PID参数调整口诀
- 格式:doc
- 大小:13.00 KB
- 文档页数:1

PID常用口诀1.PID常用口诀:参数整定找最佳,从小到大顺序查先是比例后积分,最后再把微分加曲线振荡很频繁,比例度盘要放大曲线漂浮绕大湾,比例度盘往小扳曲线偏离回复慢,积分时间往下降曲线波动周期长,积分时间再加长曲线振荡频率快,先把微分降下来动差大来波动慢。
微分时间应加长理想曲线两个波,前高后低4比1 一看二调多分析,调节质量不会低2.PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下可参照:温度T: P=20~60%,T=180~600s,D=3-180s压力P: P=30~70%,T=24~180s,液位L: P=20~80%,T=60~300s,流量L: P=40~100%,T=6~60s。
3.PID控制的原理和特点在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象﹐或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
比例(P)控制比例控制是一种最简单的控制方式。
其控制器的输出与输入误差信号成比例关系。
当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
积分(I)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。

1、先调节P值(I、D均为0),使其调节速度达到要求。
P值增减先按倍数处理(乘2或除2),直到超越了要求,再将前后两个值取平均值。
2、再根据调节偏差处理I的取值,该值从大往小试验,温度调节初始值可以从10min开始,而流量、压力可以从1min开始。
直到偏差小到符合要求。
3、D值只在超调量过大时采用,取值从小往大试验,以超差幅度小于允许值,又不发生震荡为度。
1. PID常用口诀: 参数整定找最佳,从小到大顺序查,先是比例后积分,最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾,比例度盘往小扳,曲线偏离回复慢,积分时间往下降,曲线波动周期长,积分时间再加长,曲线振荡频率快,先把微分降下来,动差大来波动慢,微分时间应加长,理想曲线两个波,前高后低4比1,2. 一看二调多分析,调节质量不会低 2.PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下可参照:温度T:P=20~60%,T=180~600s,D=3-180s压力P: P=30~70%,T=24~180s, 液位L:P=20~80%,T=60~300s, 流量L: P=40~100%,T=6~60s。
PID控制原理与PID参数的整定方法PID是比例、积分、微分的简称,PID控制的难点不是编程,而是控制器的参数整定。
参数整定的关键是正确地理解各参数的物理意义,PID控制的原理可以用人对炉温的手动控制来理解。
阅读本文不需要高深的数学知识。
1.比例控制有经验的操作人员手动控制电加热炉的炉温,可以获得非常好的控制品质,PID控制与人工控制的控制策略有很多相似的地方。
下面介绍操作人员怎样用比例控制的思想来手动控制电加热炉的炉温。
假设用热电偶检测炉温,用数字仪表显示温度值。
在控制过程中,操作人员用眼睛读取炉温,并与炉温给定值比较,得到温度的误差值。
然后用手操作电位器,调节加热的电流,使炉温保持在给定值附近。
操作人员知道炉温稳定在给定值时电位器的大致位置(我们将它称为位置L),并根据当时的温度误差值调整控制加热电流的电位器的转角。


付老师你好,我是电064班的韩煜博
