最新激光遥感数据处理实验报告
- 格式:doc
- 大小:1.95 MB
- 文档页数:20
一、实习背景随着遥感技术的不断发展,遥感影像数据在资源调查、环境监测、城市规划等领域发挥着越来越重要的作用。
为了使同学们更好地掌握遥感影像数据处理方法,提高实际操作能力,本次实习课程以遥感影像数据为研究对象,通过实践操作,使学生了解遥感影像数据的处理流程,掌握遥感影像处理软件的使用方法。
二、实习目的1. 熟悉遥感影像数据的处理流程;2. 掌握遥感影像处理软件(如ENVI、ArcGIS等)的使用方法;3. 学会遥感影像数据的预处理、增强、分类等基本操作;4. 培养学生独立解决问题的能力,提高实际操作水平。
三、实习内容1. 遥感影像数据预处理遥感影像数据预处理是遥感影像处理的基础,主要包括辐射校正、几何校正、大气校正等。
(1)辐射校正:通过对遥感影像进行辐射校正,消除传感器噪声、大气辐射等因素对影像的影响,提高影像质量。
(2)几何校正:通过对遥感影像进行几何校正,消除由于传感器倾斜、地球曲率等因素引起的几何畸变,使影像与实际地理坐标相对应。
(3)大气校正:通过对遥感影像进行大气校正,消除大气对遥感影像的影响,提高影像的清晰度。
2. 遥感影像数据增强遥感影像数据增强是提高遥感影像质量的重要手段,主要包括对比度增强、锐化、滤波等。
(1)对比度增强:通过对遥感影像进行对比度增强,使影像中地物特征更加明显,便于后续处理。
(2)锐化:通过对遥感影像进行锐化处理,使影像中的地物边缘更加清晰,提高影像的视觉效果。
(3)滤波:通过对遥感影像进行滤波处理,消除影像中的噪声,提高影像质量。
3. 遥感影像数据分类遥感影像数据分类是将遥感影像中的地物进行分类,提取所需信息的过程。
常用的分类方法有监督分类、非监督分类等。
(1)监督分类:根据已知的地物特征,建立分类模型,对遥感影像进行分类。
(2)非监督分类:根据遥感影像自身特征,自动将遥感影像进行分类。
四、实习步骤1. 收集遥感影像数据:从遥感影像数据库中下载或获取所需的遥感影像数据。

遥感图像处理实验报告班级姓名学号实验室成绩评定教师签字专题一: DEM图像进行彩色制图(叙述制图过程并把自己处理结果加载到本文档里)实验目的:1.实验步骤:2.选择File > Open Image File>bhdemsub.img,出现由主图像窗口、滚动窗口和缩放窗口组成的ENVI 图像。
3.选择主图像窗口内的功能菜单Tools>Color Maping>Density Slice, 出现Density Slice对话框。
4.选择Clear Ranges, 清除Defined Density Slice Ranges下的内容。
5.选择Options>Add New Ranges, 其中RangeStart: 1219 ;Range End;1701;#of Ranges:10。
在Density Slice对话框中Defined Density Slice Ranges下出现十组内容。
6.逐个组将Red条依次改为25, 50, 75, 100, 125, 150, 175, 200, 225, 250。
Greeen与Blue不变。
选择Apply按钮, 主图像窗口、滚动窗口和缩放窗口组成的ENVI图像的颜色改变。
选择主图像窗口内的功能菜单File>Save Image As> Image File 出现Output Dispiay to Image File对话框, Output File Type选择JPEG, Enter Output Filename选择保存位置, Compression Facter(0-1)选择0.750.实验结果:专题二: TM与SPOT数据融合(叙述该过程并处理结果加载到本文档里。
注意用两种方法融合的过程)实验目的:1. 进行快速对比度拉伸、直方图执行交互式对比度拉伸和直方图匹配的操作2. 快速滤波、滤波的操作3. ENVI中变换(Transform)菜单功能的了解实验步骤:1. 选择File > Open Image File>Lon.spot文件,点击No Display>new display>load band2. 选择File > Open Image File>Lon.tm文件,点击No Display>new display>load band3. 选择Basic Tools>Resize Data>选择Lon.tm文件>点击OK(弹出对话框, 分别填写内容)4. 选择Basic Tools>Stretch实验结果:专题三: 航片的配准与镶嵌(叙述该过程并处理结果加载到本文档)1配准●图像-图像地面控制点 (Select GCPs: Image-to-Image)●图像-图像配准需要两幅图像均打开。
一、实习背景随着科技的不断发展,遥感技术在我国得到了广泛应用。
激光遥感作为一种新型的遥感技术,具有高精度、高分辨率、高分辨率率等特点,在地质勘探、环境监测、城市规划等领域具有广泛的应用前景。
为了更好地了解激光遥感技术,提高自己的专业技能,我于2021年暑假期间,参加了某激光遥感技术公司的实习项目。
二、实习目的1. 了解激光遥感的基本原理、技术流程和实际应用。
2. 掌握激光遥感数据处理、分析和应用方法。
3. 提高自己的实际操作能力,为今后从事相关工作打下基础。
4. 增强团队协作意识,提高自己的综合素质。
