ProE齿轮参数化建模画法作者:lm2000i (一) 参数定义
(二)在Top面上做从小到大的4个圆(圆心点位于默认坐标系原点),直径为任意值。生成后修改各圆直径尺寸名为(从小到大)Df、DB、D、Da,加入关系: Alpha_t=atan(tan(Alpha_n)/cos(Beta)) Ha=(Ha_n+X_n)*M_n Hf=(Ha_n+C_n-X_n)*M_n
D=Z*M_n/cos(Beta) Db=D*cos(Alpha_t) Da=D+2*Ha Df=D-2*Hf 注:当然这里也可不改名,而在关系式中采用系统默认标注名称(如d1、d2...),将关系式中的“Df、DB、D、Da”用“d1、d2…”代替。改名的方法为:退出草绘----点选草图----编缉----点选标注----右键属性----尺寸文本----名称栏填新名称 (三)以默认坐标系为参考,偏移类型为“圆柱”,建立用户坐标系原点CS0。此步的目的在于后面优化(步5)时,能够旋转步4所做的渐开线齿形,使DTM2能与FRONT重合。
选坐标系CS0,用笛卡尔坐标,作齿形线(渐开线):Rb=Db/2 theta=t*45 x= Rb*cos(theta)+ Rb*sin(theta)*theta*pi/180 y=0 z= Rb*sin(theta)- Rb*cos(theta)*theta*pi/180
注:笛卡尔坐标系渐开线方式程式为 其中:theta为渐开线在K点的滚动角。因此,上面关系式theta=t*45中的45是可以改的,其实就是控制上图中AB的弧长。 (四)过Front/Right,作基准轴A_1;以渐开线与分度圆交点,作基准点PNT0;过轴A_1与PNT0做基准面DTM1。
3.3锥齿轮的创建 锥齿轮在机械工业中有着广泛的应用,它用来实现两相交轴之间的传动,两轴的相交角一般采用90度。锥齿轮的轮齿排列在截圆锥体上,轮齿由齿轮的大端到小端逐渐收缩变小,本节将介绍参数化设计锥齿轮的过程。 3.3.1锥齿轮的建模分析 与本章先前介绍的齿轮的建模过程相比较,锥齿轮的建模更为复杂。参数化设计锥齿轮的过程中应用了大量的参数与关系式。 锥齿轮建模分析(如图3-122所示): (1)输入关系式、绘制创建锥齿轮所需的基本曲线 (2)创建渐开线 (3)创建齿根圆锥 (4)创建第一个轮齿 (5)阵列轮齿 图3-122锥齿轮建模分析 3.3.2锥齿轮的建模过程 1.输入基本参数和关系式
(1)单击,在新建对话框中输入文件名conic_gear,然后单击; (2)在主菜单上单击“工具”→“参数”,系统弹出“参数”对话框,如图3-123所示; 图3-123 “参数”对话框 (3)在“参数”对话框单击按钮,可以看到“参数”对话框增加了一行,依次输入新参数的名称、值、和说明等。需要输入的参数如表3-3所示; 名称值说明名称值说明 M 2.5 模数DELTA ___ 分锥角 Z 24 齿数DELTA_A ___ 顶锥角 Z_D 45 大齿轮齿数DELTA_B ___ 基锥角 ALPHA 20 压力角DELTA_F ___ 根锥角 B 20 齿宽HB ___ 齿基高 HAX 1 齿顶高系数RX ___ 锥距 CX 0.25 顶隙系数THETA_A ___ 齿顶角 HA ___ 齿顶高THETA_B ___ 齿基角 HF ___ 齿根高THETA_F ___ 齿根角 H ___ 全齿高BA ___ 齿顶宽 D ___ 分度圆直径BB ___ 齿基宽 DB ___ 基圆直径BF ___ 齿根宽 DA ___ 齿顶圆直径X 0 变位系数
1, 齿数 z 一个齿轮的轮齿总数。 2, 模数 m 齿距与齿数的乘积等于分度圆的周长,即pz=πd, 式中 z 是自然数, π是无理数。为使 d 为有理数的条件是p/π为有理数,称之为模数。即:m=p/π 3, 分度圆直径 d 齿轮的轮齿尺寸均以此圆为基准而加以确定, d=mz 4,齿顶圆直径 da 和齿根圆直径 df 由齿顶高、齿根高计算公式可以推出齿顶圆直径和齿根圆直径的计算公式: da=d+2ha df=d-2hf =mz+2m=mz-2×1.25m =m(z+2=m(z-2.5 5, 模数 z:齿轮的分度圆是设计、计算齿轮各部分尺寸的基准 , 而齿轮分度圆的周长=πd=z p,于是得分度圆的直径 d=z p/π 由于在上式中π为一无理数 , 不便于作为基准的分度圆的定位 . 为了便于计算 , 制造和检验 , 现将比值p/π人为地规定为一些简单的数值 , 并把这个比值叫做模数(module,以 m 表示 , 即令 其单位为 mm. 于是得 :
