第5章 线性系统的频率响应分析法
- 格式:ppt
- 大小:2.06 MB
- 文档页数:74
第五章 频域响应法5-1 频率特性一. 频率特性的基本概念1. 所谓频率特性,即在零初始条件下,系统输入在正弦信号的控制下,其稳态输出C(t) 的被控制量信号的幅值A(ω)和相角ψ(ω)随r(t)信号的角频率ω变化的规律,记为G(j ω)。
G(j ω)=G(S)| s=j ω C(j ω) C(s)G(j ω)== R(j ω) R(s)| s=j ωb 0(j ω) m +b 1(j ω) 1+m +……+b 1-m (j ω)+b m G(j ω)=( j ω) n +a 1(j ω) 1-n +……a 1-n (j ω)+a n2、G(j ω)的数模表达式有两种标准式: (1)Nyquist 标准式:G(j ω)=︱G(j ω)︱e)(jw G j ∠=u(ω)+jv(ω)其中A(j ω)= ︱G(j ω)︱称为幅频特性,是ω的偶函数。
ψ(ω)= ∠G(j ω) 称为相频特性,是ω的奇函数。
u(ω)=Re [G(j ω)]为实部; v(ω)=Im [G(j ω)]为虚部。
(2)Bode 表达式:L (ω)=20lg [A(j ω) ] 称为对数幅频,ψ(ω)= ∠G(j ω) 称为对数相频。
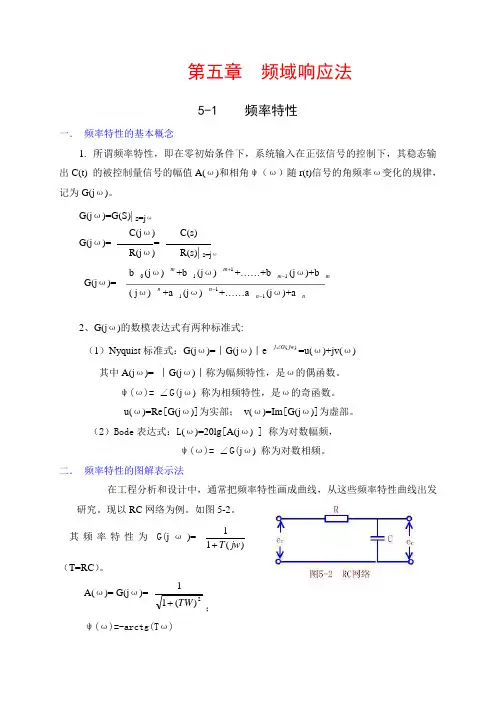
二. 频率特性的图解表示法在工程分析和设计中,通常把频率特性画成曲线,从这些频率特性曲线出发研究。
现以RC 网络为例。
如图5-2。
其频率特性为G(j ω)=)(11jw T +(T=RC )。
A(ω)= G(j ω)=2)(11TW +;ψ(ω)=-arctg(T ω)1.极坐标图----Nyquist图当ω=0→∞变化时,A(ω)和φ(ω)随ω而变,以A(ω)作幅值,φ(ω)作相角的端点在s平面上形成的轨迹,称Nyquist曲线(幅相频率特性曲线)简称幅相曲线即Nyquist图,是频率响应法中常用的一种曲线。
2、对数坐标图----Bode图对数频率特性曲线又称Bode曲线,包括对数幅频和对数相频两条曲线。
实验名称:线性系统的频率响应分析系专业班姓名学号授课老师预定时间实验时间实验台号一、目的要求1.掌握波特图的绘制方法及由波特图来确定系统开环传函。
2.掌握实验方法测量系统的波特图。
二、原理简述1.频率特性当输入正弦信号时,线性系统的稳态响应具有随频率( ω由0 变至∞) 而变化的特性。
频率响应法的基本思想是:尽管控制系统的输入信号不是正弦函数,而是其它形式的周期函数或非周期函数,但是,实际上的周期信号,都能满足狄利克莱条件,可以用富氏级数展开为各种谐波分量;而非周期信号也可以使用富氏积分表示为连续的频谱函数。
因此,根据控制系统对正弦输入信号的响应,可推算出系统在任意周期信号或非周期信号作用下的运动情况。
2.线性系统的频率特性系统的正弦稳态响应具有和正弦输入信号的幅值比和相位差随角频率(ω由0 变到∞) 变化的特性。
而幅值比和相位差恰好是函数的模和幅角。
所以只要把系统的传递函数,令,即可得到。
我们把称为系统的频率特性或频率传递函数。
当由0 到∞变化时,随频率ω的变化特性成为幅频特性,随频率的变化特性称为相频特性。
幅频特性和相频特性结合在一起时称为频率特性。
3.频率特性的表达式(1) 对数频率特性:又称波特图,它包括对数幅频和对数相频两条曲线,是频率响应法中广泛使用的一组曲线。
这两组曲线连同它们的坐标组成了对数坐标图。
对数频率特性图的优点:①它把各串联环节幅值的乘除化为加减运算,简化了开环频率特性的计算与作图。
②利用渐近直线来绘制近似的对数幅频特性曲线,而且对数相频特性曲线具有奇对称于转折频率点的性质,这些可使作图大为简化。
③通过对数的表达式,可以在一张图上既能绘制出频率特性的中、高频率特性,又能清晰地画出其低频特性。
(2) 极坐标图(或称为奈奎斯特图)(3) 对数幅相图(或称为尼柯尔斯图)本次实验中,采用对数频率特性图来进行频域响应的分析研究。