三、实习内容1. 激光遥感基本原理及技术流程(1)激光遥感原理:激光遥感是利用激光束对目标进行探测,通过分析激光回波信号获取目标信息的技术。
激光具有方向性好、能量集中、波长可调等优点,使得激光遥感在探测精度和分辨率方面具有明显优势。
(2)激光遥感技术流程:激光遥感技术流程主要包括激光发射、激光回波接收、信号处理、数据分析和应用等环节。
2. 激光遥感数据处理(1)数据预处理:包括激光雷达数据的几何校正、辐射校正、大气校正等。
(2)数据融合:将不同传感器、不同时间、不同分辨率的数据进行融合,提高数据质量。
(3)特征提取:从激光雷达数据中提取目标信息,如地形、植被、建筑物等。
3. 激光遥感数据分析与应用(1)地形分析:利用激光雷达数据获取地形高程、坡度、坡向等信息,进行地形分析。
(2)植被分析:利用激光雷达数据获取植被高度、覆盖度、生物量等信息,进行植被分析。
(3)建筑物分析:利用激光雷达数据获取建筑物高度、面积、形状等信息,进行建筑物分析。
4. 实际项目应用在实习过程中,我参与了以下实际项目:(1)某城市地形地貌调查:利用激光雷达数据获取该城市地形高程、坡度、坡向等信息,为城市规划提供依据。
(2)某地区植被覆盖度调查:利用激光雷达数据获取该地区植被高度、覆盖度、生物量等信息,为环境监测提供数据支持。
(3)某建筑物三维建模:利用激光雷达数据获取建筑物高度、面积、形状等信息,为建筑设计提供参考。
实验一、典型地物的光谱反射特征一、实验目的熟悉ENVI软件提供的各种光谱库,针对五种典型地物:雪、植被、水体、土壤、矿物岩石,通过绘制地物的反射光谱特性曲线,说明典型地物的反射光谱特性,并分别比较属于同一大类但处于在不同状态下的地物反射光谱特性。
二、实验数据与原理数据:ENVI自带的波谱库。
原理:入射到物体表面的电磁波与物体发生三中作用:反射、吸收和投射。
不同地物的反射、投射和吸收能力不同,既地物的波普特性。
遥感传感器能够记录地物本身发射的电磁波信息和地物反射太阳光的电磁波信息。
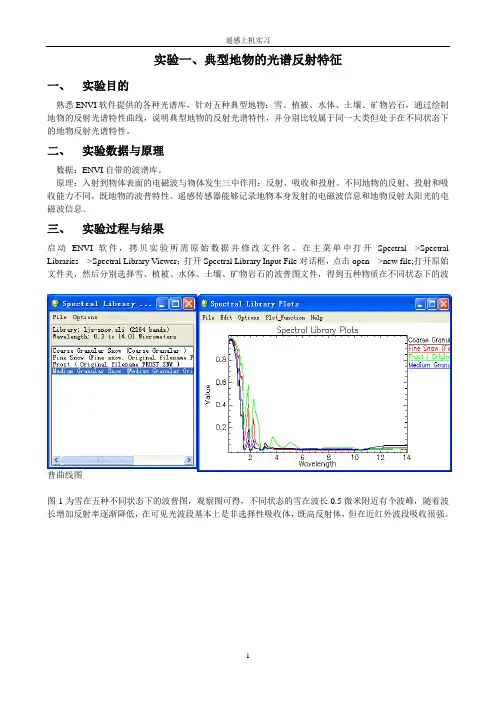
三、实验过程与结果启动ENVI软件,拷贝实验所需原始数据并修改文件名。
在主菜单中打开Spectral--->Spectral Libraries--->Spectral Library Viewer;打开Spectral Library Input File对话框,点击open--->new file;打开原始文件夹,然后分别选择雪、植被、水体、土壤、矿物岩石的波普图文件,得到五种物质在不同状态下的波普曲线图图1为雪在五种不同状态下的波普图,观察图可得,不同状态的雪在波长0.5微米附近有个波峰,随着波长增加反射率逐渐降低,在可见光波段基本上是非选择性吸收体,既高反射体,但在近红外波段吸收很强。
图2为三种植物的波普反射曲线,三种植物分别为confier(针叶树)、decidous(落叶植物)、grass(草)。
观察图可看出在可见光波段0.55微米(绿光)附近的反射率较低,10%~20%左右,两侧0.45微米(蓝光)和0.67微米(红光)则有两个吸收带。
在近红外波段1.2~1.5微米件有一个反射的陡坡,至1.6微米附近有一峰值在2~3微米件吸收率大增,反射率大大下降图(3)绘出了纯净水、海水的波普曲线,观察图可得出水在波长1微米左右的反射率较高,近红外波段的反射率很低。
四、实验体会不同的地物一般有不同的反射率,根据此原理可以区分不同的地物。
实习报告:遥感影像数据处理与分析一、实习目的本次遥感影像数据实习旨在通过实际操作,掌握遥感影像数据的处理、分析和应用方法,提高对遥感技术的理解和应用能力。
通过实习,要求学生能够熟练使用遥感影像处理软件,对遥感影像进行预处理、信息提取和分类,并能够根据实际需求进行遥感影像的分析和应用。
二、实习内容(一)遥感影像预处理本次实习所使用的遥感影像数据为Landsat 8卫星影像,首先需要对影像进行预处理,包括辐射定标、大气校正和地理校正等。
预处理的目的是消除遥感影像中由于大气、传感器等非目标因素引起的影响,提高影像的可用性和分析精度。
(二)遥感影像信息提取在预处理的基础上,需要对遥感影像进行信息提取,包括水体、植被、建筑用地等土地利用类型的提取。
信息提取的方法包括基于像元的分类方法和基于对象的分类方法。
通过比较不同分类方法的准确性,选择合适的分类方法进行实习任务的需求。
(三)遥感影像分类与分析对遥感影像进行分类是为了将影像中的不同地物类型进行区分,便于后续的分析和应用。
分类的方法包括监督分类、无监督分类和混合像元分解等。
在分类的基础上,可以对不同地物类型的分布、变化等进行分析,为实际应用提供依据。
(四)遥感影像应用在遥感影像分类和分析的基础上,可以进行遥感影像的应用,例如土地利用变化监测、生态环境监测等。
通过实际应用,可以进一步理解遥感影像数据的价值和应用前景。
三、实习步骤与方法(一)遥感影像预处理1. 辐射定标:将遥感影像的数字量化值(DN)转换为反射率或辐射率。
2. 大气校正:消除大气对遥感影像的影响,提高地物反射率的准确性。
3. 地理校正:纠正遥感影像的几何变形,使影像坐标与实际地理坐标对应。
(二)遥感影像信息提取1. 基于像元的分类:通过设置不同的阈值,将遥感影像中的像素分为不同的类别。
2. 基于对象的分类:利用遥感影像分割技术,将影像中的不同地物分为对象,并进行分类。
(三)遥感影像分类与分析1. 监督分类:利用已知类别的样本数据,训练分类器,对遥感影像进行分类。