模数 m 是决定齿轮尺寸的一个基本参数 . 齿数相同的齿轮模数大 , 则其尺寸也大 . 为了便于制造 , 检验和互换使用 , 齿轮的模数值已经标准化了 . 6,分度圆直径 d :在齿轮计算中必须规定一个圆作为尺寸计算的基准圆,定义:直径为模数乘以齿数的乘积的圆。实际在齿轮中并不存在, 只是一个定义上的圆。其直径和半径分别用 d 和 r 表示,值只和模数和齿数的乘积有关,模数为端面模数。与变位系数无关。标准齿轮中为槽宽和齿厚相等的那个圆 (不考虑齿侧间隙就为分度圆。标准齿轮传动中和节圆重合。但若是变位齿轮中, 分度圆上齿槽和齿厚将不再相等。若为变位齿轮传动中高变位齿轮传动分度圆仍和节圆重合。但角变位的齿轮传动将分度圆和节圆分离。 7,压力角α——在两齿轮节圆相切点 P 处,两齿廓曲线的公法线(即齿廓的受力方向与两节圆的公切线(即 P 点处的瞬时运动方向所夹的锐角称为压力角,也称啮合角。对单个齿轮即为齿形角。标准齿轮的压力角一般为20” 。 小压力角齿轮的承载能力较小; 而大压力角齿轮, 虽然承载能力较高, 但在传递转矩相同的情况下轴承的负荷增大,因此仅用于特殊情况。
1、齿数z 一个齿轮的轮齿总数。 2、模数m 齿距与齿数的乘积等于分度圆的周长,即pz=πd,式中z是自然数,π是无理数。为使d为有理数的条件是p/π为有理数,称之为模数。即:m=p/π 3、分度圆直径d 齿轮的轮齿尺寸均以此圆为基准而加以确定,d=mz 4、齿顶圆直径d a和齿根圆直径d f 由齿顶高、齿根高计算公式可以推出齿顶圆直径和齿根圆直径的计算公式: d a=d+2h a d f=d-2h f =mz+2m=mz-2×1.25m =m(z+2)=m(z-2.5) 1、模数z:齿轮的分度圆是设计、计算齿轮各部分尺寸的基准,而齿轮分度圆的周长=πd=z p,于是得分度圆的直径 d=z p/π 由于在上式中π为一无理数,不便于作为基准的分度圆的定位.为了便于计算,制造和检验,现将比值p/π人为地规定为一些简单的数值,并把这个比值叫做模数(module),以m表示,即令 其单位为mm.于是得: 模数m是决定齿轮尺寸的一个基本参数.齿数相同的齿轮模数大,则其尺寸也大.为了便于制造,检验和互换使用,齿轮的模数值已经标准化了. 2、分度圆直径d:在齿轮计算中必须规定一个圆作为尺寸计算的基准圆,定义:直径为模数乘以齿数的乘积的圆。实际在齿轮中并不存在,只是一个定义上的圆。其直径和半径分别用d和r表示,值只和模数和齿数的乘积有关,模数为端面模数。与变位系数无关。标准齿轮中为槽宽和齿厚相等的那个圆(不考虑齿侧间隙)就为分度圆。标准齿轮传动中和节圆重合。但若是变位齿轮中,分度圆上齿槽和齿厚将不再相等。若为变位齿轮传动中高变位齿轮传动分度圆仍和节圆重合。但角变位的齿轮传动将分度圆和节圆分离。 3、压力角α——在两齿轮节圆相切点P处,两齿廓曲线的公法线(即齿廓的受力方向)与两节圆的公切线(即P点处的瞬时运动方向)所夹的锐角称为压力角,也称啮合角。对单个齿轮即为齿形角。标准齿轮的压力角一般为20”。 小压力角齿轮的承载能力较小;而大压力角齿轮,虽然承载能力较高,但在传递转矩相同的情况下轴承的负荷增大,因此仅用于特殊情况。 4、齿廓基本参数与表达:
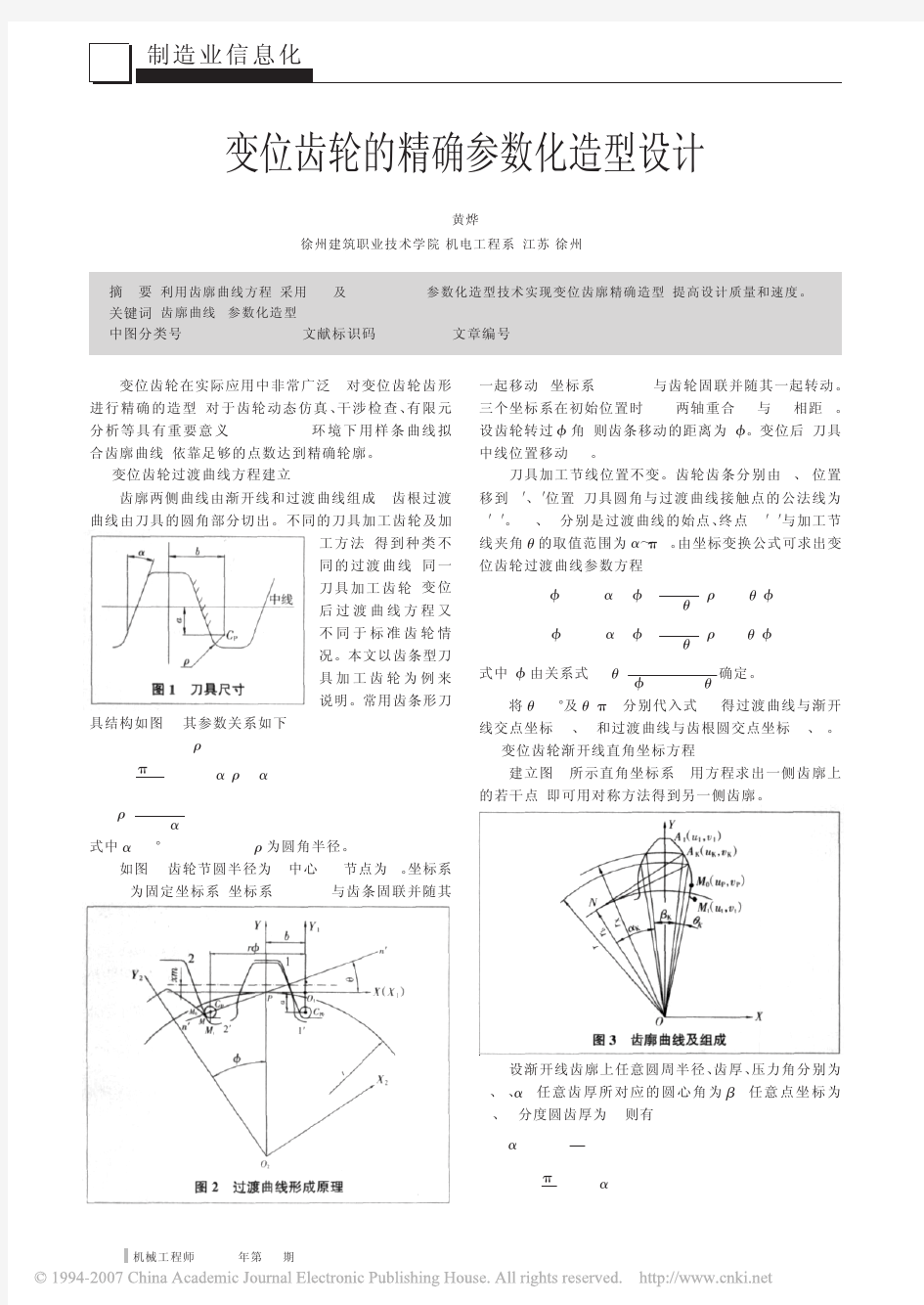
齿轮传动是最重要的机械传动之一。齿轮零件具有传动效率高、传动比稳定、结构紧凑等优点。因而齿轮零件应用广泛,同时齿轮零件的结构形式也多种多样。根据齿廓的发生线不同,齿轮可以分为渐开线齿轮和圆弧齿轮。根据齿轮的结构形式的不同,齿轮又可以分为直齿轮、斜齿轮和锥齿轮等。本章将详细介绍用Pro/E创建标准直齿轮、斜齿轮、圆锥齿轮、圆弧齿轮以及蜗轮蜗杆的设计过程。 3.1直齿轮的创建 3.1.1渐开线的几何分析 Xbyl 通逍心刃果确定 χ≠y 图3-1 渐开线的几何分析 渐开线是由一条线段绕齿轮基圆旋转形成的曲线。渐开线的几何分析如图3-1所示。线段S绕圆弧旋转,其一端点A划过的一条轨迹即为渐开线。图中点(x1,y1 )的坐标为:X仁r*cos(a ng),y仁r*s in (a ng) 。(其中r 为圆半径,ang 为图示角度)
对于Pro/E关系式,系统存在一个变量t, t的变化范围是0?1。从而可以通过( X1,y1 )建立( X,y )的坐标,即为渐开线的方程。 ang=t*90 s=(PI*r*t)/2 X1=r*cos(ang) y1=r*sin(ang) X=X1+(s*sin(ang)) y=y1-(s*cos(ang)) z=0 以上为定义在Xy 平面上的渐开线方程,可通过修改X,y,z 的坐标关系来定义在其它面上的方程,在此不再重复。 3.1.2 直齿轮的建模分析 本小节将介绍参数化创建直齿圆柱齿轮的方法,参数化创建齿轮的过程相对复杂,其中要用到许多与齿轮有关的参数以及关系式。 直齿轮的建模分析(如图3-2 所示): (1)创建齿轮的基本圆 这一步用草绘曲线的方法,创建齿轮的基本圆,包括齿顶圆、基圆、分度圆、齿根圆。并且用事先设置好的参数来控制圆的大小。 (2)创建渐开线
