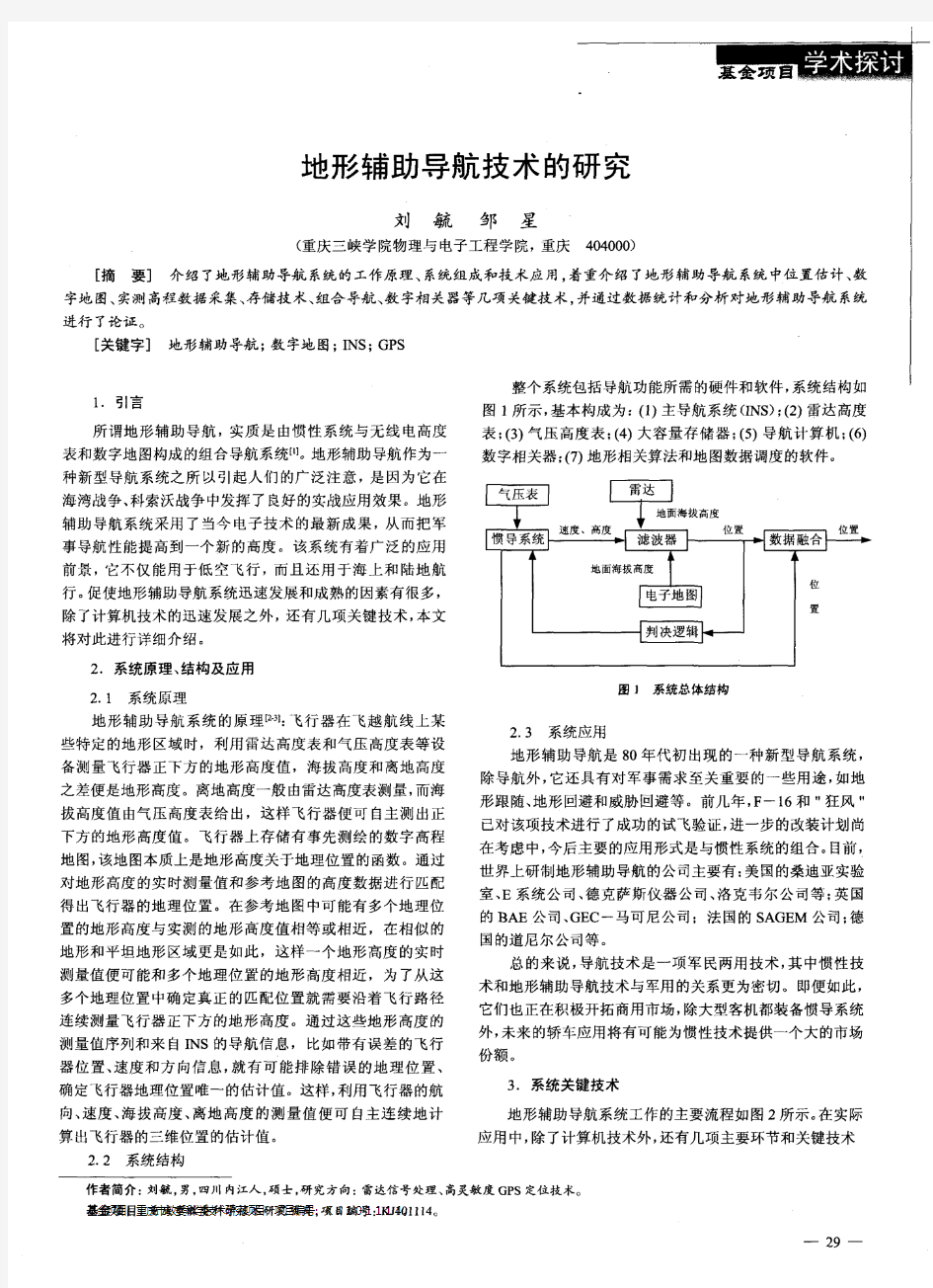
Advanced Robotics,Vol.15,No.5,pp.533–549(2001) óVSP and Robotics Society of Japan2001. Full paper Towards terrain-aided navigation for underwater robotics STEFAN WILLIAMS¤,GAMINI DISSANA YAKE and HUGH DURRANT-WHYTE Australian Centre for Field Robotics,Department of Mechanical and Mechatronic Engineering, University of Sydney,NSW2006,Australia Received27July2000;accepted19November2000 Abstract—This paper describes an approach to autonomous navigation for an undersea vehicle that uses information from a scanning sonar to generate navigation estimates based on a simultaneous localization and mapping algorithm.Development of low-speed platform models for vehicle control and the theoretical and practical details of mapping and position estimation using sonar are provided. An implementation of these techniques on a small submersible vehicle‘Oberon’are presented. Keywords:Terrain-aided navigation;localization;mapping;uncertainty;autonomous underwater vehicle. 1.INTRODUCTION Current work on undersea vehicles at the Australian Centre for Field Robotics concentrates on the development of terrain-aided navigation techniques,sensor fusion and vehicle control architectures for real-time platform control.Position and attitude estimation algorithms that use information from scanning sonar to complement a vehicle dynamic model and unobservable environmental disturbances are invaluable in the subsea environment.Key elements of the current research work include the development of sonar feature models,the tracking and use of these models in mapping and position estimation,and the development of low-speed platform models for vehicle control. While many land-based robots use GPS or maps of the environment to provide accurate position updates for navigation,a robot operating underwater does not typically have access to this type of information.In underwater scienti c missions, a priori maps are seldom available and other methods for localisation must be considered.Many underwater robotic systems rely on xed acoustic transponders that are surveyed into the robot’s work area[1].These transponders are then ¤To whom correspondence should be addressed.E-mail:stefanw@https://www.doczj.com/doc/bc10359843.html,.au