第1篇一、实验背景随着遥感技术的飞速发展,其在环境监测、资源调查、城市规划等多个领域发挥着越来越重要的作用。
本次实验旨在通过遥感图像处理与分析,了解遥感技术在环境监测中的应用,提高我们对遥感图像的理解和解读能力。
二、实验目的1. 掌握遥感图像的基本处理方法;2. 分析遥感图像在环境监测中的应用;3. 提高遥感图像的解读与分析能力;4. 通过实验反思,总结经验与不足。
三、实验原理遥感技术是利用电磁波对地球表面进行观测的一种手段。
通过遥感图像,我们可以获取地表的各种信息,如地形、地貌、植被、水文等。
本次实验主要运用遥感图像处理与分析技术,对遥感图像进行预处理、增强、分类、提取等操作,以实现对地表信息的提取与分析。
四、实验步骤1. 数据准备:收集实验所需的遥感图像数据,包括多时相、不同分辨率的遥感图像。
2. 图像预处理:对遥感图像进行辐射校正、几何校正等预处理,提高图像质量。
3. 图像增强:对预处理后的遥感图像进行增强处理,突出感兴趣区域的特征。
4. 图像分类:运用监督或非监督分类方法,对遥感图像进行分类,提取地表信息。
5. 图像分析:对分类后的遥感图像进行分析,了解地表信息变化规律。
五、实验结果1. 通过图像预处理,提高了遥感图像的质量,为后续分析提供了更好的数据基础。
2. 图像增强处理后,明显提高了感兴趣区域的特征,便于后续分析。
3. 通过分类方法,成功提取了地表信息,如植被、水域、建设用地等。
4. 对分类后的遥感图像进行分析,发现地表信息变化规律,为环境监测提供了有力支持。
六、实验反思1. 在实验过程中,发现遥感图像预处理对后续分析至关重要。
在预处理过程中,要注意选择合适的校正方法和参数,以确保图像质量。
2. 图像增强方法的选择应根据具体实验目的和图像特点进行。
在本实验中,直方图均衡化方法取得了较好的效果。
3. 分类方法的选择对地表信息提取结果有很大影响。
在本次实验中,支持向量机(SVM)分类方法取得了较好的分类效果。
最新《遥感技术》实验报告实验目的:本实验旨在通过实际操作,加深对遥感技术基本原理的理解,并掌握遥感数据的获取、处理与分析方法。
通过实验,学习如何利用遥感技术进行地表覆盖分类、资源评估和环境监测。
实验内容:1. 遥感数据的获取与预处理- 从国家遥感中心或其他数据平台下载适用于实验的遥感影像数据。
- 对下载的遥感影像进行必要的预处理,包括辐射校正、大气校正和几何校正。
2. 遥感影像的解译与分类- 利用遥感影像解译软件,如ENVI或ERDAS IMAGINE,对预处理后的影像进行目视解译。
- 采用非监督分类和监督分类方法,对遥感影像中的地表覆盖类型进行分类。
3. 分类结果的精度评估- 通过实地调查或其他高精度数据,收集地面真实情况作为参考。
- 利用混淆矩阵等统计工具,对遥感分类结果进行精度评估。
4. 遥感技术在资源评估和环境监测中的应用- 选取特定区域,运用遥感技术进行植被覆盖度、土壤湿度等环境因子的监测。
- 分析遥感监测数据,评估资源状况和环境变化趋势。
实验结果:通过本次实验,成功获取并预处理了所需遥感影像数据。
在解译与分类阶段,非监督分类结果显示了地表覆盖的大致分布,而监督分类则提供了更为精确的分类结果。
精度评估表明,监督分类的总体精度达到了85%。
在资源评估和环境监测应用中,遥感技术能够有效地监测到植被覆盖度的季节性变化和土壤湿度的空间分布情况。
结论:实验验证了遥感技术在地表覆盖分类、资源评估和环境监测中的有效性和实用性。
通过本次实验,不仅提高了对遥感技术操作的熟练度,也为后续相关研究提供了实验基础和技术支持。
未来的工作可以进一步探索更先进的分类算法和数据分析方法,以提高遥感应用的精度和效率。
第1篇一、实验目的本次实验旨在通过遥感技术,分析特定区域的生态环境、土地利用变化以及灾害影响等方面,提高对遥感数据解读和分析的能力,为相关领域的决策提供科学依据。
二、实验原理遥感技术是利用航空、航天等平台获取地表信息的一种手段,通过对遥感图像的处理和分析,可以获取地表的物理、化学、生物等信息。
本实验主要涉及以下原理:1. 遥感图像的获取:通过卫星、航空等平台获取特定区域的遥感图像。
2. 遥感图像预处理:对遥感图像进行辐射校正、几何校正等预处理,提高图像质量。
3. 遥感图像分析:利用遥感图像处理软件对遥感图像进行分类、变化检测、纹理分析等分析,提取地表信息。
4. 影响分析:结合相关领域知识,对分析结果进行解释和评价,揭示地表现象的成因和影响。
三、实验数据本次实验选用某区域2010年和2020年的遥感影像数据,包括多光谱、全色等数据。
四、实验步骤1. 数据预处理:- 对遥感影像进行辐射校正,消除大气、传感器等因素的影响。
- 对遥感影像进行几何校正,消除图像畸变。
- 对遥感影像进行裁剪,提取研究区域。
2. 遥感图像分析:- 利用遥感图像处理软件对遥感影像进行分类,提取地表信息,如土地利用类型、植被覆盖度等。
- 对遥感影像进行变化检测,分析研究区域土地利用变化情况。
- 对遥感影像进行纹理分析,揭示地表现象的分布特征。
3. 影响分析:- 结合相关领域知识,对分析结果进行解释和评价。
- 分析研究区域生态环境、土地利用变化以及灾害影响等方面的成因和影响。
五、实验结果与分析1. 土地利用变化:- 通过变化检测,发现研究区域在2010年至2020年间,耕地、林地、草地等土地利用类型发生了显著变化。