实验中提供了两种实验测试方法:直接测量和间接测量。
直接频率特性的测量用来直接测量对象的输出频率特性,适用于时域响应曲线收敛的对象(如:惯性环节)。
第5章线性系统的频域分析频域分析法是一种图解分析方法,其特点是可以根据系统的开环频率特性去判断闭环控制系统的性能,并能较方便地分析系统中的参量对系统暂态响应的影响,从而进一步指出改善系统性能的途径。
一、频率特性1.基本概念(1)定义频率特性是将传递函数中的s以j代替。
当电路中的输入为正弦信号时,其输出的稳态响应(频率响应)也是一个正弦信号,其频率和输入信号的频率相同,但幅值和相角发生了变化,其变化取决于。
(2)分类①幅频特性:输出信号的幅值与输入信号幅值之比;②相频特性:输出信号的相角与输入信号相角之差。
2.频率特性的图形表示(1)极坐标图①定义极坐标图是指在平面上,以横坐标表示,纵坐标表示,采用极坐标系的频率特性图,又叫做奈奎斯特图。
②表达式可以分为实部和虚部,即(2)伯德图①定义伯德(Bode)图是指将频率特性化成对数坐标图的形式,又叫做对数坐标图。
②表达式对数幅值表达式为,单位为dB。
③优点利用对数运算可以将幅值的乘除运算化为加减运算,并且可以用简便的方法绘制近似的对数幅频特性,从而使绘制过程大为简化。
3.线性定常系统的频率特性(1)定义频率特性是指,它反映了正弦输入信号作用下,系统稳态响应与输入正弦信号之间的关系。
(2)分类①幅频特性:系统稳态输出信号与输入正弦信号的赋值比;②相频特性:系统稳态输出信号对输入正弦信号的相移。
二、典型环节的频率特性1.比例环节(1)比例环节的频率特性为其特点是输出能够无滞后、无失真地复现输入信号。
(2)比例环节的对数幅频特性和相频特性为(3)比例环节的伯德图如图所示(K>1的情况)。
2.惯性环节(1)惯性环节的频率特性为(2)惯性环节的对数幅频特性和相频特性为式中,。
惯性环节的幅频特性随着角频率的增加而衰减,呈低通滤波特性。
而相频特性呈滞后特性。
3.积分环节(1)积分环节的频率特性为(2)积分环节的对数幅频特性和相频特性为它的幅频特性与角频率成反比,而相频特性恒为,即。
146第5章 线性系统的频域分析与校正时域分析法具有直观、准确的优点。
如果描述系统的微分方程是一阶或二阶的,求解后可利用时域指标直接评估系统的性能。
然而实际系统往往都是高阶的,要建立和求解高阶系统的微分方程比较困难。
而且,按照给定的时域指标设计高阶系统也不是容易实现事。
本章介绍的频域分析法,可以弥补时域分析法的不足。
频域法是基于频率特性或频率响应对系统进行分析和设计的一种图解方法,故又称为频率响应法。
频率法的优点较多。
首先,只要求出系统的开环频率特性,就可以判断闭环系统是否稳定。
其次,由系统的频率特性所确定的频域指标与系统的时域指标之间存在着一定的对应关系,而系统的频率特性又很容易和它的结构、参数联系起来。
因而可以根据频率特性曲线的形状去选择系统的结构和参数,使之满足时域指标的要求。
此外,频率特性不但可由微分方程或传递函数求得,而且还可以用实验方法求得。
这对于某些难以用机理分析方法建立微分方程或传递函数的元件(或系统)来说,具有重要的意义。
因此,频率法得到了广泛的应用,它也是经典控制理论中的重点内容。
5.1 频率特性的基本概念5.1.1 频率特性的定义为了说明什么是频率特性,先看一个R -C 电路,如图5-1所示。
设电路的输入、输出电压分别为()r u t 和()c u t ,电路的传递函数为 ()1()()1c r U s G s U s Ts ==+ 式中,RC T =为电路的时间常数。
若给电路输人一个振幅为X 、频率为ω的正弦信号 即: ()sin r u t X t ω= (5-1) 当初始条件为0时,输出电压的拉氏变换为图5-1 R C -电路1472211()()11c r X U s U s Ts Ts s ωω==⋅+++ 对上式取拉氏反变换,得出输出时域解为()22()arctan 1t T c XT u t e t T T ωωωω-=+-+ 上式右端第一项是瞬态分量,第二项是稳态分量。