机械原理第八版课后练习答案(西工大版)(孙恒等)
- 格式:pdf
- 大小:8.16 MB
- 文档页数:88


<机械原理>第八版西工大教研室编第2章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,而且也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-4 何谓最小阻力定律?试举出在机械工程中应用最小阻力定律的1、2个实例。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-20所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别?答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-9 任选三个你身边已有的或能观察到的下列常用装置(或其他装置),试画出其机构运动简图,并计算其自由度。
1)折叠桌或折叠椅;2)酒瓶软木塞开盖器;3)衣柜上的弹簧合页;4)可调臂台灯机构;5)剥线钳;6)磁带式录放音机功能键操纵机构;7)洗衣机定时器机构;8)轿车挡风玻璃雨刷机构;9)公共汽车自动开闭门机构;10)挖掘机机械臂机构;…。
2-10 请说出你自己身上腿部的髋关节、膝关节和踝关节分别可视为何种运动副?试画出仿腿部机构的机构运动简图,并计算其自由度。
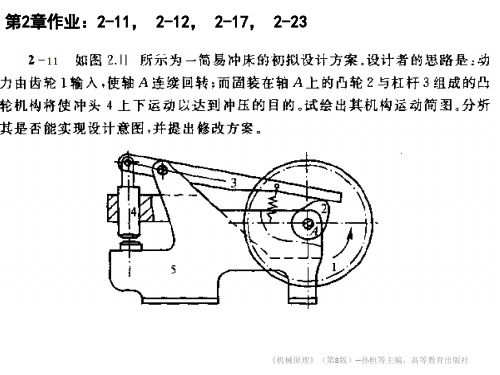
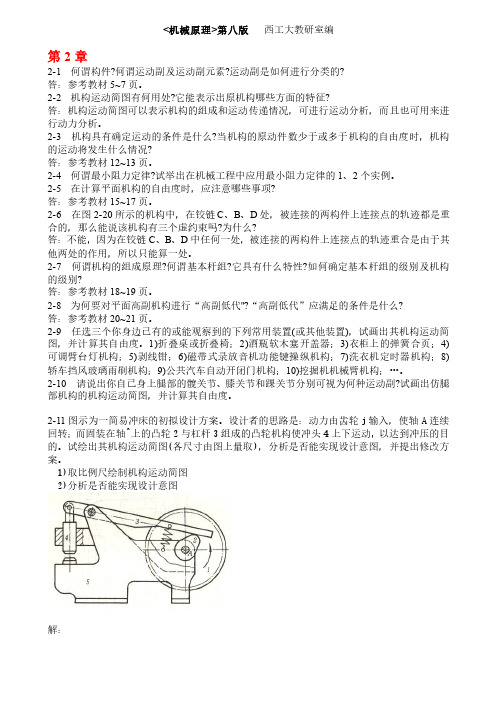
2-11图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮j输入,使轴A连续回转;而固装在轴^上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
<机械原理>第八版西工大教研室编第2章2-1 何谓构件何谓运动副及运动副元素运动副是如何进行分类的答:参考教材5~7页。
2-2 机构运动简图有何用处它能表示出原机构哪些方面的特征答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,而且也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况答:参考教材12~13页。
2-4 何谓最小阻力定律试举出在机械工程中应用最小阻力定律的1、2个实例。
2-5 在计算平面机构的自由度时,应注意哪些事项答:参考教材15~17页。
2-6 在图2-20所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗为什么答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理何谓基本杆组它具有什么特性如何确定基本杆组的级别及机构的级别答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"“高副低代”应满足的条件是什么答:参考教材20~21页。
2-9 任选三个你身边已有的或能观察到的下列常用装置(或其他装置),试画出其机构运动简图,并计算其自由度。
1)折叠桌或折叠椅;2)酒瓶软木塞开盖器;3)衣柜上的弹簧合页;4)可调臂台灯机构;5)剥线钳;6)磁带式录放音机功能键操纵机构;7)洗衣机定时器机构;8)轿车挡风玻璃雨刷机构;9)公共汽车自动开闭门机构;10)挖掘机机械臂机构;…。
2-10 请说出你自己身上腿部的髋关节、膝关节和踝关节分别可视为何种运动副试画出仿腿部机构的机构运动简图,并计算其自由度。
2-11图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮j输入,使轴A连续回转;而固装在轴^上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
<机械原理>第八版西工大教研室编第2章2-1 何谓构件何谓运动副及运动副元素运动副是如何进行分类的答:参考教材5~7页。
2-2 机构运动简图有何用处它能表示出原机构哪些方面的特征答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,而且也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况答:参考教材12~13页。
2-4 何谓最小阻力定律试举出在机械工程中应用最小阻力定律的1、2个实例。
2-5 在计算平面机构的自由度时,应注意哪些事项答:参考教材15~17页。
2-6 在图2-20所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗为什么答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理何谓基本杆组它具有什么特性如何确定基本杆组的级别及机构的级别答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"“高副低代”应满足的条件是什么答:参考教材20~21页。
