第2章静力平衡
- 格式:ppt
- 大小:1.88 MB
- 文档页数:47
第二章杆件的静力分析复习资料一、力的概念1、力是使物体的运动状态发生变化或使物体产生变形的物体之间的相互机械作用。
2、力的三要素:、和。
当这三个要素中任何一个改变时,力对物体的作用效应就会改变。
3、力是一个既有又有的矢量。
在国际单位制中,力的单位用(牛)或(千牛)表示。
二、力的基本性质1、作用与反作用定律一个物体对另一个物体有一作用力时,另一物体对该物体必有一个反作用力。
这两个力相等、相反、作用在上,且分别作用在上。
2、二力平衡公理作用于某刚体上的两个力,使刚体保持平衡的必要和充分条件是:这两个力、,且上。
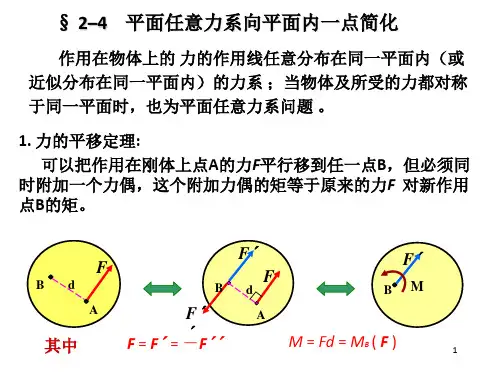
作用于刚体上的力,可以沿其移动到该刚体上的,而它对刚体的作用效果。
3、力的平行四边形法则作用在物体上同一点的两个力,其合力也作用在该点上,合力的和由这两个力为邻边所作平行四边形的确定。
4、力的分解1)工程中常将作用力分解为沿方向的分力和方向的分力。
2)在人拉车相同力的情况下,越小,拉车的效果越明显,是因为起到拉车的作用,起到减少车与地面正压力的作用。
3)当物体沿水平方向运动时,常将力分解为沿方向和方向;当物体沿斜面运动时,常将力分解为方向和方向。
三、力矩1、力对物体的作用效应,除 外,还有 。
2、在力学上用F 与d 的乘积及其转向来度量力F 使物体绕O 点转动的效应,称为力F 对O 点之矩,简称 ,以符号M0(F )表示。
O 为力矩中心,简称 ;O 点到力F 作用线的垂直距离d 称为 。
Fd F o ±=)(M3、正负号表示两种不同的转向,规定使物体产生 旋转的力矩为正值;反之为负值。
4、力矩的单位是 (牛·米)或 (千牛·米)5、提高转动效应的方法:一方面可以 ,更有效的办法是 。
6、力矩原理的应用: 、 、 等四、力偶1、力学中,把作用在同一物体上 、 、 的一对平行力称为力偶,记作(F 1,F 2),力偶中两个力的作用线间的距离d 称为,两个力所在的平面称为力偶的作用面。
物体的静力平衡物体的静力平衡是物理学中的一个重要概念,它描述了当物体处于静止状态时,所有作用在该物体上的力的合力为零的情况。
在这篇文章中,我们将会探讨物体的静力平衡的概念,以及其在现实生活中的应用。
首先,让我们来了解一下物体的静力平衡的定义。
当一个物体处于静止状态时,我们可以假设它在一个平面上,并且没有任何外力作用在该物体上。
在这种情况下,物体的静力平衡可以通过以下方式来判断:所有作用在物体上的力,包括重力、张力等,都需要达到力的平衡,也就是合力为零。
这意味着,物体上作用着的力需要相互抵消,不会导致物体发生运动。
重力是物体的重要力之一,它是以质量和重力加速度之乘积来计算的。
当物体处于静止状态时,与物体重力相等的反作用力,比如支撑力或拉力,使得物体保持着静力平衡。
例如,当我们放置一个书本在桌子上时,重力向下作用在书本上,而桌子向上施加的力则是支撑力,两者之和为零,使得书本保持在桌面上静止不动。
除了重力外,物体还可以受到其他力的作用,如张力、摩擦力等。
这些力也需要满足静力平衡的条件,即合力为零。
例如,当一个物体悬挂在两根绳子上时,这两根绳子的张力需要满足合力为零的条件,才能保持物体的静力平衡。
物体的静力平衡不仅在物理学中具有重要的理论意义,同时也在现实生活中有着广泛的应用。
其中一个应用是建筑物的结构设计。
在设计建筑物的时候,工程师需要考虑到物体的静力平衡,确保建筑物能够稳定地承受外部的力,如风力、地震等。
另一个应用是天平的使用。
天平是一种能够测量物体质量的仪器。
它的工作原理就是基于物体的静力平衡。
当物体放在天平的两个盘子上时,天平会根据物体在两个盘子上施加的力来判断物体的质量,只有当两个盘子上的力相等时,天平才能保持静止。
通过测量物体产生的力与重力之间的平衡关系,天平可以准确测量物体的质量。
除了在建筑物和天平中的应用之外,物体的静力平衡还在其他许多领域中发挥着重要作用,如桥梁设计、车辆平衡控制等。
