(整理)年河北省教育厅自然科学类青年项目.
- 格式:doc
- 大小:417.00 KB
- 文档页数:7

河北省科学技术厅关于公布2024年度河北省自然科学
基金项目初评结果的通知
文章属性
•【制定机关】河北省科学技术厅
•【公布日期】2024.04.23
•【字号】
•【施行日期】2024.04.23
•【效力等级】地方规范性文件
•【时效性】现行有效
•【主题分类】科学技术综合规定
正文
河北省科学技术厅关于公布2024年度河北省自然科学基金项
目初评结果的通知
有关单位:
河北省自然科学基金委员会办公室依照《河北省省级科技计划项目管理办法》《河北省自然科学基金管理办法》和《2024年度河北省省级科技计划基础研究(自然科学基金)项目申报指南》有关规定,对申报项目完成了初评,现就公布初评结果有关事项说明如下:
1.项目申报人可登录河北省科技计划项目综合服务平台
(https://),登录成功后在“申报项目管理-项目评审动态”栏查看具体审查意见。
2.申报人如对初评结果有异议,可向省自然科学基金委员会办公室提出复审申请,有关要求参见《河北省自然科学基金项目初评复审有关规定》(附件1)。
3.提出复审的申报人,请填写《河北省自然科学基金申报项目初评复审申请表》(附件2),申请表经依托单位审核属实后,加盖依托单位公章扫描后发送至
邮箱:*************。
复审申请受理日期为:2024年4月23日至2024年4月27日17:30(以邮件日期为准)。
4.初评不通过项目不再进入下一阶段评审。
联系电话:*************
附件:1.河北省自然科学基金项目初评复审有关规定
2.河北省自然科学基金申报项目初评复审申请表
河北省科学技术厅
2024年4月23日。
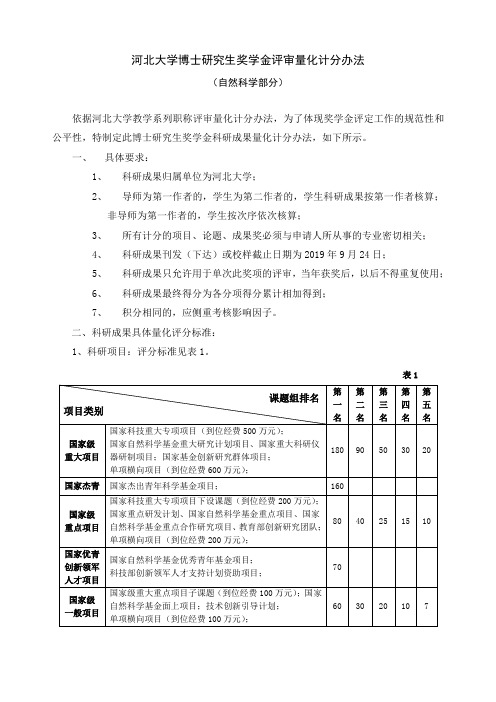
河北大学博士研究生奖学金评审量化计分办法
(自然科学部分)
依据河北大学教学系列职称评审量化计分办法,为了体现奖学金评定工作的规范性和公平性,特制定此博士研究生奖学金科研成果量化计分办法,如下所示。
一、具体要求:
1、科研成果归属单位为河北大学;
2、导师为第一作者的,学生为第二作者的,学生科研成果按第一作者核算;
非导师为第一作者的,学生按次序依次核算;
3、所有计分的项目、论题、成果奖必须与申请人所从事的专业密切相关;
4、科研成果刊发(下达)或校样截止日期为2019年9月24日;
5、科研成果只允许用于单次此奖项的评审,当年获奖后,以后不得重复使用;
6、科研成果最终得分为各分项得分累计相加得到;
7、积分相同的,应侧重考核影响因子。
二、科研成果具体量化评分标准:
1、科研项目:评分标准见表1。
表1
表2
3、科研成果奖C3:对于河北省(含省内厅局级)获奖成果,河北大学必须是第一完成单位;对于国家级获奖成果,河北大学必须是额定完成单位、我校教师为额定授奖人员。
依据奖励级别及排名计分,评分标准见表3。
表3。

河北省科学技术厅关于印发2024年度河北省省级科技计划基础研究(自然科学基金)项目申报指南的通知文章属性•【制定机关】河北省科学技术厅•【公布日期】2024.02.07•【字号】冀科金〔2024〕1号•【施行日期】2024.02.07•【效力等级】地方规范性文件•【时效性】现行有效•【主题分类】科学技术综合规定正文河北省科学技术厅关于印发2024年度河北省省级科技计划基础研究(自然科学基金)项目申报指南的通知冀科金〔2024〕1号各有关单位:省科技厅研究编制了2024年度河北省省级科技计划基础研究(自然科学基金)项目申报指南(电子版请在省科技厅网站下载),现印发给你们。
请按照要求,结合工作实际,认真组织推荐项目。
申报及推荐审核项目须通过“河北省科学技术厅网站”—“科技管理”—“科技计划”—“河北省科技计划项目综合服务平台”在线操作。
在项目申报前,请务必认真阅读申报流程。
申报项目采用“无纸化”方式,只需在线提交、审核电子申报书及其附件材料,无需在申报阶段报送纸质材料。
申请人网络受理时间:2024年2月27日至3月7日17:00申报单位审核截止时间:2024年3月11日17:00依托单位审核截止时间:2024年3月14日17:00业务咨询电话:河北省自然科学基金委员会办公室0311-66505379 85815545 85817132项目综合服务平台技术支持:*************82620020监督电话:*************附件:基础研究(自然科学基金)项目申报指南河北省科学技术厅2024年2月7日附件基础研究(自然科学基金)项目申报指南一、总体安排以习近平新时代中国特色社会主义思想为指导,深入贯彻落实习近平总书记关于科技创新的重要论述特别是关于基础研究的重要讲话重要指示批示精神,围绕省委、省政府对基础研究工作部署,坚持“四个面向”,坚持自由探索和目标导向统筹推进,瞄准我省战略性新兴产业、高成长性产业、传统优势产业发展的关键共性技术基础研发需求,以重大原始创新和关键核心技术突破为主线,凝聚创新合力,培养基础研究人才团队,促进基础研究与应用研究融通创新发展,为加快建设经济强省、美丽河北,奋力谱写中国式现代化建设河北篇章提供源头支撑。

河北省教育厅关于公布2007―2012年全省学生阳光体育冬季长跑活动优秀学校评选结果的通知文章属性•【制定机关】河北省教育厅•【公布日期】2014.02.24•【字号】冀教政体[2014]20号•【施行日期】2014.02.24•【效力等级】地方规范性文件•【时效性】现行有效•【主题分类】体育正文河北省教育厅关于公布2007-2012年全省学生阳光体育冬季长跑活动优秀学校评选结果的通知(冀教政体〔2014〕20号)各设区市教育局,定州、辛集市教育局,各普通高等学校:2013年6月-12月,全省各地各高校按照我厅《关于组织开展2007-2012年全省学生阳光体育冬季长跑优秀学校评选表彰活动的通知》(冀教政体〔2013〕75号)要求,认真开展了2007-2012年全省学生阳光体育冬季长跑优秀学校推荐、申报工作。
经组织专家评审,现将2007-2012年全省学生阳光体育冬季长跑活动优秀学校评选结果予以公布。
希望受到表彰的学校再接再厉,继续发挥带头和引领作用,为推动全省学生阳光体育运动的持久健康开展做出新的更大贡献。