- 具体表现为:耕地面积减少,林地、草地面积增加。
2. 植被覆盖度:- 通过植被指数分析,发现研究区域植被覆盖度总体呈上升趋势,表明生态环境有所改善。
3. 灾害影响:- 通过遥感影像分析,发现研究区域在2010年至2020年间,受洪涝、干旱等灾害影响较大。
第1篇一、实验目的本次实验旨在通过实践操作,了解遥感监控技术的原理和应用,掌握遥感图像的获取、处理和分析方法,提高对遥感数据的理解和运用能力。
二、实验原理遥感监控技术是利用遥感平台(如卫星、飞机等)获取地表信息,通过图像处理和分析技术,实现对地表物体的监测和评估。
实验主要涉及以下原理:1. 遥感成像原理:遥感平台通过搭载的传感器,接收地表反射或辐射的电磁波,形成遥感图像。
2. 图像处理技术:对遥感图像进行增强、滤波、分割等处理,提高图像质量和信息提取能力。
3. 地理信息系统(GIS):将遥感图像与地理信息相结合,进行空间分析和可视化。
三、实验内容1. 遥感图像获取:利用卫星遥感数据,获取实验区域的遥感图像。
2. 图像预处理:对遥感图像进行几何校正、辐射校正等预处理,提高图像质量。
3. 图像增强:通过对比度增强、亮度增强等方法,提高图像的视觉效果。
4. 图像分割:利用阈值分割、区域生长等方法,将图像分割成不同的地物类别。
5. 地物分类:根据地物特征,利用监督分类或非监督分类方法,对地物进行分类。
6. 空间分析:利用GIS软件,对遥感图像进行空间分析,如面积计算、距离测量等。
四、实验步骤1. 数据准备:下载实验区域遥感图像数据,包括原始图像和地理信息数据。
2. 图像预处理:使用遥感图像处理软件,对图像进行几何校正和辐射校正。
3. 图像增强:根据实验需求,对图像进行对比度增强或亮度增强。
4. 图像分割:选择合适的分割方法,对图像进行分割。
5. 地物分类:根据实验要求,选择监督分类或非监督分类方法,对地物进行分类。
6. 空间分析:利用GIS软件,对遥感图像进行空间分析,如面积计算、距离测量等。
五、实验结果与分析1. 遥感图像预处理:通过几何校正和辐射校正,提高了图像质量和信息提取能力。
2. 图像增强:对比度增强和亮度增强方法,提高了图像的视觉效果,有利于后续地物分类。
3. 图像分割:采用阈值分割和区域生长方法,将图像分割成不同的地物类别。
第1篇一、引言遥感技术作为一门新兴的地球观测技术,具有广泛的应用前景。
通过遥感手段,我们可以获取地球表面的大量信息,为资源调查、环境监测、灾害预警等领域提供科学依据。
本报告旨在通过一次遥感实践,总结遥感技术的应用过程、成果及心得体会。
二、实践背景随着我国经济社会的快速发展,对地球资源的调查、环境监测和灾害预警等方面的需求日益增长。
遥感技术凭借其独特的优势,成为解决这些问题的重要手段。
本次实践旨在通过遥感技术对某一片区域进行资源调查和环境监测,为相关部门提供决策依据。
三、实践内容1. 数据采集本次实践采用多源遥感数据,包括卫星遥感影像、航空遥感影像和无人机遥感影像。
数据采集过程如下:(1)卫星遥感影像:选取高分一号、高分二号等卫星影像,通过遥感数据服务平台获取影像数据。
(2)航空遥感影像:联系相关单位获取航空遥感影像,包括影像分辨率、拍摄时间等信息。
(3)无人机遥感影像:利用无人机搭载高分辨率相机,对目标区域进行飞行拍摄。
2. 数据预处理为了提高遥感数据的可用性,对采集到的数据进行预处理,包括以下步骤:(1)影像校正:对卫星遥感影像和航空遥感影像进行几何校正,消除影像畸变。
(2)辐射校正:对影像进行辐射校正,消除大气、传感器等因素对影像的影响。
(3)图像融合:将不同分辨率、不同时相的遥感影像进行融合,提高数据质量和信息丰富度。
3. 数据分析通过对预处理后的遥感数据进行分析,获取目标区域的资源信息和环境状况。
具体分析如下:(1)土地资源调查:利用遥感影像,提取土地利用类型、土地覆盖度等信息,为土地资源调查提供数据支持。
(2)植被覆盖度监测:利用遥感影像,计算植被覆盖度,为生态环境监测提供依据。
(3)水体信息提取:通过遥感影像,识别水体分布,为水资源管理提供数据支持。
(4)灾害预警:利用遥感影像,监测地质灾害、森林火灾等灾害信息,为灾害预警提供数据支持。
4. 结果展示将分析结果以图表、地图等形式进行展示,便于相关部门直观了解目标区域的资源、环境状况和灾害风险。
遥感实验报告20231. 引言遥感技术是一种通过无人机、卫星等遥感设备获取地球表面信息的技术。
它在地质勘探、农林业生产、环境监测等领域具有重要应用价值。
本实验旨在通过遥感技术获取、处理和分析遥感数据,以提供对地球表面特征的详细描述。
2. 实验目的本实验的主要目的是学习和掌握常见的遥感数据处理和分析方法,包括遥感图像的获取、预处理、特征提取等。
通过实践,了解遥感技术在不同领域的应用,并探索其未来的发展前景。
3. 实验步骤3.1 数据获取本实验使用MODIS卫星遥感数据作为实验数据。
通过访问NASA的遥感数据下载网站,获取所需的MODIS影像数据。
选择合适的地区和时间范围,下载相应的遥感数据。
3.2 数据预处理在进行遥感数据分析之前,需要对数据进行预处理。
预处理的主要目的是去除噪声、校正数据以及增强数据质量。
本实验使用ENVI软件进行数据预处理。
首先,导入下载的MODIS影像数据,并进行大气校正和辐射校正,以消除大气光和辐射效应对图像的影响。
接下来,进行地物分类和特征提取。