渐开线直齿圆柱齿轮参数的测定与分析 一、 实验目的 1.掌握测量渐开线直齿圆柱变位齿轮参数的方法。 2.通过测量和计算,进一步掌握有关齿轮各几何参数之间的相互关系和渐开线性质。 二、实验内容 对渐开线直齿园柱齿轮进行测量,确定其基本参数(模数m 和压力角α)并判别它是否为标准齿轮,对非标准齿轮,求出其变位系统X 。 三、实验设备和工具 1.待测齿轮分别为标准齿轮、正变位齿轮、负变位齿轮,齿数各为奇数、偶数。 2.游标卡尺,公法线千分尺。 3.渐开线函数表(自备)。 4.计算器(自备)。 四、实验原理及步骤 渐开线直齿圆柱齿轮的基本参数有:齿数Z 、模数m 、分度圆压力角α齿顶高系数h *a 、顶隙系数C *、中心距α和变位系数x 等。本实验是用游标卡尺和公法千分尺测量,并通过计算来确定齿轮的基本参数。 1.确定齿数Z 齿数Z 从被测齿轮上直接数出。 2.确定模数m 和分度圆压力角α 在图4-1中,由渐开线性质可知,齿廓间的公法线长度AB 与所对应的基圆弧长00ΒΑ相等。根据这一性质,用公法线千分尺跨过n 个齿,测得齿廓间公法线长度为W n ′,然后再跨过n +1个齿测得其长度为1+'n W 。 b b n b b n S nP W S P n W +='+-='+1,)1( n n b W W P '-'=+1 式中,P b 为基圆齿距,απcos b m P = (mm),与齿轮变位与否无关。 b S 为实测基圆齿厚,与变位量有关。由此可见,测定公法线长度n W '和1+'n W 后就可求出基
圆齿距P b ,实测基圆齿厚S b ,进而可确定出齿轮的压力角α、模数m 和变位系数x 。因此,齿轮基本参数测定中的关键环节是准确测定公法线长度。 图4-1 公法线长度测量 (1)测定公法线长度n W '和1+'n W 根据被齿轮的齿数Z ,按下式计算跨齿数: 5.0180+??=Z a n 式中:α —压力角;z —被测齿轮的齿数 我国采用模数制齿轮,其分度圆标准压力角是20°和15°。若压力角为20°可直接参照下表确定跨齿数n 。 公法线长度测量按图4—1所示方法进行,首先测出跨n 个齿时的公法线长度n W '。测定时应注意使千分尺的卡脚与齿廓工作段中部(齿轮两个渐开线齿面分度圆)附近相切。为减少测量误差,n W '值应在齿轮一周的三个均分位置各测量一次,取其平均值。
圓柱齒輪(CYLINDER GEAR)的參數名稱 M=齿轮的模数; Z=齿轮的齿数 ALPHA=齿轮的压力角度 B=齿轮的宽度 HAX=齿轮的齿顶高系数 CX=齿轮的齿底隙系数 X=齿轮的变位系数 圓錐齒輪(CONIC STRAIGHT GEAR)的參數名稱 M=齿轮的模数; Z=齿轮的齿数 Z-ASM=与之啮合齿轮的齿数 ALPHA=齿轮的压力角度 B=齿轮的宽度 HAX=齿轮的齿顶高系数 CX=齿轮的齿底隙系数 X=齿轮的变位系数 人字形齒輪(HERRING GEAR)的參數名稱 MN=齿轮的法向模数; Z=齿轮的齿数 ALPHA=齿轮的压力角度 BETA=齿轮的螺旋角 B=齿轮的宽度 HAX=齿轮的齿顶高系数 CX=齿轮的齿底隙系数 X=齿轮的变位系数 左旋內齒輪(HELICAL INNER LEFT GEAR)的參數名稱 MN=齿轮的法向模数; Z=齿轮的齿数 ALPHA=齿轮的压力角度 BETA=齿轮的螺旋角 B=齿轮的宽度 HAX=齿轮的齿顶高系数 CX=齿轮的齿底隙系数
X=齿轮的变位系数 右旋齒輪(HELICAL RIGHT GEAR )的參數名稱 MN=齿轮的法向模数; Z=齿轮的齿数 ALPHA=齿轮的压力角度 BETA=齿轮的螺旋角 B=齿轮的宽度 HAX=齿轮的齿顶高系数 CX=齿轮的齿底隙系数 X=齿轮的变位系数 左旋蝸杆(WORM CYLINDER LEFT)的參數名稱 Q=蜗杆的特性系数 M=蜗杆的模数; Z1=蜗杆的頭數; Z2=蜗杆的齒數; ALPHA=齿轮的压力角度 L=齿轮的螺旋角 左旋蝸輪(WORM GEAR CYLINDER LEFT)的參數名稱 Q=蜗杆的特性系数 M=蜗杆的模数; Z2=蜗杆的齒數; Z1=蜗杆的頭數; ALPHA=齿轮的压力角度 B=蜗轮的宽度 X2=齿轮的变位系数 內圓柱齒輪(CYLINDER INNER GEAR)的參數名稱 M=齿轮的模数; Z=齿轮的齿数 ALPHA=齿轮的压力角度 B=齿轮的宽度 HAX=齿轮的齿顶高系数 CX=齿轮的齿底隙系数 X=齿轮的变位系数
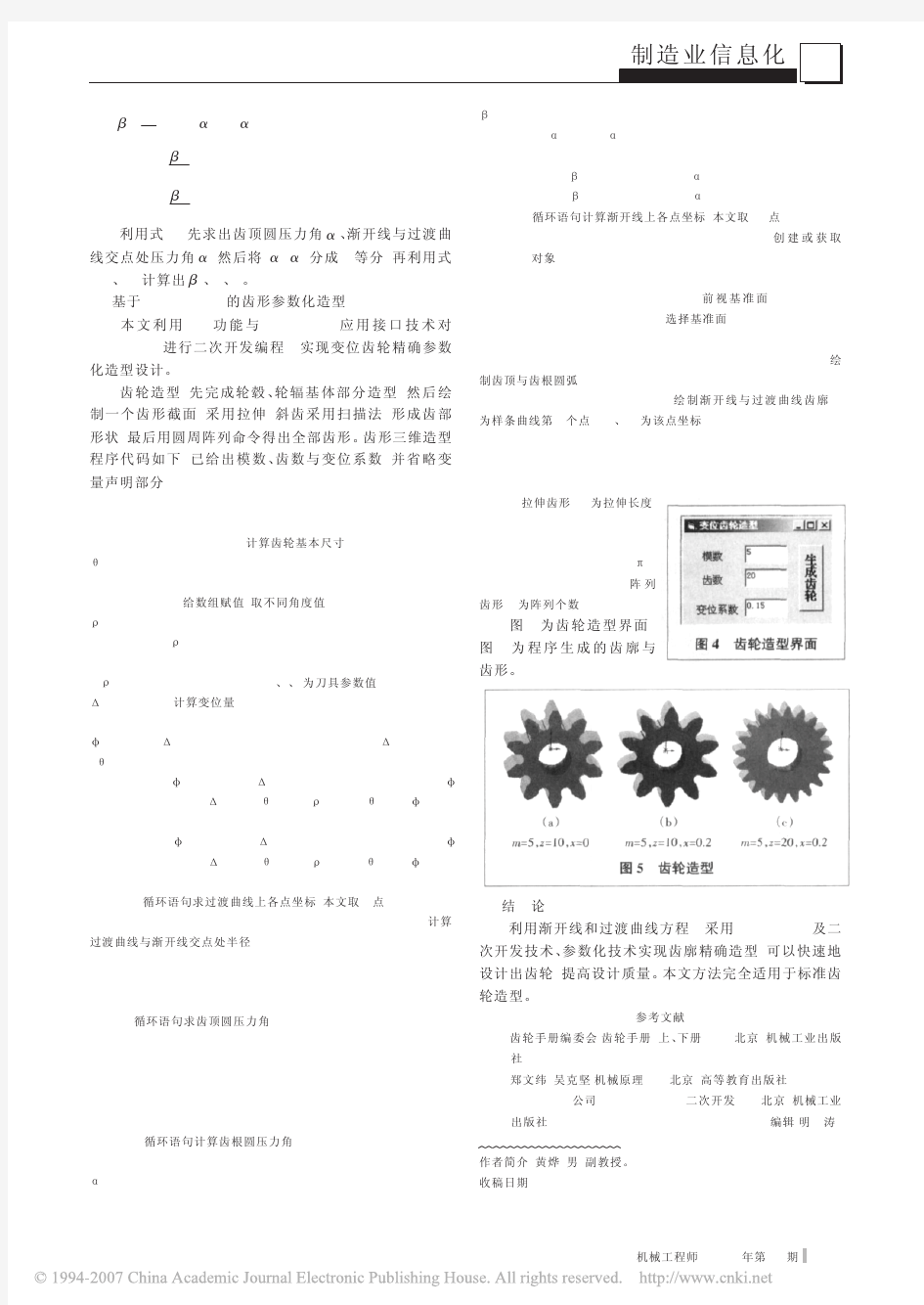
3.1 直齿轮的参数化建模 3.1.1 零件分析 直齿轮外形如图3-1所示,由轮齿、键槽、轴孔等基本结构特征组成。 直齿轮建模的具体操作步骤如下: (1)添加直齿轮设计参数。 (2)添加齿轮关系式。 (3)创建渐开线方程。 (4)创建齿廓型面特征。 (5)创建阵列特征。 3.1.2 创建直齿轮 (1)新建文件。 启动PROE Wildfire3.0,单击工具栏 (新 建)工具,或单击菜单“文件”→“新建”。出现如图3-2所示对话框。选择系统默认“零件”,子类型“实体”方式,“名称”栏中输入zhichilun ,同时注意不勾选“使用缺省模板”。 图3-1 直齿轮参数化模型 键槽 轮齿 安装孔
