高斯滤波器和2RC滤波器
第五章高斯滤波器
5.1介绍
高斯滤波器被广泛应用于表面轮廓分析。美国标准(美国机械工程师协会2002)和国际标准(国际标准化组织1996)都对它进行了阐述。高斯滤波器的权重函数(滤波器在时域和空间域的定义)如下:
S x =αλcexp?[?π(αλc2] 5.1 式子中α= =0.4697,x是权重函数距离原点的位置,λc是粗糙度中长波波长的截止频率。
通过对连续函数S x 进行傅里叶变换可以得到函数的传递特性,变化如下: Sf λ
=∞ ?∞1xS x eiλxdx=∞1 ?∞αλce[?π(x2)]αλceiλxdx=e[?π(αλc2)]λ 5.2 从等式5.2,能够看出该正弦波振幅有衰减,其波长截止波长(λ=λc)是0.5,因此在截止处,滤波器传递了50%。下面的例子展示了,在给定权重函数下,其高斯滤波器传递曲线的样子。
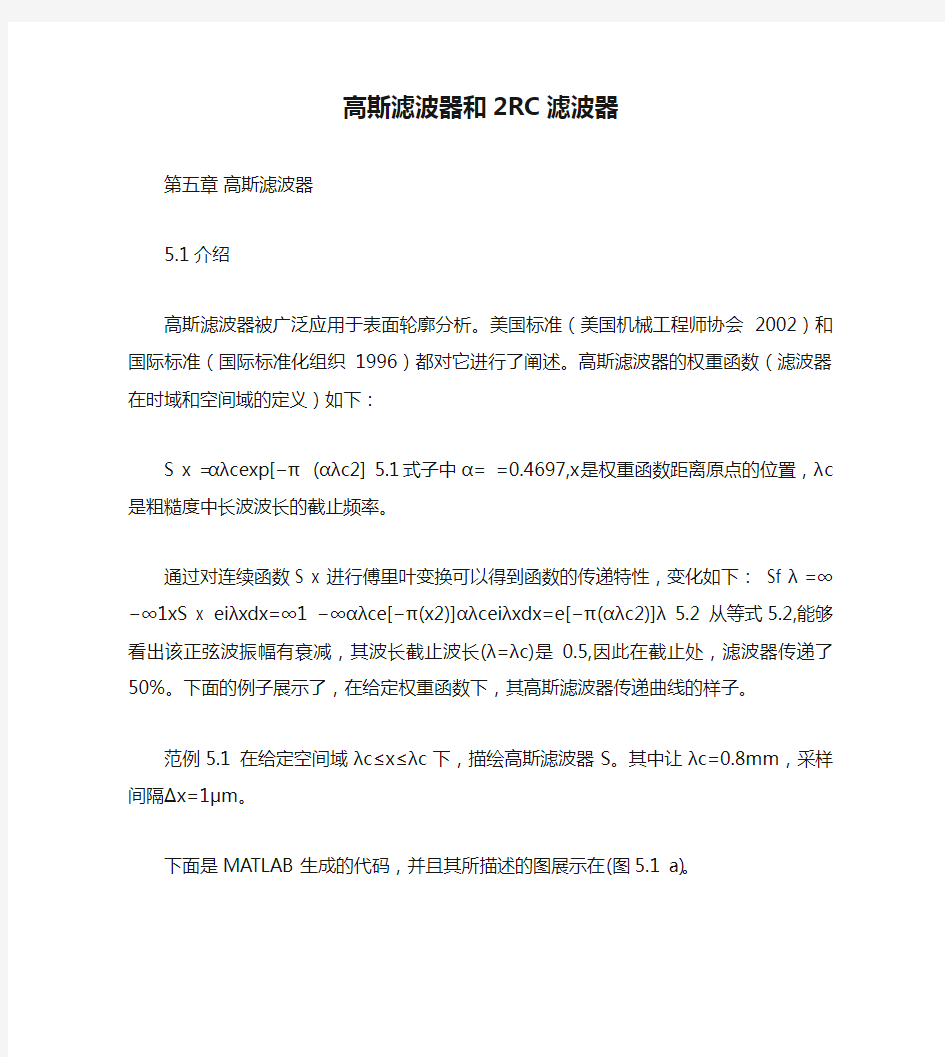
范例5.1 在给定空间域λc≤x≤λc下,描绘高斯滤波器S。其中让λc=0.8mm,采样间隔?x=1μm。
下面是MATLAB生成的代码,并且其所描述的图展示在(图5.1 a)。
图5.1 a绘制高斯滤波器;λc=0.8mm,b高斯滤波器传递特性
lambdac=0.8; % in mm
dx=0.001; % in mm
x=(-lambdac:dx:lambdac)’;
alpha=0.4697;
S=(1/(alpha*lambdac)).*exp(-pi*(x/(alpha*lambdac)).^2);
% generate the Gaussian filter
S=S/sum(S); % normalize to unit sum
plot(x,S);
xlabel(’Distance (mm)’);
ylabel(’Weighting function’);
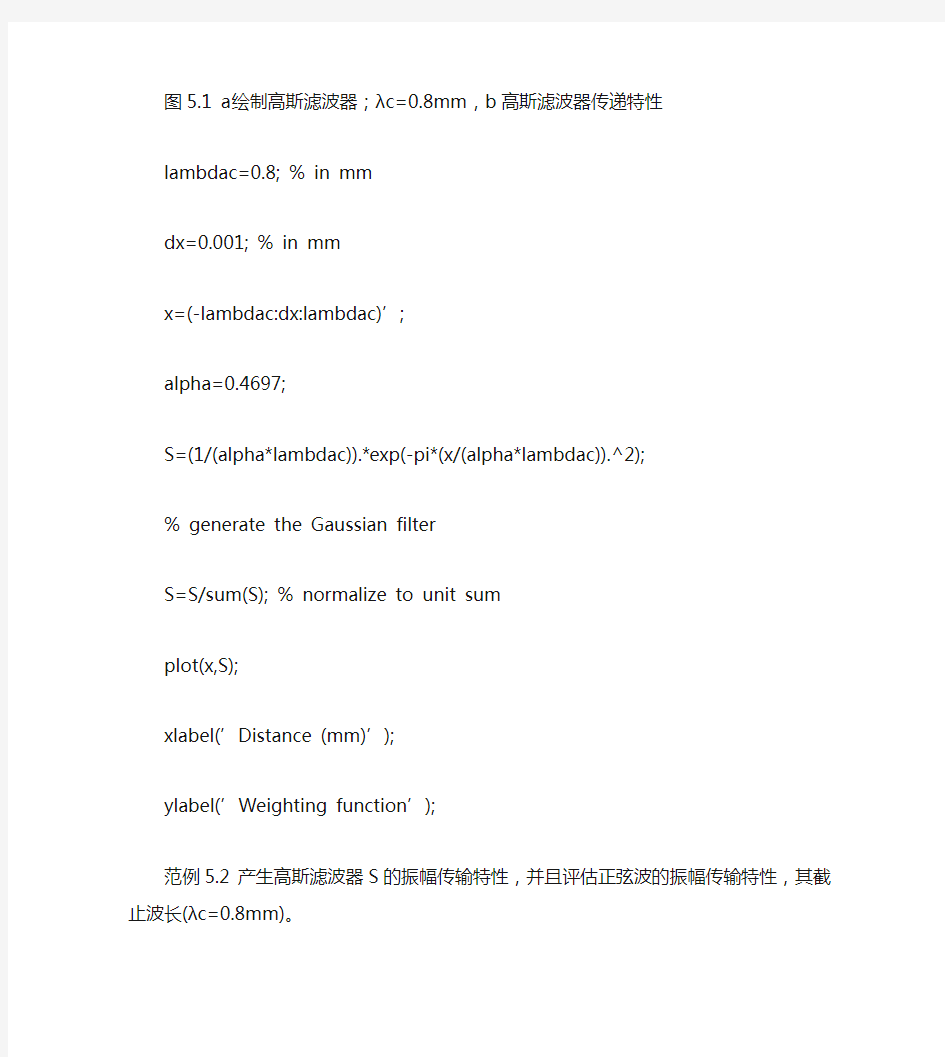
范例5.2 产生高斯滤波器S的振幅传输特性,并且评估正弦波的振幅传输特性,其截止波长(λc=0.8mm)。
高斯滤波器的传递特性能够同样获得,通过借助第四章4.4范例所示的矩形滤波器例程。传递特性如图5.1b所示。该正弦波由0.8mm波长组成,其振幅衰减为0.5(Sf的阵列
元素有11个)。因此高斯滤波器在截止频率处,传输量为50%。注意在图5.1b所示的传递特性中,可以清楚的看到,在其截止频率处有一个坡度过程,并没有直上直下的锋利过渡。这意味着滤波器不能立刻抑制所有波长小于截止频率的波长,而是在截止频率处使它们逐
渐变弱。这个传递特性也能够被描述通过直接对等式5.2采样。
m=size(S,1); % length of Gaussian filter
l=8; % length of a profile is assumed to be 8 mm
n=l/dx; % number of profile points
S=[zeros(n/2-floor(m/2),1); S; zeros(n/2-floor(m/2)-1,1)];
% center the filter and zero-pad to 8000 long
Sf=fft(S); % DFT of S
j=(2:1:floor(n/2)+1)’;% generate wavelength array for X axis of
% transmission plot
wave=n*dx./(j-1);
semilogx(wave,100*abs(Sf(2:floor(n/2)+1,1)));
xlabel(’Wavelength (mm)’);
ylabel(’Amplitude (%)’);
5.2高通和低通滤波器
迄今为止描述的滤波器都是低通滤波器,因为它只能传递低频部分(波长大于截止波长)。第3章和第4章所描述的矩形滤波器和步进滤波器也都是低通滤波器。低通滤波器