水库水下地形测量中GPS结合测深仪应用 摘要:随着GPS技术的不断发展,RTK技术的出现和计算机技术的飞速发展,平面定位技术实现了高精度、自动化、数字化和实时化。随着探测技术的数字化和 自动化,为水下地形测量数字化、自动化和水利测量提供了基础,为测绘提供了 先进的手段。文章介绍GPS结合测深仪在水下地形测量中的实际应用、测深设备 的基本工作原理,以及在测量过程中会遇到的问题及处理方法。 关键词:水下地形测量;GPS;测深仪 0引言 水下地形测量在许多工程建设项目上有着重要的作用,它可以为桥梁、码头、水库、港口等工程建设项目提供必要的基础数据,是现代水利工程中的一项重要 工程技术。由于传统水下测量模式存在着诸多弊端,譬如测量难度大、数据不精确、不能反映真实水下地形等问题。现代的“GPS+数据处理软件+测深仪”的测量 模式逐步取代传统的测量模式。 1控制测量 水下地形测量应与地面上的国家控制点或高级控制点构成统一整体,只在需 求的情况下单独建立水下地形测量的高程和平面控制。 2水下地形测量 2.1数字测深仪的工作原理 数字测深仪是利用声波的传导特性,实现水下地形测量的仪器。数字测深仪 的原理是通过振荡器发出超声波后遇到障碍物,再通过接收器接收反射回的声波,通过时间差t,求出距离D=Ct/2,C为超声波波速。 2.2水下地形测量系统组成 水下地形测量利用GPSRTK和数字测深仪、计算机联合使用作业。作业人员 应在测量前将测区的范围图导入计算机,按规范要求在测量前设计好测线,测量 时应按照测线进行测量活动。利用RTK的定位定向功能指导船只航行。利用计算 机的测深软件实时观测船只的航向、航速、船只的平面坐标、水深及RTK的解状态。声波在水中传播速度受到水温、水深、水的盐度等因素的影响,因此要进行 相关参数的修改,同时可以利用声抛仪辅助修改相关参数,用以获得准确的测深 数据。 2.3水下地形测量工作原理 用测深仪专用连接杆连接测深仪与RTK,再将连接好的连接杆安装在船只上,将测深仪没入水下,连接杆要始终保持垂直于水面,并保持连接杆与船只的相对 位置不变,RTK可以实时的获得平面坐标与高程坐标,由RTK所获得的高程减去RTK距水面的高度。同时船只有一定程度的摇晃及水流的波动,因此,此时所获 得的水面高程仅为参考值。所以要求我们在工作时选择较大型的船只,同时注意 保持航速,航速不宜过快,保证数据的准确性。 2.4水下地形测量具体过程 实际工作中三人即可完成操作,由一人驾驶船只,船只要按既定航线行驶, 同时保持船只行驶速度,速度不宜快。一人利用电脑操作GPS接收机和测深仪, 实时观测数据及解状态,另一人利用声抛仪每隔一段距离测量一次声速,用以进 行声速改正,如发现问题,及时处理。 2.5设备的安装 所选用的船只尽量选择大而稳的。测深仪的换能器要尽量远离船只的发动机、
浅析全球卫星导航定位技术原理及应用 一、前言 导航定位的需求,可以说不是历来就有的,在人类早期物质生产活动中以牧猎为主,日出而作,日落而息。当时人们离不开森林和水草,或是随着水草的兴衰而漂泊不定,根本不需要什么明确的定位。但是,随设社会的发展,到了农业时代,在人们开发农田,兴修水利等相应活动中就逐渐产生了测绘定位的需求,可以说在这时,导航定位就在慢慢酝酿之中。等到了工业时代,人类的活动遍及全球,而一些工程比如航海、航空、洲际交通工程,通信工程,矿产资源勘探工程,地球生态及环境变迁的研究,就需要精确地定位。这些需求促使导航定位技术的发展,并把这项技术带到一个前所未有的发展时期,它的手段也从光学机械过渡到光电子精密机械仪器的时代。社会是不断发展的,科技是不断进步的,20世纪末,出现了电子计算器技术、半导体技术、激光技术、航天科学技术,它们的出现,把人类带到了电子信息时代和航天探索时代。当1957年前苏联发射了人类第一颗人造地球卫星,人类跟踪无线电信号中发现了卫星无线电信号的多普勒频移现象,这预示着一种全新的天空定位技术的可行性,由此,人类进入了卫星定位和导航的时代。 二、简介 1:全球卫星导航定位系统(global navigation and positioning satellite system)采用极轨道星座和无源定位方式为美国提供全球覆盖的导航及定位系统。简称GPS。其轨道高度约为2×104 km,在6条轨道上运行有24颗卫星,每12 h绕地球一周,能保证地球上任何地点的用户都能至少同时看到4颗卫星。它属于非静止卫星定位系统。移动用户利用导航定位接收机来接收4颗(或4颗以上)卫星的导航定位信号,并测量不同信号的到达时间,求出移动用户的三维空间坐标,自动给出经度和纬度显示,从而实现用户的自主定位。也可通过无线传输手段将用户定位信息传送到调度中心,实现对移动用户的调度控制。 GPS向用户广播的导航信号为双频,分别为1 575.42MHz 和1 226.60MHz。采用多种直接序列扩频码的码分多址和伪码测距技术。直接序列扩频码主要有P码和C/A码。P码的定位精度高,三维精度可达5 m之内;C/A码定位精度较低,三维精度在50m内。目前C/A 码是对民用免费开放的。因为它是无源定位系统,移动用户的数量没有限制。 2:全球定位系统(Global Positioning System) 简单地说,这是一个由覆盖全球的24颗卫星组成的卫星系统。这个系统可以保证在任意时刻,地球上任意一点都可以同时观测到4颗卫星,以保证卫星可以采集到该观测点的经纬度和高度,以便实现导航、定位、授时等功能。这项技术可以用来引导飞机、船舶、车辆以及个人,安全、准确地沿着选定的路线,准时到达目的地。 全球定位系统(GPS)是20世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统。其主要目的是为陆、海、空三大领域提供实时、全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的,是美国独霸全球战略的重要组成。经过20余年的研究实验,耗资300亿美元,到1994年3月,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。 3:卫星导航系统 顾名思义,就是“全球卫星导航系统”。主要采用最新GPS技术在导航通讯领域的最新应用系统。卫星导航全球性大众化民用,刚刚开始,有百种应用类型。卫星导航的生命期至