使用ENVI软件的图像分类和特征提取工具,对遥感影像进行分类,并提取出感兴趣的特征信息。
3.3 数据分析在经过数据预处理后,我们可以对遥感数据进行进一步的分析。
首先,进行遥感图像的可视化展示。
使用ENVI软件的图像显示工具,将预处理后的遥感影像进行可视化展示,以便更直观地观察地表特征。
接着,进行遥感数据的统计分析。
使用ENVI软件的图像统计工具,对影像数据进行统计分析,如计算平均值、标准差等。
最后,进行地表特征分析。
根据预处理后的遥感影像,对地表特征进行分析和解释。
比较不同地区、不同时间段的遥感影像,找出地球表面特征的变化和规律。
4. 实验结果通过对遥感数据的获取、预处理和分析,我们得到了以下实验结果:1.成功获取了所需的MODIS卫星遥感数据,并进行了数据预处理。
2.在预处理后的遥感影像中,清晰显示了地球表面的特征,包括水体、植被、建筑物等。
第1篇一、实验背景与目的随着遥感技术的不断发展,遥感影像已成为获取地球表面信息的重要手段。
遥感影像处理是对遥感影像进行一系列技术操作,以提高影像质量、提取有用信息的过程。
本实验旨在通过实践操作,让学生掌握遥感影像处理的基本原理和常用方法,提高学生对遥感影像数据的应用能力。
二、实验内容与步骤本次实验主要包括以下内容:1. 数据准备:获取实验所需的遥感影像数据,包括光学影像、红外影像等。
2. 影像预处理:对原始遥感影像进行辐射校正、几何校正、图像增强等处理。
3. 影像分割:对预处理后的影像进行分割,提取感兴趣的目标区域。
4. 影像分类:对分割后的影像进行分类,识别不同的地物类型。
5. 结果分析:对分类结果进行分析,评估分类精度。
三、实验步骤1. 数据准备- 获取实验所需的遥感影像数据,包括光学影像、红外影像等。
- 确保影像数据具有较好的质量和分辨率。
2. 影像预处理- 辐射校正:对原始遥感影像进行辐射校正,消除大气、传感器等因素对影像辐射强度的影响。
- 几何校正:对原始遥感影像进行几何校正,消除地形起伏、地球曲率等因素对影像几何形状的影响。
- 图像增强:对预处理后的影像进行图像增强,提高影像对比度、清晰度等。
3. 影像分割- 选择合适的分割方法,如基于阈值分割、基于区域生长分割、基于边缘检测分割等。
- 对预处理后的影像进行分割,提取感兴趣的目标区域。
4. 影像分类- 选择合适的分类方法,如监督分类、非监督分类等。
- 对分割后的影像进行分类,识别不同的地物类型。
5. 结果分析- 对分类结果进行分析,评估分类精度。
- 分析分类结果中存在的问题,并提出改进措施。
四、实验结果与分析1. 影像预处理结果- 经过辐射校正、几何校正和图像增强处理后,遥感影像的质量得到显著提高,对比度、清晰度等指标明显改善。
2. 影像分割结果- 根据实验所采用的分割方法,成功提取了感兴趣的目标区域,分割效果较好。
3. 影像分类结果- 通过选择合适的分类方法,对分割后的影像进行分类,成功识别了不同的地物类型。
实验名称:遥感图像处理与分析实验时间:2023年4月10日实验地点:遥感实验室一、实验目的1. 掌握遥感图像的获取、处理和分析方法。
2. 学习遥感图像处理软件的使用。
3. 培养学生运用遥感技术解决实际问题的能力。
二、实验原理遥感技术是利用航空、航天等手段,获取地球表面信息的一种技术。
遥感图像处理与分析是遥感技术的重要组成部分,主要包括图像预处理、图像增强、图像分类、图像融合等。
本实验以遥感图像处理与分析为主要内容,通过实验掌握遥感图像处理的基本方法。
三、实验内容1. 遥感图像获取:获取一幅遥感图像,了解遥感图像的基本特征。
2. 遥感图像预处理:对遥感图像进行辐射校正、几何校正、大气校正等预处理操作。
3. 遥感图像增强:对遥感图像进行对比度增强、亮度增强、滤波等操作。
4. 遥感图像分类:采用监督分类和非监督分类方法对遥感图像进行分类。
5. 遥感图像融合:将多源遥感图像进行融合,提高图像质量。
四、实验步骤1. 实验准备:准备遥感图像处理软件、遥感图像数据等。
2. 遥感图像获取:从遥感图像数据库中获取一幅遥感图像。
3. 遥感图像预处理:a. 辐射校正:利用遥感图像的辐射校正公式,对遥感图像进行辐射校正。
b. 几何校正:利用遥感图像的几何校正公式,对遥感图像进行几何校正。
c. 大气校正:利用遥感图像的大气校正模型,对遥感图像进行大气校正。
4. 遥感图像增强:a. 对比度增强:采用直方图均衡化方法对遥感图像进行对比度增强。
b. 亮度增强:采用线性变换方法对遥感图像进行亮度增强。
c. 滤波:采用中值滤波、高斯滤波等方法对遥感图像进行滤波。
5. 遥感图像分类:a. 监督分类:选择训练样本,建立分类模型,对遥感图像进行分类。
b. 非监督分类:采用ISODATA、K-means等方法对遥感图像进行非监督分类。
6. 遥感图像融合:a. 选择合适的融合方法,如主成分分析(PCA)、小波变换等。
b. 对多源遥感图像进行融合,得到融合图像。
激光遥感实习报告一、实习背景与目的近年来,随着科技的飞速发展,激光遥感技术在地质、环境、农业等领域得到了广泛的应用。
为了更好地了解激光遥感技术的原理及其在实际工程中的应用,我参加了为期一个月的激光遥感实习。
本次实习旨在提高我对激光遥感技术的认识,培养我实际操作能力,为今后的科研和工作打下基础。
二、实习内容与过程实习期间,我主要参与了以下几个方面的内容:1. 激光遥感技术原理学习:通过阅读相关文献和教材,了解了激光遥感技术的原理、分类及优缺点。