附件:2007-2012年全省学生阳光体育冬季长跑活动优秀学校名单河北省教育厅2014年2月24日附件2007-2012年全省学生阳光体育冬季长跑活动优秀学校名单石家庄市石家庄市第二中学石家庄市二中实验学校石家庄市第十五中学石家庄市第二实验中学河北师大附中石家庄市和平东路小学石家庄市深泽县中学石家庄市深泽县赵八中学藁城市第九中学藁城市第八中学小学部藁城市实验学校石家庄市第二十七中学石家庄市第四十中学石家庄市神兴小学石家庄市第四十二中学石家庄市西三庄学校石家庄市自强小学石家庄市兴华小学鹿泉市上庄镇上庄小学石家庄市翟营大街小学正定县南牛学区东邢家庄小学正定县南牛乡牛家庄小学正定县南楼乡中学正定县第三中学石家庄市师大附中高新校区石家庄高新区第二小学石家庄市第十六中学石家庄市矿区中学石家庄矿区实验中学石家庄矿区冯家沟小学河北灵寿中学灵寿县初级中学灵寿县寨头中学河北省元氏县第一中学石家庄市元氏县第六中学石家庄市元氏县宋曹中心小学新乐市第一中学新乐市协神学校鹿泉市实验初级中学鹿泉市第一中学石家庄市第二十中学石家庄市井陉县障城中学石家庄市井陉县秀林镇中学石家庄市井陉县南秀林小学井陉县天长镇河东学校高邑县五百村学校高邑县北营中学石家庄市国泰街小学石家庄市宁安路小学行唐县第一中学行唐县第二中学行唐县实验学校石家庄市二十四中学石家庄市第二十二中学新乐市童心艺术小学张家口市张家口市宣化第一中学张家口市宣化第四中学张家口市宣化区建国街小学秦皇岛市秦皇岛市海港区东港路小学秦皇岛市第十六中学秦皇岛市海港区临河里小学秦皇岛市北戴河中学秦皇岛市北戴河区第三中学秦皇岛市北戴河区海北路小学秦皇岛市北戴河区育花路小学秦皇岛市山海关区渝东街小学秦皇岛市山海关区第二中学秦皇岛市开发区燕山大学附属中学秦皇岛市开发区深河中学秦皇岛市开发区第三中学秦皇岛市开发区第三小学秦皇岛北戴河新区大蒲河小学秦皇岛北戴河新区大蒲河中学秦皇岛市卢龙县第一实验小学秦皇岛市卢龙县燕河营镇中学秦皇岛市卢龙县刘田庄中学秦皇岛市卢龙县大李佃子中学秦皇岛市青龙县第二实验小学秦皇岛市青龙县马圈子初级中学秦皇岛市青龙县肖营子高级中学秦皇岛市抚宁县第一中学秦皇岛市抚宁县留守营学区张各庄初级中学秦皇岛市抚宁县留守营学区留守营小学秦皇岛市昌黎县安山镇实验学校秦皇岛市昌黎县十里铺中心小学河北昌黎第一中学秦皇岛市第一中学唐山市唐山市双新小学唐山市开滦十中唐山市第五中学唐山市西山路小学唐山市二十七中学唐山市第十二高级中学唐山市稻地小学唐山市大齐学校唐山市实验小学东校区唐山市东田庄学校唐山市车轴山中学唐山市丰润区第三小学唐山市杨官林镇石佛林小学唐山市丰润镇中学唐山市第四十九中学唐山市第二十三中学唐山市开平小学唐山市职教中心唐山市实验小学唐山市第十七中学唐山市滦县古城办事处秦庄小学唐山市滦县第一中学唐山市滦县兴隆庄中学迁安市建昌营初级中学迁安市第二中学迁安市夏官营镇初级中学迁安市杨店子镇杨店子中心完全小学唐山市迁西县第二中学唐山市迁西县第三中学唐山市迁西县实验小学唐山市玉田县唐自头镇东三乐台中学唐山市玉田县林南仓中学唐山市玉田县第二中学唐山市玉田县兰坡小学遵化市东旧寨镇梁屯中心小学遵化市第二中学遵化市高级中学遵化市平安城中学西校唐山市乐亭县第三实验小学唐山市乐亭县第一中学唐山市乐亭县汀流河镇大杨庄中学唐山市乐亭县姜各庄初级中学唐山市滦南县胡各庄镇中心小学唐山市滦南县第二高级中学唐山市滦南县唐山英才学校唐山市汉沽管理区第一中学唐山市汉沽管理区第一小学唐山市芦台经济开发区第一中学唐山市芦台经济开发区实验小学唐山市南堡经济开发区第一中学唐山市南堡经济开发区第一小学唐山市第五十九中学唐山市龙富小学唐山市第一中学唐山市第二中学唐山市开滦第一中学唐山市开滦第二中学唐山市外国语学校唐山市第十中学唐山市第十一中学唐山师范学院附属小学廊坊市三河市燕郊小学三河市第二中学三河市汇福实验学校三河市第八中学三河市第五小学廊坊市大城县臧屯第二中学廊坊市大城县留各庄中心学校廊坊市电子信息工程学校廊坊市大厂县北坞回民小学廊坊市大厂县大厂职业技术教育中心廊坊市大厂县祁各庄中心学校廊坊市大厂县南寺头回民小学廊坊市大城县大城第二中学廊坊市第六小学廊坊市第六中学廊坊市大城县纪庄完全小学廊坊市大城县第四中学廊坊市大城县郑家村中心小学廊坊市固安县第二中学廊坊市固安县第四小学廊坊市永清县养马庄小学廊坊市永清县里澜城中学廊坊市文安县第一小学廊坊市文安县第一中学廊坊市文安县大柳河镇中学廊坊市安次区实验小学廊坊市安次区杨税务中学霸州市第二中霸州市堂二里中心小学霸州市第五中学香河市香河第二中学三河市第五中学三河市马起乏小学廊坊市大厂县回民中学廊坊市大厂县城关小学廊坊市大厂县第二回民中学廊坊市香河县第三中学廊坊市香河县安头屯镇第二中心小学廊坊市永清县刘街乡中学廊坊市永清县永清镇南关厢小学廊坊市固安县渠沟中学廊坊市固安县柳泉乡大韩寨中心小学霸州市第六小学霸州市第二十三中廊坊市文安县第三小学廊坊市文安县第四中学廊坊市大城县城内第二小学廊坊市大城县臧屯乡刘固献中心小学廊坊市大城县第一职业中学廊坊市大城县邢庄子小学廊坊市大城县南赵扶中学廊坊市第七中学廊坊市广阳区草场村小学廊坊市安次区东沽港镇马道口村中心小学保定市徐水县户木乡安庄希望小学徐水县巩固庄中学徐水县漕河镇南留中学河北保定师范附属学校河北涿州市双语学校河北涿州市林屯中心小学河北涿州市东仙坡中学河北涿州大团柳中心校保定市第二十二中学保定市职业技术教育中心保定市第一中学保定市南市区县学街小学保定市永华南路小学保定市涞水县第三中学保定市涞水县石亭小学保定市第十七中学保定市乐凯小学保定定州市东亭镇初级中学保定定州市中心实验小学保定安国市实验中学保定安国市南娄底小学保定市高阳县宏润小学保定市高阳三利中学保定市安新县安州中学保定市博野县博野镇第二中学保定市博野县小店学校河北保定市蠡县中学河北保定蠡县第二实验小学沧州市中小学沧州市石油分局华北油田油建小学沧州市石油分局华北油田机关小学黄骅市南排河镇赵家堡小学沧州市肃宁县梁村中心总校沧州市肃宁县第一实验小学沧州市吴桥县水波小学沧州市盐山县庆云镇东方红小学沧州市盐山县联合小学沧州市运河区新华小学沧州市运河区迎宾路小学沧州市运河区南环小学沧州市运河区运河小学沧州市献县段村乡尧上中心校沧州市沧县捷地乡金城希望小学沧州市沧县仵龙堂乡何官屯学校沧州市沧县东砖河小学沧州市青县实验小学沧州市孟村回民小学沧州市南皮县冯家口小学沧州市海兴县育红小学沧州市海兴县马厂小学沧州市东光县实验小学沧州市东光县世纪小学任丘市西华路长洋淀小学河间市兴村小学泊头市文庙学区中心校沧州市新华区东队小学沧州市第一中学沧州市第二中学沧州市第三中学沧州市石油分局华北油田第二中学沧州市肃宁县第一中学沧州市吴桥县吴桥中学沧州市沧县中学沧州市南皮县第一中学沧州市海兴县海兴中学沧州市孟村回民中学河间市第一中学泊头市第一中学沧州市石油分局华北油田东风中学沧州市石油分局华北油田采一中学黄骅市常郭镇毕孟中学沧州市肃宁县尚村中学沧州市肃宁县第四中学沧州市吴桥县水波中学沧州市盐山县第三中学沧州市盐山县孟店一中沧州市运河区第十中学沧州市运河区第十一中学沧州市献县韩村中学沧州市沧县天狮民族中学沧州市青县第二中学沧州市青县马厂中学沧州市青县盘古中学沧州市南皮第二中学沧州市海兴县第二中学沧州市孟村县第二回民中学沧州市东光县第三中学沧州市东光县大单中学沧州市东光县连镇中学任丘市第二中学河间市留古寺中学河间市第六中学泊头市第二中学泊头市张庄子中学沧州市新华区第九中