只有通过合理地利用物体的静力平衡原理,我们才能确保物体在各种条件下保持稳定和安全。
工程力学中的静力平衡和动力平衡工程力学是应用力学原理解决工程实际问题的学科,其中静力平衡和动力平衡是基本概念。
静力平衡是指物体在静止状态下所处的力的平衡,而动力平衡则是指物体在运动状态下所处的力的平衡。
本文将就工程力学中的静力平衡和动力平衡进行探讨。
一、静力平衡静力平衡是工程力学中的一个重要概念,它是指物体处于静止状态下所受力的平衡。
在静力平衡的条件下,物体不会发生运动或旋转。
静力平衡的核心原理是力的平衡,即合力为零。
根据牛顿第一定律,当物体处于静止状态时,合外力为零。
这意味着物体所受的外力与其受到的内力相平衡。
为了满足静力平衡,必须满足以下两个条件:1. 合力为零:物体受到的所有外力的合力必须为零。
这意味着物体所受的各个力在空间中的向量和必须为零。
2. 转矩为零:物体受到的所有力对于物体某一点的合力矩必须为零。
这意味着物体所受的各个力在空间中的转矩和必须为零。
满足这两个条件,物体才能实现静力平衡。
在实际工程中,静力平衡的原理被广泛应用于桥梁、建筑物、机械设备等的设计和施工中。
二、动力平衡与静力平衡不同,动力平衡是指物体在运动状态下所受力的平衡。
在动力平衡的条件下,物体可能发生运动或旋转,但其没有加速度。
动力平衡的核心原理是力矩的平衡,即合外力矩为零。
根据牛顿第二定律,当物体处于动态平衡时,合外力矩为零。
这意味着物体所受的合外力矩与其惯性力矩相平衡。
为了满足动力平衡,必须满足以下两个条件:1. 合外力矩为零:物体受到的所有外力矩的合力必须为零。
这意味着物体所受的各个力矩在空间中的矢量和必须为零。
2. 合外力为零:物体受到的所有外力的合力必须为零。
这意味着物体所受的各个力在空间中的矢量和必须为零。
满足这两个条件,物体才能实现动力平衡。
在工程实践中,动力平衡的原理被广泛应用于机械设备、交通工具、飞行器等的设计和运行中。
三、静力平衡与动力平衡的区别1. 状态不同:静力平衡是指物体处于静止状态下的力平衡,而动力平衡是指物体处于运动状态下且没有加速度的力平衡。
静力学平衡的条件静力学平衡是物体处于力的作用下不发生平动和转动的状态。
在物体受到多个力的作用时,只有在满足一定的条件下,物体才能保持静力学平衡。
下面将详细介绍静力学平衡的条件以及其应用。
首先,我们来了解一下静力学平衡的基本概念。
在物理学中,力被定义为物体之间的相互作用,它可以使物体发生平动(直线运动)或旋转运动。
而静力学平衡是指物体在受到多个力的作用下,不发生平动或旋转运动,保持静止的状态。
要使物体处于静力学平衡,需要满足以下两个条件:1. 作用在物体上的合力为零:当物体受到多个力的作用时,合力是指所有力的矢量和。
如果作用在物体上的所有力的合力为零,即ΣF=0,那么物体将保持静止状态。
2. 作用在物体上的合力矩为零:力矩是指力绕固定点产生的转动效果。
当物体受到多个力的作用时,如果合力产生的力矩为零,即Στ=0,那么物体将不发生转动。
这两个条件是静力学平衡的基本要求,它们可以用数学方式表达为ΣF=0和Στ=0。
通过解这两个方程,我们可以得到物体处于静力学平衡时的各种力的大小和方向。
静力学平衡的条件不仅适用于简单的力学问题,也可以应用于复杂的工程和结构设计中。
例如,在建筑物和桥梁的设计中,静力学平衡的原理被广泛应用。
工程师需要通过计算各个部分受力的大小和方向,以保证结构的稳定和安全。
此外,静力学平衡的原理还可以用于解释一些日常生活中的现象。
例如,我们常见的平衡木就是基于静力学平衡的原理设计的。
当人站在平衡木上时,平衡木的两端受到相等大小的力,并且这些力的合力和合力矩均为零,从而使平衡木保持平衡。
同样的原理也适用于天平、摇摆椅等物体。
静力学平衡的条件不仅在物理学中有重要应用,在工程学和生活中也起着至关重要的作用。
它帮助我们理解物体静止和平衡的原理,并能够指导我们设计和构建稳定的结构。