编号:CTSO-C196b 日期: 局长授权 批准: 中国民用航空技术标准规定 本技术标准规定根据中国民用航空规章《民用航空材料、零部件和机载设备技术标准规定》(CCAR37)颁发。中国民用航空技术标准规定是对用于民用航空器上的某些航空材料、零部件和机载设备接受适航审查时,必须遵守的准则。 机载增强的全球定位系统(GPS)机载辅助导航传感器 1. 目的 本技术标准规定(CTSO)适用于为机载增强的全球定位系统(GPS)机载辅助导航传感器申请技术标准规定项目批准书(CTSOA)的制造人。本CTSO规定了机载增强的全球定位系统(GPS)机载辅助导航传感器为获得批准和使用适用的CTSO标记进行标识所必须满足的最低性能标准。CTSO-C196b包含了CTSO-C145d中的许多技术性能改进,但不包括星基增强系统(SBAS)技术要求以及SBAS 星基增强的运行特点。 注:本次修订允许申请人使用CTSO-C206 GPS电路板组件(CCA)功能传感器作为CTSO申请的重要组成部分。 2. 适用范围 本CTSO适用于自其生效之日起提交的申请。按本CTSO批准的设备,其设计大改应按CCAR-21-R4第21.353条要求重新申请CTSOA。
3. 要求 在本CTSO生效之日或生效之后制造并欲使用本CTSO标记进行标识的机载增强的全球定位系统(GPS)机载辅助导航传感器应满足RTCA/DO-316《全球定位系统/机载增强系统机载设备最低运行性能标准》第2.1节(2009.4.14发布)。 CTSO-C196b申请人可以选择使用CTSO-C206 GPS CCA功能传感器。选择使用CTSO-C206 GPS功能传感器的申请人可凭借CTSO-C206 的CTSOA而获得如下的审定符合性的置信度: ●满足最低性能标准(MPS)第2.1节规定的要求; ●硬件/软件鉴定; ●失效状态类别; ●MPS第2.3节的性能试验(功能鉴定),本CTSO附录1中规定的除外。 使用CTSO-C206 GPS CCA功能传感器的CTSO-C196b申请人应开展附录1中所述的试验,并满足本CTSO其它章节中上述所列几点未涵盖的关于获得CTSO-C196b CTSOA的要求。使用CTSO-C206 GPS CCA功能传感器作为其CTSO-C196b申请一部分的终端制造人,依照CCAR21部,对其获取的CTSO-C196b CTSOA中规定的设计和功能负全部责任。 a.功能 (1) 本CTSO的标准适用于接收信号,并为可结合预期飞行航道输出偏航指令的导航管理单元应用提供位置信息的设备,或者为如
面向地形辅助导航的地形信息分析 刘鹰1,张继贤o,柳健1 (1华中理工大学电信系图像教研室,武汉430074) (o中国测绘科学研究院 100039) 摘要:对地形D EM(数字高程模型)数据中所含信息的多少及信息的可利用程度进行了分析,地形信息的分析结果可作为地形辅助导航和飞行路线选择的参考依据。 关键词:惯性导航系统;地形轮廓线匹配;地形高程模型 中图分类号:P20 文章标识码:A 文章编号:1000-3177(2000)58-0021-03 1 引 言 在飞行过程中,一般需要利用地形辅助导航系统来纠正INS(惯性导航系统)所积累的导航定位误差,TERCOM(地形轮廓线匹配)是其中一种比较典型的辅助导航系统。它的工作原理说明,飞行器位置的确定是利用实测的地形高程剖面与根据INS位置信息和地形高程数据库计算所得的地形高程剖面,按一定的算法作相关分析,所得的相关极值点对应的位置就是飞行器的当前位置。然而,由匹配计算理论及飞行实验我们知道,整块平坦地区的误匹配概率要比有一定起伏地区的误匹配概率高。因此在航迹规划时,我们要让航迹尽量避开那些连续的平坦区域,而选择具有一定起伏的区域,在这里,我们称前者的信息量少,而后者则相反。但是,在进行地形的匹配搜索运算时,考虑到不同地形块之间的相似性,因此尽管有些地形的信息量较大,但由于相关性太大而导致可利用的程度不高,所以要对地形进行相关程度的分析。用以上分析的结果来指导航迹的选择,进行飞行任务的合理规划。 2 地形信息的分析 2.1 地形特征参数的选择 地形信息的分析作为地形分析的一部分,是通过研究与地形辅助导航密切相关的地形特征因素及各因素的贡献,从而为地形信息分析提供实验和理论依据。理论上来说,一旦地形的高程值给定之后,有关地形的信息就已经完全得到了。因此,根据回归分析法研究常用特征参数之间的关系,我们选取以下7项特征参数作为地形分析的主要度量指标: 1分形维数; o地形标准差; ?X,Y方向相关长度; ?X,Y方向块相似度; ?粗糙度; ?斜率均方差; ?频域收敛度。 这7个特征参数基本上可以反映出地形的主要情况。因此,我们就可以根据这几个参数来衡量地形的信息量大小。 2.2 地形的类型初判 在对某块地形作直观描述时,我们常用到“平原、丘陵、高山”等字眼,这些词粗略地反映了地形的概貌。用数学方法和语言来描述,就是反映地形数据的平均高程值大小和标准差的大小。例如,我们平时称为“平原”的地区,其对应的高程值和标准差值都比较小。为了对地形的类型作进一步较精确的分类,我们在此还引入了地形的另一特征参数地形的自相似系数H。 H和地形分形维数D之间的关系是: D=3-H(1)由分形理论分析可知,H参数反映了地形微起伏的复杂程度或表面的破碎程度,是对地形复杂情况的一种抽象和概括,也直接影响地形的匹配概率和匹配精度。H值越大,则地形表面越简单,信息量较小;H值越小,则地形的表面越复杂,信息量相对来说较大。根据经验值取分形门限H为: 0.7~1.0:信息贫乏区 0.3~0.7:可匹配区 0.0~0.3:地形危险区 作者简介:刘鹰,男,(1975~)华中理工大学电信系信息与信号处理专业硕士研究生,主要研究方向为图像处理,模式识别和信号处理。 21