以下是PID整定口诀,个人感觉口诀只是技巧的归纳,实际调节还需反复调节,调节中中超调量和调节时间是一对矛盾,即系统的稳定性和快速性需要取舍,这要根据实际需要进行偏好设定= ="
参数整定找最佳,从小到大顺序查。
先是比例后积分,最后再把微分加。
曲线振荡很频繁,比例度盘要放大。
曲线漂浮绕大弯,比例度盘往小扳。
曲线偏离回复慢,积分时间往下降。
曲线波动周期长,积分时间再加长。
曲线振荡频率快,先把微分降下来。
动差大来波动慢,微分时间应加长。
理想曲线两个波,前高后低四比一。
一看二调多分析,调节质量不会低。

PID参数整定口诀
首先是P(比例)参数的整定:
1.增大P,系统更快速响应;
2.减小P,系统更稳定。
接下来是I(积分)参数的整定:
1.增大I,系统的超调量减小;
2.减小I,系统的超调量增大。
最后是D(微分)参数的整定:
1.增大D,系统的震荡减小;
2.减小D,系统的震荡增大。
综合考虑的时候,可以使用以下顺序进行整定:
1.先将I和D参数设置为0,只调整P参数;
2.逐渐增大P参数,直到系统出现超调;
3.根据需要的系统响应速度调整P参数;
4.添加I参数,减小系统超调;
5.根据需要的系统稳定性调整I参数;
6.最后添加D参数,减小系统震荡。
需要注意的是,以上只是一种简单的整定顺序,具体情况需要结合实际的系统性能要求来设置参数。
此外,整定PID参数的过程是一个迭代的过程,需要不断地调整和优化,直到满足系统的需求。
总结起来,PID参数整定的口诀可以概括为:根据需要的系统性能目标,逐步调整P、I和D参数,将系统的超调、响应速度和稳定性达到最佳状态。
通过不断迭代和优化,最终得到满足系统要求的PID参数设置。
pid参数调节口诀
1. PID常用口诀: 参数整定找较佳,从小到大顺序查,先是比例后积分,较后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾,比例度盘往小扳,曲线偏离回复慢,积分时间往下降,曲线波动周期长,积分时间再加长,曲线振荡频率快,先把微分降下来,动差大来波动慢,微分时间应加长,理想曲线两个波,前高后低4比1。
2. 一看二调多分析,调节质量不会低2.PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下可参照:
温度T: P=20~60%,T=180~600s,D=3-180s压力P: P=30~70%,T=24~180s,
液位L: P=20~80%,T=60~300s,
流量L: P=40~100%,T=6~60s。
3.PID控制的原理和特点
在工程实际中,应用较为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术较为方便。
即当我们不完全了解一个系统和被控对象﹐或不能通过有效的测量手段来获得系统参数时,较适合用PID控制技术。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。

变频器PID调节1. PID常用口诀: 参数整定找最佳,从小到大顺序查,先是比例后积分,最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾,比例度盘往小扳,曲线偏离回复慢,积分时间往下降,曲线波动周期长,积分时间再加长,曲线振荡频率快,先把微分降下来,动差大来波动慢,微分时间应加长,理想曲线两个波,前高后低4比1,一看二调多分析,调节质量不会低2.常用的PID 参数整定方法a)确定控制器参数数字PID 控制器控制参数的选择,可按连续-时间PID 参数整定方法进行。
在选择数字PID 参数之前,首先应该确定控制器结构。
对允许有静差(或稳态误差)的系统,可以适当选择P 或PD 控制器,使稳态误差在允许的范围内。
