简谐振动的动力学特征.
- 格式:ppt
- 大小:3.04 MB
- 文档页数:59

一、简谐运动特征
1、动力学特征:,注意k不等同于弹簧的劲度系数,是由振动装置本身决定的常数;动力学特征也是判断某机械运动是否为简谐运动的依据。
2、运动学特征:,此式表明加速度也跟位移大小成正比,并总指向平衡位置。
由此可见,简谐运动是一变加速运动,且加速度和速度都在做周期性的变化。
3、能量特征:机械能守恒,注意振动物体通过平衡位置时势能为零的说法不够确切,应说成此位置势能最小。
4、对称特征:关于平衡位置对称的两点等物理量的大小相等,此外还体现在过程量上的相等,如从某点到平衡位置的时间和从平衡位置到与该点关于平衡位置对称点的时间相同等等。
二、简谐运动的分析方法
1、判断振动是简谐运动的思路:正确受力分析;找出平衡位置
();设物体偏离平衡位置位移为x,找到,即可得证。
2、判断简谐运动的变化的思路:
例、如图所示,一个质点在平衡位置O点附近做简谐运动,若从O点开始计时,经过3s质点第一次经过M点,再继续运动,又经过2s它第二次经过M点;则该质点第三次经过M点所需的时间是_______________。
解析:设图中a、b两点为质点振动过程中的最大位移处,若开始质点从O
点向右运动,O→M历时3s,M→b→M历时2s,则=4s,T=16s,质点第三次经过M点所需时间
t=16s-2s=14s。
若开始计时时刻质点从O点向左运动,O→a→O→M历时3s。
M→b→M历时2s,则,质点第三次经过M点所需时
间
本题的求解关键在于灵活运用简谐运动中的对称性,同时还要注意振动方向的不确定性造成此题的多解;除此之外,对简谐运动过程中各个物理量在四个T/4时段内和五个特殊时刻的情况分析也要清楚。
简谐振动与谐振子的动力学特性简谐振动是一种物理现象,描述了一个物体在没有外力作用下,以相对平衡位置为中心,围绕着这个平衡位置做往复运动的情况。
谐振子是指能够进行简谐振动的物体或系统。
简谐振动的动力学特性有很多值得探讨和讨论的方面,其中包括振动的周期、频率、振幅和相位。
首先,简谐振动的周期是指一个完整的振动往复运动所需要的时间。
对于一个谐振子来说,其周期由振子的质量和弹簧的劲度系数决定。
根据牛顿第二定律和胡克定律,可以通过以下公式计算谐振子的周期:T = 2π√(m/k)其中,T表示周期,m表示质量,k表示弹簧的劲度系数。
从公式可以看出,质量越大,周期越长;劲度系数越大,周期越短。
其次,简谐振动的频率与周期有着密切的关系。
频率是指单位时间内振动的次数,用赫兹(Hz)来表示。
频率可以通过周期的倒数来计算,即f = 1/T。
从公式可以看出,频率是周期的倒数,所以周期越短,频率越高。
振幅是指简谐振动的最大位移,即物体运动离开平衡位置的最大距离。
对于谐振子来说,振幅是通过外力施加的能量来决定的。
振幅越大,说明被施加在谐振子上的力越大,振动幅度也就越大。
最后,相位是指简谐振动的起始位置。
相位可以通过计算振动的位移与时间的关系来确定。
相位是一个角度或相对于某一点的偏移量。
相位的变化可以告诉我们在一个振动周期内,振动物体的位置变化情况。
除了上述动力学特性,简谐振动的能量也是一个非常重要的方面。
