基于蜂窝网无线定位技术TDOA的误差分析
- 格式:pdf
- 大小:2.30 MB
- 文档页数:7



基于蜂窝系统无线定位移动台误差累积函数蜂窝无线定位技术的研究引言在美国,911是非常重要、也非常知名的紧急求助电话。
每当人们在遇到紧急情况时总是会想到它。
不管用户处于何地,只要使用有线电话拨打这个号码,系统便可以在接通电话的同时,用非常短的时间确定用户所在地,并从数据库中获取一些相关的信息,为救援人员提供重要的帮助。
这项紧急求助电话业务,有效地保护了公众的人身和财产安全。
这就是我们平时所讲的定位技术。
随着移动通信的发展,无线蜂窝网的覆盖面越来越广,移动电话的普及率越来越高,移动电话呼叫“110”、“120”、“119”等报警电话求援的比例大幅上升,移动电话在报告突发事件中的地位也就越来越重要。
因此,蜂窝移动通信网络对拨打紧急呼叫电话的用户具有定位能力是非常有意义的。
近年来,随着蜂窝移动通信技术的迅速发展,蜂窝无线定位技术越来越受到人们的重视。
这主要归因于政府的强制性要求和市场本身的驱动。
美国联邦政府通信委员会(FCC)于1996年10月颁布了无线E911(Emergency call 911)呼叫应急服务功能,其核心是要求所有移动通信网络必须分阶段的提供紧急呼叫用户的经纬度位置信息。
针对E911定位需求的具体实施,各国主要大公司均就GSM、IS-95 CDMA以及第三代移动通信系统开始制定各自的定位实施方案。
例如,全球三大通信厂商——爱立信、摩托罗拉和诺基亚就于2000年10月成立了“位置信息互操作论坛LIF(Location Interoperability Forum)”,其目标是在全球范围内的无线网络和终端上提供基于位置的业务。
另一方面,移动通信用户对移动定位业务的需求日益迫切。
蜂窝网络无线定位技术能够在移动台处于空闲状态或通话状态的情况下获取其地理位置等信息,利用移动台的定位信息,运营商可以为用户提供各种增值业务,如智能交通、紧急情况救援、位置环境信息查询、广告发布等等,同时还可以作为移动通信网络运行、维护和管理的辅助数据。
基于TDOA的定位技术性能分析作者:杨雪峰吴琼来源:《卷宗》2011年第08期摘要:本文提出了一种能应用在无线传感器网络中,基于扩展卡尔曼滤波的TDOA定位方案:先利用测得的TDOA值进行定位,再将算法得出的目标节点估计值作为扩展卡尔曼的观测值进行滤波估计,以四个锚节点为例,进行了仿真分析。
该定位方案不需要节点间全局同步,能有效减小节点设计的额外硬件开销,降低了节点功耗和成本。
关键词:无线传感器网络;TDOA算法;扩展卡尔曼滤波的TDOA算法1 概述无线传感器网络(无线传感器网络,Wireless Sensor Network)是微机电系统(MEMS Micro-Electro-Mechanism-System)、片上系统(SOC,Syetem-On-Chip)和无线通信技术高度集成而孕育出的一种新型信息获取和处理模式。
在传感器网络的许多应用中,用户关心的一个重要问题是在什么位置或区域发生了特定事件。
节点定位问题是传感器网络诸多应用的前提,实现传感器节点的定位对各种应用有着及其重要的作用,也是传感器网络研究中的基础性问题和热点问题之一。
TDOA(Time Difference of Arrival)定位技术是目前在WSN定位系统中最具发展潜力的目标定位技术。
为了提高定位精度,本文提出一种基于时间测量值的无线传感器网络定位算法,该方法基本思想:采用改进的泰勒序列展开算法对目标节点进行初始位置估计,并用扩展卡尔曼滤波器在后台PC上对算法估计值进行集中滤波处理。
2 网络模型与参数获取本文将简要介绍适合于定位算法应用的户外传感器网络简单模型。