对必须消除稳态误差的系统,应选择包含积分控制的PI或PID 控制器。
一般来说,PI、PID 和P控制器应用较多。
对于有滞后的对象,往往都加入微分控制。
b)选择参数控制器结构确定后,即可开始选择参数。
参数的选择,要根据受控对象的具体特性和对控制系统的性能要求进行。
工程上,一般要求整个闭环系统是稳定的,对给定量的变化能迅速响应并平滑跟踪,超调量小;在不同干扰作用下,能保证被控量在给定值;当环境参数发生变化时,整个系统能保持稳定,等等。
这些要求,对控制系统自身性能来说,有些是矛盾的。
我们必须满足主要的方面的要求,兼顾其他方面,适当地折衷处理。
PID 控制器的参数整定,可以不依赖于受控对象的数学模型。
工程上,PID控制器的参数常常是通过实验来确定,通过试凑,或者通过实验经验公式来确定。
常用的方法:一、实验凑试法:实验凑试法是通过闭环运行或模拟,观察系统的响应曲线,然后根据各参数对系统的影响,反复凑试参数,直至出现满意的响应,从而确定PID控制参数。
整定步骤: 实验凑试法的整定步骤为"先比例,再积分,最后微分"。
(1)整定比例控制将比例控制作用由小变到大,观察各次响应,直至得到反应快、超调小的响应曲线。
3.PID参数整定⑴采样周期T符合工程准则。
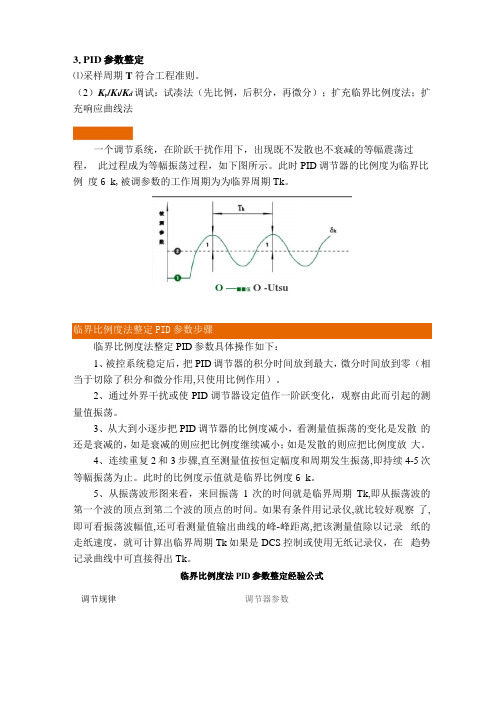
(2)K p/K i/K d调试:试凑法(先比例,后积分,再微分);扩充临界比例度法;扩充响应曲线法一个调节系统,在阶跃干扰作用下,出现既不发散也不衰减的等幅震荡过程,此过程成为等幅振荡过程,如下图所示。
此时PID调节器的比例度为临界比例度6 k,被调参数的工作周期为为临界周期Tk。
O —■■值O -Utsu临界比例度法整定PID参数具体操作如下:1、被控系统稳定后,把PID调节器的积分时间放到最大,微分时间放到零(相当于切除了积分和微分作用,只使用比例作用)。
2、通过外界干扰或使PID调节器设定值作一阶跃变化,观察由此而引起的测量值振荡。
3、从大到小逐步把PID调节器的比例度减小,看测量值振荡的变化是发散的还是衰减的,如是衰减的则应把比例度继续减小;如是发散的则应把比例度放大。
4、连续重复2和3步骤,直至测量值按恒定幅度和周期发生振荡,即持续4-5 次等幅振荡为止。
此时的比例度示值就是临界比例度6 k。
5、从振荡波形图来看,来回振荡1次的时间就是临界周期Tk,即从振荡波的第一个波的顶点到第二个波的顶点的时间。
如果有条件用记录仪,就比较好观察了,即可看振荡波幅值,还可看测量值输出曲线的峰-峰距离,把该测量值除以记录纸的走纸速度,就可计算出临界周期Tk如果是DCS控制或使用无纸记录仪,在趋势记录曲线中可直接得出Tk。
临界比例度法PID参数整定经验公式调节规律调节器参数6、将计算所得的调节器参数输入调节器后再次运行调节系统,观察过程变化情况。
多数情况下系统均能稳定运行状态,如果还未达到理想控制状态,进需要对参数微调即可。
衰减曲线法整定调节器参数通常会按照4:1和10:1两种衰减方式进行,两种方法操作步骤相同,但分别适用于不同工况的调节器参数整定。
纯比例度作用下的自动调节系统,在比例度逐渐减小时,出现4:1衰减振荡过程,此时比例度为4:1衰减比例度6s,两个相邻同向波峰之间的距离为4:1衰减操作周期TS,如下图所示4:1衰减曲线法整定PID参数具体操作如下:1、在闭合的控制系统中,将PID调节器变为纯比例作用,比例度放在较大的数值上。

pid调节参数设置口诀详解
PID调节是控制系统中常用的一种控制方法。
在实际应用中,PID 调节需要设置不同的参数,才能达到最优的控制效果。
下面给大家介绍一下PID调节参数设置的口诀,希望能对大家有所帮助。
一、比例(P)参数设置
1. 比例参数越大,响应越快,但容易产生超调。
2. 比例参数越小,响应越慢,但不容易产生超调。