在谐振子运动过程中,弹簧对物体施加的力会不断改变物体的动能和势能。
当物体通过平衡位置时,动能最大,而当物体离开平衡位置最远时,势能最大。
这种动能和势能的不断转换使得谐振子的能量保持不变。
简谐振动是自然界中广泛存在的一种运动形式,许多物理学原理和现象都与谐振相关。
例如,在机械系统中,钟摆和弹簧振子都是简谐振动的典型例子。
在电磁系统中,射频电路和天线振动也可以用简谐振动的概念来描述。
总之,简谐振动是一种极为重要和普遍的物理现象。

动力学中的简谐振动与振幅频率关系在物理学中,简谐振动是指一个物体围绕平衡位置做往复运动的现象。
它可以被广泛地应用于机械、电学、光学等领域,并且对于理解动力学和波动现象非常重要。
在研究简谐振动时,我们往往会关注振动的振幅和频率之间的关系。
一. 简谐振动的定义与特征简谐振动是指一个物体围绕其平衡位置进行的周期性往复运动。
它的特点包括以下几个方面:1. 平衡位置:简谐振动的平衡位置是物体在不受外力作用时所处的位置,也是振动的中心点。
2. 振幅:振幅是指物体离开平衡位置的最大位移,通常用字母A表示。
3. 周期:简谐振动的周期是指物体完成一次完整振动所需要的时间,通常用字母T表示。
4. 频率:频率是指单位时间内振动的次数,通常用字母f表示。
二. 简谐振动的振幅频率关系简谐振动的振幅和频率之间存在着一定的关系,这种关系可以通过振动的数学表示来推导。
1. 数学表示我们可以通过物体的位置随时间的变化来描述简谐振动。
设物体的运动方程为x(t),其中x表示位置,t表示时间。
根据数学分析,可以得到以下表示:x(t) = A * cos(ωt + φ)在上述公式中,A表示振幅,ω表示角频率,t表示时间,φ表示初始相位。
2. 振幅与角频率的关系通过上述公式可以看出,振幅A对应于cos函数的最大值,即A是振动的最大位移。
而角频率ω则决定了振动的快慢程度,它与振动的周期T之间存在如下关系:ω = 2π / T由此可见,振幅与周期的倒数成正比,振幅越大,周期越短。
3. 频率与角频率的关系频率f是指单位时间内振动的次数,它与角频率ω之间存在如下关系:f = 1 / T = ω / 2π也就是说,频率和角频率之间是相等的。
频率能够直接反映振动的快慢程度,频率越大,振动越快。
综上所述,简谐振动的振幅和频率具有一定的关系:振幅与周期的倒数成正比,而频率与角频率相等。
我们可以通过实验数据或者数学推导来验证这种关系,并且可以利用这种关系来解决相关的物理问题。

机械振动
需要特别注意的要点:
一.振动及描述振动的物理量:
1.位移x:由平衡位置指向振动质点所在位置的有向线段,是矢量,其最大值等于振幅。
无论质点从什么位置开始振动,其位移总是以平衡位置为初位置。
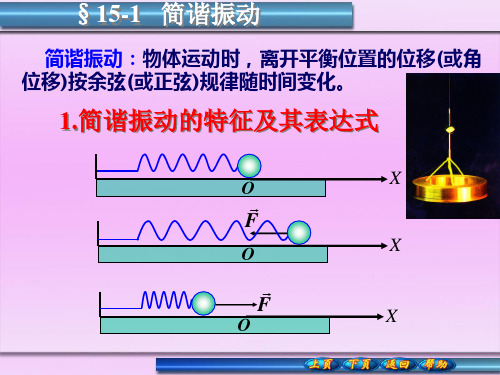
二.简谐振动的特征:
1.动力学特征:F=-kx
2.运动学特征:x、v、a均按正弦或者余弦规律发生周期性变化(v和a变化趋势相反)
3.能量特征:系统的机械能守恒,振幅A不变
三.简谐振动的两个典型模型-------弹簧振子与单摆
弹簧振子是一种忽略摩擦、弹簧质量的理想化的模型。