是一个平均滤波器因为它能产生一个光滑的轮廓。一个滤波器也能够被设计成只传输高频
的信号。这种滤波器是众所知周的高通滤波器。高斯高通滤波器的传递特性如下
Sf λ =1?e(?παλc2)λ? 5.3
这个高通高斯滤波器在截止波长处也传递50%。这是很重要的,因为它阐释了高斯低
通和高通在传递上的互补性。这可以表明高频信号与低频信号的差异仅仅表现在原始轮廓。因此用两种不同滤波器同时捕捉高频和低频信号是没有必要的。
5.3用高斯滤波器量化粗糙度、波纹度和形状
滤波器的输出是粗糙度,波纹度还是形状(三者为专业术语),取决于滤波器的类型(高通或者低通)和截止波长的阈值。如之前第3章所述,因为粗糙度,波纹度还是形状都有自己明确定义的带宽范围,所以构造带宽的上限和下限截止波长要符合各自要求。ASME B46.1标准中定义截止波长λcw作为波纹度的长波截止波长,λsw作为波纹度的短波截止波长,λc作为粗糙度的长波截止波长,λs作为粗糙度的短波截止波长。λc的选择等于λsw。ASME B46.1与ISO 11562两者都已经给出了截止波长的推荐阈值。除此之外,他们也提供了进一步的指导对于截止比率的选择。例如,选择λc与一个适当的
λc/λs比率将限制探针的大小 (美国机械工程师协会2002)。
滤波器与截止波长λs相关联构成低通滤波器,与此相对应滤波器与截止波
长λc相关联,则构成一个高通滤波器。上述这对滤波器应用到轮廓上输出的是粗糙度。如果想获得波纹度需要调整到λsw(低通)λcw(高通)。形状通常包含了所有大尺寸波长,因此下端的截止波长为λf,通常来说这样就足够了。但值得注意的是在ASME B46.1标准中并没有定义λf。图5.2举例说明了上述滤波器的不同。
图5.2划分粗糙度轮廓、波纹度轮廓、形状轮廓的五种滤波器的传递特性
(λs=25um,λc=0.8mm,λsw=0.8mm, λcw=8mm, λf=8mm)
综上所述,很显然根据粗糙度或者波纹度的定义,我们需要两个滤波器同时操作来获得。然而事实上有些简单化的公共认可,这样通过一个信号的滤波操作也可以简单的获得粗糙度或者波纹度。首先,截止波长为λs的低通滤波器有时可以被忽略,或者用自动滤波器仪器的初始数据。其次一种情况是,轮廓长度通常并没有足够的长度去捕捉形状,因此截止波长λcw的高通滤波器并没有用到。最后一种状况是,在第5.2部分已经有所提及,利用高斯低通和高通滤波器的互补定义,可以用一个滤波器来评估粗糙度和波纹度(截止波长λc的高通或者低通)。
总的来说,粗糙度轮廓能够通过用一个截止波长为λc的高通滤波器去过滤原始轮廓来获得。波纹度轮廓与原始轮廓和粗糙度轮廓的区别是很简单的。在原始轮廓上应用高斯低通滤波器λsw就以获得波纹度的表面轮廓。同样的这也是粗糙度轮廓与波纹轮廓和原始轮廓之间的区别。无论怎么做,两者产生的结果是一样的。
5.4截止波长的影响
当λc增加,粗糙度轮廓的带宽将变大,因此应该增加振幅参数,例如Ra,来计算粗糙度轮廓。另一方面,同样的截止波长将导致波纹度轮廓中的一些波长被移除,作为这个结果应该在计算波纹度轮廓时,减小振幅参数Wa
5.5相位特性
我们已经非常详细的研究了高斯滤波器的振幅传递特性,但是对于相位特性我们还没
有提及。高斯滤波器并不会使两个不同波长的正弦波产生相对的相位改变。换句话说,每
一个进入滤波器的正弦波形都会复现它进入时的相位特性,并不会发生相位改变。这种相
位不变的特性,也正是高斯滤波器的最大优点。
5.6总结
高斯滤波器可能是今天被用的最广泛的滤波器。我们本章复习了它的定义和实现方法。我也讨论了高通和低通滤波器的定义。而且我们还讨论了高斯高通和低通滤波器是如何互
补的,因此用两个滤波器操作获得粗糙度和波纹度是多余的。高斯滤波器的相位不变性,
使得它的输出不会扭曲变形。
练习
5.1通过对公式5.2的连续采样生成一个高斯低通滤波器曲线。假设λc=0.8mm,采
样间隔?x=1μm。和图5.1 b对比两者相同吗?