2-9 任选三个你身边已有的或能观察到的下列常用装置(或其他装置),试画出其机构运动简图,并计算其自由度。
1)折叠桌或折叠椅;2)酒瓶软木塞开盖器;3)衣柜上2-11图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮j输入,使轴A连续回转;而固装在轴^上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
1)取比例尺绘制机构运动简图2)分析是否能实现设计意图解:不合理∵,可改为试绘制其机构示意简图并计算自由度。
解:2-16试计算图示凸轮-连杆组合机构的自由度(a)解: A为复合铰链(b)解:(1)图示机构在D处的结构与图2-1所示者一致,经分析知该机构共有7个活动构件,8个低副(注意移动副F与F’,E与E’均只算作一个移动副),2个高副;因有两个滚子2、4,所以有两个局部自由度,没有虚约束,故机构的自由度为F=3n- (2p l+p h- p’)- F’=3ⅹ7- (2ⅹ8+2-0)- 2=1(2)如将D处结构改为如图b所示形式,即仅由两个移动副组成。
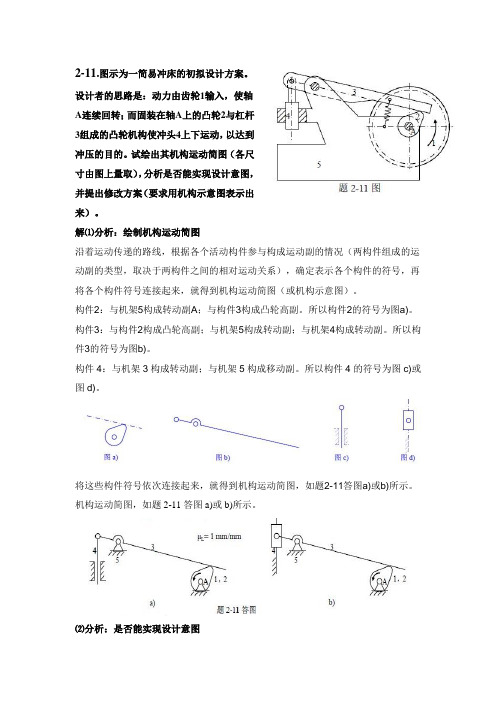
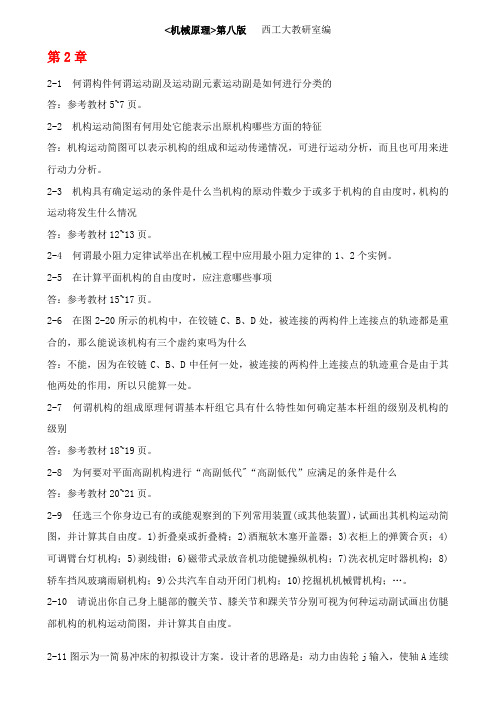
2-11.图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案(要求用机构示意图表示出来)。
解⑴分析:绘制机构运动简图沿着运动传递的路线,根据各个活动构件参与构成运动副的情况(两构件组成的运动副的类型,取决于两构件之间的相对运动关系),确定表示各个构件的符号,再将各个构件符号连接起来,就得到机构运动简图(或机构示意图)。
构件2:与机架5构成转动副A;与构件3构成凸轮高副。
所以构件2的符号为图a)。
构件3:与构件2构成凸轮高副;与机架5构成转动副;与机架4构成转动副。
所以构件3的符号为图b)。
构件4:与机架3构成转动副;与机架5构成移动副。
所以构件4的符号为图c)或图d)。
将这些构件符号依次连接起来,就得到机构运动简图,如题2-11答图a)或b)所示。
机构运动简图,如题2-11答图a)或b)所示。
⑵分析:是否能实现设计意图在机构的结构分析中判断该方案否能实现设计意图,应该从以下两点考虑:①机构自由度是否大于零;②机构原动件的数目是否等于机构自由度的数目。
因此,必须计算该机构的自由度F=3n-(2p L+p H)=3×3-(2×4+1)=0。
因为机构的自由度为F=3n-(2p L+p H)=3×3-(2×4+1)=0可知,该机构不能运动,不能实现设计意图。
⑶分析修改方案因为原动件的数目为1,所以修改的思路为:将机构的自由度由0变为1。
因此,修改方案应有2种。
方案1:给机构增加1个构件(增加3个独立运动)和1个低副(增加2个约束),使机构自由度增加1,即由0变为1。
如题2-11答图c)、d)、e)所示。
方案2:将机构中的1个低副(2个约束)替换为1个高副(1个约束),使机构中的约束数减少1个,从而使机构自由度增加1,即由0变为1。
机械原理第八版课后练习答案第八版第2章 2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的? 答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征? 答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析^p ,而且也可用来进行动力分析^p 。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况? 答:参考教材12~13页。
2-4 何谓最小阻力定律?试举出在机械工程中应用最小阻力定律的1、2个实例。
2-5 在计算平面机构的自由度时,应注意哪些事项? 答:参考教材15~17页。
2-6 在图2-20所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么? 答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别? 答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代“?“高副低代”应满足的条件是什么? 答:参考教材20~21页。
2-9 任选三个你身边已有的或能观察到的下列常用装置(或其他装置),试画出其机构运动简图,并计算其自由度。
1)折叠桌或折叠椅;2)酒瓶软木塞开盖器;3)衣柜上 2-11图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮j输入,使轴A连续回转;而固装在轴^上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析^p 是否能实现设计意图,并提出修改方案。
1)取比例尺绘制机构运动简图 2)分析^p 是否能实现设计意图解:不合理∵,可改为 2-12图示机构为一凸轮齿轮连杆组合机构,试绘制其机构示意简图并计算自由度。