掌握了激光雷达、激光扫描仪等激光遥感设备的工作原理及其在地理信息系统(GIS)中的应用。
2. 实习设备操作与实践:在导师的指导下,我学会了操作激光遥感设备,并进行了实地测量。
通过对测量数据的处理和分析,掌握了激光遥感数据的精度评价、去噪声、数据拼接等基本技能。
3. 激光遥感应用案例分析:通过研究典型激光遥感应用案例,了解了激光遥感技术在地质勘探、植被监测、城市规划等领域的应用。
学会了将激光遥感数据与GIS、遥感图像等其他数据进行融合,从而提高数据处理和分析的准确性。
4. 实习成果整理与汇报:在实习结束后,我对所学的知识和技能进行了总结,撰写了实习报告,并在实习总结会议上进行了汇报。
三、实习收获与反思通过本次实习,我对激光遥感技术有了更深入的了解,收获如下:1. 理论知识:掌握了激光遥感技术的基本原理、分类、优缺点及其在各个领域的应用。
2. 实际操作能力:学会了操作激光遥感设备,并能够对测量数据进行处理和分析。
3. 数据处理技能:掌握了激光遥感数据的精度评价、去噪声、数据拼接等基本技能。
4. 团队协作与沟通:在实习过程中,我与同学们共同解决问题,提高了团队协作和沟通能力。
反思:在实习过程中,我发现自己在理论知识和实际操作之间存在一定的差距。
今后,我将继续努力学习,提高自己的综合能力,为将来的科研和工作做好准备。
四、总结总之,本次激光遥感实习使我受益匪浅,不仅提高了我的理论知识,还锻炼了我的实际操作能力。
遥感实习报告内容1.分析几种典型地物的波谱曲线特征,依据此特征辨别TM影像样图的通道值,写出其辨别理由;(1)植被的波谱曲线特征:植被的反射波普曲线主要分三段:可见光波段0.4-0.76um 有一个小的反射峰,位置在0.5um绿处两侧蓝和红有两个吸收带,这一特征是由于叶绿素的影响。
叶绿素对蓝光和红光的吸收作用强,对绿光反射作用强。
近红外波段有一反射的陡坡到1.1um附近有一峰值形成植被的独有特征。
这是由于植被叶细胞结构的影响,除了吸收和透射的部分,形成的高反射率。
在中红外波段1.3-2.5 um受到绿色植物含水量的影响,吸收率大增,反射率大大下降,特别以1.45um 1.95 um2.7um为中心是水的吸收带形成低谷。
所以分析:根据植被的反射波谱曲线特征,T2与T3图在长江流域与汉江流域比较下,判断由于T3图两水域颜色区别较大,在植被的中T-3的反射率大于T-2,所以判断T2图可能处于TM1-TM2(0.45-0.60um之间)即蓝绿波段之间。
(2)水体的波普特征:水体的反射主要在蓝绿波段,其他波段吸收都很强。
特别到了近红外波段吸收就更强。
遥感影像上,特别是近红外影像上,水体呈黑色,一般情况下,水中含泥沙时,由于泥沙散射,光波段反射率会增加,峰值出现在黄红区,水中含叶绿素时,近红外波段明显抬升,这些都成为影像分析的重要依据。
分析:根据水体光谱特征,T5图中水体为黑色,T5图的反射率大,判断为红外光,则T5图为TM5中红外波段(1.55-1.75UM)。
进一步根据水体和植物的反射波谱曲线得出T3图为TM3波段(0.62-0.69um)即为红光波段。
(3)土壤的光谱特征:土壤自然状态下反射率没有明显的峰值和谷值,一般来说土质越细反射率越高,有机质含量越高和含水量越高,反射率越低此外土类和肥力也会对反射率产生影响。
由于土壤反射波谱曲线呈比较平滑的特征,所以不同光谱段的遥感影像上土壤的亮度区别不明显。
分析:又因为T4图与T5图比较,图像的江水较T5图来说发白,即江水的反射率应该增高,另外该图的植被比T5图更白,反射率更高,故而应该在植被的反射峰附近所以T4图为0.70—0.90um之间,即为TM4近红外波段。
郑州大学水利与环境学院遥感技术实验报告(适用于地理信息系统专业)专业班级: ***********学生姓名: *******学生学号: ***********指导教师: ******实验成绩:***年***月实验一、遥感图像认知与输入/输出的基本操作一、实验要求1.了解遥感卫星数字影像的差异。
2.掌握查看遥感影像相关信息的基本方法。
3.掌握遥感图像处理软件ERDAS的基本视窗操作及各个图标面板的功能。
4.了解遥感图像的格式,学习将不同格式的遥感图像转换为ERDASimg格式,以及将ERDASimg 格式转换为多种指定的格式图像。
5.学习如何输入单波段数据以及如何将多波段遥感图像进行波段组合。
6.掌握在ERDAS系统中显示单波段和多波段遥感图像的方法。
二、实验内容1.遥感图像文件的信息查询。
2.空间分辨率。
3.遥感影像纹理结构认知。
4.色调信息认知。
5.遥感影像特征空间分析。
6.矢量化。
7.遥感图像的格式。
8.数据输入/输出。
9.波段组合。
10.遥感图像显示。
三、实验结果及分析:简述矢量功能在ERDAS中的意义。
矢量功能可以将栅格数据转化为矢量数据。
矢量数据有很多优点:1.矢量数据由简单的几何图元组成,表示紧凑,所占存储空间小。
2.矢量图像易于进行编辑。
3.用矢量表示的对象易于缩放或压缩,且不会降低其在计算机中的显示质量。
四、实验结果及分析:简述不同传感器的卫星影像的特点和目视效果。
SPOT卫星最大的优势是最高空间分辨率达10m,并且SPOT卫星的传感器带有可以定向的发射镜,使仪器具有偏离天底点(倾斜)观察的能力,可获得垂直和倾斜的图像。
因而其重复观察能力由26天提高到1~5天,并在不同的轨道扫面重叠产生立体像对,可以提供立体观测地面、描绘等高线,进行立体绘图的和立体显示的可能性。
