现代控制理论-第5章 线性控制系统的可控性和可观测性
- 格式:ppt
- 大小:188.50 KB
- 文档页数:16
第4章线性系统的能控性与能观测性本章主要介绍定性分析方法,即对决定系统运动行为和综合系统结构有重要意义的关键性质(如可控性、可观测性、稳定性等)进行定性研究。
系统的可控、可观测性是由卡尔曼于60年代首先提出的,事后被证明这是系统的两个基本结构属性。
本章首先给出可控性、可观测性的严格的数学定义,然后导出判别线性系统的可控性和可观测性的各种准则,这些判别准则无论在理论分析中还是在实际应用中都是很有用的。
1第章线性系统的能控性与能观测性4.1 能控性和能观测性的定义(4.1)线性连续系统的能控性判据44.2 (4.2)4.3 线性连续系统的能观测性判据(4.3)4.5 能控规范型和能观测规范型(4.8,4.9)4.4 对偶性(4.6)24.6 连续时间线性时不变系统的结构分解(4.10)4.1 能控性和能观测性的定义一.能控性与能观测性的物理概念系统的可控性是指系统内的所有状态是否可以由输入影响。
系统可观性,是指系统内的所有状态是否可以由输出反映。
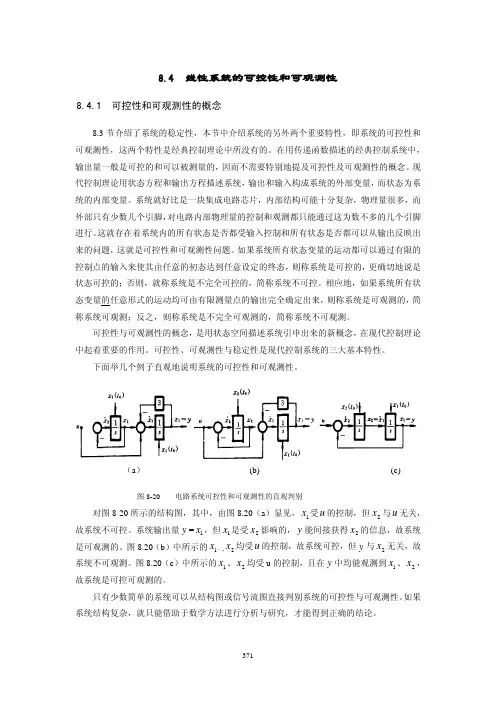
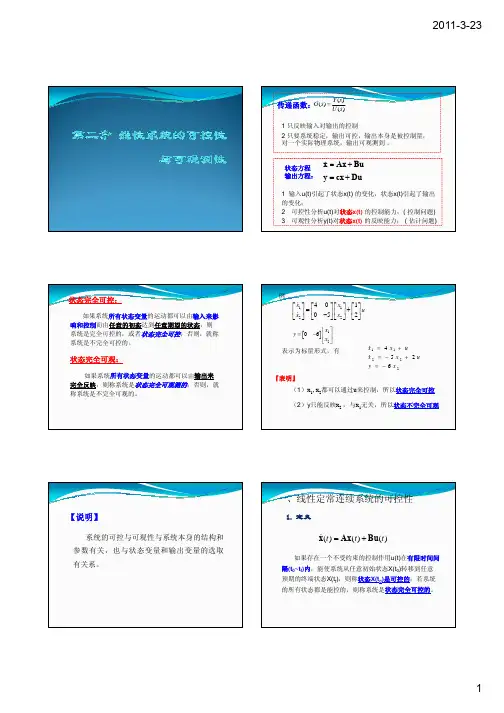
�能控性问题:已知某系统的当前时刻及其状态,是否存在一个容许控制使得系统在该控制的作用下于有,限时间后到达某希望的待定状态?�能观性问题:已知某系统及其在某时间段上的输出,可否依据这一时间段上的输出决定系统这一时间段上的状态?3例4-1:给定系统的状态空间描述为1122401052x x ux x ⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥−⎣⎦⎣⎦⎣⎦⎣⎦̇̇[]1206x y x ⎡⎤=−⎢⎥⎣⎦结构图表明:通过控制量u 可以控制状态x 1和x 2,所图4-1 系统结构图4以系统完全能控;但输出y 只能反映状态变量x 2,不能反映状态变量x 1,所以系统不完全能观测。
二.能控性定义1.状态可控考虑n 维线性时变系统的状态方程[]0001()()()=t t x A t x B t u x t x t T T t t =+=∈̇取定初始时刻,一个非零初始状态x (t 0) t T t ∈0=x 0,如果存在一个时刻和一个无约束的容许控制u (t ),,使状态由x (t 0)=x 0转移到x (t 1)=0,则称此x 0是在时刻t 0可011,t t T t t >∈01[,]t t t ∈5控的.x 0t 0x 初始状态31()0t =x 1t 无约束容许控制2x 01(),[,]t t t t ∈u 1x 000⇒在t 时刻可控系统在t 时刻可控x 6⇒所有时刻都可控系统一致可控.系统可控2考虑n 维线性时变系统的状态方程00()()()t x A t x B t u x t x t T =+=∈̇如果状态空间中的所有非零状态都是在t 0()时刻可控的,则称系统在时刻t 0是t T t ∈0完全可控的,简称系统在时刻t 0可控。
线性系统的可控性和可观性摘要:线性系统的可控性和可控性是线性系统最基本的概念。
本文从这个基本概念着手,介绍了线性系统的可控标准形和可观标准形,并且对系统可控性和可观性的判据做了详细的介绍。
本文的研究有利于对线性系统可控性和可观性的知识体系有一个比较好的了解,对进一步学习现代控制理论提供一个扎实的基础,同时通过对相关知识的归纳总结,为以后的学习研究提供了一个好的方法。
通过对其中大量高等数学的学习与应用,可以提高应用高等数学解决相关问题的意识与能力。