本文所讨论的传感器网络由许多未知位置且随机分布的SN (sensor node)传感器节点和几个已知位置的锚节点(beacon node)组成,如下图所示,所有节点都处于静止状态。
TDOA估计值的获取方法简述如下:锚节点周期性地向它射程内的待测目标SN节点及其他锚节点发射射频信标信号,若目标SN节点不在锚节点的射程内,我们可以通过将待监测的区域划分成几个小的子区域并增加锚节点的方法来处理。
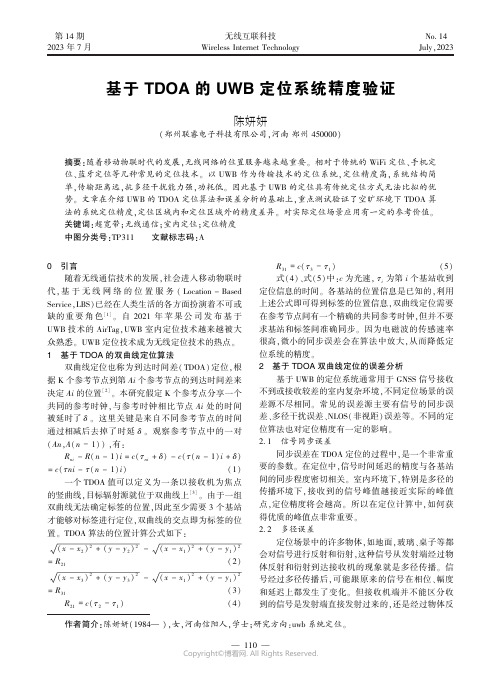
第14期2023年7月无线互联科技Wireless Internet TechnologyNo.14July,2023作者简介:陈妍妍(1984 ),女,河南信阳人,学士;研究方向:uwb 系统定位㊂基于TDOA 的UWB 定位系统精度验证陈妍妍(郑州联睿电子科技有限公司,河南郑州450000)摘要:随着移动物联时代的发展,无线网络的位置服务越来越重要㊂相对于传统的WiFi 定位㊁手机定位㊁蓝牙定位等几种常见的定位技术㊂以UWB 作为传输技术的定位系统,定位精度高,系统结构简单,传输距离远,抗多径干扰能力强,功耗低㊂因此基于UWB 的定位具有传统定位方式无法比拟的优势㊂文章在介绍UWB 的TDOA 定位算法和误差分析的基础上,重点测试验证了空旷环境下TDOA 算法的系统定位精度,定位区域内和定位区域外的精度差异㊂对实际定位场景应用有一定的参考价值㊂关键词:超宽带;无线通信;室内定位;定位精度中图分类号:TP311㊀㊀文献标志码:A0㊀引言㊀㊀随着无线通信技术的发展,社会进入移动物联时代,基于无线网络的位置服务(Location -Based Service,LBS)已经在人类生活的各方面扮演着不可或缺的重要角色[1]㊂自2021年苹果公司发布基于UWB 技术的AirTag,UWB 室内定位技术越来越被大众熟悉㊂UWB 定位技术成为无线定位技术的热点㊂1㊀基于TDOA 的双曲线定位算法㊀㊀双曲线定位也称为到达时间差(TDOA)定位,根据K 个参考节点到第Ai 个参考节点的到达时间差来决定Ai 的位置[2]㊂本研究假定K 个参考点分享一个共同的参考时钟,与参考时钟相比节点Ai 处的时间被延时了δ㊂这里关键是来自不同参考节点的时间通过相减后去掉了时延δ㊂观察参考节点中的一对(An ,A (n -1)),有:R ni -R (n -1)i =c (τni +δ)-c (τ(n -1)i +δ)=c (τni -τ(n -1)i )(1)一个TDOA 值可以定义为一条以接收机为焦点的竖曲线,目标辐射源就位于双曲线上[3]㊂由于一组双曲线无法确定标签的位置,因此至少需要3个基站才能够对标签进行定位,双曲线的交点即为标签的位置㊂TDOA 算法的位置计算公式如下:(x -x 2)2+(y -y 2)2-(x -x 1)2+(y -y 1)2=R 21(2)(x -x 3)2+(y -y 3)2-(x -x 1)2+(y -y 1)2=R 31(3)R 21=c (τ2-τ1)(4)R 31=c (τ3-τ1)(5)式(4)㊁式(5)中:c 为光速,τi 为第i 个基站收到定位信息的时间㊂各基站的位置信息是已知的,利用上述公式即可得到标签的位置信息,双曲线定位需要在参考节点间有一个精确的共同参考时钟,但并不要求基站和标签间准确同步㊂因为电磁波的传感速率很高,微小的同步误差会在算法中放大,从而降低定位系统的精度㊂2㊀基于TDOA 双曲线定位的误差分析㊀㊀基于UWB 的定位系统通常用于GNSS 信号接收不到或接收较差的室内复杂环境,不同定位场景的误差源不尽相同㊂常见的误差源主要有信号的同步误差㊁多径干扰误差㊁NLOS(非视距)误差等㊂不同的定位算法也对定位精度有一定的影响㊂2.1㊀信号同步误差㊀㊀同步误差在TDOA 