5.2生成一个如图5.2所示的图,假设轮廓长度是1,000mm,采样间隔为?x=1μm,截
止波长参考图5.2所示。
5.3写一个高斯函数文件 myGaussian.m,调用该函数需要给两个参数——间隔和截止波长(两者单位相同),然后函数产生一个高斯低通滤波器,这个高斯函数是经过归一化的,为了使所有的权重统一。
5.4用截止波长0.8mm的高斯低通滤波器滤波2mm波长振幅为1μm的曲线z1, 利用
高斯滤波器的振幅传递曲线观察振幅衰减情况。采样间隔参数为?x=1μm。用同样的滤波
器滤波0.5mm波长振幅为0.5μm的曲线z2,观察其振幅衰减状况。
5.5根据练习5.4和已知高斯滤波器的相位特性,计算并绘制滤波输出,高斯滤波器
的滤波轮廓为练习5.4讨论的两个正弦波之和。
5.6用空间卷积验证练习5.4的结果。并用5.3制作的高斯滤波函数生成这个滤波器。
5.7用频域积分验证练习5.4的结果。为了这个窗口能均匀排放这8000长度的数组,需要在高斯滤波器的空间域填补零点。然后对滤波器和轮廓执行DFTs,进行逐项积分。用反向DFT 进行评估并提取相关部分补偿相位(看4.6的例子)。这个波纹度轮廓一定是和
5.5与5.6中产生的轮廓相同,除了在边缘上可能有少许差别。
5.8用空间卷积方法过滤练习3.1中的轮廓z,用三种不同截止波长的低通高斯滤波器,分别是0.5mm,0.8mm和2mm。从波纹度轮廓w 上截取截止长度的一半。n w(i) 计算
波纹度轮廓w中的Wa。其中Wa被定义为Wa=w(i)是波纹度数n组的第i个元素,n是数组
w的长度。随着截止波长的增加是Wa增加还是减小,为什么?
参考文献
美国机械工程协会2002,ASME B46.1-2002,表面纹理(表面粗糙度,波纹度和花
纹),ASME.美国.纽约
国际标准化组织1996,ISO11562:1996,几何产品规格(GPS)-表面纹理:轮廓方式-滤
波器相位调整特性,ISO,瑞士,日内瓦
第6章 2RC滤波器
6.1引言
最早用于表面测量的滤波器是2RC滤波器。这种滤波器早期由硬件构成,现在已经可
以方便使用软件执行。2RC滤波器并不是一个线性相位的滤波器,并且对粗糙度和波纹度
两个滤波器需要区分来看待。尽管2RC滤波器很早就被应用于表面轮廓滤波,但是却在高
斯滤波器之后来讨论它,是因为这种滤波器在执行时更具有挑战性的问题存在。ASME
B46.1标准(美国机械工程协会2002)对2RC滤波器有所提及,但是国际标准中并没有涉及
该滤波器。
6.2 2RC高通滤波器
从历史上来看,2RC滤波器仅仅被用于从原始轮廓中提取粗错度轮廓,因此文献报道
中一般仅提供了2RC的粗糙度滤波器的权重函数。为了获取表面的波纹的轮廓,需要一个
单独的波纹度权重函数(看练习6.1)。高通粗糙度滤波器的权重函数如下:
S x = 2?Aλc exp?(?Aλ c 6.1 λcA x x 其中A=3.64,x是权重函数距离原点的位置,λc是粗糙度长波的截止波长。高通滤波器的传递特性可以通过对其连续传递函数
S(x)做傅里叶变换可以获得: Sf λ =(1?jk?2) 6.2 λcλ其中k=1/ 并且j= 6.1的权
重函数是很重要的。权重函数提供了一个轮廓的高频组成部分,但是空间卷积也是很重要的,它是一个平均处理的过程。对等式6.1的权重函数进行卷积,将得出一个“二等分线”。二等分线和粗糙度轮廓是有区别的。然而从公式6.1并不能很清楚的看出两者的区别,如果读者对此很感兴趣,可以看6.3节,此节将对这个问题作出解释。
2RC滤波器在截止波长处的振幅衰减是75%。从公式6.2推断此时λ=λc。并且滤波
器不具有相位不变的特性。这意味的不同波长的正弦波其输出相位会有不同程度的偏移量。这将导致在输出轮廓上出现失真,因此这并不是一个有用的特性。尽管受此限制2RC滤波
器仍然被用了许多年,因为那时候的数字滤波器不能识别表面轮廓的起点。下面的例子展
示了2RC滤波器的这些方面。
例子6.1绘制权重函数,振幅传输图,高通2RC滤波器的相频特性图。假设截止波长
λc=0.8mm。
2RC滤波器的权重函数被生成在?2λc≤x≤0,因为这个滤波器关于原点并不对称。事实上,滤波器在原点前沿是单边的。
传递特性能够用很多种方式生成,在这个例子中,我们将直接对公式6.2采样。图6.1 a-c分别展示了2RC滤波器的权重函数、振幅传输和相频特性。 lambdac = 0.8; % 截止波长单位 mm
dx = 0.001; % 间隔单位 mm
A = 2 pi/sqrt(3);
x = (-2 lambdac:dx:0)’;
for j=1:1:length(x) % 生成权重函数
S(j,1)=(A/lambdac) (2-(A/lambdac)*abs(x(j)))*
exp(-(A/lambdac) abs(x(j)));
end
S = S/sum(S); % 单位归一化处理
plot(x,S)
xl abel(’Distance (mm)’);
ylabel(’Weighting function’);
lamda = (0.002:0.001:8)’; % 生成波长轴
Sf = (1-i 1/sqrt(3). (lamda/lambdac)).^(-2);
% 对公式6.2连续采样
semilogx(lamda,100*abs(Sf)); % 取绝对值
% amplitude transmission
xlabel(’Wavelength (mm)’);
ylabel(’Amplitude (%)’); % 绘制振幅用“%”
semilogx(lamda, angle(Sf)); % 用角度绘制相位
xlabel(’Wavelength (mm)’);
ylabel(’Phase (radians)’); % 绘制相位单位弧度
图6.1 a 两电阻两电容(2RC)滤波器的权重函数 b 振幅传输特性 c相位特性
例子6.2 用截止波长为0.8mm高通2RC滤波器,按3.1范例中所述的空间卷积方法生成一个滤波轮廓z
2RC高通滤波器关于原点并不对称。因此这个滤波器不得不在卷积的时候做一个关于
原点的镜像来完成卷积过程(回想一下卷积镜像操作的定义;用这个建立的镜像来做卷积
和多项式相乘)。并且卷积后的轮廓长度为n+m-1,其中n是原始轮廓的长度,m是滤波器
数组的长度。就对称的滤波器来说,
来自卷子阵列
中心的n个元素代表了波纹度轮廓,但是就2RC滤波器来说,n个元素代表二等分线。这是因为滤波器数组的原点占有的权重比例最大,并且它是滤波轮廓的起始点。在轮廓结
束端,当滤波器从表面记录时,滤波器的前部是在轮廓表面外边的,这时已经不能评价一
个真实的平均移动了。就高斯滤波器来说,权重最大的点是对称排列在中间的,并且卷积
阵列的中心点在波纹度轮廓时,是被剔除的。图6.2 a展示了原始轮廓,并且和一个二等
分线轮廓。图6.2 b展示了粗糙度轮廓。
图6.2 a用2RC高通滤波器生成的轮廓z和二等分线。b 用2RC高通滤波器生成的轮
廓z和粗糙度轮廓
dx = 0.001;
l = 8;
n = l/dx;
x = (0:dx:l-dx)’;
z1 = 1 sin(2 pi. x/2); % amplitude 1 um, wavelength 2 mm