3. 一般情况下,比例参数初始值取50。
二、积分(I)参数设置
1. 积分参数越大,响应越慢,但容易消除稳态误差。
2. 积分参数越小,响应越快,但容易产生超调和震荡。
3. 一般情况下,积分参数初始值取0.1。
三、微分(D)参数设置
1. 微分参数越大,响应越快,但容易产生震荡。
2. 微分参数越小,响应越慢,但不容易产生震荡。
3. 一般情况下,微分参数初始值取0。
四、总结
1. 初始参数设置可以根据经验值进行设置。
2. 在实际应用中,需要根据实际情况进行参数调整。
3. 调节过程中需要注意及时记录参数变化和系统响应情况,以便进行调节。
以上就是PID调节参数设置口诀的详细介绍,希望对大家有所帮
助。
在实际应用中,需要不断地通过试验和调整,找到最优的PID调节参数组合,以达到控制系统的最佳效果。

经验法PID参数调节口诀经验法整定PID参数是老仪表工们几十年经验的积累,到现在仍得到广泛应用的一种PID参数整定方法。
此法是根据生产操作经验,再结合调节过程的过渡过程曲线形状,对控制系统的调节器参数进行反复的凑试,最后得到调节器的最佳参数。
经验法的PID参数调节口诀说:参数整定寻最佳,从大到小顺次查。
先是比例后积分,最后再把微分加。
曲线振荡很频繁,比例度盘要放大。
曲线漂浮绕大弯,比例度盘往小扳。
曲线偏离回复慢,积分时间往下降。
曲线波动周期长,积分时间再加长。
理想曲线两个波,调节过程高质量。
这是一首流传广泛、影响很大的调节器PID参数调节口诀,该PID调节口诀最早出现在1973年11月出版的《化工自动化》一书中,流传至今已有几十年了。
现在网上流传的PID调节口诀,大多是以该PID参数调节口诀作为蓝本进行了补充和改编而来的,如“曲线振荡频率快,先把微分降下来,动差大来波动慢。
微分时间应加长”。
还有的加了“理想曲线两个波,前高后低四比一,一看二调多分析,调节质量不会低”等。
为便于理解和应用,现对该PID参数调节口诀进行较详细的分析。
以下的分析及结论对临界比例度法、衰减曲线法也是有参考价值的。
先谈谈PID参数调节口诀“参数整定寻最佳,从大到小顺次查”中的“最佳”问题。
很多仪表工都有这样的体会,在现场的调节器工程参数整定中,如果只按4:1衰减比进行整定,那么可以有很多对的比例度和积分时间同样能满足4:1的衰减比,但是这些对的数值并不是任意地组合,而是成对地,一定的比例度必须与一定的积分时间组成一对,才能满足衰减比的条件,改变其中之一,另一个也要随之改变。
因为是成对出现的,所以才有调节器参数的“匹配”问题。
而在实际应用中只有增加个附加条件,才能从多对数值中选出一对适合的值。
这一对适合的值通常称为“最佳整定值”。
“从大到小顺次查”中“查”的意思就是找到调节器参数的最佳匹配值。
而“从大到小顺次査”"是说在具体操作时,先把比例度、积分时间放至最大位置,把微分时间调至零。


我们先看网上流传的PID参数整定口诀:参数整定找最佳,从小到大顺序查先是比例后积分,最后再把微分加曲线振荡很频繁,比例度盘要放大曲线漂浮绕大湾,比例度盘往小扳曲线偏离回复慢,积分时间往下降曲线波动周期长,积分时间再加长曲线振荡频率快,先把微分降下来动差大来波动慢。
微分时间应加长理想曲线两个波,前高后低4比1一看二调多分析,调节质量不会低。
它是什么时候开始在网上流传的不太清楚。
现在再看另一首口诀:参数整定寻最佳,从大到小顺次查。
先是比例后积分,最后再把微分加。
曲线振荡很频繁,比例度盘要放大。
曲线漂浮绕大弯,比例度盘往小扳。
曲线偏离回复慢,积分时间往下降。
曲线波动周期长,积分时间再加长。
理想曲线两个波,调节过程高质量。
这是一首用经验法进行PID参数工程整定的口诀,该口诀流传至今已有几十年了,其最早出现在1973年11月出版的《化工自动化》一书中。
