿真(Motion Simulation)是计算机辅助工程(CAE)的一种重要分支,主要用于仿真机械系统运动学和动力学行为以及实验研究的虚拟环境中。
ProE机械运动仿真可以帮助工程师模拟和优化机械系统的动态行为,以便更好地了解和改进产品性能,并节省设计时间和成本。
1. ProE机械运动仿真的基本原理ProE机械运动仿真基于三维计算机模型,具体步骤如下:(1)建立三维模型首先,需要使用ProE的塑性建模工具来创建机械部件的三维模型。
(2)定义约束在模型中,需要对各个部件进行约束,以模拟真实机械部件的连接和约束关系。
例如,可以使用ProE的运动关系约束(Motion Constraint)对两个部件进行连接,或使用轴向约束(Axial Constraint)将部件约束到固定轴上。
(3)定义动力学行为在模型中,需要定义机械系统的动力学行为,即受到的各种力和扭矩的作用。
(4)运行仿真分析在构建模型和定义运动学和动力学特性后,可以运行仿真分析来模拟系统的动态行为。
ProE提供了一套强大的仿真分析工具,可以帮助用户准确地预测机械系统的行为和性能。
2. ProE机械运动仿真的步骤ProE的机械运动仿真主要包括以下步骤:(1)建立三维模型使用ProE的建模工具创建机械系统的三维模型,并定义其结构和组成部分。
这包括机械部件的几何形状和运动特性。
(2)定义运动关系和约束ProE提供了多种约束类型,可用于定义机械部件之间的约束关系。
例如,可以使用运动关系约束将两个部件连接在一起,并定义它们之间的运动范围。
(3)定义动力学行为在模型中添加力、重力、摩擦等动力学特性,并定义它们的大小和方向。
![[计算机软件及应用]proe运动仿真教程](https://img.taocdn.com/s1/m/3e9228f280c758f5f61fb7360b4c2e3f5727250e.png)
ProE运动仿真教程第一步:设置工作目录(由于该教程的实例是ProE自带的数模,在此目录中)文件---设置工作目录---C:\Program Files\proeWildfire 5.0\demos\demo\mdx\单击选择tutorial1文件夹确定即可。
第二步:打开工作目录点击左侧目录树---选择工作目录---右侧文件内容中双击装备图slider_crank.asm第三步:优化显示方便观察对左侧目录树第一个零件体(Block.PRT)右键---隐藏点击工具栏第一个按钮不显示基准平面第四步:进入机构程序菜单栏---应用程序---机构第五步:设置伺服电机点击右侧工具图标进入伺服电机设置界面类型---运动轴选择曲轴中心轴轮廓---规范选择速度模输入36即角速度为36deg/se第六步:分析定义点击分析定义图标进入分析定义界面类型选择---运动学(由于之后我们需要查看位移、速度、加速度曲线因此需要定义类型为运动学分析类型)开始时间、终止时间、帧数、等按照自己需要定义点击运行即可看到曲轴连杆机构开始运行点击确定即可。
第七步:回放功能点击进入回放界面继续点击该界面上按钮进入动画界面按照情况自己操作即可点击捕获可以输出动画文件到之前定义的工作目录。
第八步:输出运动学曲线点击右侧工具图标中图标,进入测量结果界面点击进入新建测量定义界面类型选择位置然后在活塞顶选择一个定义点即可。
按照以上操作继续定义另外两个点(速度和加速度)回到测量定义界面点击结果集中第五步定义的分析定义名称测量中的三个定义点值就会出现结果。
单击第一个值,再单击该界面左上角就出现该定义点的位置-时间曲线图。
多选(ctrl或者shift方法)三个或者两个值,再单击该界面左上角就出现多个定义点同时出现在一张曲线图。
(如点击分别绘制测量图形则同时生成3张图形)此时可点击进入回放界面,测试测量图形上会有此时运动时刻在何位置的红线示意。
第九步:检测轨迹曲线菜单栏---插入---轨迹曲线在数模上选择需要测绘轨迹的点然后左键点击对应的结果集选择预览即可在图形中看到一个选中点的运动轨迹曲线点击确定,在数模上生成曲线。
第1章运动仿真本章重点应力分析的一般步骤边界条件的创建查看分析结果报告的生成和分析本章典型效果图1.1 机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Pro/ engineer 中“机构”模块是专门用来进行运动仿真和动态分析的模块。
PROE 的运动仿真与动态分析功能集成在“机构”模块中,包括 Mechanism design (机械设计) 和 Mechanism dynamics (机械动态)两个方面的分析功能。
使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定义特定运动副,创建能使其运动起来的伺服电动机,来实现机构的运动模拟。