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920526696.X (22)申请日 2019.04.18 (73)专利权人 吉林大学 地址 130012 吉林省长春市前进大街2699 号 (72)发明人 王楠 张峻伟 吉林杰 张茜 陈秋昀 庞礼健 杜瑞 刘建业 刘涵 (74)专利代理机构 长春吉大专利代理有限责任 公司 22201 代理人 朱世林 张晶 (51)Int.Cl. G01C 21/36(2006.01) G01C 21/26(2006.01) B62J 3/00(2006.01) B62J 6/00(2006.01) (54)实用新型名称共享单车安全导航辅助装置(57)摘要本实用新型属于车辆导航技术领域,涉及一种震动与灯光辅助骑行的导航装置。包括智能把手和智能灯环,智能把手设置于共享单车两侧的把手处,以代替原有把手位置;所述智能灯环设置于共享单车的车头上;智能把手8包括LED灯A、震动马达、主芯片A和锂电池A;主芯片A与LED灯A、震动马达相连接,以发送控制信号;智能灯环由LED灯B、主芯片B、锂电池B、蓝牙模块、显示屏组成;蓝牙模块与主芯片B相连接,以接收第三方App导航软件的导航数据;主芯片B与显示屏和LED灯B相连接,以发送控制信号。有效解决骑行者骑单车时使用手机导航不方便的问题,也不再需要单独设计新的导航系统,节约开发成本,市 场上已有的手机导航APP能够继续被用户使用。权利要求书1页 说明书4页 附图3页CN 209485376 U 2019.10.11 C N 209485376 U
南京理工大学 课程论文 课程名称:导航定位技术概论 论文题目:导航定位技术与光学的联系姓名:王彬 学号: 1111100228 成绩:
导航定位技术与光学的联系 姓名:王彬学号:1111100228 专业:光信息科学与技术 引言:本文主旨是探讨导航定位系统与光信息科学与技术专业之后间的联系。对现代科技中的光学和导航技术作了详细的介绍。讨论现代光学技术与导航系统的共通之处。举例介绍了光在导航定位系统中应用的实例,如激光陀螺,光纤陀螺和激光跟踪导航。并对未来可能的发展做了展望。 光学作为一门诞生340余年的古老科学 经历了漫长的发展过程 从经典光学到近代光学 再到现代光学 它的发展也表征着人类社会的文明进程。展望21世纪 随着以光信息为代表的信息化社会的发展 人类将迈进光子时代 光子学的发展和光子技术的广泛应用将对人类生活产生巨大影响。光学是研究光的产生和传播、光的本性、光与物质相互作用的科学。光学作为一门诞生340 余年的古老科学, 经历了漫长的发展过程, 它的发展也表征着人类社会的文明进程。20 世纪以前的光学, 以经典光学为标志, 为光学的发展奠定了良好的基础; 20 世纪的光学, 以近代光学为标志取得了重要进展, 推动了激光、全息、光纤、光记录、光存储、光显示等技术的出现, 走过辉煌的百年历程; 展望21 世纪的现代光学, 将迈进光子时代, 光子学已 不是物理学的学术上的突破, 它的理论及其光子技术正在或已经成为现代应用技术的主角, 光子学的发展和光子技术的广泛应用将对人类生活产生巨大影响。 定位与导航技术是涉及自动控制,计算机,微电子学,光学,力学,以及数学等多学科的高技术,是实现飞行器特别是航天飞行任务的关键技术,也是武器精确制导的核心技术。导航定位技术被应用于人类生活中的各处各地,时时刻刻。他为我们的的生活提供了巨大的便利,深深地融入我们的生活。他包涵天文导航,地文导航,惯性导航,无线电导航,卫星导航和其他等等。目前应用最广,技术最完善最先进的是卫星导航。有美国的GPS导航系统,俄罗斯的GLONASS系统,欧洲的GALILEO系统和中国的北斗导航系统。其中最具代表性的是美国的GPS。 最初的GPS计划在联合计划局的领导下诞生了,该方案将24颗卫星放置在互成120度的三个轨道上。每个轨道上有8颗卫星,地球上任何一点均能观测到6至9颗卫星。这样 粗码精度可达100m,精码精度为10m。由于预算压缩,GPS计划不得不减少卫星发射数量 改为将18颗卫星分布在
2012年2月刊 人工智能与识别技术 信息与电脑 China Computer&Communication 1.引言 智能交通系统(ITS )已被公认为解决消防部队在突发事故发生时如何快速抵达事故现场问题的有效途径,它是在关键基础理论研究的前提下,将先进的信息技术、数据通信技术及电子控制技术等有效地综合运用于地面交通运输体系,从而建立起一种大范围、全方位发挥作用、实时、准确、高效的交通运输系统。 车辆定位导航技术是ITS 中的关键技术之一。车辆导航定位系统的首要功能是能够提供车辆的位置、速度和航向等信息,而精确、可靠的车辆定位则是实现导航功能的前提和基础。常用的车辆定位技术主要有:航位推算技术(DR)、卫星定位技术(GPS)、惯性导航技术(INS)、地图匹配技术(MM)等等。由于基于任何一个单独的定位技术的系统都有本身无法克服的短处,因此出现了组合导航系统。本文根据智能交通系统的特点,提出了GPS 、航位推算技术与地图匹配技术相结合的组合导航系统。 