z2 = 0.5 sin(2 pi. x/0.5); % amplitude 0.5 um, wavelength 0.5 mm
z = z1 + z2;
S = flipud(S); % mirror the non-symmetric weighting
% function
C = conv(S, z); % conv performs a second flip before
% moving average
MeanLine = C(1:n); % extract the first n points
r = z-MeanLine;
plot(x,z,’r’,x,MeanLine,’b’);
xlabel(’Distance (mm)’);
ylabel(’Amplitude (\mum)’);
plot(x,z,’r’,x,r ,’b’);
xlabel(’Distance (mm)’);
ylabel(’Amplitude (\mum)’);
6.3 2RC滤波器的深入介绍
早期使用的2RC滤波器是实时性的。当仪器经过轮廓表面,轮廓上的点以电压信号(Vin)被输入到2RC电路网络。滤波后的信号通过电压(Vout)被输出,并且经过处理转变为高度单位。一个一介的RC滤波器的传递函数(Hf1=Vout/Vin)能够从任何标准的电气工程教科书上获得,其表达式如下:
Hf1=1+jRCw 6.3
其中ω是频率表达是ω=2π/λ,j= R和C分别是电阻和电容。这个传递函数表达了滤波器的传递特性,并且是在频域被定义的(因此,我们根据习惯把这里的f写成Hf)。图6.3展示了一个二介电路网络,其传递函数是一介电路网络函数的平方,因此其公式如下:
Hf2=VVinjRCw=Hf12=(1+jRCw2 6.4 jRCw
2RC滤波器定义了其截止频率λc处的传输为75%。RC的取值在满足这种情况下能够获得通过如下公式。将ω=2π/λ带入等式6.4中,推到得
Hf2 =展开化简并计算得:
RC=λc 2π2=3/4 6.5 6.6
为了在空间域实现这个滤波器,我们需要一个权重函数的表达式。我们能够通过对传递函数进行逆变换来得到这个权重函数。让我们改写这个传递函数:
Hf2=(1?1
jRCω2=1?2RC1jωRC+1(RC)(1jω)2RC 6.7
对其进行傅里叶变换得:
H t =δ t ?RC 2?RC e 6.8 其中δ t 是单位脉冲。
H(t)是2RC滤波器的脉冲响应,其由两部分组成,一个部分是单位脉冲,另一部分是随时间变化的指数。时变部分产生直流部分,脉冲产生瞬时交流部分。DC部分的权重函数能够通过对上式的RC值取代来获得,其公式如下:
S x =λ C 2?λ C e
其中A
=AxA?xAλC1t?tRC, 0≤x
图6.3 RC电路网络 C是电容,R是电阻,Vin输入电压信号,Vout输出电压信号
脉冲响应回答了一个疑问,那就是早期为什么高通2RC滤波器只提供二等分线的权重函数。这是显而易见的,权重函数仅仅捕捉了脉冲响应的DC组成部分。但是瞬时AC响应的组成(粗糙度轮廓)与原始轮廓和DC二等分线相比是有区别的。
最后提及一下,在75%条件下取代RC值的传递函数如下:
Hf2=(jRCω
1+jRCω2=1
(12 6.10
6.4 2RC滤波器和高斯滤波器的比较
一个表面轮廓的例子(d_med-Type D roughness specimen)能够被下载,从美国国家标准技术研究所(NIST)基于表面测量测试系统算法的网站上(美国国家标准技术研究所;Bui 和 Vorburger 2019)。在载入MATLAB之前,要删除开头和结尾的信息(开始的15行和结尾的后2行)。这个轮廓被滤波用一个高斯低通滤波器,其截止波长在0.8mm。这个同样的轮廓被滤波用一个2RC高通滤波器在相同的截止波长。原始轮廓和高斯波纹度轮廓被展示在图6.4a。可以观察到,这个波纹度在波峰和波谷处是没有相位失真的。相应对俄粗糙度轮廓被展示在图6.4b。
原始轮廓和用2RC产生的二等分轮廓(不是波纹度轮廓),在截止波长为
0.8mm时的图像被展示在图6.4c。可以观察到,二等分轮廓移动了一个相位。粗糙度轮廓被展示在图6.4d,因为相位偏移出现了失真(人为规定特性)。
并且应该注意到在图6.4d展示的粗糙度轮廓中,其振幅通常是大于图6.4b所展示的振幅的,尽管两者都是用同样的截止波长生成的。这是因为2RC滤波器截止波长的传输量是75%,对比2RC滤波器,高斯滤波器仅在截止波长处有50的传输量。因此在截止波长处或其附近的波长将被传递通过2RC滤波器,因此其振幅相对较大。
6.5 总结
2RC滤波器是最早用于表面测量的滤波器。最早它被用硬件电路来实现,但是现在它
已经能够方便用数字化来实现。这个滤波器有一些缺陷:(a)在粗糙度轮廓中它有一个相
位的失真(b)粗糙度滤波器和波纹度滤波器需要分开处理(c)最后它有边缘失真现象。在之
后介绍的高斯滤波器相对的可以缓和2RC滤波器的这些缺陷。从第五章可以知道,高斯滤
波器是被数字化实现的。它没用相位失真的影响,并且高通和低通具有互补性,因此可以
仅用一个滤波器来获得粗糙度和波纹度两者轮廓表面。但是高斯滤波器也有边缘失真的问题。
练习
6.1 2RC低通滤波器的传递函数是Hf=(1+jRCω),j= 截止波长处的传输量为75%。
RC=xA2λc1ω=2πλcS x =1(1+jRCω)e?xAλc0≤x≤∞,A=2π Hf==12。
6.2当用一个截止波长为0.8mm的高通2RC滤波器滤波一个波长2mm振幅1μm的正弦轮廓表面时,它的振幅衰减和相位角分别是多少?当滤波一个波长0.5mm振幅0.5μm的
正弦轮廓时,其振幅衰减和相位角又是多少?用高斯滤波器和这些信心重建一个滤波轮廓,对比两者之间的差异。
参考文献
美国机械工程师协会2002,ASME B46.1-2002,表面纹理(表面粗糙度、波纹度和花纹),ASME.纽约,美国
Bui,S.H 和Vorburger,T.V.2019,表面测量算法实验系,精密测量
程,vol.31,no.3,pp.218-225
美国国家标准技术研究所NIST的网络资源:NIST基于网络表面测量算法试验系统网站,网址https://www.doczj.com/doc/ce11320005.html,/VSC/jsp/,使用权日本25,2019.盖思宝,MD,USA 怀
特斯特,DJ,和Reason,R.E.1965,用电磁波滤波器发现表面纹理二分法等式,特勒霍布森.拉斯特,英国
生词和滤波专业词汇总结
Surface profile 表面轮廓
Filter 滤波器
Gaussian filter 高斯滤波器
Long-wavelength roughness cutoff 粗糙度的长波截止波长
Transmission characteristics 传递特性
Fourier transform 傅里叶变换
Amplitude attenuation 振幅衰减 Sinusoid 正弦曲线
Sampling Interval 间隔
High-Pass Filter 高通滤波器
Low-Pass Filter 低通滤波器