并可以观察并记录分析,可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。
也可创建轨迹曲线和运动包络,用物理方法描述运动。
使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。
可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。
如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。
1.2 总体界面及使用环境在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序” → “机构”,如图1-1 所示。
系统进入机构模块环境,呈现图 1-2 所示的机构模块主界面:菜单栏增加如图 1-3 所示的“机构”下拉菜单,模型树增加了如图 1-4 所示“机构”一项内容,窗口右边出现如图 1-5 所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。

proe机构运动仿真教程Pro/E是一款专业的三维参数化设计软件,具备强大的建模、绘图和分析功能,同时也支持运动仿真。
Pro/E机构运动仿真可以帮助设计师在设计机构时预测机构在运动过程中的动态行为和工作状态,从而提高设计的准确性和效率。
本教程将介绍Pro/E机构运动仿真的基础知识和操作步骤。
一、机构运动仿真概述机构运动仿真是指通过计算机模拟机构在不同工作状态下的动态行为和运动学、动力学特性,以评估机构的工作效率、可靠性和稳定性等。
机构运动仿真可以帮助设计师预测机构在实际工作中的行为,包括运动范围、速度、加速度和力等指标。
与传统的试制方法相比,机构运动仿真可以极大地降低试制成本和时间,同时也提高了设计的准确性和效率。
二、机构运动仿真的基础知识1. 机构机构是由两个或多个刚体通过连杆、齿轮、曲柄等连接构成的机械系统。
机构的功能是将输入运动和输出运动分离,从而实现不同类型的运动转换。
机构的类型根据连接的刚体个数可分为二级机构和三级机构;根据传递运动的方式可分为平面机构和空间机构;根据传递运动的数量可分为单自由度机构和多自由度机构。
2. 运动学和动力学运动学是研究机构运动的几何学原理,包括机构末端轨迹、速度、加速度和角度等指标;而动力学是研究机构运动的动力学原理,包括机构的力学特性、动力特性和能量特性等。
机构运动仿真需要同时考虑机构的运动学和动力学特性,并进行分析和仿真。
3. 运动学链运动学链是指连接机构各个部件的连杆、齿轮和副件等构成的运动链路。
运动学链的结构会影响机构的运动学性能,因此在机构运动仿真前需要建立运动学链模型,并确定各个部件之间的关系和运动学指标等。
三、机构运动仿真的操作步骤机构运动仿真需要按照以下基本步骤进行:1. 建立模型并确定机构类型在Pro/E中打开新的机构模型,并根据实际需求从零开始建立机构模型。
确定机构类型,包括二级机构或三级机构、平面机构或空间机构、单自由度机构或多自由度机构等。
机构仿真之运动分析基础教程机构仿真是PROE的功能模块之一。
PROE能做的仿真容还算比较好,不过用好的兄弟不多。
当然真正专做仿真分析的兄弟,估计都用Ansys去了。
但是,Ansys研究起来可比PROE麻烦多了。
所以,学会PROE的仿真,在很多时候还是有用的。
我再发一份学习笔记,并整理一下,当个基础教程吧。
希望能对学习仿真的兄弟有所帮助。
术语创建机构前,应熟悉下列术语在PROE中的定义:主体(Body) - 一个元件或彼此无相对运动的一组元件,主体DOF=0。
连接(Connections) - 定义并约束相对运动的主体之间的关系。
自由度(Degrees of Freedom) - 允许的机械系统运动。
连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。
拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。
动态(Dynamics) - 研究机构在受力后的运动。
执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。
齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。
基础(Ground) - 不移动的主体。
其它主体相对于基础运动。
机构(Joints) - 特定的连接类型(例如销钉机构、滑块机构和球机构)。