2.GPS定位技术 全球定位系统(Global Positioning System-GPS)[1] 是当前全球定位系统中技术最成熟,应用也最为广泛的系统。它可以全天候连续为全球范围陆、海、空军民用户提供定位导航信息,用户设备的定位精度优于20m ,时间准确度达到ns 量级。具有全天候,定位迅速,精度高,可连续提供三维位置(精度、纬度和高度)、三维速度和时间信息等一系列优点[2],主要应用于单点导航定位与相对测地定位两个方面,是当今车辆定位导航的主流。 GPS 系统包括三大部分:(1)空间部分——GPS 卫星星座 由24颗在轨卫星和3颗备份卫星组成,部署在高达20200km 的轨道上,在地球上和近地空间任何一点均可连续同步地观测4颗以上卫星,从而实现全球、全天候连续导航定位。 GPS 的空间卫星星座如图1所示: 组合定位导航技术研究 谭炳文 (武警赣州市消防支队上犹县公安消防大队,江西赣州341200) 摘要:定位导航技术是智能交通系统(ITS )的关键技术之一。文章首先介绍了GPS 、INS (惯性导航)、DR (航位推算)三种常用定位导航技术,重点研究了各自的优点及缺点。接着探讨了GPS/DR 组合定位导航技术的优势所在。最后,为了进一步提高定位精度,提出采用MM (地图匹配)技术来进一步修正误差,使得定位功能更加准确可靠。 关键词:GPS ;惯性导航;航位推算;地图匹配 中图分类号:U666 文献标识码:A 文章编号:1003-9767(2012)02-0008-03 (2)地面控制部分——地面监控系统 地面控制部分是整个系统的中枢,由美国国防部管理,它包括1个主控站,5个监控站。主控站负责对地面监控站的全面控制。监控站内装备有接收机、原子钟、气象传感器及数据处理计算机,其任务是追踪及预测GPS 卫星轨道,控制GPS 卫星状态及轨迹偏差,维护GPS 系统的正常运作。 (3)用户设备部分——GPS 信号接收机 用户部分则是适用于各种用途的GPS 接收机,其主要功能是接收GPS 卫星播发的定位信息,GPS 用户接收机是由主机、电源和天线组成。主机的核心部件是信道电路、基带处理电路和中央处理器,在专用软件的控制下,进行作业卫星选择、数据搜集、加工、传输、处理和存储,其天线则接收来自各方位的导航卫星信号。GPS 接收机接收到从卫星传来的连续不断的编码信号后,再根据这些编码辨认相关的卫星,从导航电文中获取卫星的位置和时间,然后计算出接收机(即用户)所在的准确地理位置。 三者的关系如图2所示: 图1 GPS的空间卫星星座 图2 GPS全球卫星定位系统的三大组成 GPS 导航利用GPS 模块接受导航卫星信号,然后计算出汽车的经纬度、速度、行驶方向、时间等信息,它具有全球性、全天候、低成本、高精度、实时三维的测定位置和速度的能力,因而有很大的优势。 但是,GPS 导航也有其本身所固有的弱点[3],主要是非自主性、易受干扰、动态性能较差,卫星信号因在有些地方受遮挡会导致丢失信号而影响定位,定位精度容易受电子欺骗等因素影响。更致命的是城区内地物特征复杂,当卫星信号被树木、城市高层建筑、隧道和桥梁等遮挡或GPS 接收机接收不到四颗及以上的卫星信号时,GPS 导航系统便不能提供连续导航信息,其定位误差将增大,甚至可能出现不 定位的现象。
国内讲堂11 继续医学教育 第21卷第12期计算机辅助导航技术在骨科手术中的应用 邱贵兴(中国医学科学院协和医科大学北京协和医院骨科 100710) 作者简介邱贵兴,男,江苏省无锡市人,教授,博士生导师,中华医学会骨科分会主任委员,中华医学会北京分会骨科专业委员会主任委员,中华骨科杂志主编,吴阶平医学基金会理事,中华医学会国际交流与合作工作委员会委员。影像导航技术问世之前,骨科医生在术中,凭借人体的骨骼解剖特点、术前患者的影像学资料(X线片、CT、MRI)和术中的X线透视进行定位。但是,解剖变异或解剖标志的缺乏等往往会导致术中的定位偏差。因此,手术者的实践经验就非常重要。然而,即使是非常有经验的骨科医生,用传统方法进行较精确定位的手术,也有出现偏差的可能性。临床和实验研究已经显示,用传统定位方法行腰椎椎弓根钉植入的失误率为20%~30%。然而,如果 应用影像导航技术,椎弓根钉植入的失误率只有0~4%。近年来,计算机辅助影像导航系统用于术前制定手术计划和术中导航,在手术过程中跟踪手术器械,帮助骨科医生更精确和更安全地进行多种复杂手术。因此,该技术有许多不可替代的优越性,已被越来越广泛地应用于骨科手术中。1 骨科计算机辅助导航技术的简史影像导航,也称为无框架立体定向。1986年Roberts首次报告使用声波数字化仪跟踪手术器械或显微镜的方法,从而开创了无框架立体定向神经外科。随后,Bernett和 Reinhard对超声波系统进行了改进,使导航精度有了一定的提高,但声学环境及温度很容易造成干扰而使导航失败。1991年日本的Wanatabe和美国的Pell相继发明了遥控机械臂定位系统,可以不受瞄准线约束。但因其体积过大,使医生的操作受限。1992年,使用红外线跟踪技术的影像导航系统在美国开始应用于临床。这是世界上首台光学手术导航系统,由于其精度较高,所以成为目前市场上的主流产品。同年,著名的神经外科专家Kevin Foley将光学手术导航系统应用于脊柱外科领域。1995年,Gunkel推出了电磁感应型导航系统,但由于手术室各种金属器械及仪器都会影响电磁场,从而影响其精度,所以未能很好推广。1999年首台完全针对骨科的手术导航系统进入市场。X线透视和红外线跟踪技术、计算机定点手术技术的结合提供了一种新颖的术中影像导航的方法,减少了术中X线透视的缺点。同时,应用术前的CT和MR扫描数据进行骨结构的三维重建,在术前进行手术方案设计,并在术中对正常或病变结构进行精确定位,以协助医生安全、精确地完成手术。