现在网上流传的口诀,看来大多是以该口诀作为蓝本进行了补充和改编而来的,如:“ 曲线振荡频率快,先把微分降下来,动差大来波动慢。
微分时间应加长。
”还有的加了:“ 理想曲线两个波,前高后低4比1,一看二调多分析,调节质量不会低。
”等等。
现dlr结合这两首口诀,进行一些浅析。
控制系统在设计、整定和运行中,衡量系统质量的依据就是系统的过渡过程。
当系统的输入为阶跃变化时,系统的过渡过程表现有:发散振荡、等幅振荡、衰减振荡、单调过程等形式。
在多数情况下,dlr都希望得到衰减振荡的过渡过程,且认为如图1所示的过渡过程最好,并把它作为衡量控制系统质量的依据。
图1 过渡过程质量指标示意图选用该曲线作为控制系统质量指标的理由是:它第一次回复到给定值较快,以后虽然又偏离了,但偏离不大,并且只有极少数几次振荡就稳定下来了。
定量的看,第一个波峰B的高度是第二个波峰B'高度的4倍,所以这种曲线又叫做4:1衰减曲线。
在调节器工程整定时,以能得到4:1的衰减过渡过程为最好,这时的调节器参数可叫最佳参数。

PID 参数整定口诀参数整定找最佳, 从小到大顺序查。
先是比例后积分, 最后再把微分加。
曲线振荡很频繁, 比例度盘要放大。
曲线漂浮绕大弯,比例度盘往小扳。
曲线偏离回复慢, 积分时间往下降。
曲线波动周期长, 积分时间再加长。
曲线振荡频率快, 先把微分降下来。
动差大来波动慢, 微分时间应加长。
理想曲线两个波, 前高后低四比一。
一看二调多分析, 调节质量不会低。
先把系统调为纯比例作用,然后增强比例作用让系统振荡,记录下比例作用和振荡周期,然后这个比例作用乘以0.6,积分作用适当延长:0.6p m K K =*4d p K K πω=* i p K K ωπ=*其中,p K 为比例控制参数;i K 为积分控制参数;d K 为微分控制参数;m K 为系统开始振荡时的比例值;ω为极坐标下振荡时的频率。
比例积分作用就是在被调量波动的时候,纯比例和纯积分作用的叠加。
通过判断输出量的极点靠近被调量的极值还是设定值可以判断比例和积分作用的强弱。
参数整定的几个原则:1) 把串级调节系统孤立成两个单回路。
把主、副调隔离开来,先整定一个回路,再全面考虑; 2) 至于先整定内回路还是先整定外回路,因系统而已。
一般来说,对于调节周期长的系统可以先整定内回路。
我们还可以手动调整系统稳定性,投入自动,先整定内回路; 3) 把相互耦合的系统解耦为几个独立的系统,在稳态下,进行参数判断。
让各个系统之间互不干扰,然后再考虑耦合;4) 把P 、I 、D 隔离开来。
先去掉积分、微分作用,让系统变为纯比例调节方式。
然后在考虑积分,然后在考虑微分。
整定比例作用先把系统设为纯比例作用,逐渐加大比例作用,一直到系统发生等幅振荡,然后在这个基础上适当减小比例作用即可,或者把比例增益乘以0.6~0.8。
如何判断振荡?一般来说,对于一个简单的单回路调节系统,比例作用很强的时候,振荡周期是很有规律的,基本上呈正弦波形。
而极弱参数下的波动也有一定的周期,但是在一个波动周期内,往往参杂了几个小波峰。

PID常用口诀:参数整定找最佳,从小到大顺序查,先是比例后积分,最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾,比例度盘往小扳,曲线偏离回复慢,积分时间往下降,曲线波动周期长,积分时间再加长,曲线振荡频率快,先把微分降下来,动差大来波动慢,微分时间应加长,理想曲线两个波,前高后低4比1。
PID控制算法:关键的参数Kc(Gain,增益),Ti(积分时间常数),Td(微分时间常数),Ts(采样时间),在S7-200中PID功能是通过PID指令功能块实现。
通过定时(按照采样时间)执行PID功能块,按照PID 运算规律,根据当时的给定、反馈、比例-积分-微分数据,计算出控制量。