Phase characteristics 相频特性 Roughness 轮廓粗糙度
Waviness 轮廓波纹度
Form 轮廓形状度
Phase distortion 相位失真
Sinusoidal 正弦曲线
Surface texture 表面纹理
Gaussian Smoothing Filter 高斯平滑滤波器 一、图像滤波的基本概念 图像常常被强度随机信号(也称为噪声)所污染.一些常见的噪声有椒盐(Salt & Pepper)噪声、脉冲噪声、高斯噪声等.椒盐噪声含有随机出现的黑白强度值.而脉冲噪声则只含有随机的白强度值(正脉冲噪声)或黑强度值(负脉冲噪声).与前两者不同,高斯噪声含有强度服从高斯或正态分布的噪声.研究滤波就是为了消除噪声干扰。 图像滤波总体上讲包括空域滤波和频域滤波。频率滤波需要先进行傅立叶变换至频域处理然后再反变换回空间域还原图像,空域滤波是直接对图像的数据做空间变换达到滤波的目的。它是一种邻域运算,即输出图像中任何像素的值都是通过采用一定的算法,根据输入图像中对用像素周围一定邻域内像素的值得来的。如果输出像素是输入像素邻域像素的线性组合则称为线性滤波(例如最常见的均值滤波和高斯滤波),否则为非线性滤波(中值滤波、边缘保持滤波等)。 线性平滑滤波器去除高斯噪声的效果很好,且在大多数情况下,对其它类型的噪声也有很好的效果。线性滤波器使用连续窗函数内像素加权和来实现滤波。特别典型的是,同一模式的权重因子可以作用在每一个窗口内,也就意味着线性滤波器是空间不变的,这样就可以使用卷积模板来实现滤波。如果图像的不同部分使用不同的滤波权重因子,且仍然可以用滤波器完成加权运算,那么线性滤波器就是空间可变的。任何不是像素加权运算的滤波器都属于非线性滤波器.非线性滤波器也可以是空间不变的,也就是说,在图像的任何位置上可以进行相同的运算而不考虑图像位置或空间的变化。 二、图像滤波的计算过程分析 滤波通常是用卷积或者相关来描述,而线性滤波一般是通过卷积来描述的。他们非常类似,但是还是会有不同。下面我们来根据相关和卷积计算过程来体会一下他们的具体区别: 卷积的计算步骤: (1)卷积核绕自己的核心元素顺时针旋转180度 (2)移动卷积核的中心元素,使它位于输入图像待处理像素的正上方 (3)在旋转后的卷积核中,将输入图像的像素值作为权重相乘 (4)第三步各结果的和做为该输入像素对应的输出像素 相关的计算步骤: (1)移动相关核的中心元素,使它位于输入图像待处理像素的正上方 (2)将输入图像的像素值作为权重,乘以相关核 (3)将上面各步得到的结果相加做为输出 可以看出他们的主要区别在于计算卷积的时候,卷积核要先做旋转。而计算相关过程中不需要旋转相关核。 例如:magic(3) =[8 1 6;3 5 7;4 9 2],旋转180度后就成了[2 9 4;7 5 3;6 1 8]
高斯滤波器理解 先给出高斯函数的图形。 高斯滤波器是一类根据高斯函数的形状来选择权值的线性平滑滤波器。高斯平滑滤波器对于抑制服从正态分布的噪声非常有效。一维零均值高斯函数为: g(x)=exp( -x^2/(2 sigma^2) 其中,高斯分布参数Sigma决定了高斯函数的宽度。对于图像处理来说,常用二维零均值离散高斯函数作平滑滤波器。 高斯函数具有五个重要的性质,这些性质使得它在早期图像处理中特别有用.这些性质表明,高斯平滑滤波器无论在空间域还是在频率域都是十分有效的低通滤波器,且在实际图像处理中得到了工程人员的有效使用.高斯函数具有五个十分重要的性质,它们是: (1)二维高斯函数具有旋转对称性,即滤波器在各个方向上的平滑程度是相同的.一般来说,一幅图像的边缘方向是事先不知道的,因此,在滤波前是无法确定一个方向上比另一方向上需要更多的平滑.旋转对称性意味着高斯平滑滤波器在后续边缘检测中不会偏向任一方向. (2)高斯函数是单值函数.这表明,高斯滤波器用像素邻域的加权均值来代替该点的像素值,而每一邻域像素点权值是随该点与中心点的距离单调增减的.这一性质是很重要的,因为边缘是一种图像局部特征,如果平滑运算对离算子中心很远的像素点仍然有很大作用,则平滑运算会使图像失真. (3)高斯函数的傅立叶变换频谱是单瓣的.正如下面所示,这一性质是高斯函数付立叶变换等于高斯函数本身这一事实的直接推论.图像常被不希望的高频信号所污染(噪声和细纹理).而所希望的图像特征(如边
缘),既含有低频分量,又含有高频分量.高斯函数付立叶变换的单瓣意味着平滑图像不会被不需要的高频信号所污染,同时保留了大部分所需信号. (4)高斯滤波器宽度(决定着平滑程度)是由参数σ表征的,而且σ和平滑程度的关系是非常简单的.σ越大,高斯滤波器的频带就越宽,平滑程度就越好.通过调节平滑程度参数σ,可在图像特征过分模糊(过平滑)与平滑图像中由于噪声和细纹理所引起的过多的不希望突变量(欠平滑)之间取得折衷. (5)由于高斯函数的可分离性,较大尺寸的高斯滤波器可以得以有效地实现.二维高斯函数卷积可以分两步来进行,首先将图像与一维高斯函数进行卷积,然后将卷积结果与方向垂直的相同一维高斯函数卷积.因此,二维高斯滤波的计算量随滤波模板宽度成线性增长而不是成平方增长. ========================== 高斯函数在图像滤波中的应用 1函数的基本概念 所谓径向基函数(Radial Basis Function 简称RBF), 就是某种沿径向对称的标量函数。通常定义为空间中任一点x到某一中心xc之间欧氏距离的单调函数, 可记作k(||x-xc||), 其作用往往是局部的, 即当x远离xc时函数取值很小。最常用的径向基函数是高斯核函数,形式为k(||x-xc||)=exp{- ||x-xc||^2/(2*σ)^2) } 其中xc为核函数中心,σ为函数的宽度参数, 控制了函数的径向作用范围。 2函数的表达式和图形 matlab绘图的代码 alf=3; n=7;%定义模板大小 n1=floor((n+1)/2);%确定中心 for i=1:n a(i)= exp(-((i-n1).^2)/(2*alf^2)); for j=1:n b(i,j) =exp(-((i-n1)^2+(j-n1)^2)/(4*alf))/(4*pi*alf); end end subplot(121),plot(a),title('一维高斯函数' ) subplot(122),surf(b),title('二维高斯函数' )
燕山大学 课程设计说明书 题目:几种平滑滤波器的作用与对比试验设计 学院(系):电气工程学院 年级专业: 学号: 学生姓名: 指导教师: 教师职称:
目录 第一章平滑滤波器 (1) 第二章处理程序和处理结果 (3) 第三章比较差异 (7) 第四章总结 (9) 参考文献 (9)