定位的过程中,是一个非常重要的参数㊂在定位中,信号时间延迟的精度与各基站间的同步程度密切相关㊂室内环境下,特别是多径的传播环境下,接收到的信号峰值越接近实际的峰值点,定位精度将会越高㊂所以在定位计算中,如何获得优质的峰值点非常重要㊂2.2㊀多径误差㊀㊀定位场景中的许多物体,如地面,玻璃㊁桌子等都会对信号进行反射和衍射,这种信号从发射端经过物体反射和衍射到达接收机的现象就是多径传播㊂信号经过多径传播后,可能跟原来的信号在相位㊁幅度和延迟上都发生了变化㊂但接收机端并不能区分收到的信号是发射端直接发射过来的,还是经过物体反射衍射后收到的㊂而定位解算的误差程度是由这些信号经过多径的偏差程度来决定的㊂2.3㊀NLOS误差㊀㊀常见的定位场景中,信号的发射端和接收端经常存在各种遮挡,导致信号从发射端到接收端没有直达路径㊂这种信号经过衍射后同样也可以到达接收机,但接收机接收到的衍射信号经历了更多的延迟㊂这种衍射信号给定位带来的误差就是NLOS误差㊂2.4㊀环境及其他误差㊀㊀环境中影响电磁波的因素很多,水对电磁波的吸收就会造成湿度较大的天气下定位系统测试精度低于湿度低的天气下的测试精度㊂除了自然环境因素外,同频段的电子设备也会对UWB定位有干扰,高压电所产生的磁场也对定位系统精度有影响㊂2.5㊀定位算法精度的影响㊀㊀在TDOA定位算法中,初始值的选定为基站三角形的几何中心点㊂在得到TDOA测量值后,用迭代最小二乘法计算位置估计点的修正值,来逐步修正位置估计点㊂经过若干次迭代,使估计点与实际位置点的偏差逐步缩小㊂若修正值逐步收敛,并最终小于门限值,即为定位收敛成功;若修正值发散,或迭代超过最大迭代次数仍大于门限值,则视为定位收敛失败㊂定位系统的实时性和定位精度是可以根据需要动态调整㊂门限值和最大迭代次数的调整,可以在牺牲部分实时性的同时,一定程度上增加系统的定位精度㊂当精度下降一部分的时候,解算系统定位所需要的时间也会相应减少㊂3㊀基于TDOA定位系统的构建㊀㊀一个典型的TDOA二维定位单元,包含四个定位基站,一个定位标签㊂主基站发送信号确保参与定位基站的时钟同步㊂定位标签发送信号,定位基站接收信号并将数据传至引擎,引擎根据基站的准确位置坐标计算出定位标签的位置㊂4㊀基于TDOA的定位系统测试㊀㊀测试同步误差和同步标准差的时间单位为15.65ps,按照电磁波的传播速度c=3ˑ108m/s,不同时间误差条件下的理论距离误差如下:1ns对应的距离误差为30cm(1ns=10-9s,1ns约等于64个计数单位)㊂同步误差主要受上层基站距离的精度影响较大,在基站坐标测量比较准确的情况下,同步误差理论上会很小㊂4.1㊀空旷环境动态测试验证㊀㊀布设环境:20mˑ20m㊂室外空旷环境下同步标准差为20~30个单位㊂测试验证室外空旷环境下,二维定位区域内动态定位精度㊂测试环境空旷无遮挡,基站坐标的测量会存在一定的误差㊂动态测试选取平行于Y轴上的一条直线和区域内半径为1m的圆周运动2种方式㊂因考虑数据量的问题,直线运动沿直线往返2次,圆周运动沿圆周行走2周㊂动态定位精度如图1 2所示㊂图1㊀直线往返运动定位图2㊀圆周运动定位室外动态测试结果表明,室外空旷环境下,TDOA二维定位区域内的动态精度可以达到20cm以内㊂4.2㊀空旷环境二维区域外定位精度测试验证㊀㊀测试场景同动态定位场景,环境空旷无遮挡,地面为水泥路面㊂同步标准差为20~30个单位㊂基站坐标测量存在一定的误差㊂布设环境:20mˑ20m㊂区域内㊁外测试结果分别如表1 2所示㊂表1㊀区域内测试结果真实坐标定位均方根误差/cm 均值标准差(0,1000) 6.540.64 (500,500)15.010.64 (500,1500)11.110.77 (1000,0)15.030.94 (1000,1000) 6.210.67 (1000,2000)31.19 1.70 (1500,500)33.720.81 (1500,1500) 5.80 1.15 (2000,1000)30.18 1.61表2㊀区域外测试结果真实坐标定位均方根误差/cm均值标准差(-100,1000)256.85 1.76 (1000,-100)42.530.56 (1000,2100)28.49 2.06 (2100,1000)38.89 1.33从测试结果看,区域内精度基本满足30cm,区域外精度各边界表现不尽相同,最差精度大于1m㊂5 结语㊀㊀本文主要对UWB基于TDOA的定位算法和误差进行全面分析,进行了室外空旷环境的定位精度测试验证,对比相同环境下TDOA区域内和区域外的定位精度㊂测试结果表明,综合考虑测量误差,区域内实际测试精度基本都可以满足20cm内,定位稳定㊂区域边界精度略差,测试最大误差30~40cm㊂TDOA算法区域外定位的准确度和稳定度都不能保证,无法满足厘米级定位㊂参考文献[1]孙锦中.基于UWB技术的无线定位系统的研究与测试[J].上海电力学院学报,2011(4):333-336. [2]张媛,缪相林,王梅,等.UWB测距室内定位算法误差分析[J].导航定位学报,2020(6):132-136. [3]田增山,申文求,郑毅.无线定位系统的误差分析[J].电信科学,2005(6):5-8.(编辑㊀姚㊀鑫)TDOA-based UWB positioning system accuracy verificationChen YanyanZhengzhou Lianrui Electronic Technology Co. Ltd. Zhengzhou450000 ChinaAbstract Since AIRTAG entered the field of vision in2021 UWB technology in AIRTAG has been watched by the public and consumer-level markets and UWB-based interior positioning technology is also well known and used in life.With the development of the mobile phone era the location services of wireless networks are becoming more and more important and the research and development and application scenarios of ultra-broadband wireless communication technology are also increasing.Several traditional positioning technologies such as satellite positioning Bluetooth positioning WiFi positioning mobile phone positioning etc.Various positioning methods have different limitations.The communication network with UWB as transmission technology has many advantages with simple structure strong anti-multi-diameter interference ability low power consumption long transmission distance and high positioning accuracy.Therefore the