也就说这些参数是通过PLC的功能块实现的.一般的控制就在OB35里调用FB58就行了,只需要输入设定值,输出值和过程值的地址就行了。
还有在DB58里设置一下。
1、PID是经典控制(使用年代久远)2、PID是误差控制()对液压泵转速进行控制除PLC外还要:1、变频器-作为电机驱动;2、差动变压器-作为输出反馈。
PID怎么对误差控制,听我细细道来:所谓“误差”就是命令与输出的差值。
比如你希望控制液压泵转速为1500转(“命令电压”=6V),而事实上控制液压泵转速只有1000转(“输出电压”=4V),则误差: e=500转(对应电压2V)。
如果泵实际转速为2000转,则误差e=-500转(注意正负号)。
该误差值送到PID控制器,作为PID控制器的输入。
PID控制器的输出为:误差乘比例系数Kp+Ki*误差积分+Kd*误差微分。
Kp*e + Ki*∫edt + Kd*(de/dt)(式中的t为时间,即对时间积分、微分)上式为三项求和(希望你能看懂),PID结果后送入电机变频器或驱动器。
从上式看出,如果没有误差,即e=0,则Kp*e=0;Kd*(de/dt)=0;而Ki*∫edt 不一定为0。
三项之和不一定为0。
总之,如果“误差”存在,PID就会对变频器作调整,直到误差=0P I D不是算出来的它是几个参数通过这几个参数可以调整系统的控制性能P 》》》比例I 》》》》积分D 》》》》微分P决定系统调整快慢性能P越大达到设定值越快但是会过冲容易引起震荡I决定到达后的稳定I越大越稳定但是改变设定值容易反应慢D决定在稳定后设定改变后变化快慢就像是一个运动员跑步起跑、跑步、停止一样P是跑的快慢性太快到达终点容易过冲I是最后刹车是否稳定D是对指令反应速度这三个参数主要由控制要求和系统本身固有的性能决定希望能对你有帮助你没有PLC的书嘛?书上写的较清楚PLC在执行PID调节指令时,须对算法中的9个参数进行运算,为此S7-200的PID指令使用一个存储参数的回路表。
pid参数整定口诀在控制系统的整定过程中,PID参数的调节是至关重要的一步。
PID控制器的三个参数(比例增益Kp、积分时间Ti和微分时间Td)的合理调节可以确保系统的稳定性、鲁棒性和响应速度。
以下是一些常用的PID参数整定口诀和参考内容,帮助工程师更好地掌握PID控制器的调节技巧。
1. 哈勃曼法则(Huffman法):- 比例增益Kp:当Ti和Td都为0时,首先增大Kp,直到系统开始振荡,然后将Kp减小一半,以此为起点进行调节。
- 积分时间Ti:增大Ti,直到消除系统的超调现象和稳态误差。
- 微分时间Td:增大Td,以使系统的响应更加快速,降低超调。
2. 柯恩-库革曼法则(Cohen-Coon法):- 响应时间方法:先测量系统的响应时间T,然后根据不同的系统类型,选择相应的PID参数,通过以下公式进行计算: - 比例增益Kp = 0.5 / Kc- 积分时间Ti = 0.54 * T- 微分时间Td = 0.33 * T- 此方法适用于一阶系统、二阶系统以及一些特定的常见非线性系统。
3. 托伯曼法则(Tyreus-Luyben法):- 针对超调过大或过小的系统:增加Kp以减小超调,然后增加Ti以增加稳态精度,最后增加Td以加快系统的响应速度。
- 针对超调合适但响应速度过慢的系统:增大Kp以加快响应速度,增加Ti以减小超调,最后增加Td以消除静差。
4. Ziegler-Nichols法则:- 原始的Ziegler-Nichols法则有两种方法:经验法则和整定法则。
- 经验法则:从系统的临界点开始调节,测量临界增益Kcu 和周期Tu,根据系统类型选择合适的PID参数,如下:- 比例增益Kp = 0.6 * Kcu- 积分时间Ti = 0.5 * Tu- 微分时间Td = 0.125 * Tu- 整定法则:通过逐步增大Kp,找到最小振荡增益Kpu和周期Tpu。