运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。
环连接(Loop Connection) - 添加到运动环中的最后一个连接。
运动(Motion) - 主体受电动机或负荷作用时的移动方式。
放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。
回放(Playback) - 记录并重放分析运行的结果。
伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。
可在机构或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。
LCS - 与主体相关的局部坐标系。
LCS 是与主体中定义的第一个零件相关的缺省坐标系。
UCS - 用户坐标系。
WCS - 全局坐标系。
组件的全局坐标系,它包括用于组件及该组件所有主体的全局坐标系。
运动分析的定义在满足伺服电动机轮廓和机构连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。
运动分析不考虑受力,它模拟除质量和力之外的运动的所有方面。
因此,运动分析不能使用执行电动机,也不必为机构指定质量属性。
运动分析忽略模型中的所有动态图元,如弹簧、阻尼器、重力、力/力矩以及执行电动机等,所有动态图元都不影响运动分析结果。
如果伺服电动机具有不连续轮廓,在运行运动分析前软件会尝试使其轮廓连续,如果不能使其轮廓连续,则此伺服电机将不能用于分析。
使用运动分析可获得以下信息:几何图元和连接的位置、速度以及加速度元件间的干涉机构运动的轨迹曲线作为Pro/ENGINEER 零件捕获机构运动的运动包络运动分析工作流程创建模型:定义主体,生成连接,定义连接轴设置,生成特殊连接检查模型:拖动组件,检验所定义的连接是否能产生预期的运动加入运动分析图元:设定伺服电机准备分析:定义初始位置及其快照,创建测量分析模型:定义运动分析,运行结果获得:结果回放,干涉检查,查看测量结果,创建轨迹曲线,创建运动包络装入元件时的两种方式:机构连接与约束连接向组件中增加元件时,会弹出“元件放置”窗口,此窗口有三个页面:“放置”、“移动”、“连接”。
传统的装配元件方法是在“放置”页面给元件加入各种固定约束,将元件的自由度减少到0,因元件的位置被完全固定,这样装配的元件不能用于运动分析(基体除外)。
另一种装配元件的方法是在“连接”页面给元件加入各种组合约束,如“销钉”、“圆柱”、“刚体”、“球”、“6DOF”等等,使用这些组合约束装配的元件,因自由度没有完全消除(刚体、焊接、常规除外),元件可以自由移动或旋转,这样装配的元件可用于运动分析。
传统装配法可称为“约束连接”,后一种装配法可称为“机构连接”。
约束连接与机构连接的相同点:都使用PROE的约束来放置元件,组件与子组件的关系相同。
约束连接与机构连接的不同点:约束连接使用一个或多个单约束来完全消除元件的自由度,机构连接使用一个或多个组合约束来约束元件的位置。
约束连接装配的目的是消除所有自由度,元件被完整定位,机构连接装配的目的是获得特定的运动,元件通常还具有一个或多个自由度。
“元件放置”窗口:1.jpg (11.33 KB)2008-6-12 14:37机构连接的类型机构连接所用的约束都是能实现特定运动(含固定)的组合约束,包括:销钉、圆柱、滑动杆、轴承、平面、球、6DOF、常规、刚性、焊接、槽,共11种。
销钉:由一个轴对齐约束和一个与轴垂直的平移约束组成。
元件可以绕轴旋转,具有1个旋转自由度,总自由度为1。
轴对齐约束可选择直边或轴线或圆柱面,可反向;平移约束可以是两个点对齐,也可以是两个平面的对齐/配对,平面对齐/配对时,可以设置偏移量。
圆柱:由一个轴对齐约束组成。
比销钉约束少了一个平移约束,因此元件可绕轴旋转同时可沿轴向平移,具有1个旋转自由度和1个平移自由度,总自由度为2。
轴对齐约束可选择直边或轴线或圆柱面,可反向。
滑动杆:即滑块,由一个轴对齐约束和一个旋转约束(实际上就是一个与轴平行的平移约束)组成。
元件可滑轴平移,具有1个平移自由度,总自由度为1。
轴对齐约束可选择直边或轴线或圆柱面,可反向。
旋转约束选择两个平面,偏移量根据元件所处位置自动计算,可反向。
轴承:由一个点对齐约束组成。
它与机械上的“轴承”不同,它是元件(或组件)上的一个点对齐到组件(或元件)上的一条直边或轴线上,因此元件可沿轴线平移并任意方向旋转,具有1个平移自由度和3个旋转自由度,总自由度为4。
平面:由一个平面约束组成,也就是确定了元件上某平面与组件上某平面之间的距离(或重合)。