CBRES的轨道是太阳同步近极地轨道,轨道高度是778km,卫星的重访周期是26天,其携带的传感器的最高空间分辨率是19.5m。
1 TerraSolid软件认识一、实验目的与内容:1.目的安装MicroStation、TerraSolid软件,初步熟悉软件各个模块的功能。
2.内容软件安装与解密;了解各个功能模块的主要功能;熟练应用软件进行点云数据的基本操作;参考资料:Tscan0.pdf及视频。
二、实验过程:TerraSolid系列软件是第一套商业化的Lidar数据处理软件,基于MicroStation开发运行。
TerraSolid系列软件主要有TerraScan, TerraPhoto, TerraMatch,TerraModeler等模块来共同处理激光雷达点云数据和影像。
用户可以根据不同的需要选择不同的模块。
因此要先安装MicroStation。
1 软件的安装①安装MicroStation。
运行ms08050270en.exe,按照程序指示完成安装;②拷贝msv8.lic复制到C:\Program Files\Bentley\Program\Licensing文件夹下,完成MicroStation的解密;③再运行setup.exe,选择TerraScan, TerraPhoto, TerraMatch,TerraModeler四项完成四个模块的安装;④拷贝license目录下四个解密文件到C:\terra\license文件夹下,完成TerraSolid软件解密。
2 软件运行和加载①双击桌面快捷方式MicroStation,运行软件。
系统主界面如下图1所示。
②选择菜单Utilities→MDL Aplication,调出MDL对话框,如图2所示。
选择TSCAN,点击load按钮,完成TerraScan的加载。
同理可完成TerraPhoto, TerraMatch,TerraModeler3个模块的加载,然后进入各个模块的使用界面。
图1 MicroStation系统主界面图2 MDL对话框3、各个模块功能介绍Terrasolid系列由TerraScan、TerraModel、TerraPhoto、TerraSlave、TerraMatch、TerraSurvey等组成,来共同处理激光雷达点云数据和影像。
用户可以根据不同的需要选择不同的模块,一般最常用的就是TerraScan和TerraModel。
TerraScan能装载和处理大量的LIDAR数据,它的主要功能是根据点的坐标、强度、同一激光的首末反射值等信息将大量激光扫描测量数据进行分类、滤波。
它可以根据一定的分类标准程序对所有的点进行批处理。
另外它还可以象AutoCAD那样很方便地利用鼠标编辑图形,从不同角度观察图形。
但TerraScan软件仅有一个滤波器,采用的是基于坡度的滤波理念。
TerraMatch用于解决IMU飞行姿态参数,确定飞行姿态,用于系统检校/航带平差。
TerraModel是用来生成和处理各种表面模型的,可用于计算体积、面积,生成等高线、轮廓线,洪水淹没计算。
TerraPhoto用来处理原始数码影像。
将飞机的飞行数据文件(包括飞机位置、姿态、拍摄时间、影像排列等数据)、影像数据文件及地面数字模型文件输入系统,必要时还可以将外控数据输入系统,该软件将根据这些数据进行全自动空三平差、镶嵌,形成彩色正射影像图。
4、软件基本操作①数据读取与显示。
从TerraScan菜单栏选择File→Read Points即可打开选择文件选择对话框在数据目录双击s,点击Done按钮,软件将会读入数据,并在Microstation的View对数据进行显示②数据显示模式。
Viev→Display mode可对点云数据的不同显示模式进行查看。
可供选择的方式有:类、回波、高程、强度、距离、渲染等。
在Display mode中,可以对每个窗口的颜色以及显示方式进行设置,如下图所示:③General、ViewLaser工具箱2 机载LiDAR数据处理——系统检校一、实验目的及内容:1.实验目的:结合课程介绍系统检校原理,掌握基于软件进行系统检校的方法和步骤。
2.实验内容:在TerraMatch,模块下,进行系统检校。
二、实验过程:检校的最终目标是要确定所有的系统误差并对所求的原始点数据进行改正,使其只剩下随机误差。
对每次飞行需要检校的误差主要是安置误差,其随飞行的次数、时间以及仪器的安装等因素而变化。
1.打开数据:将实验数据中的四条航带点云数据打开,为明显区别可使四条航带显示不同的颜色,在Display mode进行设置。
同时,点击Draw Section按键,画出一定宽度的线,结果在View2中显示,可发现各个航带明显地存在偏差,这就是系统误差造成的,系统检校的目的就是消除这些误差。
结果如下图所示:2.加载TerraMatch,进行系统检校与加载TerraScan步骤相同,加载TerraMatch,开始系统检校。
系统检校的操作:1、导入轨迹文件。
选择左侧工具栏中的Setting→Manage Trajectories→File→Set directory,选择所用的数据文件,即完成了导入轨迹文件。
2、画航线。
在Manage Trajectories中,选择Tools→Draw Trajectories,则显示了航线。