根据系统类型选择合适的PID参数,如下:- 比例增益Kp = 0.4 * Kpu- 积分时间Ti = 0.5 * Tpu- 微分时间Td = 0.125 * Tpu5. Lambda法则:- 在某个给定的超调限制下,选择合适的响应时间λ(一般取系统的时间常数),根据系统类型选择合适的PID参数,如下:- 比例增益Kp = (0.6/λ) * Kcu- 积分时间Ti = (1.2/λ) * Tu- 微分时间Td = (0.075/λ) * Tu6. 神经网络整定法则:- 利用神经网络和优化算法,通过对系统建模和参数搜索,自动调节PID参数以实现最佳控制效果。
PID参数调整口诀导语:PID是一个闭环控制算法。
因此要实现PID算法,必须在硬件上具有闭环控制,就是得有反馈。
比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制路线上,下面也将以转速控制为例。
(一)PID基本概述:1,PID是一个闭环控制算法。
因此要实现PID算法,必须在硬件上具有闭环控制,就是得有反馈。
比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制路线上,下面也将以转速控制为例。
2,PID是比例(P)、积分(I)、微分(D)控制算法。
但并不是必须同时具备这三种算法,也可以是PD,PI,甚至只有P算法控制。
我以前对于闭环控制的一个最朴素的想法就只有P控制,将当前结果反馈回来,再与目标相减,为正的话,就减速,为负的话就加速。
现在知道这只是最简单的闭环控制算法。
3,比例(P)、积分(I)、微分(D)控制算法各有作用:比例,反应系统的基本(当前)偏差e(t),系数大,可以加快调节,减小误差,但过大的比例使系统稳定性下降,甚至造成系统不稳定;积分,反应系统的累计偏差,使系统消除稳态误差,提高无差度,因为有误差,积分调节就进行,直至无误差;微分,反映系统偏差信号的变化率e(t)-e(t-1),具有预见性,能预见偏差变化的趋势,产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,因此可以改善系统的动态性能。
但是微分对噪声干扰有放大作用,加强微分对系统抗干扰不利。
积分和微分都不能单独起作用,必须与比例控制配合。
4,控制器的P,I,D项选择:根据实际的目标系统调试出最佳的PID参数。
(二)常用控制规律的特点:1、比例控制规律P:采用P控制规律能较快地克服扰动的影响,它的作用于输出值较快,但不能很好稳定在一个理想的数值,不良的结果是虽较能有效的克服扰动的影响,但有余差出现。
它适用于控制通道滞后较小、负荷变化不大、控制要求不高、被控参数允许在一定范围内有余差的场合。

电子知识PID(169)1.PID常用口诀: 参数整定找最佳,从小到大顺序查,先是比例后积分,最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾,比例度盘往小扳,曲线偏离回复慢,积分时间往下降,曲线波动周期长,积分时间再加长,曲线振荡频率快,先把微分降下来,动差大来波动慢,微分时间应加长,理想曲线两个波,前高后低4比1,一看二调多分析,调节质量不会低2.PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下可参照:温度T: P=20~60%,T=180~600s,D=3-180s压力P: P=30~70%,T=24~180s,液位L: P=20~80%,T=60~300s,流量L: P=40~100%,T=6~60s。