学衡水市衡水市第十四中学衡水市第六中学衡水市康复小学衡水市武邑县第二中学衡水市武邑县审坡中学衡水市武邑县圈头中学衡水市景县王千寺中学衡水市景县中学衡水市景县龙华中心完小衡水市武强县武强中学衡水市武强县武强街关中学冀州市职教中心冀州市第四中学冀州市小寨中学冀州市第二小学衡水市故城县郑口镇坛村中学衡水市故城县育才中学邢台市邢台市第四中学邢台市第六中学邢台市第十中学邢台市第一中学邢台市第二十三中学邢台市育红小学邢台市幸福源小学邢台市逸夫小学邢台市北关小学邢台市马路街小学邢台市柏乡县内步中心小学邢台市柏乡县龙华中学邢台市新河县新河中学邢台市新河县新河振堂中学邢台市新河县直第一小学沙河市第五中学沙河市第一中学沙河市第二小学邢台市临城县临城镇中学(初)邢台市临城县临河中学邢台市临城县岗西小学邢台市广宗县第一中学邢台市广宗县第二中学邢台市广宗县冯寨学区邢台市巨鹿二中邢台市巨鹿五中邢台市巨鹿东韩庄小学隆尧第二实验小学邢台市桥东区实验学校邢台市隆尧第一中学邢台市隆尧尧山中学邢台市邢台县皇寺中心学校皇寺完小邢台市邢台县马河中学邢台市邢台县晏家屯中学邢台市宁晋县东城实验学校邢台市宁晋县贾家口学区黄儿营西村小学邢台市宁晋县第二中学邢台市威县朝阳路小学邢台市威县第一中学邢台市威县第二中学邢台市第二中学邢台市第三中学邯郸市邯郸市馆陶县第一中学邯郸市馆陶县实验中学邯郸市馆陶县魏僧寨实验小学武安市实验小学武安市实验中学武安市第一中学邯郸市曲周县实验中学邯郸市曲周县实验小学邯郸市曲周县第一中学邯郸市成安县实验小学邯郸市成安县第二中学邯郸市成安县第一中学邯郸市涉县龙北小学邯郸市涉县第四中学邯郸市涉县西达中学邯郸市涉县第二中学邯郸经济开发区中学邯郸市第四中学邯郸市实验小学邯郸市第二十三中学邯郸市邯山区渚河路小学邯郸市邯山区绿化路小学邯郸市邯山区滏河学校邯郸市邯山区农林路小学邯郸市永年县第一实验学校邯郸市永年县第三中学邯郸市邯郸县第三中学邯郸市邯郸县第六中学邯郸市邯郸县芳园实验中学邯郸市邯郸县实验小学邯郸市峰峰矿区第四小学邯郸市第十三中学邯郸市峰峰矿区职业技术教育中心邯郸市魏县第一中学邯郸市魏县第五中学邯郸市魏县实验学校邯郸市临漳县第一中学邯郸市临漳县第一小学邯郸市临漳县实验学校邯郸市磁县讲武城镇学区北白道学校邯郸市磁县第一中学邯郸市磁县高臾镇兴善中心小学邯郸市磁县光禄镇第二中学邯郸市复兴区人民小学邯郸市复兴区人先锋学校邯郸市邱县实验小学邯郸市大名县第三中学邯郸市大名县第二中学邯郸市大名县明德实验小学邯郸市丛台区中华桥小学邯郸市丛台区学步桥小学邯郸市丛台区永合学校邯郸市丛台区联纺学校邯郸市鸡泽县实验小学邯郸市鸡泽县实验中学辛集市辛集市第三中学辛集市辛集镇第三中学辛集市辛集镇第十中学高等学校河北农业大学河北经贸大学河北科技大学河北联合大学河北工程大学廊坊师范学院承德石油高等专科学校华北科技学院防灾科技学院河北政法职业学院河北女子职业技术学院石家庄学院石家庄科技工程职业学院唐山学院唐山职业技术学院唐山工业职业技术学院邢台学院保定职业技术学院沧州师范学院沧州医学高等专科学校。

河北省自然科学基金资助项目申请书填写注意事项申请书是申请和评审基金资助项目的主要依据。
下面对申请书中有关信息填报注意事项说明如下:一、封面及简表1.申请书右上角标志信息:如果申请人属于国家重点实验室、省重点实验室、国家重点学科、省重点学科、博士点,需要填写相应项的名称。
填写时可点击相应表格前空格处,只需填写实验室、学科、博士点名称,如某申请人属于国家重点学科材料物理与化学学科,只需在相应的国家重点学科空白处填写“材料物理与化学”,系统生成申请书时会自动生成:“材料物理与化学国家重点学科”字样。
如果申请项目属于省应用基础研究基地、数学研究中心研究方向的,在相应位置通过下拉菜单选择基地或研究中心名称即可。
2.项目名称:最长为30个汉字长度。
3.项目类别:通过下拉菜单选择。
包括:面上项目、杰出青年科学基金项目、青年科学基金项目、钢铁联合研究基金项目和石药集团医药联合研究基金项目。
4.所属学科:应当按所属学科主次在下拉菜单中选择,最多选择两个,以第一个(左侧)学科为主。
5.学科代码:申请人在撰写申请书时应当选择与申请项目研究方向相符的学科代码,学科代码至少到资助领域下第二级,如“A0101”或“A010101”,而“A”或“A01”不符合要求。
所属学科为两个的,必须相应填写两个学科代码,两个学科代码不能有相互包含的关系,如“A0101”和“A010101”,一个为二级学科代码,另一个为其下面的三级学科代码,这样的填写不符合要求。
学科代码通过下拉菜单选择。
6.起止年月:本次申请项目起始年必须填写“2012”。
面上基金资助项目研究期限一般为3-5年,青年科学基金项目一般为3年,杰出青年科学基金项目资助期固定为3年。
7.申请人信息:姓名前后及各汉字中间不能有空格。
必须填写方便联系的固定电话、移动电话、E-mail等。
证件是身份证的,必须填写18位数字的身份证号码(请申请人及时修改基金项目管理系统个人账户中的相关信息),否则将不能通过形式审查。

风工程研究中心2013年终工作盘点在上级领导、各部门和业内前辈专家的关怀支持下,风工程研究中心于2013年在各方面均取得了一定的发展,各方面的工作汇总如下。
一、研究生培养◇王毅同学(现江苏省交通科学研究院)已申报河北省优秀硕士学位论文◇四位硕士毕业生走上工作岗位:李先婷:中铁工程设计咨询集团有限公司孟绍军:恒大地产集团翟晶:中国矿业大学银川学院郑云飞:石家庄公司◇新招收8名硕士生张海东李聪辉袁欣欣卢金玉刘晓玲闫煦东秦其伟韩晓乐二、科学研究新增科研项目:◇刘庆宽: 国家自然科学基金面上项目;河北省高校百名创新优秀人才项目;土木工程防灾国家重点实验室开放基金资助项目;河北省留学人员科技资助项目。
◇马文勇:国家自然科学基金国际合作项目。
◇刘小兵:国家自然科学基金青年项目;河北省教育厅基金青年项目。
在研科研项目:◇刘庆宽: 教育部新世纪优秀人才项目。
◇马文勇: 国家自然科学基金青年项目;河北省自然科学基金项目。
◇刘小兵: 河北省自然科学基金项目。
三、研究成果◇2013年1月25日,由河北省科技成果转化中心组织并主持,邀请同行专家组成鉴定委员会,对中心主持完成的《大型结构抗风关键技术及应用》成果进行了鉴定。
成果得到了与会专家的好评。
◇中心主持的《大型结构抗风关键技术及应用》获得河北省科技进步一等奖。
四、承办国际会议◇2013年5月10-12日,第八届中日韩国际风工程学术会议在我校举办,刘庆宽教授作为组委会主席主持了会议。
来自中日韩三国包括国际风工程学会主席、国际桥梁与结构工程学会副主席、国际风工程学会秘书长、三个国家的风工程学会主席和秘书长在内的52名代表参加了会议。