3、在TerraMatch中,点击Setting→Measure match,在Use 中选择Loaded points,Use classes中选择Ground,完成后,则会显示Measure report,其中Average magnitude为0.09988。
4、开始进行航带平差,仍然在TerraMatch中,点击Setting→Find match,在solve for中,将Heading shift,Roll shift,Pitchshift三个选项划勾。
然后点OK,则开始系统检校,过程会显示如下界面:5、应用检校结果。
上述过程完成后,会出现Apply results,可以将这个结果保存,点击OK,则将结果应用在数据中,完成系统检校。
完成了系统后,可发现原来各个航带存在的偏差,会减小。
如图所示:如下图所示:3 机载LiDAR数据处理——滤波分类一、实验目的与内容:掌握软件滤波分类方法。
运用软件对点云数据进行滤波、分类。
二、实验方法与过程:1 实验方法:人工交互编辑的目的是剔除自动滤波,自动分类没有滤掉的部分粗查和未分类正确的激光点,为了便于人工作业,工程化的海量数据处理需要界面更友好、处理效率更高的选定工具和算法。
在对点云数据进行分类处理前,首先应当对数据进行检验,剔除错误的点和高程异常的点,如特别低的点(地面以下的点)或特别高的点(云或飞行中的鸟)。
然后建立地面数据类型,分离出非地面的数据。
再根据顾客的要求,对非地面数据进行分类,如建筑物类数据、输电线路数据、铁路类数据等等。
另外,可以根据高出地面的高度对非地面点数据进行分类,如可以对不同的植被进行分类。
最后输出分类的数据。
机载LiDAR 航飞获取的原始激光数据在经过数据预处理之后就是海量的激光点云数据,这些点云数据包括地面点、植被点、建筑物点、水域点、其他地物点以及噪声点,且都在同一个数据层。
激光点云数据分类就是要将这些点放在预先定义的数据层中,比如,地面点放在ground 层,植被点放在vegetation 层,建筑物点放在building 层等,其中重点是要分出地面点,从而生成DEM。
2 实验过程:激光点分类的主要流程如下:1、设置分类层。
根据数据后处理的需求设定不同的点层,并设置该层描述语、编号、颜色等显示信息。
2、提取噪声点。
主要是提取空中的像云和鸟等噪声点,这些点明显高于周围点的平均高程,但是其中很有可能把空中的电力线、通信线等也提取出来,所以,提取噪声点后要检查分类是否准确。
其原理是若中心点高于周围点的平均高程限差,则该点确定为噪声点。
3、提取低点。
这一步主要是提取因为多路径反射而产生的比实际点位低的错误点,其原理是给定一个点作为中心点,指定范围的点与其进行高程比较,若明显低于指定范围内的点,那么这个点被确定为低点。
4、提取地面点。
提取地面点是分类中最关键的一个步骤,主要是通过反复迭代建立地面三角网模型来分离出地面点。
在算法上包括两个阶段,第一,在分离出低点的基础上,软件在一定范围内搜寻初始地面点来建立一个初始模型,并在这些点之间构建临时的TIN 模型;第二,在原来初始模型的基础上,抬高模型,如果某些点和TIN 之间的角度和距离符合预设的参数,将会增加这些新的点到原来构建的TIN 模型中,每个增加的点使得模型越来越接近真实的地面。
也可以运用Micro滤波获取地面点:5、其他地物点。
地面以上地物点的提取是建立在地面模型基础上的,主要通过其高度来进行分类。
植被点和电力线点在根据高度分类之后,要人工分别区分开来。
建筑物点的分类由程序自动进行,再加以人工辅助修改。
一般情况下,机载激光用于扫描地形,水面反射接收到的激光点很少,所以,激光点很离散稀疏的就判断为水域,再参考影像来确定水域的形状边界等信息。
Add按钮→Add按钮→Add按钮→运行宏即可得到分类的植被点。
Add按钮→运行宏即可得到building类。
6、点云数据的交互编辑现有的软件尽管对点云数据可以进行大部分的自动分类处理,但是由于地面的复杂性和点云数据的随机性,自动处理算法无法保证完全的可靠性,因此自动分类完成后,对比较特殊及复杂的地形及目标,特别是陡坎、建筑物与树木交界处、植被以及水域等仍需要进行人工交互编辑。
在经过程序自动分类之后,还要进行人工辅助编辑修改完善等后续工作来使分类更精确。
可参照模型和影像来进行编辑修改,建立地面模型DEM 和表面模型DSM,两个模型比较来判断激光点的分类是否准确且贴合地形,不容易判断的区域参考影像来确定属于哪一类。
4 机载LiDAR数据处理——DEM生成一、实验目的和内容:掌握软件生成DEM的方法。
运用软件对地面点数据生成DEM产品。
二、实验方法和过程:上次实验通过滤波从激光点云数据分离出地面点,并把地面点放在ground 层,本次实验将利用地面点生成DEM。
⑴加载Tmodeler模块⑵利用TScan模块加载已滤波数据⑶⑷⑸5 地面三维激光扫描一、实验目的与内容运用三维激光扫描仪扫描建筑或者雕像,获取点云数据。
掌握对目标进行扫描的技术。
二、实验方法与过程:1 实验方法:地面三维激光扫描使用三维激光扫描系统。
三维激光扫描系统主要激光扫描仪、PC机、电源和三角架组成。
地面激光扫描仪本身主要包括激光测距系统和激光扫描系统,同时集成CCD 和仪器内部控制和校正系统。
激光三维扫描仪通过向物体表面发射激光束,以激光定位原理精确测量物体表面点的坐标。
另外,为了后续的数据处理点云拼接的进行,采用在扫描仪扫描的视场内配置测量标靶或基于不同测站共用的测量公共控制点的方法。