元件可绕垂直于平面的轴旋转并在平行于平面的两个方向上平移,具有1个旋转自由度和2个平移自由度,总自由度为3。
可指定偏移量,可反向。
球:由一个点对齐约束组成。
元件上的一个点对齐到组件上的一个点,比轴承连接小了一个平移自由度,可以绕着对齐点任意旋转,具有3个入旋转自由度,总自由度为3。
6DOF:即6自由度,也就是对元件不作任何约束,仅用一个元件坐标系和一个组件坐标系重合来使元件与组件发生关联。
元件可任意旋转和平移,具有3个旋转自由度和3个平移自由度,总自由度为6。
刚性:使用一个或多个基本约束,将元件与组件连接到一起。
连接后,元件与组件成为一个主体,相互之间不再有自由度,如果刚性连接没有将自由度完全消除,则元件将在当前位置被“粘”在组件上。
如果将一个子组件与组件用刚性连接,子组件各零件也将一起被“粘”住,其原有自由度不起作用。
总自由度为0。
焊接:两个坐标系对齐,元件自由度被完全消除。
连接后,元件与组件成为一个主体,相互之间不再有自由度。
如果将一个子组件与组件用焊接连接,子组件各零件将参照组件坐标系发按其原有自由度的作用。
总自由度为0。
槽:是两个主体之间的一个点----曲线连接。
从动件上的一个点,始终在主动件上的一根曲线(3D)上运动。
槽连接只使两个主体按所指定的要求运动,不检查两个主体之间是否干涉,点和曲线甚至可以是零件实体以外的基准点和基准曲线,当然也可以在实体部。
机构连接类型:约束连接:常规:也就是自定义组合约束,可根据需要指定一个或多个基本约束来形成一个新的组合约束,其自由度的多少因所用的基本约束种类及数量不同而不同。
可用的基本约束有:匹配、对齐、插入、坐标系、线上点、曲面上的点、曲面上的边,共7种。
在定义的时候,可根据需要选择一种,也可先不选取类型,直接选取要使用的对象,此时在类型那里开始显示为“自动”,然后根据所选择的对象系统自动确定一个合适的基本约束类型。
常规—匹配/对齐:对齐)。
单一的“匹配/对齐”构成的自定义组合约束转换为约束连接后,变为只有一个“匹配/对齐”约束的不完整约束,再转换为机构约束后变为“平面”连接。
àß这两个约束用来确定两个平面的相对位置,可设定偏距值,也可反向。
定义完后,在不修改对象的情况下可更改类型(匹配常规—插入:选取对象为两个柱面。
单一的“插入”构成的自定义组合约束转换为约束连接后,变为只有一个“插入”约束的不完整约束,再转换为机构约束后变为“圆柱”连接。
常规—坐标系:选取对象为两个坐标系,与6DOF的坐标系约束不同,此坐标系将元件完全定位,消除了所有自由度。
单一的“坐标系”构成的自定义组合约束转换为约束连接后,变为只有一个“坐标系”约束的完整约束,再转换为机构约束后变为“焊接”连接。
常规—线上点:选取对象为一个点和一条直线或轴线。
与“轴承”等效。
单一的“线上点”构成的自定义组合约束转换为约束连接后,变为只有一个“线上点”约束的不完整约束,再转换为机构约束后变为“轴承”连接。
常规—曲面上的点:选取对象为一个平面和一个点。
单一的“曲面上的点”构成的自定义组合约束转换为约束连接后,变为只有一个“曲面上的点”约束的不完整约束,再转换为机构约束后仍为单一的“曲面上的点”构成的自定义组合约束。
常规—曲面上的边:选取对象为一个平面/柱面和一条直边。
单一的“曲面上的点”构成的自定义组合约束不能转换为约束连接。
自由度与冗余约束自由度(DOF)是描述或确定一个系统(主体)的运动或状态(如位置)所必需的独立参变量(或坐标数)。
一个不受任何约束的自由主体,在空间运动时,具有6个独立运动参数(自由度),即沿XYZ三个轴的独立移动和绕XYZ三个轴的独立转动,在平面运动时,则只具有3个独立运动参数(自由度),即沿XYZ三个轴的独立移动。
主体受到约束后,某些独立运动参数不再存在,相对应的,这些自由度也就被消除。
当6个自由度都被消除后,主体就被完全定位并且不可能再发生任何运动。
如使用销钉连接后,主体沿XYZ三个轴的平移运动被限制,这三个平移自由度被消除,主体只能绕指定轴(如X轴)旋转,不能绕另两个轴(YZ轴)旋转,绕这两个轴旋转的自由度被消除,结果只留下一个旋转自由度。
冗余约束指过多的约束。
在空间里,要完全约束住一个主体,需要将三个独立移动和三个独立转动分别约束住,如果把一个主体的这六个自由度都约束住了,再另加一个约束去限制它沿X轴的平移,这个约束就是冗余约束。
合理的冗余约束可用来分摊主体各部份受到的力,使主体受力均匀或减少磨擦、补偿误差,延长设备使用寿命。
冗余约束对主体的力状态产生影响,对主体的对运动没有影响。
因运动分析只分析主体的运动状况,不分析主体的力状态,在运动分析时,可不考虑冗余约束的作用,而在涉及力状态的分析里,必须要适当的处理好冗余约束,以得到正确的分析结果。