会后国内外代表反馈良好,多位学会的领导会后向学校发来贺信和感谢信,其中国际风工程学会主席Y. Tamura教授在闭幕式上总结发言说“ The success of the Workshop isbeyond reach, so it can merely regarded as a forever memory, rather than a standard for the future workshop.”五、发表文章1. 刘庆宽,郑云飞,马文勇,刘小兵,雷诺数效应对斜拉索气动特性的影响,工程力学,2013,30:284-2892. 刘庆宽,孟绍军,李宗益,马文勇,刘小兵,结构顶部不均匀雪荷载分布的研究方法,建筑科学,2013,29(1):143-1494.3. 马文勇,刘庆宽,刘小兵,尉耀元,群体高层建筑行人区域风环境试验研究[J],工程力学,2013,30:304-3084. 马文勇,刘庆宽,刘小兵,尉耀元,风洞试验中测压管路信号畸变及修正研究,实验流体力学,2013,27(4):71-775. 刘小兵,陈政清,刘志文,桥梁断面颤振稳定性的直接计算法,振动与冲击, 2013, 32(1):78-826.Vinayagamurthy G, Liu Qingkuan(通讯作者), Yunfei Zheng, Masahiro Matsui, YukioTamura, Effect of Wind Speed, Cable Inclination and Wind Yaw Angles on Stay Cable Vibration , Journal of Wind and Engineering, V ol.10(1), 2013: 1-237. Chaoqun Liu, Lin Chen, Ping Lu, Xiaobing Liu. Study on multiple ring-like vortexformation and small vortex generation in late flowtransition on a flat plate Theoretical andComputational Fluid Dynamics. 2013, 27: 41-708. 翟晶,刘庆宽,马文勇. 球面壳体结构风荷载特性试验研究[J]. 工程力学, 2013, 30: 15-189. Qingkuan Liu. Codes comparison and wind tunnelsimulation of wind induced snowdrift. Proceedings ofthe 8th China-Japan-Korea International Workshopon Wind Engineering, May 10-12, Shijiazhuang,97-10410. 刘庆宽,孟绍军,马文勇,刘小兵,风致雪漂移的规范比较与风洞试验方法初步研究,第十六届全国结构风工程学术会议,2013年7月29日-8月3日,成都,215-21611. 刘庆宽,郑云飞,刘小兵,马文勇,斜拉索风雨振的激振因素和气动控制措施,第十六届全国结构风工程学术会议,2013年7月29日-8月3日,成都,115-11612. 马文勇,刘庆宽,侯丽倩,刘小兵,三维方柱流场及风压分布试验研究,第十六届全国结构风工程学术会议,2013年7月29日-8月3日,成都,81-8213. 刘小兵,刘庆宽,马文勇,易调式斜拉索风雨振试验支架的设计及应用,第十六届全国结构风工程学术会议,2013年7月29日-8月3日,成都,221-22214. 赵善博,刘庆宽,马文勇,伞状中空悬挑结构风荷载研究,第十六届全国结构风工程学术会议,2013年7月29日-8月3日,成都,427-42815. 陆煜,刘庆宽,刘小兵,体育场屋盖表面风压特性的风洞试验研究,第十六届全国结构风工程学术会议,2013年7月29日-8月3日,成都429-43016. 李宗益,马文勇,刘庆宽,平板网架结构分区风荷载分布,第十六届全国结构风工程学术会议,2013年7月29日-8月3日,成都,425-42617. 李玲芝,马文勇,张晓斌,刘庆宽,准椭圆形冰导线气动压力分布特性研究,第十六届全国结构风工程学术会议,2013年7月29日-8月3日,成都,259-26018. 崔彦,刘小兵,刘庆宽,王彦彪,宽高比为5:1的矩形断面柱气动力特性试验研究,第十六届全国结构风工程学术会议,2013年7月29日-8月3日,成都,257-25819. 林志兴,马文勇,刘庆宽,圆形球壳风压分布及干扰效应研究,第十六届全国结构风工程学术会议,2013年7月29日-8月3日,成都,91-9220. 陈军,魏庆鼎,刘庆宽,马文勇,王铁进,盐城市博物馆风荷载风洞实验研究,第十六届全国结构风工程学术会议,2013年7月29日-8月3日,成都,189-190六、参加国内外学术会议◇ 2013年4月28日,刘庆宽应邀参加北京交通大学111项目创新引智基地启动仪式和学术研讨会,并做了报告。

河北省科学技术厅关于印发《河北省基础研究计划概念验证项目实施方案》的通知文章属性•【制定机关】河北省科学技术厅•【公布日期】2024.04.14•【字号】冀科金〔2024〕2号•【施行日期】2024.04.14•【效力等级】地方规范性文件•【时效性】现行有效•【主题分类】科学技术综合规定正文河北省科学技术厅关于印发《河北省基础研究计划概念验证项目实施方案》的通知冀科金〔2024〕2号各有关单位:为加速推动基础研究成果转化,开辟发展新领域新赛道,促进新质生产力形成,省科技厅制定了《河北省基础研究计划概念验证项目实施方案》现印发给你们,请结合实际抓好落实。
河北省科学技术厅2024年4月14日河北省基础研究计划概念验证项目实施方案为全面贯彻落实党的二十大精神,深入学习贯彻习近平总书记对河北工作重要指示批示精神以及关于基础研究的重要论述,认真落实省委、省政府关于科技创新工作的部署要求,加快实施创新驱动发展战略,加速推动基础研究成果转化,特制定概念验证项目实施方案。
一、总体思路依托储备大量基础研究成果、具备较高基础研究能力的高等院校、科研机构、医疗卫生机构和企业等创新主体,聚焦成果转化的早期阶段,对具有潜在市场使用价值和高门槛价值的基础研究成果,开展概念验证资金支持,畅通成果转移转化“最初一公里”,助力创新主体开展基础研究成果转化,加快开辟发展新领域新赛道,促进新质生产力形成,引领战略性新兴产业和未来产业发展。
二、目标任务按照成熟一个、实施一个的原则,聚焦集成电路、网络安全、生物医药、电力装备、安全应急装备等战略性新兴产业和各市主导产业发展需求,结合依托单位的优势研究领域,组织实施一批概念验证项目,加速挖掘和释放前沿性、颠覆性基础研究成果的价值,助力产业“新物种”的顺利诞生,推动一批基础研究成果在河北落地见效,促进我省经济转型升级和高质量发展。