总结起来,要使物体处于静力学平衡,必须满足作用在物体上的合力为零和合力矩为零的条件。
这些条件是静力学平衡的基本要求,我们可以通过解决这些条件得到物体受力的大小和方向。
静力学平衡和力的平衡条件静力学平衡是物体处于静止状态或匀速直线运动状态时,力的合力和力矩的平衡状态。
在力的平衡条件下,物体不受任何净外力作用或任何净外力矩作用下保持静止或运动。
本文将从静力学平衡和力的平衡条件两个方面进行探讨。
静力学平衡在静力学平衡中,力的合力及力矩总和为零,即物体所受的合外力为零,力矩和力臂的乘积之和也为零。
这是因为物体在静止状态或匀速直线运动状态下,力的合力和合外力矩必须为零,保持力的平衡。
力的平衡条件力的平衡需要满足两个条件:合力为零,合力矩为零。
1. 合力为零合力为零意味着物体受到的合外力为零。
当物体受到的合外力为零时,物体将保持静止或匀速直线运动状态。
如果一个物体所受的力不平衡,物体将产生加速度并改变其状态。
以一个简单的示例来说明合力为零的情况。
考虑一个放置在桌子上的杯子,桌子对杯子的支持力与地球对杯子的引力相等且反向,这就是合力为零的力的平衡条件。
2. 合力矩为零合力矩为零可以理解为物体所受的力矩总和为零。
力矩是力相对于某个固定点的转动效果,它与力的大小、作用点与转动中心之间的距离有关。
对于合力矩为零的情况,可以考虑一个平衡杆的例子。
当一个杆平衡在一个固定点上时,杆两侧的合力矩必须相等。
例如,考虑一个人站在一端固定的杆上,如果人向左移动,人产生的力矩将超过固定点产生的力矩,从而使杆失去平衡。
总结静力学平衡和力的平衡条件是物体处于静止状态或匀速直线运动状态时的基本原理。
合力为零和合力矩为零是力的平衡条件,它们同时满足时物体处于力的平衡状态。
理解和应用静力学平衡和力的平衡条件对于解决物体静态平衡问题非常重要。
通过正确地分析和计算力的合力和合力矩,我们可以确定物体是否处于平衡状态,并找到具体的解决方案。
(以上内容仅供参考,具体根据文章要求进行调整。
)。
第二章静定结构的受力分析第一节静定结构的特性一、静定结构的性质( )( )2-1-7 图2-1-7所示结构 B 。
( ) 2-1-8 图2-1-8示结构中|(二)选择题2-2-1 A .C .有内力、无位移、无应变; D .无内力、无位移、有应变。
2-2-2 对于一个静定结构,下列说法错误的有哪些:( ) A .只有当荷载作用于结构时,才会产生内力; B .环境温度的变化,不会产生内力;C .杆件截面尺寸及截面形状的任意改变均不会引起内力改变;D .制造误差与支座沉降可能使得结构形状发生变化,因此可能产生内力。
2-2-3 静定结构由于支座沉降(位移)或制造误差,结构内部将:( ) A .有内力、有位移; B .无内力、有位移; C .有内力、无位移; D.无内力、无位移。
2-2-4 静定结构由于支座沉降(位移),结构内部将:( ) A .有应变、有位移; B .无应变、有位移; C .有应变、无位移; (D)无应变、无位移。
(三)填空题2-3-12-3-2 。
2-3-3 已知AB 梁的值为__________ kN ·m2-3-7 比较图2-3-3a、b三、习题答案2-1-1 O2-1-2 X2-1-3 O;2-1-4 O。
提示:ACB为附属部分,根据性质7。
2-1-5 X。
提示:静定结构在温度变化时不产生内力。
2-1-7 X。
提示:附属部分上无荷载,因此附属部分无内力和反力。
2-1-8 O。
提示:静定结构内力图与杆件刚度无关,因此该结构为对称结构受反对称荷载。
2-2-1 B;2-2-2 D;2-2-3 B;2-2-4 B;2-3-1 支座移动,位移,支座移动;2-3-2 静力平衡条件;2-3-3 20。
提示:静定结构内力与刚度无关,因此无论刚度怎样变化,并不影响内力图。
2-3-6 相同,不同。
第二节多跨静定梁和刚架一、基本概念1、分段叠加法作弯矩图(1)选定外力的不连续点(如集中力作用点、集中力偶作用点、分布荷载的起点和终点等)为控制截面,求出控制截面的弯矩值。