选择公制模板mmns-part-solid ,如图3-3所示,然后单击“确定”。 (2)创建齿轮设计参数。 选择菜单栏“工具”→“参数”命令,出现如图3-4所示对话框。单击 (添加)按 钮,依次添加齿轮设计参数及初始值,m(模数)值2.75,alpha (压力角)值20度,df (齿根圆直径),da (齿顶圆直径),db (基圆直径),d (分度圆直径),b (齿宽)值24mm ,z (齿数)值10个。添加完毕单击“确定”。 (3)添加齿轮参考圆关系式。 1)选择“插入”→“模型基准”→“草绘”特征工具,或单击工具栏(草绘)命令,出现如图3-5所示对话框。选择FRONT 基准平面为草绘平面,系统自动捕捉到与其垂直的RIGHT 基准平面为其参考平面。单击“草绘”确认,进入二维草绘模式如图3-6所示。 图3-5 “新建”对话框 3-6 尺寸参照设置 3-7 参考圆创建 图3-4 参数对话框 参数收集删除按钮 添加按钮 垂直参考 水平参考
齿轮机构及其设计>变位齿轮 变位齿轮的意义 (1)避免根切现象.切削z<z min的齿轮而不发生根切; (2)配凑中心距.一对齿轮在非标准中心距的情况下不仅均能安装,而且能满足侧隙为零、顶隙为标准值的要求; (3)改善小齿轮的强度和传动啮合特性,能提高齿轮机构的承载能力。 (4)修复已磨损的旧齿轮 变位修正 用标准齿条形刀具加工齿轮时,改变刀具与轮坯的相对位置,使刀具的分度线与齿轮轮坯的分度圆不再相切而切制出的齿轮为变位修正齿轮,简称变位齿轮。按刀具分度线与被加工齿轮分度圆的相对位置,可分为三种情况: (1)使刀具的分度线(中线)刚 好与轮坯的分度圆相切而范成 切制出来的齿轮为标准齿轮(或 非变位齿轮)。
(2)刀具的分度线(中线)与被加工齿轮分度圆相切位置远离轮坯中心一段径向距离xm(m为模数,x为径向变位系数,简称变位系数)。这样加工出来的齿轮成为正变位齿轮。xm> 0,x>0。 (3)刀具的分度线靠近轮坯中心移动一段径向距离xm,刀具分度线与轮坯分度圆相割。这样加工出来的齿轮称为负变位齿轮。xm<0,x<0。 变位齿轮的基本参数和几何尺寸基本参数:比标准齿轮多了一个变位系数x 几何尺寸(与相同参数的标准齿轮的尺寸比较):
正变位负变位 分度圆 不变不变 直径 基圆直 不变不变 径 齿顶圆 变大变小 直径 齿根圆 变大变小 直径 分度圆 不变不变 齿距 分度圆 变大变小 齿厚 分度圆 变小变大 齿槽宽 顶圆齿 变小变大 厚 根圆齿 变大变小 厚 无侧隙啮合方程 变位齿轮传动的中心距与啮合角 符合无侧隙啮合要求的变位齿轮传动的中心距a'是这样确定的: (1)首先由无侧隙啮合方程求得啮合角α': (2)再由求得中心距a' 此中心距a'与标准中心距a之间的差值用ym表示(y称为中心距变动系数): 则
运行环境:CATIA P3 V5 R20 一齿轮参数与公式表格 表1 序号参 数 类型或单 位 公式描述 1 a 角度 (deg) 标准值:20deg 压力角: (10deg≤a≤20deg) 2 m 长度(mm) ——模数 3 z 整数——齿数(5≤z≤200) 4 p 长度(mm) m * π齿距 5 ha 长度(mm) m 齿顶高=齿顶到分度圆的高度 6 hf 长度(mm) if m > 1.25 ,hf = m * 1.25; else hf = m * 1.4 齿根高=齿根到分度圆的深度 7 rp 长度(mm) m * z / 2 分度圆半径 8 ra 长度(mm) rp + ha 齿顶圆半径 9 rf 长度(mm) rp - hf 齿根圆半径 10 rb 长度(mm) rp * cos( a ) 基圆半径 11 rr 长度(mm) m * 0.38 齿根圆角半径 12 t 实数0≤t≤1渐开线变量 13 x 长度(mm) rb * ( cos(t * π) +sin(t * π) * t * π ) 基于变量t的齿廓渐开线X 坐标 14 y 长度(mm) rb * ( sin(t * π) -cos(t * π) * t *π ) 基于变量t的齿廓渐开线X 坐标 15 b 角度——斜齿轮的分度圆螺旋角
(deg) 16 l 长度(mm) ——齿轮的厚度 (在定义计算参数中舔加公式时,可以直接复制公式:注意单位一致)图1 二、参数与公式的设置 1、点击 中的工具,选择“选项”,出现如下界面,操作如图
选上蓝色圈内的选项,然后 同样选上蓝色圈内的选项 3、新建零件图 1、点击“文件”——“新建”——“part”——命名为“参数齿轮” 2、点击“开始”——“形状”——“创成式外形设计”——“参数齿轮”
齿轮各参数计算方法 1、齿数Z 闭式齿轮传动一般转速较高,为了提高传动的平稳性,减小冲击振动,以齿数多一些为好,小一些为好,小齿轮的齿数可取为z1=20~40。开式(半开式)齿轮传动,由于轮齿主要为磨损失效,为使齿轮不致过小,故小齿轮不亦选用过多的齿数,一般可取z1=17~20。为使齿轮免于根切,对于α=20度的标准支持圆柱齿轮,应取z1≥17 2、模数m 齿距与齿数的乘积等于分度圆的周长,即pz=πd。为使d为有理数的条件是 p/π为有理数,称之为模数。即:m=p/π 模数m是决定齿轮尺寸的一个基本参数。齿数相同的齿轮模数大,则其尺寸也大。