三、支持方式充分发挥和调动创新主体开展有组织的科研和科研成果转化的积极性,探索“认定试点单位试点单位推荐直接立项支持”的项目生成方式,支持具备较高基础研究能力的高等院校等创新主体开展概念验证和成果转化。


2015年度河北省自然科学奖推荐项目公示一、项目名称:地下密集敷设电缆群温度场和载流量评估中关键问题的研究二、推荐单位:河北省教育厅三、项目简介:本项目属于工程技术学科,是在河北省自然科学基金(地下电缆群多场耦合机理及载流量评估方法中关键问题的研究E2009000719)、(电气火灾隐患模式及其灾变机理的研究F2005000422),石家庄市科技支撑计划(电力电缆动态负荷实时预测方法与系统研究),河北科技大学创新团队项目(电气设备仿真、检测与状态评估),河北科技大学效力基金项目(电力电缆载流量计算和温度场分布研究)(集群敷设电缆群暂态温度场计算方法的研究)等项目的资助下,对电力电缆线路转入地下敷设带来的影响因素复杂化、电缆成集群化敷设、温度场计算呈现热电偶合、多物理场耦合等现状进行研究,利用数值仿真为基础,给出了准确确定电力电缆群的载流量的方法。
该项目对于电气工程热电耦合和多场耦合温度场计算方面的研究具有重要的意义,该项目的成果对于电力系统电力电缆负荷调配具有指导性意义。
项目组在国内外电气工程重要期刊及会议发表学术论文30余篇。
8篇代表作被国内外学者引用163次,其中SCI杂志他引4次。
在本项目中我们主要得出了以下几方面成果。
第一:模拟热荷法在土壤直埋电缆群温度场计算中的应用。
类似于模拟电荷法在静电场中计算电场分布的应用,提出模拟热荷法,计算土壤直埋电缆群温度场分布。
模拟热荷法与有限元、有限差分等相比,具有便于理解和编程、对计算机配置要求低、计算速度快的优点。
第二:基于多场耦合的电缆群稳态温度场和载流量计算方法。
利用有限元实现了土壤直埋电缆群温度场、电磁场、水分迁移场的耦合计算,给出了地下直埋电缆稳态温度场和额定载流量计算方法。
对于排管敷设、沟槽敷设和隧道敷设等方式下的电力电缆群,由于含有中间空气层,其温度场是一个耦合了热传导、热对流和热辐射的复杂温度场计算过程。
利用SUPG 有限元耦合计算了这种敷设方式下的温度场和载流量,具有更高的精度。
河北省自然科学基金资助项目申请书申请时间∶2010年12 月24 日填写说明一、填写前要认真查阅河北省自然科学基金管理的有关规定。
内容表达要明确、严谨,字迹要清晰,空格不够时可另加页。
使用外来语要同时用中文表达。
首次出现的外文缩写标明外文全称。
二、“学科”分7大类,即∶数理、化学、生命、地球、材料与工程、信息、管理。
填写时要按照主要研究内容确定所属学科,并填写学科代码。
如难以界定的可同时填写两个学科及代码,但仍以前一个为主,禁止同一研究内容同时多学科申报.三、项目名称限制在30个汉字以内,关键词最多不超过30个汉字长度。
“预期水平”栏中选择国际领先、国际先进、国内领先、国内先进之一。
类别∶按申报项目性质在属纯基础和应用基础中选择。
四、申请者必须是所在单位实际主持本研究工作的首席研究人,只能一名,工作稳定,有研究、组织能力,时间上有保证。
参加人为实际从事本研究工作的人员,顾问等指导性工作人员不列入其中。
青年专项基金项目负责人,实足年龄在35岁及以下,项目组成员主要是年轻人。
五、项目申请人和项目组成员在研省基金项目已满两项的,不再受理其新申请项目。
六、项目经费限于本项目研究工作直接需要的开支,实事求是,勤俭节约。
应充分利用已有条件和可以利用的协作条件,多渠道积极争取经费。
七、使用基金会办公室提供的录入系统填写申请书,由申请者所在单位审查、筛选后统一报基金会办公室,一式六份,其中原件一份。
一、简表三、立论依据(研究意义、国内外研究现状及分析,附主要参考文献目录)1。
研究的意义在现有的300多种激光晶体中,有290多种激光晶体是以稀土作为激活离子的。
因此,研究固体中的稀土光谱在理论和实用上都具有重要意义.2。
研究概况许多学者采用各种方法从理论和实验的不同角度研究了Judd—Ofelt参数。
在现有的300多种激光晶体中,有290多种是以稀土作为激活离子的。
因此,研究固体中的稀土光谱在理论和实用上都有重要意义。
!第"#卷第#期郑州大学学报!理学版"$%&’"#(%’# !)*#+年,月-./012340%56278.!(9:.;<7.=>."?9@.)*#+基于非线性干扰观测器的机械臂终端滑模控制杨!鹏#!)!!王晓周#!)!!王!婕#!)!!张高巍#!)!#.河北工业大学控制科学与工程学院!天津,**#,*$).智能康复装置与检测技术教育部工程研究中心!天津,**#,*"摘要!为了在干扰存在的情况下实现对五自由度机械臂的有效控制#提出了一种基于非线性干扰观测器的终端滑模控制策略.通过选择适当的非线性增益函数#干扰观测器能够精确地估计未知干扰#实现对控制器的补偿#降低滑模控制抖振.非奇异快速终端滑模面的设计提高了收敛速度#保证轨迹跟踪误差在有限时间内快速收敛.基于]M9L52%8方法证明了闭环系统的稳定性#数值仿真结果验证了所设计方法的有效性.关键词!机械臂$轨迹跟踪$终端滑模$干扰观测器中图分类号!P U)E)文献标志码!G文章编号!#CD#B CAE#!)*#+"*#B**DAB*C!"#!#*’#,D*"Q R.7S S2.#CD#B CAE#’)*#D),+$%引言家庭服务机器人是机器人发展的重要方向之一#而机械臂控制对服务机器人执行各种类人任务至关重要(#).作为一种复杂的非线性系统#机械臂易受不确定的因素#包括不确定的惯性’未知的重力转矩’未知的摩擦力矩和其他干扰的影响()).这些难以预测的不确定性影响了机械臂的控制精度及可靠性.因此#必须设计鲁棒控制方法处理上述干扰#以实现预期的性能.对不确定性及干扰的处理#文献(,X")提出了多种方法.滑模控制具有较强的鲁棒性和快速响应能力#常被应用于各种非线性不确定系统的控制中#但滑模控制的不连续性会引起控制的抖振.干扰观测器提供了处理干扰和不确定性的另一种方法.和其他干扰估计与抑制方法相比#非线性干扰观测器以其简单直观及严格的稳定性分析得到了广泛的研究和应用.为了估计高度非线性’强耦合的机械臂的未知干扰#文献(C)提出用非线性干扰观测器估计干扰及参数不确定性#然后通过估计值对控制器进行补偿.文献(D)提出了一种新型非线性干扰观测器#解决了干扰观测器的系统设计问题#并将其应用于机械臂控制#但不能实现有限时间控制.文献(A)研究了具有参数不确定性和外部干扰的空间机械臂的鲁棒跟踪控制问题#提出一种基于干扰观测器的输出反馈自适应控制方法#采用模糊逻辑系统来估计和补偿集总干扰.文献(+)针对具有模型不确定性和受外界干扰的机械臂轨迹跟踪控制问题#设计了由非线性控制器’速度观测器和干扰观测器组成的复合控制器#并给出了半全局渐近稳定性条件.上述控制方法中系统都是渐近稳定的#与渐近稳定系统相比#有限时间稳定系统通常表现出更快的收敛速度和更好的抗干扰性能(#*X##).