3.PID控制的原理和特点在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象﹐或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。
PID 控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
比例(P)控制比例控制是一种最简单的控制方式。
其控制器的输出与输入误差信号成比例关系。
当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
积分(I)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。
pid最通俗的理解和参数设置口诀在生活中,PID控制就像是我们调整心情的一种方法。
简单来说,PID就是一种控制系统,用来让系统按照我们希望的方式运行。
它的名字其实就是比例(P)、积分(I)和微分(D)的缩写,每个部分都有自己的“职责”,就像家庭中的每个人都有不同的角色一样。
1. PID控制的基本概念1.1 比例(P)控制比例控制的核心就是“比例”,这部分负责根据当前的误差调整系统。
如果你设定了一个目标值,比如你想要把温度调到25°C,而实际温度是20°C,比例控制会试图根据这个误差来增加加热的强度。
它的工作原理就是“误差越大,调整得越多”,就像你看到房间很乱,越是乱,你就越想快点整理好一样。
1.2 积分(I)控制积分控制则是处理长期累积的误差。
假设你的房间总是有点儿乱,比例控制可能在短期内能起作用,但时间长了,可能会出现细微的偏差。
积分控制就像是那种记性很好的朋友,细心地记住了每一个小细节,并且不断地纠正这些小问题。
它会通过积分计算,逐渐调整系统,直到误差完全消失。
1.3 微分(D)控制微分控制的作用是预测误差的变化趋势,提前做出反应。
就好比你看到房间有些凌乱,就开始提前收拾,这样可以防止问题变得更加严重。
它专注于误差变化的速率,帮助系统快速稳定下来,避免过度的波动。
2. PID参数设置的口诀2.1 比例系数(Kp)的设置比例系数就像是你的“心态调整器”,决定了你对误差的反应速度。
设置比例系数的时候,咱们可以记住“快稳适中”,意思是不要太急也不要太慢。
比例系数太大了,系统可能会变得不稳定;太小了,反应就会迟缓。
所以,找到一个合适的值,就像是找到你心情的平衡点。
2.2 积分系数(Ki)的设置积分系数则是调整你“耐心”的程度。
设定的时候,记住“慢来稳”,不要着急。
积分系数太高,可能会导致系统的过度调节,造成波动;太低,可能会导致系统反应缓慢。
就像你处理长期积累的琐事,慢慢来,稳定才是关键。
PID参数调整口诀:
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。
微分时间应加长
理想曲线两个波,前高后低四比一
一看二调多分析,调节质量不会低
若要反应增快,增大P减小I
若要反应减慢,减小P增大I
如果比例太大,会引起系统震荡
如果积分太大,会引起系统迟钝
其中有些较难理解的句子,给大家解释一番:
1、曲线漂浮绕大弯——
指负载曲线是发散的,没有逐渐收敛到目标值上,这是非常失败的波形曲线,是调试不成功的。
2、曲线偏离回复慢——
指负载曲线虽然不发散,逐渐收敛到了目标值上,但是收敛速度较慢。
这也算不上是调试得很成功的波形,还有需要优化的地方。
3、曲线波动周期长——
这是指负载曲线要经过长时间的波动后,才能逐渐回到稳定值上。
即先要经过长时间的振荡,然后才能稳定在目标值上,也是不太理想的波形曲线。
4、曲线振荡频率快——
这是指负载曲线频繁、快速的振荡,半天稳定不下来。
一般,出现这种波形的原因,是因为你的调节器调节力度太猛了,需要缓和一下。
可以通过减小调节器的比例P参数值,或增大积分时间常数I 参数的值,来达到缓和的目的。