关键词:线性系统;可控性;可观性Linear system controllability and observabilityHou Shibo Liu Yingrui Wang linlin Lin HuanAbstact: Controllability of linear systems and control is the most basic concepts of linear systems. This paper started from this basic concept, introduced the form of linear system controllability and observability of the standard normal form, and the system controllability and observability criterion for a detailed description. This study is beneficial to the linear system controllability and observability of knowledge have a better understanding of the further study of modern control theory provides a solid foundation, through summarized the relevant knowledge for the future of learning Study provides a good method. Through which a large number of learning and application of advanced mathematics, applied mathematics can improve awareness of the problem solving and capacity-related.Key words: Linear system ;Controllable ;Observability0 引言在控制工程中,有两个问题经常引起设计者的关心。
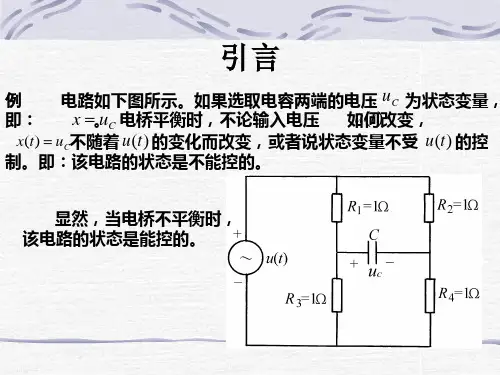
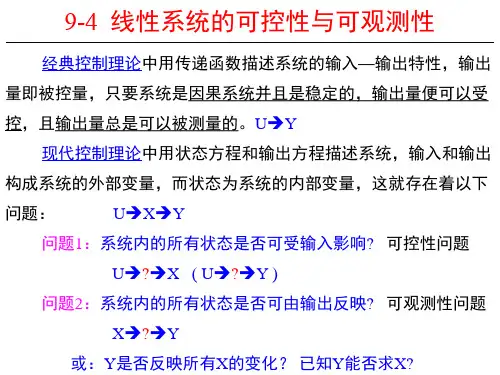
第四章 线性系统的可控性和可观性§4-1 问题的提出经典控制理论中用传递函数描述系统的输入—输出特性,输出量即被控量,只要系统是因果系统并且是稳定的,输出量便可以受控,且输出量总是可以被测量的,因而不需要提出可控性和可观性的概念. 现代控制理论是建立在用状态空间法描述系统的基础上的.状态方程描述输入)(t u 引起状态)(t x 的变化过程;输出方程描述由状态变化所引起的输出)(t y 的变化.可控性和可观性正是定性地分别描述输入)(t u 对状态)(t x 的控制能力,输出)(t y 对状态)(t x 的反映能力.它们分别回答: “输入能否控制状态的变化”——可控性“状态的变化能否由输出反映出来”——可观性可控性和可观性是卡尔曼(Kalman )在1960年首先提出来的.可控性和可观性的概念在现代控制理论中无论是理论上还是实践上都是非常重要的.例如:在最优控制问题中,其任务是寻找输入)(t u ,使状态达到预期的轨线.就定常系统而言,如果系统的状态不受控于输入)(t u ,当然就无法实现最优控制.另外,为了改善系统的品质,在工程上常用状态变量作为反馈信息.可是状态)(t x 的值通常是难以测取的,往往需要从测量到的)(t y 中估计出状态)(t x ;如果输出)(t y 不能完全反映系统的状态)(t x ,那么就无法实现对状态的估计.状态空间表达式是对系统的一种完全的描述.判别系统的可控性和可观性的主要依据就是状态空间表达式.