对弹簧振子来说,弹簧振子的劲度系数、振子的质量确定了,其振子的周期和频率也就确定了。
无论是在地球上、其他星球上,或者是在完全失重的人造卫星中,T和f均不变,完全由系统本身的性质决定。


课程设计画布一、教学目标本课程的教学目标是让学生掌握第三章:生物的遗传与变异的核心概念和原理。
知识目标包括:•能够描述基因的概念和其在遗传中的作用。
•能够解释DNA的结构和复制过程。
•能够阐述孟德尔遗传定律及其在现代遗传学中的应用。
•能够描述基因突变和其对生物体影响。
技能目标则要求学生:•能够运用遗传学知识解决简单的实际问题。
•能够使用实验数据来验证遗传学假说。
•能够通过绘图或模型制作来解释遗传学过程。
情感态度价值观目标旨在培养学生的:•对生命科学探究的兴趣和好奇心。
•尊重科学探究过程和结果的态度。
•认识生物技术的意义和潜在价值。
二、教学内容本章节的教学内容将依据《高中生物》教材的第三章,详细安排如下:1.基因与遗传:介绍基因的定义,解释基因如何控制生物的特性。
2.DNA的结构与复制:阐述DNA的双螺旋结构,演示DNA复制的过程。
3.孟德尔遗传定律:详细讲解孟德尔的两大遗传定律,并通过实例分析其应用。
4.基因突变:探讨基因突变的类型、原因及对生物体的影响。
5.遗传学实验技术:介绍常见的遗传学实验技术,如杂交实验和基因工程。
三、教学方法为达成上述教学目标,将采用以下教学方法:•讲授法:用于讲解基础理论和概念。
•讨论法:鼓励学生就遗传学案例进行讨论,促进深入理解。
•实验法:指导学生完成遗传学相关实验,增强实践操作能力。
•案例分析法:分析真实或模拟的遗传学案例,培养学生解决问题的能力。
四、教学资源教学资源的准备将包括:•教材《高中生物》及相关辅助阅读材料。
•多媒体教学课件,包括视频和动画资料。
•实验室设备,如显微镜、DNA模型等,用于实验教学。
•在线资源库,提供额外的学习资料和互动平台。
以上课程设计画布内容围绕教学目标、教学内容、教学方法和教学资源展开,旨在为学生提供一个清晰、有序、互动和富有启发性的学习环境。
五、教学评估为全面评估学生对第三章:生物的遗传与变异内容的掌握情况,将采用以下评估方式:1.平时表现:通过课堂提问、讨论参与度等评估学生的理解力和积极性。


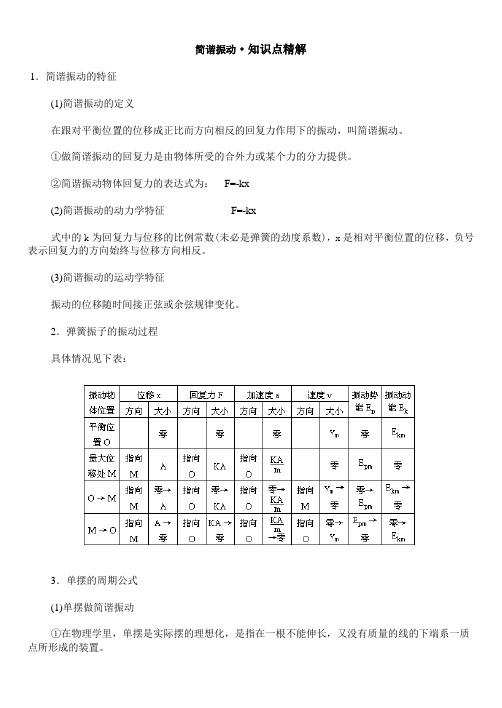
简谐振动·知识点精解1.简谐振动的特征(1)简谐振动的定义在跟对平衡位置的位移成正比而方向相反的回复力作用下的振动,叫简谐振动。
①做简谐振动的回复力是由物体所受的合外力或某个力的分力提供。
②简谐振动物体回复力的表达式为:F=-kx(2)简谐振动的动力学特征F=-kx式中的k为回复力与位移的比例常数(未必是弹簧的劲度系数),x是相对平衡位置的位移,负号表示回复力的方向始终与位移方向相反。
(3)简谐振动的运动学特征振动的位移随时间接正弦或余弦规律变化。
2.弹簧振子的振动过程具体情况见下表:3.单摆的周期公式(1)单摆做简谐振动①在物理学里,单摆是实际摆的理想化,是指在一根不能伸长,又没有质量的线的下端系一质点所形成的装置。
②单摆做简谐振动的条件:振动过程中的最大编角不超过5°。