2 骨科计算机辅助导航系统的组成及工作原理以X线透视影像导航为例,X线透视法和计算机技术的结合增加了标准透视法的优点,减少了缺点。在“C”型臂透视X线机的图像增强器上安装校准靶,经过一次或多次投照中获得的透视图像和位置校准后,计算机工作站就可以建立起一个透视图 像的模型,将追踪的手术器械与保存的图像叠加在 一起。当手术器械对之前获得的透视图像进行操作 时,系统可以同时显示它们在多个平面上的位置关系,这种方式称为“虚拟透视”。透视图像可保存,透视时手术人员可以从手术区域离开,大大减少了放射线辐射。而且系统已保存了多次投照的影像和有效的数据,因此不必重新摆放“C”型臂。“C”型臂可以推离手术区域,导航可以继续,而且不妨碍医生的操作。 近年来,新型的计算机辅助导航系统可将患者的术前薄层CT扫描(可以0.8 mm)或MR扫描数据进行处理,使患者的骨骼扫描数据变成三维立体虚拟图像储存在计算机中。医生可在术前利用该计算机系统进行详尽的手术设计。术中应用光学定位系统,跟踪测量手术器械上的发光二极管或被动反射球的位置。由计算机测算手术器械与被操作的骨结构之间的位置关系,可以动态的显示手术器械
深空探测的自主导航技术研究综述 学号:0910200129,姓名:李吉 摘要:导航定位是深空探测的基础,由于深空探测距离遥远,导航的精度要求非常高,其中测距、测速、测角依照传统地球卫星的导航定位方法很难完成。X 射线脉冲星作为自然的天体,其运行特性不会受到人为的破坏与干扰,具有适于自主导航的显著特征,非常适合于深空探测的导航。本文综合国内外现有的研究成果,系统阐述了基于 X 射线脉冲星自主导航的基本原理、关键技术、国内外的研究现状以及我国现有的基于 X 射线脉冲星自主导航技术研究的基础条件。从而指出,我国已经具备 X 射线脉冲星观测和理论研究的基本条件。基于 X 射线脉冲星的自主导航是实现航天器高精度自主导航的新思路和可行途径,对于深空探测具有重要的理论研究意义和实际工程应用价值。 关键词:深空探测;X 射线脉冲星;自主导航 1 .引言 二十一世纪以来,各主要航天大国纷纷将深空探测作为重点发展的航天领域之一;而我国也正在加紧自己的探测步伐[1]。导航定位是深空探测的基础,深空探测器在空间运行,地面站同它建立通信链路,为保证通信质量必须知道探测器在相应坐标系中的位置(距离和角度)和速度,使得天线主瓣方向能够对准探测器和接收信号,反之同理。由于深空探测距离遥远,需要精确的测角、测距和测速能力,为深空探测器导航定位。因为空间探测器定轨的优势是深空探测器的大致位置事先知道,不需要测定整个距离,只需对事先确定的值进行验证和改进。现在对于地球周围的卫星,无论是静止轨道还是低轨和中轨上的卫星,对其 定轨都不存在太大的困难。但是由于深空探测距离遥远,导航的精度要求非常高,其中测距、测速、测角依照传统地球卫星的导航定位方法很难完成[2]。 上世纪60-70年代,深空探测导航系统主要采用地基无线电外测技术为巡航阶段的探测器导航和测轨,甚至用在探测器交会阶段。80年代以来,采用甚长基线干涉技术,利用测距换算出角度,利用增加的基线长度减少测距误差的影响,测角精度达20-30nrad。NASA进而又开发了连接元干涉技术,两测站之间相距21km,宽带光纤连接的测站将收到的信号用光纤传到信号处理中心,实时导航精度达80nrad[3]。 NASA正在开发同波束干涉技术,它是在两个航天器非常接近的情况下,它们可以在地面天线的同一波束内观测,使得两个深空站天线对两个航天器同时观测,产生差分干涉测量,提供天平面上两个航天器非常精确的相对角位置[4]。 中国国内有学者提出利用地球静止轨道卫星编队进行深空导航,将卫星编队的轨道高度上升到静止轨道高度,在地球静止轨道上相距一定角度分布两个卫星编队。采用两个卫星编队相距59°地心夹角,构成天基连续导航系统。该卫星编队采用无源反向导航方法,多颗卫星共同接收深空探测器信号,依照信号到达各个卫星时间差确定探测器空间位置[5]。 但是,在深空探测的过程中,航天器远离地球,与地面通信困难且易受到干扰,因此具有自主导航能力非常重要。由于目前的导航卫星主要是为地面和近地空间应用设计的,难以应用于深空轨道;由于飞行时间很长,惯导系统漂移很大,需要引入独立的导航系统进行修正;一般的星敏感器也易于受到太阳的干扰。而应用脉冲星导航则有望克服以上的困难。
无人机导航定位技术简介与分析 无人机导航定位工作主要由组合定位定向导航系统完成,组合导航系统实时闭环输出位置和姿态信息,为飞机提供精确的方向基准和位置坐标,同时实时根据姿态信息对飞机飞行状态进行预测。组合导航系统由激光陀螺捷联惯性导航、卫星定位系统接收机、组合导航计算机、里程计、高度表和基站雷达系统等组成。结合了SAR 图像导航的定位精度、自主性和星敏感器的星光导航系统的姿态测定精度,从而保证了无人飞机的自主飞行。 无人机导航是按照要求的精度,沿着预定的航线在指定的时间内正确地引导无人机至目的地。要使无人机成功完成预定的航行任务,除了起始点和目标的位置之外,还必须知道无人机的实时位置、航行速度、航向等导航参数。目前在无人机上采用的导航技术主要包括惯性导航、卫星导航、多普勒导航、地形辅助导航以及地磁导航等。这些导航技术都有各自的优缺点,因此,在无人机导航中,要根据无人机担负的不同任务来选择合适的导航定位技术至关重要。 一、单一导航技术 1 惯性导航 惯性导航是以牛顿力学定律为基础,依靠安装在载体(飞机、舰船、火箭等)内部的加速度计测量载体在三个轴向运动加速度,经积分运算得出载体的瞬时速度和位置,以及测量载体姿态的一种导航方式。惯性导航系统通常由惯性测量装置、计算机、控制显示器等组成。