3、分度圆直径d 齿轮的轮齿尺寸均以此圆为基准而加以确定,d=mz 4、齿顶圆直径da和齿根圆直径df 由齿顶高、齿根高计算公式可以推出齿顶圆直径和齿根圆直径的计算公式: da=d+2ha df=d-2hf =mz+2m=mz-2×1.25m =m(z+2)=m(z-2.5) 5、分度圆直径d 在齿轮计算中必须规定一个圆作为尺寸计算的基准圆,定义:直径为模数乘以齿数的乘积的圆。实际在齿轮中并不存在,只是一个定义上的圆。其直径和半径分别用d和r表示,值只和模数和齿数的乘积有关,模数为端面模数。与变位系数无关。标准齿轮中为槽宽和齿厚相等的那个圆(不考虑齿侧间隙)就为分度圆。标准齿轮传动中和节圆重合。但若是变位齿轮中,分度圆上齿槽和齿厚将不再相等。若为变位齿轮传动中高变位齿轮传动分度圆仍和节圆重合。但角变位的齿轮传动将分度圆和节圆分离。 6、压力角αrb=rcosα=1/2mzcosα 在两齿轮节圆相切点P处,两齿廓曲线的公法线(即齿廓的受力方向)与两节圆的公切线(即P点处的瞬时运动方向)所夹的锐角称为压力角,也称啮合角。对单个齿轮即为齿形角。标准齿轮的压力角一般为20”。在某些场合也有采用α=14.5°、15°、22.50°及25°等情况。
proe参数化建模简介(1) 本教程分两部分,第一部分主要介绍参数化建模的相关概念和方法,包括参数的概念、参数的设置、关系的概念、关系的类型、如何添加关系以及如何使用关系创建简单的参数化零件(以齿轮为例)。 第二部分介绍参数化建模的其他方法:如族表的应用、如何使用UDF(用户自定义特征)、如何使用Pro/Program创建参数化零件。(后一部分要等一段时间了,呵呵)参数化设计是proe重点强调的设计理念。参数是参数化设计的核心概念,在一个模型中,参数是通过“尺寸”的形式来体现的。参数化设计的突出有点在于可以通过变更参数的方法来方便的修改设计意图,从而修改设计意图。关系式是参数化设计中的另外一项重要内容,它体现了参数之间相互制约的“父子”关系。 所以,首先要了解proe中参数和关系的相关理论。 一、什么是参数? 参数有两个含义: ●一是提供设计对象的附加信息,是参数化设计的重要要素之一。参数和模型一起存储,参数可以标明不同模型的属性。例如在一个“族表”中创建参数“成本”后,对于该族表的不同实例可以设置不同的值,以示区别。 ●二是配合关系的使用来创建参数化模型,通过变更参数的数值来变更模型的形状和大小。 二、如何设置参数 在零件模式下,单击菜单“工具”——参数,即可打开参数对话框,使用该对话框可添加或编辑一些参数。
1.参数的组成 (1)名称:参数的名称和标识,用于区分不同的参数,是引用参数的依据。注意:用于关系的参数必须以字母开头,不区分大小写,参数名不能包含如下非法字符:!、”、@和#等。 (2)类型:指定参数的类型 ?a)整数:整型数据 ?b)实数:实数型数据 ?c)字符型:字符型数据 ?d)是否:布尔型数据。 (3)数值:为参数设置一个初始值,该值可以在随后的设计中修改 (4)指定:选中该复选框可以使参数在PDM(Product Data Management,产品数据管理)系统中可见 (5)访问:为参数设置访问权限。
变位齿轮的计算方法 1 变位齿轮的功用及变位系数 变位齿轮具有以下功用: (1)避免根切; (2)提高齿面的接触强度和弯曲强度; (3)提高齿面的抗胶合和耐磨损能力; (4)修复旧齿轮; (5)配凑中心距。 对于齿数z=8~20的直齿圆柱齿轮,当顶圆直径d a=mz+2m+2xm时,不产生根切的最小变位系数x min,以及齿顶厚S a=0.4m和S a=0时的变位系数x sa=0.4m和x sa=0如表1所列。 2 变位齿轮的简易计算 将变位齿轮无侧隙啮合方程式作如下变换: 总变位系数 中心距变动系数 齿顶高变动系数 表 1 齿数z=8~20圆柱齿轮的变位系数 或 Δy=xΣ-y 式中:α——压力角,α=20°; α′——啮合角; z2、z1——大、小齿轮的齿数。
将上述三式分别除以,则得: 由上述公式可以看出,当齿形角α一定时,x z、y z和Δy z均只为啮合角α′的函数。在设计计算时,只要已知x z、y z、Δy z和α′四个参数中的任一参数,即可由变位齿轮的x z、y z、Δy z和啮合角α′的数值表(表2)中,查出其他三个参数,再进行下列计算。一般齿轮手册上均列有此数值表。 式中正号用于外啮合,负号用于内啮合。 3 计算实例 例1: 已知一对外啮合变位直齿轮,齿数z1=18,z2=32,压力角α=20°,啮合角α′=22°18′,试确定总变位系数xΣ、中心距变动系数y及齿顶高变动系数Δy。 解: 根据α′=22°18′查表2,得: x z=0.01653,y z=0.01565,Δy z=0.00088 由此得: 例2: 已知一直齿内啮合变位齿轮副,齿数z1=19,z2=64,α=20°,啮合角α′=21°18′。求xΣ、y及Δy。 解: 根据α′=21°18′查表2,得: x z=0.00886,y z=0.00859,Δy z=0.00027。