positioning of UWB-based positioning has the advantages that cannot be compared with traditional positioning methods.On the basis of UWB s TDOA positioning algorithm and error analysis this thesis focuses on the test accuracy of TDOA in different environments and the accuracy differences in the positioning area and outside the positioning area.It has a certain reference value for the actual positioning scenario application.Key words ultra-broadband wireless communication indoor positioning positioning accuracy。


第18卷第4期重庆邮电学院学报(自然科学版)Vol.18 No.4 2006年8月Journal of Chongqing University of Posts and Telecommunications(Natural Science)Aug.2006文章编号:1004 5694(2006)04 0427 03 一种基于无线蜂窝网络辅以同步卫星的TDOA定位*张毅,罗元(重庆邮电大学智能系统及机器人研究所,重庆400065)摘 要:基于蜂窝的定位与基于卫星的定位都是当今无线定位的研究热点。
在分析了独立采用基站T DO A定位和同步卫星T DO A定位技术的优缺点基础之上,提出了蜂窝网无线定位辅以同步卫星T D OA的定位方法,给出了各自的T DO A定位的算法,并分别对T DO A定位性能进行了仿真和分析,表明这种定位方法弥补了独立的蜂窝网无线定位和同步卫星定位系统的不足,可以适应不同环境的定位需要。
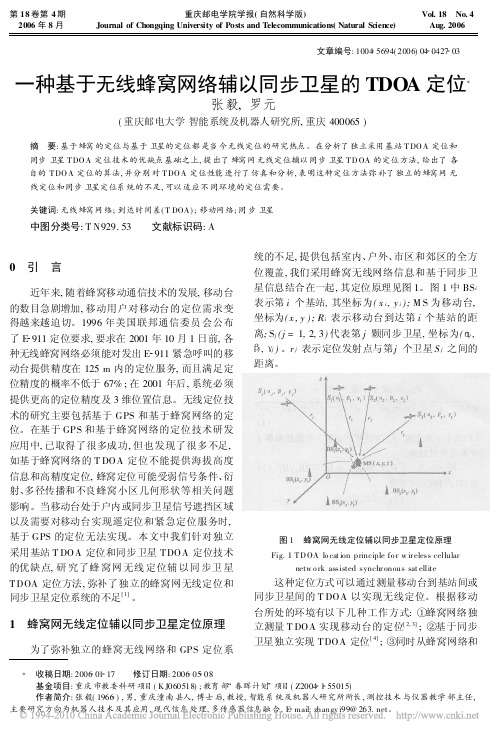
关键词:无线蜂窝网络;到达时间差(T DOA);移动网络;同步卫星中图分类号:T N929.53 文献标识码:A0 引 言近年来,随着蜂窝移动通信技术的发展,移动台的数目急剧增加,移动用户对移动台的定位需求变得越来越迫切。
1996年美国联邦通信委员会公布了E 911定位要求,要求在2001年10月1日前,各种无线蜂窝网络必须能对发出E 911紧急呼叫的移动台提供精度在125m内的定位服务,而且满足定位精度的概率不低于67%;在2001年后,系统必须提供更高的定位精度及3维位置信息。
无线定位技术的研究主要包括基于GPS和基于蜂窝网络的定位。
在基于GPS和基于蜂窝网络的定位技术研发应用中,已取得了很多成功,但也发现了很多不足,如基于蜂窝网络的T DOA定位不能提供海拔高度信息和高精度定位,蜂窝定位可能受弱信号条件、衍射、多径传播和不良蜂窝小区几何形状等相关问题影响。
当移动台处于户内或同步卫星信号遮挡区域以及需要对移动台实现遥定位和紧急定位服务时,基于GPS的定位无法实现。
![[浅析无线蜂窝通信系统中的定位技术]蜂窝定位技术的优缺点](https://img.taocdn.com/s1/m/3dd96abcad02de80d5d8407a.png)
[浅析无线蜂窝通信系统中的定位技术]蜂窝定位技术的优缺点【论文关键词】无线蜂窝通信系统角度到达定位抵达时间差定位【论文摘要】本文论述了无线蜂窝通信系统中的两种定位体制,并重点介绍基于移动网络定位技术的常用定位方法,即AOA、TOA、TDOA定位方法,同时分析各种定位方法的优缺点。