惯性测量装置包括加速度计和陀螺仪。三自由度陀螺仪用来测量飞行器的三个转动运动;三个加速度计用来测量飞行器的三个平移运动的加速度。 计算机根据测得的加速度信号计算出飞行器的速度和位置数据。控制显示器显示各种导航参数。惯性导航完全依靠机载设备自主完成导航任务,工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰,不受气象条件限制,是一种自主式的导航系统,具有完全自主、抗干扰、隐蔽性好、全天候工作、输出导航信息多、数据更新率高等优点。实际的惯性导航可以完成空间的三维导航或地面上的二维导航。 2 定位卫星导航 定位卫星导航是通过不断对目标物体进行定位从而实现导航功能的。目前,全球范围内有影响的卫星定位系统有美国的GPS,欧洲的伽利略,俄罗斯的格拉纳斯。这里主要介绍现阶段应用较为广泛的GPS全球定位系统导航。
导航定位技术研究 【摘要】本文针对导航定位技术的研究现状,给出单一定位技术GPS所存在定位盲区不足问题,给出组合导航定位解决的方法。 【关键词】导航;无线定位;GPS Navigation and Positioning Technology Research FU Cheng-biao (School of Department of Computer Science and Engineering,Qujing Normal College,Qujing Yunnan 655011,China) 【Abstract】Navigation and positioning technology research for the status quo,this paper given the existence of a single positioning technology GPS positioning blind shortage,and given combination of navigation and positioning solutions. 【Key words】Navigation;Wireless location;Project driven method;Global positioning system 0 引言 众所周知,跟踪定位运动的目标,关键在于获取到目标的位置信息,通过目标的位置信息构成一定的运动轨迹,从而确定目标的运动方向。在目前的无线导航定位技术中,常用的GPS定位技术,但由于GPS定位技术存在盲区[1],比如下在地方停车场位置、深山峡谷中、高楼大厦间等地理区域都存在严重的定位盲区,使得GPS卫星信号收到严重的遮挡,从而无法确定目标的位置信息,不能判断目标的运动方向,导致跟踪任务的失败。因此,出现很多新的无线导航定位技术,例如,GLONASS、伪卫星定位技术、中国北斗定位技术、电视定位技术、室内定技术、UWB定位技术、无线传感网络定位技术等等,这些新技术的出现,解决了单一定位技术所存在的难点问题。 1 无线定位导航 所谓导航的概念指的是一门科学,而该科学指的是目标用户的位置变化情况。在平时人们的活动当中,几乎每一个人都会涉及到各种各样的导航形式,比如说学生走路去学校,是依靠同学们使用他们的眼睛以及地标等信息,但是在某些情况下人们还需要使用其它的导航信息,并且该信息要与地标等信息不相同,如设置在汽车里的里程表等装置,来为人们提供更为准确的位置坐标信息[2],以及到达目的地所需要的具体时间长短。与此同时,市场上还存在一些通过发射电子信号来实现定位功能的较为复杂的导航装置,他们被称为无线电导航装置。此时,人们可以利用这些信号,来定位出目标用户的位置坐标信息。
1试说明GPS全球定位系统的组成以及各个部分的作用。 (1) 空间星座 GPS卫星星座由24颗(3颗备用)卫星组成,分布在6个轨道内,每个轨道4颗。 基本功能:接收和存储由地面监控站发出的导航信息,接收并执行监控站的控制指令;利用卫星的微处理机,对部分必要的数据进行处理;通过星载原子钟提供精密时间标准;向用户发送定位信息;在地面监控站的指令下,通过推进器调整卫星姿态和启用备用卫星。 (2) 地面监控 地面监控部分由分布在全球的5个地面站组成,包括5个监测站,1个主控站,3个信息注入站。 监测站:对GPS卫星进行连续观测,进行数据自动采集并监测卫星的工作状况。 主控站:协调和管理地面监控系统,主要任务:根据本站和其它监测站的观测资料,推算编制各卫星星历、卫星钟差和大气修正参数,并将数据传送到注入站;提供全球定位系统时间基准;各监测站和GPS卫星原子钟,均应与主控站原子钟同步,测出其间的钟差,将钟差信息编入导航电文,送入注入站;调整偏离轨道的卫星,使之沿预定轨道运行;启用备用卫星代替失效工作卫星。 注入站:在主控站控制下,将主控站推算和编制的卫星星历、钟差、导航电文和其它控制指令等,注入到相应卫星的存储系统,并监测注入信息的正确性。 (3) 用户设备 由GPS接收机硬件和数据处理软件以及微处理机和终端设备组成。 GPS接收机硬件主要接收GPS卫星发射的信号,以获得必要的导航和定位信息及观测量,并经简单数据处理而实现实时导航和定位。GPS软件主要对观测数据进行精加工,以便获得精密定位结果。 2试说明我国北斗导航卫星系统与GPS的区别 一是使用范围不同。“北斗一号”是区域卫星导航系统,只能用于中国及其周边地区,而GPS是全球导航定位系统,在全球的任何一点只要卫星信号未被遮蔽或干扰,都能接收到三维坐标数据。二是卫星的数量和轨道是不同的。“北斗一号”有3颗,位于高度近3.6万千米的地球同步轨道。三是定位原理不同。