③单摆做简谐振动的回复力是重力mg沿圆弧切线的分力F=mgsinα提供(不要误认为是摆球所受的合外力)。
当α很小时(5°以下),圆弧可以近似地看成直线,分力F可以近似地看作沿这条直线作用,OP就是摆锤偏离平衡位置的位移。
如图7-3所示。
设摆长是l,因为sin式中负号表示力F跟位移x的方向相反。
由于m、g、l都有一定的数值,mg/l可以用一个常数k来代替,所以上式可以写成F=-kx可见,在摆角很小情况下,单摆振动时回复力跟位移成正比而方向相反,是简谐振动。
(2)单摆的周期公式①在摆角很小情况下,单摆的周期跟摆长的平方根成正比,跟重力加速度的平方根成反比,而跟摆锤的质量和振幅无关。
②单摆周期的表达式③上式只适于小摆角(<5°)的情况。
根据周期公式算出的T值与实际测定值间的误差,随摆角增大而增大。
摆角为7°时,误差为0.1%;15°时,0.5%;23°时,1%。
单摆的最大摆角应小于5°。
④单摆的周期在振幅较小时,与单摆的振幅无关,单摆的这种性质叫单摆的等时性,是伽利略首先发现的。

大学物理振动和波动 知识点总结1.简谐振动的基本特征(1)简谐振动的运动学方程: cos()x A t ϖϕ=+(2)简谐振动的动力学特征: F kx =-r r 或 2220d x x d tϖ+= (3)能量特征: 222111222k p E E E mv kx KA =+=+=, k p E E = (4)旋转矢量表示: 做逆时针匀速转动的旋转矢量A r 在x 轴上的投影点的运动可用来表示简谐振动。
旋转矢量的长度A r 等于振动的振幅,旋转矢量的角速度等于谐振动的角频率,旋转矢量在0t =时刻与坐标轴x 的夹角为谐振动的初相。
2.描述简谐振动的三个基本量(1)简谐振动的相位:t ωϕ+,它决定了t 时刻简谐振动的状态;其中:00arctan(/)v x ϕω=-(2)简谐振动的振幅:A ,它取决于振动的能量。
其中:A =(3)简谐振动的角频率:ω,它取决于振动系统本身的性质。
3.简谐振动的合成(1)两个同方向同频率简谐振动的合成:合振动的振幅:A =合振幅最大: 212,0,1,2....k k ϕϕπ-==;合振幅最小:21(21),0,1,2....k k ϕϕπ-=+=(2)不同频率同方向简谐振动的合成:当两个分振动的频率都很大,而两个频率差很小时,产生拍现象,拍频为21ννν∆=-;合振动不再是谐振动,其振动方程为21210(2cos 2)cos 222x A t t ννννππ-+=(3)相互垂直的两个简谐振动的合成:若两个分振动的频率相同,则合成运动的轨迹一般为椭圆;若两个分振动的频率为简单的整数比,则合成运动的轨迹为李萨如图形。
(4)与振动的合成相对应,有振动的分解。
4.阻尼振动与受迫振动、共振:阻尼振动: 220220d x dx x dt dt βϖ++=;受迫振动 220022cos d x dx x f t dt dtβϖϖ++= 共振: 当驱动力的频率为某一特定值时,受迫振动的振幅将达到极大值.5.波的描述(1)机械波产生条件:波源和弹性介质(2)描述机械波的物理量:波长λ、周期T (或频率ν)和波速u ,三者之间关系为:uT λ= u λν=(3)平面简谐波的数学描述:(,)cos[()]xy x t A t uωϕ=±+; 2(,)cos()x y x t A t πωϕλ=±+;(,)cos 2()t x y x t A T πϕλ=±+ 其中,x 前面的±号由波的传播方向决定,波沿x 轴的正(负)向传播,取负(正)号。