二、参数化圆柱齿轮的建立 1.新建并命名零件的名称为yuanzhuchilun.prt 。 2.创建用户参数:齿轮模数-M,齿轮齿数-Z,齿轮厚度-B ,齿轮压力角-ANGLE 。 在主菜单选择“工具”→“参数”命令,打开如图2-1所示的“参数”对话框然后单击四次 按钮,在名称栏中依次输入参数名m 、z 、b 、angle ,类型栏中全部为实数,参数值分别为4、20、20、20. 3.创建基准曲线:在特征工具栏单击草绘按钮,选取front 基准面为草绘平面,绘制草图,如图2-2所示(直径值可以任意给出,以后将由关系式控制),在特征工具栏单击完成 按钮退出草绘。 4.在零件模型中创建关系: 在主菜单选择“工具”→“关系”命令,打开如图2-3所示的“关系”对话框,然后选择上一步所绘制的基准曲线,此时系统显示出此基准曲线的所有尺寸参数符号,如图2-4所示:在“关系”对话框的关系编辑区,键入如下关系式: d0=m*z-m*2.5 d1=d2*cos (angle ) d2=m*z d3=m*z+m*2 说明:在以上关系中,d2代表分度圆直径,d0代表齿根圆直径,d1代表基圆直径,d3代表齿顶圆直径。 单击对话框中的确定按钮,完成关系定义,然后单击工具栏中的“再生” 按钮,再生模型。 5.创建渐开线: 在特征工具栏单击“曲线”按钮,在弹出的如图2-5所示的“菜单管理器”中,选择 图2-1“参数”对话框 图2-2 截面草图
“从方程”→“完成”命令,此时系统弹出如图2-6所示的信息框,选取默认坐标系PRT_CSYS_DEF ,并在弹出的如图2-7所示的“菜单管理器”中选择笛卡尔命令,系统弹出如图2-8所示的记事本,在文本输入区,输入如下所示的渐开线方程: r=d1/2 theta=t*90 x=r*cos(theta)+r*sin(theta)* theta*(pi/180) y=r*sin(theta)-r*cos(theta)* theta*(pi/180) z=0 完成后将其保存然后退出记事本,单击“曲线 从方 程”信息框中的确定按钮,完成渐开线的建立,如图2-9 所示。 6.拉伸曲面:在特征工具栏单击拉伸按钮, 在拉伸面板中按下曲面按钮,选择front 基准平面为草绘平面,进入草绘环境后,单击使用边 按钮,绘制如图2-10所示的截面,然后单击完成按钮退出草绘。在拉伸面板中输入深度值为25(可以任意给出,以后将由关系式控制),单击完成按钮,完成拉伸曲面的建立,如图2-11所示。 图2-3“关系”对话框 图2-4 截面参数 图2-5 菜单管理器 图2-6 信息对话图2-7菜单管理器 图2-8输入渐开线方程
基于UG的标准斜齿圆柱齿轮及变位齿轮的参数化建模 所在学院机械工程学院 专业名称机械设计制造及其自动化 年级二零一零级 学生姓名、学号指导教师姓名、职称讲师 完成日期二零一零年五月
摘要 齿轮是机械行业中被广泛应用的零件之一,齿轮轮齿的精确三维造型被视为齿轮机械动态仿真、NC加工、干涉检验以及有限元分析的基础。但在UG7.0软件上并没有专门的模块,所以本文详细阐述的是在UG7.0平台上建立斜齿圆柱齿轮及变位齿轮三维模型的新方法。 由于斜齿轮的轮廓线不是标准曲线,想实现齿轮造型的精确建模有一定的难度。斜齿轮常用的成型方法是扫掠成型法,但此方法实现的建模不准确。为了改变这种缺点,本论文提出了通过建立渐开线、齿根过渡曲线对称方程,精确计算出了分界齿数与曲线起始、终止角度,以自由形式特征下的扫掠为工具的解决方案。该方法符合标准斜齿圆柱齿轮齿廓线的定义,可以实现齿轮的精确建模。 通过实例建模,此方法同样适用于变位齿轮的参数化建模,提高了变位齿轮工程设计的效率。 关键词:斜齿轮及变位齿轮;渐开线;过渡曲线;对称方程;参数化建模 Ⅰ
ABSTRACT Gear is the machinery industry is widely applied in one of the parts, and gear of gear tooth accurate three-dimensional modeling is regarded as dynamic simulation, NC gear machinery processing, the interference of the finite element analysis test and the foundation. But in UG7.0 software and no special module, so in this paper expounds in UG7.0 platform is established on the helical gear shift gears and three dimensional model of the new method. Because the outline of the helical gear line is not standard curve, want to realize the precise gear modelling modeling has the certain difficulty. The helical gear commonly used the shaping method is sweeping ChengXingFa, but this method