“北斗一号”是用户首先发射要求服务的信号,通过卫星转发至地面控制中心,地面控制中心计算出用户机的位置后再通过卫星答复用户,而GPS只需要4个卫星的位置信息,由用户接收机解算出三维坐标,由于“北斗一号”本身是二维导航系统,仅靠2颗星的观测信号尚不能定位,观测信号的获得需要具有转发或收发信号功能,而通信功能是GPS不具备的。 3 GPS相较其他导航定位系统的特点 1.功能多,用途广.可以用于导航,测时,测速,测量及授时. 2.定位精度高. 3.实时定位. 天球:以地球质心为中心,半径r为任意长的一个假想的球体。 大地经纬度:大地经度是指通过参考椭球面上某一点的大地子午面与本初子午面之间的二面角,大地纬度是指过参考椭球面上某一点的法线与赤道面的夹角 天文经纬度:天文经度是指本初子午面与过观测点的子午面所夹的二面角,天文纬度是指过某点的铅垂线与赤道平面之间的夹角。 黄道:地球公转的轨道面与天球相交的大圆即地球绕太阳公转时,地球上观测者所见到太阳在天球上运动的轨迹春分点:当太阳在黄道上从天球南半球向北半球运行时,黄道与天球赤道的交点 赤经:从春分点沿着天赤道向东到天体时圈与天赤道的交点所夹的角度 赤纬:从天赤道沿着天体的时圈至天体的角度
全球卫星导航定位技术 摘要:卫星导航定位系统在国民经济建设中占有重要的位置,是国民经济信息化建设的重要组成部分和推进力量,是建设国家信息体系的重要基础设施,是直接关系到国家安全、经济发展的关键性系统技术平台。以GPS为代表的卫星导航定位(GNSS)应用产业已逐步成为一个全球性的高新技术产业。国家对卫星导航定位产业的发展高度重视,“十五”计划发展纲要确定卫星导航定位为国家高技术工程的12个专项之一,国家发改委在2002年实施了卫星导航产业化专项,以北斗卫星导航试验系统和其他卫星定位导航系统的广泛应用为推动力的我国卫星导航定位产业,正进入高速发展的关键时期。本文介绍了全球卫星导航系统的现状以及分析其原理,并分析了全球卫星导航的发展应用。 关键词:卫星导航定位系统;高新技术 Abstract: the satellite navigation and positioning system in the development of national economy, holds the important position, the informationization of the national economy is the important part of the construction and promote the strength, the construction of national information system is the important infrastructure, is directly related to national security, economic development and the key system technology platform. As a representative of the with GPS satellite navigation and positioning (GNSS) application industry has gradually become a global new high technology industry. National satellite navigation and positioning of the development of the industry, more attention of the tenth five-year plan to determine the program for the development of satellite navigation and positioning for the national high technology project of one of the 12 special, the national development and reform commission in 2002, the industrialization of the satellite navigation special to beidou satellite navigation test system and other positioning satellite navigation system for the wide application of driving force of China’s satellite navigation and positioning industry, entering the critical period of development. This paper introduces the present situation of the global satellite navigation system and analyzes the principle, and analyzed the development and the application of the global satellite navigation. Keywords: satellite navigation and positioning system; High and new technology 按照定位导航的方式可分成:卫星定位导航、自主式导航、组合导航以及无源导航。 1、全球卫星导航系统介绍 世界上现有卫星导航系统有美国的GPS、俄罗斯的GLONASS以及欧洲