第一章平滑滤波器 滤波的本义是指信号有各种频率的成分,滤掉不想要的成分,即为滤掉常说 的噪声,留下想要的成分,这即是滤波的过程。 所谓目的:一是抽出对象的特征作为图像识别的特征模式;另一个是为适应图像处理的要求,消除图像数字化时所混入的噪声。 各类图像处理系统在图像的采集、获取、传送和转换(如成像、复制扫描、传输以及显示等)过程中,均处在复杂的环境中,光照、电磁多变,所有的图像均不同程度地被可见或不可见的噪声干扰。噪声源包括电子噪声、光子噪声、斑点噪声和量化噪声。如果信噪比低于一定的水平,噪声逐渐变成可见的颗粒形状,导致图像质量的下降。除了视觉上质量下降,噪声同样可能掩盖重要的图像细节,在对采集到的原始图像做进一步的分割处理时,我们发现有一些分布不规律的椒盐噪声,为此采取相应的对策就是对图像进行必要的滤波降噪处理。图像的噪声滤波器有很多种,常用的有线性滤波器,非线性滤波器。采用线性滤波如邻域平滑滤波,对受到噪声污染而退化的图像复原,在很多情况下是有效的。但大多数线性滤波器具有低通特性,去除噪声的同时也使图像的边缘变模糊了。而另一种非线性滤波器如中值滤波,在一定程度上可以克服线性滤波器所带来的图像模糊问题,在滤除噪声的同时,较好地保留了图像的边缘信息。这些滤波都是通过平滑滤波器来实现的。 平滑滤波是低频增强的空间域滤波技术。它的目的有两类:一类是模糊;另一类是消除噪音。所谓平滑滤波是指对一些不平滑的信号做处理,使它变平滑。那什么是不平滑呢,就是在示波器上看起伏不平的信号,最典型的就是交流整流后的脉动信号。这些随时间起伏不平变化的信号成分在频率上代表一些高频率的成分,上升下降越快,则表示频率越高。平滑滤波就是要把它们弄平,把它们弄得不再随时间变化,或者是变化很小,这种不随时间再变化,或者随时间变化很小的信号就是频率非常低的信号,使它们成为低频信号,在整流滤波上,就基本上直流信号,其中只含有非常少的成分随时间变化。所以平滑滤波与低通滤波说法差别不大,平滑滤波大多用在整流滤波上,一般可以理解成一个概念的不同描述方法。 图像在传递过程中,由于噪声主要集中在高频部分,为去除噪声改善图像质量,滤波器采用低通滤波器H(u ,v)来抑制高频成分,通过低频成分,然后再进行逆傅立叶变换获得滤波图像,就可达到平滑图像的目的 根据任务要求在此选择研究理想低通滤波器、Butterworth 低通滤波器、高斯低通滤波器三种滤波器来实现要求。 1.理想低通滤波器 设傅立叶平面上理想低通滤波器离开原点的截止频率为D0,则理想低通滤波器的传递函数: 1 (,)(,)0 (,)D u v D H u v D u v D ≤?=?>?
基于MATLAB的带噪图像的高斯滤波 摘要:图像常常被强度随机信号(也称为噪声)所污染.一些常见的噪声有椒盐(Salt & Pepper)噪声、脉冲噪声、高斯噪声等.椒盐噪声含有随机出现的黑白强度值.而脉冲噪声则只含有随机的白强度值(正脉冲噪声)或黑强度值(负脉冲噪声).与前两者不同,高斯噪声含有强度服从高斯或正态分布的噪声.研究滤波就是为了消除噪声干扰。图像滤波总体上讲包括空域滤波和频域滤波。频率滤波需要先进行傅立叶变换至频域处理然后再反变换回空间域还原图像,空域滤波是直接对图像的数据做空间变换达到滤波的目的。它是一种邻域运算,即输出图像中任何像素的值都是通过采用一定的算法,根据输入图像中对用像素周围一定邻域内像素的值得来的。如果输出像素是输入像素邻域像素的线性组合则称为线性滤波(例如最常见的均值滤波和高斯滤波),否则为非线性滤波(中值滤波、边缘保持滤波等)。线性平滑滤波器去除高斯噪声的效果很好,且在大多数情况下,对其它类型的噪声也有很好的效果。线性滤波器使用连续窗函数内像素加权和来实现滤波。特别典型的是,同一模式的权重因子可以作用在每一个窗口内,也就意味着线性滤波器是空间不变的,这样就可以使用卷积模板来实现滤波。如果图像的不同部分使用不同的滤波权重因子,且仍然可以用滤波器完成加权运算,那么线性滤波器就是空间可变的。任何不是像素加权运算的滤波器都属于非线性滤波器.非线性滤波器也可以是空间不变的,也就是说,在图像的任何位置上可以进行相同的运算而不考虑图像位置或空间的变化。 关键词:图像,高斯滤波,去噪,MATLAB 1.引言 20世纪20年代,图像处理首次得到应用。上个世纪60年代中期,随着计算机科学的发展和计算机的普及,图像处理得到广泛的应用。60年代末期,图像处理技术不断完善,逐渐成为一个新兴的学科。图像处理中输入的是质量低的图像,输出的是改善质量后的图像。为了改善图像质量,从图像中提取有效信息,必须对图像进行去噪预处理。根据噪声频谱分布的规律和统计特征以及图像的特点,出现了多种多样的去噪方法。经典的去噪方法有:空域合成法,频域合成法和最优
高斯滤波器是一类根据高斯函数的形状来选择权值的线性平滑滤波器。高斯平滑滤波器对于抑制服从正态分布的噪声非常有效。一维零均值高斯函数为: g(x)=exp( -x^2/(2 sigma^2) 其中,高斯分布参数Sigma决定了高斯函数的宽度。对于图像处理来说,常用二维零均值离散高斯函数作平滑滤波器。 高斯函数具有五个重要的性质,这些性质使得它在早期图像处理中特别有用.这些性质表明,高斯平滑滤波器无论在空间域还是在频率域都是十分有效的低通滤波器,且在实际图像处理中得到了工程人员的有效使用.高斯函数具有五个十分重要的性质,它们是: (1)二维高斯函数具有旋转对称性,即滤波器在各个方向上的平滑程度是相同的.一般来说,一幅图像的边缘方向是事先不知道的,因此,在滤波前是无法确定一个方向上比另一方向上需要更多的平滑.旋转对称性意味着高斯平滑滤波器在后续边缘检测中不会偏向任一方向. (2)高斯函数是单值函数.这表明,高斯滤波器用像素邻域的加权均值来代替该点的像素值,而每一邻域像素点权值是随该点与中心点的距离单调增减的.这一性质是很重要的,因为边缘是一种图像局部特征,如果平滑运算对离算子中心很远的像素点仍然有很大作用,则平滑运算会使图像失真. (3)高斯函数的傅立叶变换频谱是单瓣的.正如下面所示,这一性质是高斯函数付立叶变换等于高斯函数本身这一事实的直接推论.图像常被不希望的高频信号所污染(噪声和细纹理).而所希望的图像特征(如边缘),既含有低频分量,又含有高频分量.高斯函数付立叶变换的单瓣意味着平滑图像不会被不需要的高频信号所污染,同时保留了大部分所需信号.(4)高斯滤波器宽度(决定着平滑程度)是由参数σ表征的,而且σ和平滑程度的关系是非常简单的.σ越大,高斯滤波器的频带就越宽,平滑程度就越好.通过调节平滑程度参数σ,可在图像特征过分模糊(过平滑)与平滑图像中由于噪声和细纹理所引起的过多的不希望突变量(欠平滑)之间取得折衷. (5)由于高斯函数的可分离性,较大尺寸的高斯滤波器可以得以有效地实现.二维高斯函数卷积可以分两步来进行,首先将图像与一维高斯函数进行卷积,然后将卷积结果与方向垂直的相同一维高斯函数卷积.因此,二维高斯滤波的计算量随滤波模板宽度成线性增长而不是成平方增长. ========================== 高斯函数在图像滤波中的应用 1函数的基本概念 所谓径向基函数(Radial Basis Function 简称RBF), 就是某种沿径向对称的标量函数。通常定义为空间中任一点x到某一中心xc之间欧氏距离的单调函数, 可记作k(||x-xc||), 其作用往往是局部的, 即当x远离xc时函数取值很小。最常用的径向基函数是高斯核函数,形式为k(||x-xc||)=exp{- ||x-xc||^2/(2*σ)^2) } 其中xc为核函数中心,σ为函数的宽度参数, 控制了函数的径向作用范围。 2函数的表达式和图形 matlab绘图的代码 alf=3; n=7;%定义模板大小 n1=floor((n+1)/2);%确定中心 for i=1:n a(i)= exp(-((i-n1).^2)/(2*alf^2));