of modeling is not accurate. In order to change this weakness, this paper puts forward through the establishment of the involute tooth root, transition curve equation of symmetry, accurate boundary calculated with curve starting, termination number Angle, the free form the sweeping characteristics for the tool solutions. This method accord with standard helical gear tooth profile line of the definition, can realize the precise modeling gear. Through the example modeling, this method is also applicable to shift gears of parameterized modeling, improve the gear shift of the project design efficiency Key words: The helical gear and shift gears; Involute; Transition curve; Symmetrical equation; Parameterized modeling Ⅱ
Catia画斜齿轮 0:这种方法同样可以用于画直齿轮 一.斜齿圆柱齿轮的几何特征 斜齿轮齿廓在啮合过程中,齿廓接触线的长度由零逐渐增长,从某一个位置开始又逐渐缩短,直至脱离接触,这种逐渐进入逐渐脱离的啮合过程减少了传动时的冲击、振动和噪声,从而提高了传动的稳定性,故在高速大功率的传动中,斜齿轮传动获得了较为广泛的应用。 二.斜齿圆柱齿轮与直齿圆柱齿轮的几何关系 三.catia画图思路 我们已经看到了,斜齿圆柱齿轮与直齿圆柱齿轮相比,就是斜齿圆柱齿轮两端端面旋转了一个角度,如果旋转角度为零,那这个斜齿圆柱齿轮就是一个直齿圆柱齿轮了,因而直齿圆柱齿轮就是螺旋角为零的特殊斜齿圆柱齿轮。因此,我们可以将直齿圆柱齿轮和斜齿圆柱齿轮用同一个画法画出来,只改变一下参数(为端面的参数)就可以输出不同的直齿或者斜齿的齿轮,大概思路如下:
a.首先用formula输入齿轮各参数的关系; b.画出齿轮齿根圆柱坯子; c.通过输入的公式得出一个齿的齿廓; d.在曲面设计模块下将齿廓平移到坯子的另一端面(通过平移复制一个新的齿廓到另一端面); e.将新的齿廓旋转到特定角度; f.多截面拉伸成形一个轮齿; g.环形阵列这个轮齿 这样,斜齿圆柱齿轮就画完了。 四.catia绘图步骤 1.设置catia,通过tools-->options将relation显示出来,以便待会使用,如图所示: 2.输入齿轮的各项参数 斜齿圆柱齿轮中有如下参数及参数关系,不涉及法向参数 齿数 Z 模数 m 压力角 a 齿顶圆半径 rk = r+m 分度圆半径 r = m*z/2 基圆半径 rb = r*cosa 齿根圆半径 rf = r-1.25*m
Proe齿轮参数,不正之处请指正 标准渐开线齿轮的一般规律及默认参数,可用任何绘图软件绘制标准齿轮截面. (齿顶间隙系数默认为0.25,变位系数是0.) M模数,D表示直径,Z表示齿数,齿底圆直径D1,节圆直径D2, T(周节,指节圆上相邻两齿的中心距,齿距),齿宽L;齿顶宽不是很重要.以M 数为1的齿轮看,可取0.7~1. 同时齿顶圆角和齿根圆角也可稍大或稍小. 1:所有模数是1的齿轮,(顶圆直径与根圆直径差)为4.5,M=2时是9,M=3是13.5, M=4是18,模数每升1其径差增加 4.5;齿顶宽度M=1,d=0.7,M=2,d=1.4,M=3 d=2.1,其齿顶宽d以0.7的倍数增加;模数每升0.5,其齿顶宽d以0.375的倍数增加 2:M=1.5时,顶底圆差为6.75,M=2.5径差11.25,M=3.5径差15.75,也是模数每升1其径差增加4.5. 综上所述模数每升0.5,顶圆和根圆差就增加2.25. 3:节圆又叫分度圆 节元直径D2=齿数Z*M,如画齿数是20,M=1的齿轮,节圆D2=Z*M=20*1=20, 顶圆D=(20+2)*1=22 齿底圆D1=22-4.5=17.5,齿高H=(D-D1)/2=4.5/2=2.25,