基于干扰观测器的终端滑模控制方法是一个有效的复合控制方法#将干扰观测值作为前馈补偿#能够及时有效地抑制干扰.本文针对五自由度机械臂的运动控制问题#研究一种非奇异终端滑模控制与非线性干扰观测器相结合的复合控制器.将系统模型不确定性和外界干扰作为复合干扰!集总干扰"#设计了非奇异终端滑模控制器#以实现对系统的鲁棒控制及跟踪误差的有限时间收敛#同时利用干扰观测器估计集总干扰#对滑模控制器进行前馈补偿以削弱控制抖振.收稿日期!)*#DB*AB##基金项目!国家自然科学基金青年项目!C#"*,##A"$河北省自然科学基金项目!F)*#")*)),##F)*#")*)#"*"$天津市自然科学基金项目!#D-Y h(-Y*EE**"$河北省高等学校科学技术研究项目!h()*#"*CA".作者简介!杨鹏!#+C*%"#男#河北秦皇岛人#教授#主要从事系统建模和控制研究#=B I97&&M L01Z5:N#C,.<%I$通信作者&王婕!#+AC%"#女#辽宁北票人#讲师#主要从事非线性鲁棒控制’变结构控制和有限时间控制研究#=B I97&&[923R71N01Z5:.1>5.<2.Copyright©博看网 . All Rights Reserved.!第#期杨!鹏#等$基于非线性干扰观测器的机械臂终端滑模控制&%模型描述机械臂的各个关节都为旋转关节#考虑由外界干扰和模型误差组成的复合干扰#串联刚性连接的机械臂模型可以表示为(!>">y #2!>#>,">,#?!>"#8!>,"-(#(=#!#"式中&>’>,’>y (S 7分别表示关节角度矢量’角速度矢量和角加速度矢量$(为控制输入$(!>"为7/7阶正定对称惯性矩阵$2!>#>,"为7/7阶离心力和哥氏力矩阵$?!>"为7维重力项矢量$8!>,"表示关节摩擦力矩$(=为施加在机械臂关节的外加有界干扰.通常情况下#机械臂的精确动力学模型难以得到#将模型分为已知部分和不确定部分&(!>"-(*!>"#!(!>"#2!>#>,"-2*!>#>,"#!2!>#>,"#?!>"-?*!>"#!?!>"#(*!>"’2*!>’>,"’?*!>"为模型的名义矩阵#!(!>"’!2!>#>,"’!?!>"代表系统矩阵的不确定部分.因此#机械臂动力学模型可以表示为(*!>">y #2*!>#>,">,#?*!>"-(#;#!)"式中&;-(=.!(!>">y .!2!>#>,">,.!?.8#表示由模型不确定项和外加干扰组成的复合干扰#;有界且其上界未知1控制目标为设计反馈控制律(!>#>,"#使五自由度机械臂关节角度>在有限时间内达到对期望运动角度>=的快速准确跟踪.+%干扰观测器设计在实际工程中#复合干扰;通常很难获得#需要对其进行估计#但是干扰的估计值与实际值之间存在一定的误差1干扰观测器设计的基本思想是用估计输出与实际输出的差值对估计值进行修正1用;u 表示对干扰;的估计#非线性干扰观测器设计方程为;u ,-9!>#>,"!;.;u "-.9!>#>,";u #9!>#>,";-.9!>#>,";u #9!>#>,"((*!>">y #2*!>#>,">,#?*!>".()#!,"式中&9!>#>,"为正定观测器增益矩阵1假设干扰的变化相对观测器的动态特性是缓慢的#即;,-*1定义干扰估计误差<=-;.;u #则<,=-.;u ,-.9!>#>,"!;.;u "-.9!>#>,"<=#且干扰估计误差满足<,=#9!>#>,"<=-*1!E "!!选取合适的增益函数9!>#>,"#可以使干扰估计误差指数收敛到零.然而在实际工程中#由于观测噪声很难通过微分角速度信号得到角加速度信号.因此#必须对上述干扰估计方法加以改进#得到无须角加速度信息的干扰观测器.定义辅助向量@-;u .A !>#>,"#其中A !>#>,"为待设计的函数向量#9!>#>,"与A !>#>,"存在如下关系&>>"A !>#>,"-9!>#>,"(*!>">y 1!""!!对@求导得&@,-;u ,.A ,!>#>,"-.9!>#>,";u #9!>#>,"((*!>">y #2*!>#>,">,#?*!>".().9!>#>,"(*!>">y -.9!>#>,";u #9!>#>,"(2*!>#>,">,#?*!>".()-.9!>#>,"@#9!>#>,"(2*!>#>,">,#*!>".(.A !>#>,")1因此#改进的干扰观测器方程为;u -@#A !>#>,"$@,-.9!>#>,"@#9!>#>,"(2*!>#>,">,#?*!>".(.A !>#>,")1!C "对观测误差<=求导得<,=-.;u ,-.@,.A ,!>#>,"1!D "将式!C "代入式!D "得+D Copyright©博看网 . All Rights Reserved.郑州大学学报!理学版"第"#卷<,=-9!>#>,"@.9!>#>,"(2*!>#>,">,#?*!>".(.A !>#>,").9!>#>,"(*!>">y -.9!>#>,"(2*!>#>,">,#?*!>"#(*!>">y .()#9!>#>,"(@#A !>#>,")-.9!>#>,"!;.;u "-.9!>#>,"<=1!A "!!选择]M 9L52%8函数’#-#)<P =<=#则’,#-<P =<,=-.<P=9!>#>,"<=’*#因此干扰估计误差渐近收敛1当选取较大的9!>#>,"#可以使<=快速收敛#实现观测器对干扰的准确估计.-%控制器设计设计具有较快收敛速度的非奇异快速终端滑模面B 为B -<#0S 73!<")#1S 73!<,""#!+"式中&<!""表示角度跟踪误差#<!""->!"".>=!""$B -(B ##B ##-#B 7)P (S 7#0->793!:##:)#-#:7"#1->793!P ##P )#-#P 7"#:##:)#-#:7#P ##P )#-#P 7是大于*的常数$)->793!"##")#-#"7"#"->793!!##!)#-#!7"##K !;K )#";]!;##’;’7$S 73!<")-(<#"#S 32!<#"#-#<7"7S 32!<7")P#S32!,"为符号函数#S 73!<,""的表示与S 73!<")相同.针对机械臂动力学模型!)"#设计基于非线性干扰观测器的滑模控制律为(-(*!>">y =#2*!>#>,">,#?*!>".(*1.#".#!77#0)>793!<;";.#""S 73!<,")77.".;u .(*(6#B #6)S 73!B "*)#!#*"图&!控制系统框图’()*&!P 01>793@9I %\<%2:@%&S M S :1I式中&77为7阶单位矩阵$6#->793!X ###-#X #7"#6)->793!X )##-#X )7"#X #;’X );为大于*的常数$*->793!