椭圆低通滤波器
线性平滑滤波器 1.3 指数型低通滤波器(ELPF) I1=imread('eight.tif'); %读取图像 I2=im2double(I1); I3=imnoise(I2,'gaussian',0.01); I4=imnoise(I3,'salt & pepper',0.01); figure,subplot(1,3,1); imshow(I2) %显示灰度图像 title('原始图像'); %为图像添加标题 subplot(1,3,2); imshow(I4) %加入混合躁声后显示图像
title('加噪后的图像'); s=fftshift(fft2(I4));%将灰度图像的二维不连续Fourier 变换的零频率成分 移到频谱的中心 [M,N]=size(s); %分别返回s的行数到M中,列数到N中n1=floor(M/2); %对M/2进行取整 n2=floor(N/2); %对N/2进行取整 d0=40; for i=1:M for j=1:N d=sqrt((i-n1)^2+(j-n2)^2); %点(i,j)到傅立叶变换中心的距离 h=exp(log(1/sqrt(2))*(d/d0)^2); s(i,j)=h*s(i,j); %ILPF滤波后的频域表示 end end s=ifftshift(s); %对s进行反FFT移动 s=im2uint8(real(ifft2(s))); %对s进行二维反离散的Fourier变换后,取 复数的实部转化为无符号8位整数 subplot(1,3,3); %创建图形图像对象 imshow(s); %显示ILPF滤波后的图像 title('ELPF滤波后的图像(d=40)'); 运行结果: 1.4 梯形低通滤波器(TLPF) I1=imread('eight.tif'); %读取图像 I2=im2double(I1); I3=imnoise(I2,'gaussian',0.01);
基于FPGA的GMSK调制之高斯滤波器设计 先生成一个50kbps码率的源(带宽为25KHz),码元1编码成7FFFH(+1)发送,码元0编码成80000H(-1)发送。利用SystemView制作一个采样频率为500KHz 的低通高斯滤波器,把生成的21阶滤波器系数做成.coe文件(如IIR filter 的datasheet要求)加载到IP Core中生成所需低通滤波器。 最后将码元通过高斯滤波器进行滤波。 SystemView生成的高斯滤波器时域波形图: SystemView生成的高斯滤波器频域波形图:
功能仿真波形如下。连续发送的码元为1011101001010101,最后通过高斯滤波后得到的平滑的波形如下,与原始码元型号一一对应。
布局布线后仿真的波形如下。可以看到有明显的毛刺。 Verilog程序: module gmsktop(CLK,clk_50,RST,RDY,dout); input CLK;//主时钟信号,500KHz input clk_50;//50KHz时钟信号 input RST; //input ND; output RDY; output[33:0] dout; wire ND,RFD; wire[15:0] source; sent_source sent_source(clk_50,RST,ND,RFD,source); gsfir gsfir(ND,RDY,CLK,RST,RFD,source,dout); endmodule module sent_source(clk_50,RST,ND,RFD,source); input clk_50;//50KHz时钟信号 input RST;//复位信号,高电平有效 input RFD;
高斯平滑滤波器 SYxxxxxxx XX 一、实验名称:实现高斯平滑滤波器 选择几个不同的σ( 至少5个)对一幅图像进行滤波,观测不同的值对图像的平滑程度(注意σ取值与窗函数大小的关系)。并说明如何为一幅图像选择合适的σ值。 二、高斯平滑滤波器实现原理 1、高斯(核)函数 高斯核函数一种最常用的径向基函数,形式为 22(||||)exp{||||/2*}c k x x x xc σ-=-- (1) 图1 其中x c 为核函数中心,σ为函数的宽度参数 , 控制了函数的径向作用范围。所谓径向基函数 (Radial Basis Function 简称 RBF), 就是某种沿径向对称的标量函数 通常定义为空间中任一点x 到某一中心x c 之间欧氏距离的单调函数 , 可记作 k(||x -x c ||), 其作用往往是局部的 , 即当x 远离x c 时函数取值很小。 高斯函数具有五个重要的性质,这些性质使得它在早期图像处理中特别有用.这些性质表明,高斯平滑滤波器无论在空间域还是在频率域都是十分有效的低通滤波器,且在实际图像处理中得到了工程人员的有效使用.高斯函数具有五个十分重要的性质,它们是: (1)二维高斯函数具有旋转对称性,即滤波器在各个方向上的平滑程度是相同的.一般来说,一幅图像的边缘方向是事先不知道的,因此,在滤波前是无法确定一个方向上比另一方向上需要更多的平滑.旋转对称性意味着高斯平滑滤波器在后续边缘检测中不会偏向任一方向. (2)高斯函数是单值函数.这表明,高斯滤波器用像素邻域的加权均值来
代替该点的像素值,而每一邻域像素点权值是随该点与中心点的距离单调增减的.这一性质是很重要的,因为边缘是一种图像局部特征,如果平滑运算对离算子中心很远的像素点仍然有很大作用,则平滑运算会使图像失真. (3)高斯函数的付立叶变换频谱是单瓣的.正如下面所示,这一性质是高斯函数付立叶变换等于高斯函数本身这一事实的直接推论.图像常被不希望的高频信号所污染(噪声和细纹理).而所希望的图像特征(如边缘),既含有低频分量,又含有高频分量.高斯函数付立叶变换的单瓣意味着平滑图像不会被不需要的高频信号所污染,同时保留了大部分所需信号. (4)高斯滤波器宽度(决定着平滑程度)是由参数σ表征的,而且σ和平滑程度的关系是非常简单的.σ越大,高斯滤波器的频带就越宽,平滑程度就越好.通过调节平滑程度参数σ,可在图像特征过分模糊(过平滑)与平滑图像中由于噪声和细纹理所引起的过多的不希望突变量(欠平滑)之间取得折衷. (5)由于高斯函数的可分离性,大高斯滤波器可以得以有效地实现.二维高斯函数卷积可以分两步来进行,首先将图像与一维高斯函数进行卷积,然后将卷积结果与方向垂直的相同一维高斯函数卷积.因此,二维高斯滤波的计算量随滤波模板宽度成线性增长而不是成平方增长. 2、高斯平滑滤波器的设计——直接法 离散高斯分布: 22()2[,].i j g i j ce σ+-= 222 ()2[,] .i j g i j e c σ+- = 例如,选ó2=2,n=7,在[0,0]处的值等于产生数组(1),左上角值定义为1并取整,见数组(2): (1) (2) 数组(2)即为一个7*7的高斯模板 三、实验 1.分析σ大小与窗口大小的关系 选取不同参数σ的高斯滤波模板,平滑的效果是有差别的,实际上σ越大,