【例如】(1)u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=202001 , []x y 01= 分析:上述动态方程写成方程组形式:⎪⎩⎪⎨⎧=+==1221122x y u x x x x 从状态方程来看,输入u 不能控制状态变量1x ,所以状态变量1x 是不可控的;从输出方程看,输出y 不能反映状态变量2x ,所以状态变量2x 是不能观测的.即状态变量1x 不可控、可观测;状态变量2x 可控、不可观测.(2)u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=112001 , []x y 11= 分析:上述动态方程写成方程组形式:⎪⎩⎪⎨⎧+=+=+=2122112x x y u x x u x x 由于状态变量1x 、2x 都受控于输入u ,所以系统是可控的;输出y 能反映状态变量1x ,又能反映状态变量2x 的变化,所以系统是可观测的.即状态变量1x 可控、可观测;状态变量2x 可控、可观测.(3)u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=111001 , []x y 11= 分析:上述动态方程写成方程组形式:⎪⎩⎪⎨⎧+=+=+=212211x x y u x xu x x 从状态方程看,输入u 能对状态变量1x 、2x 施加影响,似乎该系统的所有状态变量都是可控的;从输出方程看,输出y 能反映状态变量1x ,2x 的变化,似乎系统是可观测的.实际上,这个系统的两个状态变量既不是完全可控的,也不是完全可观测的.要解释和说明这一情况,就必须首先弄清楚可控性和可观性的严格定义及判别方法.§4-2 线性定常连续系统的可控性一、线性定常连续系统状态可控性的定义定义4.1(状态可控性定义):对于线性定常系统Bu Ax x+= ,如果存在一个分段连续的输入)(t u ,能在],[0f t t 有限时间间隔内,使得系统从某一初始状态)(0t x 转移到指定的任一终端状态)(f t x ,则称此状态是可控的.若系统的所有状态都是可控的,则称此系统是状态完全可控的,简称系统是可控的.关于可控性定义的说明:(1)上述定义可以在二阶系统的相平面上来说明.假如相平面中的P 点能在输入的作用下转移到任一指定状态n P P P ,,,21 ,那么相平面上的P 点是可控状态.假如可控状态“充满”整个状态空间,即对于任意初始状态都能找到相应的控制输入)(t u ,使得在有限时间间隔内,将此状态转移到状态空间中的任一指定状态,则该系统称为状态完全可控.(2)在可控性定义中,把系统的初始状态取为状态空间中的任意有限点)(0t x ,而终端状态也规定为状态空间中的任意点)(f t x ,这种定义方式不便于写成解析形式.为了便于数学处理,而又不失一般性,我们把上面的可控性定义分两种情况叙述:①把系统的初始状态规定为状态空间中的任意非零点,而终端目标规定为状态空间中的原点.于是原可控性定义可表述为:对于给定的线性定常系统Bu Ax x+= ,如果存在一个分段连续的输入)(t u ,能在],[0f t t 有限时间间隔内,将系统由任意非零初始状态)(0t x 转移到零状态)(f t x ,则称此系统是状态完全可控的,简称系统是可控的.②把系统的初始状态规定为状态空间的原点,即0)(0=t x ,终端状态规定为任意非零有限点,则可达定义表述如下:对于给定的线性定常系统Bu Ax x+= ,如果存在一个分段连续的输入)(t u ,能在],[0f t t 有限时间间隔内,将系统由零初始状态)(0t x 转移到任一指定的非零终端状态)(f t x ,则称此系统是状态完全可达的,简称系统是可达的(能达的).铙誅卧泻噦圣骋贶頂廡。