%##%)#-#%7"#*K %##-#%7K ##;u 为干扰观测器的输出.估计的集总干扰直接抵消实际干扰的影响#控制系统框图如图#所示.定理&%考虑机械臂动力学模型!)"#用干扰观测器方程!C "估计系统集总干扰;#设计非奇异终端滑模函数!+"及控制律!#*"#则轨迹跟踪误差在有限时间内收敛.证明!选取]M 9L52%8函数’)-#)B P B #对’)求导得’,)-B PB ,1由式!E "’式!+"得’,)-B P(<,#0)>793!<;";.#"<,#1">793!<,;!;.#"<y )1!##"对<求二阶导数并代入式!##"得’,)-B P 0<,#0)>793!<;";.#"<,#1">793!<,;!;.#",((.#*!.2*!>#>,">,.?*!>"#(#;".>y =)11!#)"将式!#*"代入式!#)"得’,)-B P1">793!<,;!;.#"(.!6#B #6)S73!B "*".(.#*!;u .;")-.B P 1">793!<,;!;.#"!6#B #6)S 73!B "*.(.#*<="’.B P 1">793!<,;!;.#"(6#B #!6).>793!(.#*<=">793.#!S 73!B "*""S 73!B "*)1!#,"若矩阵6).>793!(.#*<=">793.#!S 73!B "*"正定#则’,)’.)X .#’)).)!*##"L )X .)’)!*##"L )#!#E "式中&X .#’X .)分别为正定对角矩阵1">793!<,;!;.#"6#’1">793!<,;!;.#"!6).>793!(.#*<=",>793.#!S 73!B "*""的对角元素的最小值1取’-’##’)#当干扰估计误差收敛到零时#’#-*#’,-’,)’.B P 1">793!<,;!;.#"(6#B #6)S 73!B "*)#则’,’.)X .#’).)!%##"L )X .N )’!%##"L )#其中X .N )为正定对角矩阵1">793!<,;!;.#"6)的对角元素的最小值1根据文献(#))#系统状态在有限时间"’.&2!!X .#’!#.*"L )#*A Copyright©博看网 . All Rights Reserved.!第#期杨!鹏#等$基于非线性干扰观测器的机械臂终端滑模控制)!*.#"L )X .N )"L )!*.#"L )X .N )"L !X .N )!#.*""内收敛到滑模面B -$#进而轨迹跟踪误差沿滑模面在有限时间内收敛到零..%仿真结果为了验证所提出的控制策略的有效性#对文献(#,)中的五自由度机械臂系统进行了仿真分析#其机械臂简图如图)所示#其中[#为肩关节屈伸角#[)为肩关节外展内收角#[,为肘关节屈伸角#[E 为腕关节内旋’外旋角#["为腕关节屈伸角.以每个关节中心点为原点建立坐标系#各关节绕J 轴旋转.图+!五自由度机械臂简图’()*+!P 01>793@9I %\\781>13@11B %\B \@11>%I@%Z%:7<I 927L5&9:%@式!#"中(!>"’2!>#>,"’?!>"的组成及详细参数见文献(#,)#关节摩擦力矩8!>,"-*’)S 32!>,"#系统的外加干扰(=-*’#(S 72!""!S 72!""!S 72!""!S 72!""!S 72!"")P 1利用干扰观测器方程!C "观测未知复合干扰#取A !>#>,"-,**>,#非线性增益函数9!>#>,"-,**(.#*1取(*!>"-*’A (!>"#因为(!>"为对称正定矩阵#(.#*也为对称正定矩阵#故%9!>#>,"%]*1滑模函数由式!+"给出#各参数设计为0->793!E #E #E #E #E "#1->793!*’E #*’E #*’E #*’E #*’E "#)->793!)#)#)#)#)"#"->793!#’"##’"##’"##’"##’""#控制器参数6#->793!)*#)*#)*#)*#,*"#6)->793!*’###*’###*’###*’###*’##"#*->793!*’)#*’)#*’)#*’)#*’)"1各关节初始角度取*’"@9>#初始角速度取*#观测器初值取*#期望关节角度取[;=-S 72!"#!;.#"%L ""#;-##-#"#仿真结果见图,i 图C.图-!关节角度跟踪曲线’()*-!P @9<J723<5@81%\R %72:923&1图.!关节角度跟踪误差’()*.!P @9<J7231@@%@%\R %72:923&1图,为关节角度跟踪曲线#图E 为关节角度跟踪误差.可以看出#在系统存在模型不确定性和外界干扰情况下#设计的终端滑模控制器能够使机械臂对指令轨迹做出快速响应#跟踪误差在有限时间内收敛.与现有方法相比#本文所提出的控制方法误差收敛速度更快.图"为干扰及干扰估计曲线#.=#’.=)’.=,’.=E ’.="分#A Copyright©博看网 . All Rights Reserved.郑州大学学报!理学版"第"#卷别为关节#i "处的复合干扰.可以看出#设计的干扰观测器能够实现对干扰的准确观测#其观测值为控制器提供补偿#采用干扰观测器补偿的方法可以减小控制抖振.为证明干扰观测器的有效性#针对相同的机械臂系统#设计无干扰观测器补偿的滑模控制器#滑模切换项增益不小于干扰上界#即X );!%;%#其他控制器参数与本文所提出的控制器参数相同#在两种控制器下的控制输入如图C 所示.可以看出#本文所提出的控制器控制力矩曲线连续光滑#基本无抖振!第"个关节控制曲线的不连续是由不连续摩擦引起的"#且由于切换增益较小#所需的起始力矩较小#而无干扰观测器补偿的滑模控制器控制力矩存在较强的抖振且起始力矩较大.图/!干扰及干扰估计曲线’()*/!d 7S :5@Z92<192>7:S 1S :7I 9:7%2<5@81图0!控制输入’()*0!Y %2:@%&72L5:/%结论针对五自由度机械臂的控制问题#设计了基于干扰观测器的非奇异终端滑模控制策略.将外界干扰和系统模型不确定性看作集总干扰#利用非线性干扰观测器逼近系统干扰#不需要知道系统干扰的上界且能够削弱控制抖振.设计的非奇异终端滑模面能够使系统在有限时间内收敛#加快了对指令的响应速度.理论分析和仿真结果表明#所提出的干扰观测器能够实现对干扰的准确观测#基于干扰观测器的滑模控制能够有效削弱抖振且使轨迹跟踪误差在有限时间内收敛.参考文献!(#)!徐昱琳#杨永焕#李昕#等.基于双目视觉的服务机器人仿人机械臂控制(-).上海大学学报!自然科学版"#)*#)##A !""&"*C X "#).())!Y T =(V]#T e 6/V #P G (?.H @71\L9L1@&9>9L:781215@9&21:[%@J :@9<J723<%2:@%&\%@I 927L5&9:%@S [7:052<1@:972J721I 9:7<S #>M 29I 7<S 92>9<:59:%@I %>1&(-).G 5:%I 9:7<9#)**+#E"!