要想获取到目标的具体位置信息,一般都是采用GPS定位信息,但当目标处在高楼耸立的城市之间,GPS的部分卫星信号处于遮挡状态,此时为了获得到目标的准确信息,可以考虑采取其他的辅助定位方式。
比如说,利用伪卫星技术,该技术实质上就是指安置在地面上的地基发射站,它发射的信号与GPS的信号相类似,但该种技术需要架设额外的设施;采用DTV技术,由于大城市环境中,DTV设施资源也有限。
此时可以考虑采用无线蜂窝通信系统,该系统在城市中应用成熟,基站信号好。
因基站可以发射信号,目标可以利用基站的信号信息,确定目标的位置,即可以采用无线蜂窝通信系统来弥补GPS定位技术的不足,从而准确获取目标的位置信息。
无线蜂窝通信系统中的定位技术主要有两种体制。
一种是基于下行链路的定位技术,即基于移动台的定位技术;一种是基于上行链路的定位技术,即基于移动网络的定位技术。
基于移动台的定位技术要求移动台参与定位参数的测量以及测量值的求解计算。
基于蜂窝网络的定位技术是络根据测量数据计算出移动终端所处的位置,通常必须利用3个或3个以上蜂窝基站接收手机信号的定位参数,即到达时间、角度或强度。
1基于移动台的定位技术现已提出的基于移动台的方法主要有:基于下行链路增强观测时间差定位方法、基于下行链路空闲周期观测到达时间差方法、基于GPS作为辅助的定位技术等。
2基于移动网络的定位技术基于蜂窝网络的定位方法目前主要有:基于Cell-ID定位和基于时间提前量定位的方法、上行链路信号到达时间定位方法、上行链路信号到达时间差定位方法以及上行链路信号到达角度定位方法等。
2.1AOA角度到达(AOA,Arrival of Angle)定位方式是根据信号到达的角度,测定出运动目标的位置。
基于TDOA的高精度无线定位算法分析与实现孔维炯;丁志中;方福柱【摘要】文章根据移动应用需求,推导三维空间最小二乘(least square,LS)算法、Taylor级数展开法和查恩(Chan)算法3种经典到达时间差(time difference of arrival,TDOA)算法求解过程,通过仿真模拟分析3种算法的不同特点,确定移动定位场景下的最佳算法.为了进一步提高定位精度,采用Kalman滤波中递推估计思想,减小噪声干扰产生的误差,提升到达时间(time of arrival,TOA)测距精度,进而获得三维空间中性能优良的TDOA算法.测试试验表明,改进后的Chan算法有效且性能优良,定位误差最大为10~30 cm.【期刊名称】《合肥工业大学学报(自然科学版)》【年(卷),期】2019(042)006【总页数】7页(P756-762)【关键词】定位;到达时间差(TDOA);最小二乘;泰勒级数扩展;Chan算法;Kalman 滤波【作者】孔维炯;丁志中;方福柱【作者单位】合肥工业大学计算机与信息学院 ,安徽合肥 230601;合肥工业大学计算机与信息学院 ,安徽合肥 230601;合肥工业大学计算机与信息学院 ,安徽合肥 230601【正文语种】中文【中图分类】TN929.53目前,广泛使用的定位技术和方法主要有卫星定位、手机蜂窝网定位及Wi-Fi定位。
它们的共同特点是利用已存在的无线网实现定位,各系统中的卫星、手机基站、Wi-Fi无线路由器在定位中充当着锚节点(anchor)的角色,提供位置计算的已知点坐标,待测节点(又称“tag节点”)处于多个anchor所确定的二维平面或三维空间中,从而定位待测节点坐标,且定位精度在米级以上。
然而,在某些应用场景使用上述定位技术是不可行的。
例如,高速公路过山隧道中行驶的车辆定位场景,会发生无法接收或者难以接收卫星定位信号、手机蜂窝信号或Wi-Fi信号的情况;机器人操作的仓储系统中的定位,要求定位精度达到厘米级。