第十五章振动学基础§15-1简谐振动【基本内容】一、简谐振动的动力学描述1、谐振动的受力特征谐振动的动力学定义:振动系统在与位移大小成正比,而方向相反的回复力作用下的运动称为简谐振动。
kxf-=, k为比例系数。
2、简谐振动的微分方程222=+xdtxdωmk=ω3、简谐振动的判据判据一kxf-=动力学判据判据二运动学判据判据三)cos(φω+=tAx运动方程4、简谐振动实例单摆小角度摆动、复摆、扭摆二、简谐振动的运动学描述1、谐振动的数学表达式——运动方程谐振动的运动学定义:位移按余弦规律移随时间变化的运动是谐振动。
)cos(φω+=tAx)cos()sin(2φωωφωω+-=+-=tAatAv2、简谐振动的三个特征量角频率、频率、周期——由振动系统的性质决定。
角频率:mk=ω周期:ωπ2=T频率:T1=ν振幅A ——表示振动物体离开平衡位置的最大距离。
振幅A 和初相ϕ由初始条件决定:⎪⎪⎩⎪⎪⎨⎧-=+=-)(0012202x v tg v x A ωϕω 度ω(1(2(3(4123、谐振动的机械能:2222121ωmA kA E E E p K ==+=弹簧振子的动能和势能按正弦或余弦的平方随时间作周期性变化,其周期为谐振周期的一半;当动能最大时,势能最小;当动能最小时,势能最大;但机械能保持恒定不变。
【典型例题】【例15-1】半径为R 的木球静止浮于水面上时,其体积的一半浸于水中,求: (1)木球振动的微分方程;22222)31(dtxd m g R x x R =--ρπ平衡位置时:ρπ33421R m ⋅=,故 0)31(232222=-+Rx x R g dt x d 此即木球的运动微分方程。
当R x <<时,0322→R x02322=+x R gdtx d 木球作简谐振动g R T R g 3222,23πωπω===【例15-2】 弹簧下挂g m 1000=的法码时,弹簧伸长cm 8。
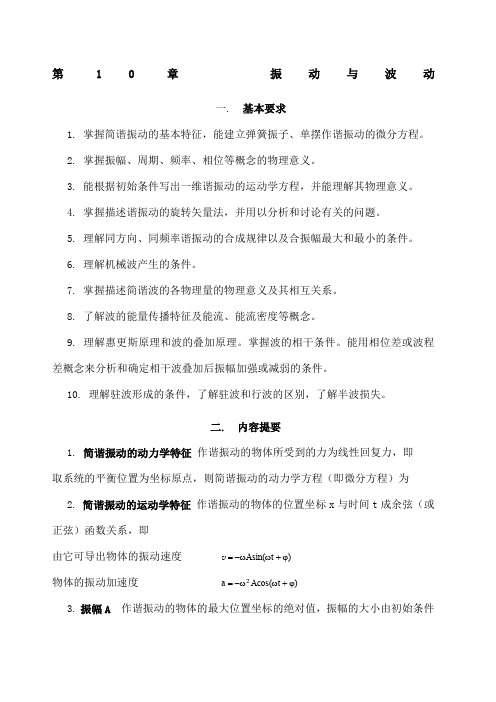
第10章振动与波动一.基本要求1. 掌握简谐振动的基本特征,能建立弹簧振子、单摆作谐振动的微分方程。
2. 掌握振幅、周期、频率、相位等概念的物理意义。
3. 能根据初始条件写出一维谐振动的运动学方程,并能理解其物理意义。
4. 掌握描述谐振动的旋转矢量法,并用以分析和讨论有关的问题。
5. 理解同方向、同频率谐振动的合成规律以及合振幅最大和最小的条件。
6. 理解机械波产生的条件。
7. 掌握描述简谐波的各物理量的物理意义及其相互关系。
8. 了解波的能量传播特征及能流、能流密度等概念。
9. 理解惠更斯原理和波的叠加原理。
掌握波的相干条件。
能用相位差或波程差概念来分析和确定相干波叠加后振幅加强或减弱的条件。
10. 理解驻波形成的条件,了解驻波和行波的区别,了解半波损失。