公式:M=D/(Z+2),D顶=M*(Z+2),M=T/&(3.14),D表示直径,Z表示齿数, (&=3.14圆周率),T(周节,指节圆上相邻两齿的中心距,齿距); 齿宽L=T/2, 模数M=D顶/(Z+2)=T/&, 周节T=M*&(&表示圆周率,3。14) 奇齿M数=D顶/Z 偶齿轮M数=D/(Z+2) 顶圆直径D顶=M*(Z+2) 齿底圆直径D1=D顶-M*4.5(把模数M看成是从1向上以0.5为单位递增的变量) 节圆直径D2=Z*M 4:齿条是保证齿轮可以在其上顺畅滚动的直齿,其M数等于该齿轮的M 数,齿高相等,齿宽也相等,齿背可画成圆弧或直线都无所谓。 介绍了利用Pro/ENGINEER 2001软件中自动化零件设计程序Program设计渐开线变位直齿圆柱齿轮的方法和步骤。 【关键词】齿轮计算机辅助设计 1 前言 Pro/ENGINEER是由美国PTC公司开发的三维CAD软件,在工业造型设计和模具设计制造行业中得到广泛应用。运用Pro/ENGINEER软件,设计人员可以在计算机上实现虚拟现实设计和制造。 在Pro/ENGINEER软件中,Program模块是自动化零件与组合件设计的一项重要工具,使用者可以经由非常简易且高级的程序语言来控制特征的出现与否、尺寸的大小、零件的出现与否、零件的个数等。当零件或组合件的Program设计完成后,往后读取此零件或组合件时,其各种变化情况即可利用问答式的方式得到不同的形状,以实现产品设计的要求。
本教程分两部分,第一部分主要介绍参数化建模的相关概念和方法,包括参数的概念、参数的设置、关系的概念、关系的类型、如何添加关系以及如何使用关系创建简单的参数化零件(以齿轮为例)。 第二部分介绍参数化建模的其他方法:如族表的应用、如何使用UDF(用户自定义特征)、如何使用Pro/Program创建参数化零件。(后一部分要等一段时间了,呵呵) 参数化设计是proe重点强调的设计理念。参数是参数化设计的核心概念,在一个模型中,参数是通过“尺寸”的形式来体现的。参数化设计的突出有点在于可以通过变更参数的方法来方便的修改设计意图,从而修改设计意图。关系式是参数化设计中的另外一项重要内容,它体现了参数之间相互制约的“父子”关系。 所以,首先要了解proe中参数和关系的相关理论。 一、什么是参数? 参数有两个含义: ●一是提供设计对象的附加信息,是参数化设计的重要要素之一。参数和模型一起存储,参数可以标明不同模型的属性。例如在一个“族表”中创建参数“成本”后,对于该族表的不同实例可以设置不同的值,以示区别。 ●二是配合关系的使用来创建参数化模型,通过变更参数的数值来变更模型的形状和大小。 二、如何设置参数 在零件模式下,单击菜单“工具”——参数,即可打开参数对话框,使用该对话框可添加或编辑一些参数。
1.参数的组成 (1)名称:参数的名称和标识,用于区分不同的参数,是引用参数的依据。注意:用于关系的参数必须以字母开头,不区分大小写,参数名不能包含如下非法字符:!、”、@和#等。 (2)类型:指定参数的类型 ?a)整数:整型数据 ?b)实数:实数型数据 ?c)字符型:字符型数据 ?d)是否:布尔型数据。 (3)数值:为参数设置一个初始值,该值可以在随后的设计中修改 (4)指定:选中该复选框可以使参数在PDM(Product Data Management,产品数据管理)系 统中可见 (5)访问:为参数设置访问权限。 ?a)完全:无限制的访问权,用户可以随意访问参数 ?b)限制:具有限制权限的参数 ?c)锁定:锁定的参数,这些参数不能随意更改,通常由关系式确定。 (6)源:指定参数的来源 ?a)用户定义的:用户定义的参数,其值可以随意修改 ?b)关系:由关系式驱动的参数,其值不能随意修改。 (7)说明:关于参数含义和用途的注释文字 (8)受限制的:创建其值受限制的参数。创建受限制参数后,它们的定义存在于模型中而与 参数文件无关。 (9)单位:为参数指定单位,可以从其下的下拉列表框中选择。 2.增删参数的属性项目
一.带安全阀齿轮泵齿轮零件图所需参数表 法面模数m n4 齿数z10 压力角α20° 全齿高h9.1199 螺旋角β9.63° 螺旋方向右 变位系数x0.40394 精度等级8-7-7JL 齿圈径向跳动Fr0.050 公法线长度变Fw0.040 动公差 基节极限偏差± fpb± 0.016 齿形公差 f f0.014 齿向公差Fb0.011 齿厚上偏差Ess-0.186 下偏差Esi-0.288 二.齿轮测绘和变位齿轮参数测量和计算 一. 任务内容: 根据齿轮测绘的数据,计算出齿轮的各参数,为齿轮零件图提供正确数据。 二 . 准备知识 1.变位齿轮的定义: 通过改变标准刀具对齿轮毛坯的径向位置或改变标准刀具的齿槽宽度切制出的齿形为非标准渐开线齿形的齿轮。 2.齿轮类型判别: 两齿轮为大小相同的一对斜齿轮,齿数为 小齿数应是17 个齿。本齿轮泵中的齿轮齿数少 于10。因此,齿轮是变位齿轮。标准的渐开线齿轮的最 17 个齿,就一定是变位齿轮。变位齿轮使齿轮传 动结构紧凑,齿轮的强度增加。 3.变位齿轮的类型 变位齿轮有两大类:高度变位传动和角度变位传动,如下表所示。 传动类型高度变位传动又称零传动 角度变位传动 正传动负传动 齿数条件z1+z2≥2Zmin z1+z2<2zmin z1+z2>2zmin 变位系数要 x1+x2=0,x1=- x2 ≠0x1+x2>0x1+x2<0 求 传动特点a'=a, α'= α,y=0a'>a, α'> α,y>0a' 小 齿 轮 取 正 变 位 , 允 许 z1
相关主题
文本预览