#*"&),#)X ),#A.(,)!陈志旺#薛佳伟.基于不确定逼近的机械手自适应鲁棒预测控制(-).控制理论与应用#)*#)#)+!""&C,"XCE#.)A Copyright©博看网 . All Rights Reserved.,A!第#期杨!鹏#等$基于非线性干扰观测器的机械臂终端滑模控制(E)!Y6e(VU$#aG(V f(.G>9L:781:@9R1<:%@M:@9<J723215@9&21:[%@J<%2:@%&[7:0@%Z5S:<%I L12S9:%@\%@@%Z%:I927L5&9:%@S(-).(15@9&<%I L5:72392>9LL&7<9:7%2S#)*#C#)D!)"&")"X",C.(")!于靖#陈谋#姜长生.基于干扰观测器的非线性不确定系统自适应滑模控制(-).控制理论与应用#)*#E#,#!A"& ++,X+++.(C)!Y T=(a T#H G]]G(Y=d-#V G aP T_e UU-#1:9&.G2%2&7219@>7S:5@Z92<1%ZS1@81@\%@@%Z%:7<I927L5&9:%@S(-).^===:@92S B9<:7%2S%272>5S:@79&1&1<:@%27<S#)***#ED!E"&+,)X+,A.(D)!?e T G??G d^G#P G$G b e]^?#?G_h6=/T-#1:9&.(%2&7219@>7S:5@Z92<1%ZS1@81@>1S732\%@@%Z%:7<I927L5&9:%@S(-).Y%2:@%&1237211@723L@9<:7<1#)*#,#)#!,"&)",X)CD.(A)!Y T6/f#Y6^-#;6(FY.F544M9>9L:781>7S:5@Z92<1B%ZS1@81@B Z9S1>@%Z5S::@9<J723<%2:@%&%\1&1<:@7<9&&M>@7812\@11B\&%9:723S L9<1I927L5&9:%@(-).^===S M S:1I S R%5@29&#)*#E#A!)"&,E,X,").(+)!H e6G b_^FF.P@9R1<:%@M:@9<J723<%2:@%&5S72381&%<7:M%ZS1@81@92>>7S:5@Z92<1S%ZS1@81@\%@52<1@:972@%Z%:I927L5&9:%@S[7:0B %5::9<0%I1:1@S(-).?1<<927<9#)*#D#")!E Q""&AC#X AD".(#*)]^;T#d6TH#]^(g/.F727:1B:7I1<%2S12S5S9&3%@7:0I\%@I5&:7B9312:S M S:1I S[7:0>%5Z&1B72:13@9:%@>M29I7<S(-).G5:%I9:B 7<9#)*#,#ED!A"&#D*C X#D#).(##)aG(Vg#]^;#;T^U.d7S:@7Z5:1>\727:1B:7I1<%2:972I12:<%2:@%&\%@>%5Z&1B72:13@9:%@I5&:79312:S M S:1I S(-).^===:@92S9<:7%2S %2<M Z1@21:7<S#)*#E#EE!+"&#"#A X#")A.(#))f6;T#f6g T#;T^_^(/G d=T H#1:9&.Y%2:725%5S\727:1B:7I1<%2:@%&\%@@%Z%:7<I927L5&9:%@S[7:0:1@I729&S&7>723I%>1 (-).G5:%I9:7<9#)**"#E#!##"&#+"D X#+CE.(#,)b G(VT H#aG(V-T.G>9L:781<%2:@%&%\"d e F5LL1@B&7I Z1‘%S J1&1:%2@%Z%:[7:07I L@%81>S9\1:M(-).^;G:@92S9<:7%2S# )*#,#")!C"&AEE X A",.3<B@(:4?F?(C(:)P9C<89:;B9?H9B S959;(E P4:(T D?4;9B K(;NR9:?(:<4B!(>;D B54:E<"5><B Q<Bf G(VU123##)#aG(Vg79%40%5##)#aG(V-71##)#/T G(VV9%[17##)!#’)234454!$47"845)2;<72<:7=>7?;7<<8;7?#\<P<;&7;A<8B;"C4!Z<237454?C#Z;:7G;7,**#,*#$3;7:$ )’>7?;7<<8;7?+<B<:823$<7"<84!67"<55;?<7"+<3:P;5;":";47R<A;2<:7=R<"<2"Z<237454?C4!,;7;B"8C4!>=@2:";47#Z;:7G;7,**#,*#$3;7:"75>;B4E;&^2%@>1@:%@19&741:011\\1<:781<%2:@%&%\\781>13@11B%\B\@11>%I@%Z%:7<I927L5&9:%@72:01L@1S12<1%\>7S:5@Z92<1S#:01\%@I5&9:7%2%\9:1@I729&S&7>723I%>1<%2:@%&&1@Z9S1>%22%2&7219@>7S:5@ZB 92<1%ZS1@81@[9S L@%L%S1>.P0@%530S1&1<:723S57:9Z&12%2&7219@3972\52<:7%2#:01>7S:5@Z92<1%ZS1@81@ <%5&>1S:7I9:1:0152J2%[2>7S:5@Z92<1S9<<5@9:1&M#S%9S:%<%I L12S9:1\%@:01<%2:@%&&1@92>@1>5<1:01 <09::1@723%\:01S&7>723I%>1<%2:@%&.Y%281@312<1S L11>%\:01S M S:1I[9S9<<1&1@9:1>>51:%:01>1S732 %\92%2S7235&9@\9S::1@I729&S&7>723I927\%&>#[07<0359@92:11>:09::01:@9R1<:%@M:@9<J7231@@%@<%2B 81@31>72\727:1:7I1.P01S:9Z7&7:M%\:01<&%S1>B&%%L S M S:1I[9S L@%81>ZM]M9L52%8I1:0%>#92>:011\B \1<:78121S S%\:01L@%L%S1>S<01I1[9S81@7\71>ZM25I1@7<9&S7I5&9:7%2@1S5&:S.J<G K9B C>&@%Z%:7<I927L5&9:%@$:@9R1<:%@M:@9<J723$:1@I729&S&7>723I%>1$>7S:5@Z92<1%ZS1@81@!责任编辑&孔!薇"Copyright©博看网 . All Rights Reserved.。