二. 内容提要1. 简谐振动的动力学特征作谐振动的物体所受到的力为线性回复力,即取系统的平衡位置为坐标原点,则简谐振动的动力学方程(即微分方程)为2. 简谐振动的运动学特征作谐振动的物体的位置坐标x与时间t成余弦(或正弦)函数关系,即由它可导出物体的振动速度)=tAv-ω+ωsin(ϕ物体的振动加速度)=tAa2cos(ϕ-+ωω3. 振幅A 作谐振动的物体的最大位置坐标的绝对值,振幅的大小由初始条件确定,即4. 周期与频率 作谐振动的物体完成一次全振动所需的时间T 称为周期,单位时间内完成的振动次数γ称为频率。
周期与频率互为倒数,即ν=1T 或 T1=ν5. 角频率(也称圆频率)ω 作谐振动的物体在2π秒内完成振动的次数,它与周期、频率的关系为 ωπ=2T 或 πν=ω26. 相位和初相 谐振动方程中(ϕ+ωt )项称为相位,它决定着作谐振动的物体的状态。
t=0时的相位称为初相,它由谐振动的初始条件决定,即应该注意,由此式算得的ϕ在0~2π范围内有两个可能取值,须根据t=0时刻的速度方向进行合理取舍。
7. 旋转矢量法 作逆时针匀速率转动的矢量,其长度等于谐振动的振幅A ,其角速度等于谐振动的角频率ω,且t=0时,它与x 轴的夹角为谐振动的初相ϕ,t=t时刻它与x 轴的夹角为谐振动的相位ϕω+t 。
简谐振动的特点和动力学描述简谐振动是物体在恢复力作用下沿着某个轴线上做往复振动的一种特殊运动形式。
它具有以下几个特点:1. 平衡位置稳定:简谐振动的平衡位置是物体的稳定位置,当物体偏离平衡位置时,会受到一个恢复力的作用,使得物体趋向于返回平衡位置。
2. 振幅固定:简谐振动的振幅是一个固定值,表示物体在振动过程中离开平衡位置的最大距离。
3. 频率恒定:简谐振动的频率与振动系统本身的性质有关,而与振幅无关。
频率是指单位时间内振动的完整周期数,单位为赫兹(Hz)。
4. 正弦函数描述:简谐振动的运动可用正弦函数来描述。
物体在简谐振动过程中,其位置、速度和加速度随时间的变化都可以用正弦函数表示。
根据简谐振动的特点,在动力学上可以进行如下的描述:1. 动力学方程:对于简谐振动,其动力学方程可以由胡克定律得到。
胡克定律指出,弹性力与物体偏离平衡位置的距离成正比,即恢复力F 与位移x的关系为F = -kx,其中k为弹性系数。
2. 牛顿第二定律:根据牛顿第二定律,物体的加速度与作用力成正比,与物体的质量成反比。
对于简谐振动,可以将牛顿第二定律应用于沿轴线的振动,并根据动力学方程得到加速度与位移之间的关系。
3. 振动的能量:在简谐振动中,物体的能量在势能和动能之间不断转换。
当物体通过平衡位置时,其动能最大,而势能最小;当物体运动到最大位移时,其势能最大,而动能最小。
总能量保持不变。
4. 平衡位置的稳定性:简谐振动的平衡位置是稳定的,当物体偏离平衡位置时,会受到恢复力使其回到平衡位置。
这种稳定性是由弹簧的弹性恢复力所决定的。
综上所述,简谐振动具有稳定平衡位置、固定振幅、恒定频率等特点,并可以通过动力学方程和能量转换进行描述和分析。
研究简谐振动有助于理解振动现象的基本规律,对于很多领域如机械、电子、光学等都有重要的应用价值。