%%%%%%%%%%%%%% 添加高斯噪音并用低通滤波器进行滤除[filename pathname]=uigetfile; img=imread(strcat(pathname,filename)); figure(1); subplot(221); imshow(img); imgSave=img; [m n k]=size(img); delta=0.1; u=0; sizeimg=size(img); GaussNoise=randn(sizeimg); %载入数据在0~1之间的double类型,后面比较好处理 img=im2double(img); img=img+delta*GaussNoise+u; %为了显示结果,可以将数据转变回来,也可以不进行这不操作img=uint8(255*img); subplot(222); imshow(img); title('gaussion noise:delta=0.1,mean=0'); imgNoise=imgSave; imgNoise=imnoise(imgNoise,'gaussian',0.01); subplot(223); imshow(imgNoise); title('imnoise to add gaussian noise'); %%%%%%%%% 对图像做高斯滤波 img=rgb2gray(img); [m,n,k]=size(img); imgfft=fftshift(fft2(double(img))); sigma=50; for i=1:m for j=1:n r=sqrt((i-round(m/2))^2+(j-round(n/2))^2); g=exp(r^2/(2*sigma^2)*(-1)); %g=0.5; for t=1:k imgfft(i,j,k)=imgfft(i,j,k)*g; end; end; end; imgifft=ifft2(ifftshift(imgfft));
import cv2 import math import numpy as np import matplotlib.pyplot as plt #高斯平滑滤波器(高斯低通滤波器)与均值滤波器区别不大,只不过是将均值改为正态函数作为权值 img = cv2.imread("E:/test1.pgm",0) #建立一个代用的空数组(我们用他们来存储处理后的图片) img_1 = np.zeros((256, 256),np.uint8) img_2 = np.zeros((256, 256),np.uint8) img_3 = np.zeros((256, 256),np.uint8) #建立一个代用的空数组(我们在滤波时使用的是加过一圈黑框的图片) arr_1 = np.zeros((258, 258),np.uint8) arr_2 = np.zeros((260, 260),np.uint8) arr_3 = np.zeros((262, 262),np.uint8) for x in range(0, 256): for y in range(0, 256): arr_1[x + 1, y + 1] = img[x, y] for x in range(0, 256): for y in range(0, 256): arr_2[x + 2, y + 2] = img[x, y] for x in range(0, 256): for y in range(0, 256): arr_3[x + 3, y + 3] = img[x, y] #在进行滤波处理之前要先产生高斯平滑滤波器 gauss_1 = np.zeros((3, 3)) gauss_2 = np.zeros((5, 5)) gauss_3 = np.zeros((7, 7)) mysum = 0 for x in range(0, 3): for y in range(0, 3): gauss_1[x, y] = (1/ (3* np.pi))* math.exp(-1*(math.pow(x - 1.5, 2)+ math.pow(y - 1.5, 2))/ 3) mysum = mysum + gauss_1[x, y] for x in range(0, 3): for y in range(0, 3): gauss_1[x, y] = gauss_1[x, y]/mysum mysum = 0 for x in range(0, 5): for y in range(0, 5): gauss_2[x, y] = (1/ (3* np.pi))* math.exp(-1*(math.pow(x - 2.5, 2)+ math.pow(y - 2.5, 2))/ 3) mysum = mysum + gauss_2[x, y]
方法一: clc; a=imread('yuan.bmp'); %读取图像矩阵 figure(1); imshow(a);%显示原始图像 b=double(a);%对图像矩阵进行处理 %disp(b); [m,n]=size(b); tem=[1 1 2 1 1;1 2 4 2 1;2 4 8 4 2;1 2 4 2 1;1 1 2 1 1];%高斯5*5的模板。for i=3:m-2 %不处理边缘的像素点。 for j=3:n-2 t=0; for x=1:5 for y=1:5 t=t+tem(x,y)*b(i-3+x,j-3+y);%对每一个点进行线性叠加。 end end t=t/52;%乘以系数。也就是平滑度 if t>255 %不能大于255,也不能小于0 t=255; elseif t<0 t=0; end b(i,j)=t; end end figure(2); disp(b); b=uint8(b);%复原,没有这一项处理,最后显示的就是一张空白。imshow(b);%显示处理后的图像。
以上程序是仿照c++程序写的,搞了几天,才有结果的,在显示图像的时候老是出现问题,不是黑图,就是白图,原来是范围的问题,读出;来的矩阵范围太小,转化为更大的,转化后再转化回来。下面是关于数据范围的说明,希望有帮助。imshow和image: 图像的显示是最为重要的,用imshow和image都可以显示图像,但是有一定的区别。用的不对,就会象我最初一样,老是出错,或者得到一张空白图或者是彩色图显示成颗粒状、反相黑白图等等。image是用来显示附标图像,即显示的图像上有x,y坐标轴的显示,可以看到图像的像素大小。imshow 只是显示图像。它们都可以用subplot来定位图像显示的位置,用colormap来定义图像显示用的颜色查找表,比如用colormap(pink),可以把黑白图像显示成带粉红色的图像,很有趣的。在这里最值得注意的是要显示的图像像素矩阵的数据类型。显示真彩色图像像素三维矩阵X,如果是uint8类型,要求矩阵的数据范围为0-255,如果是double型,则其数据范围为0-1,要不就会出错或者出现空白页。类型转换很简单,如果你原来的数值是uint8,在运算中转换为double 后,实际要显示的数值没有改变的话,只要用uint8(X)就可转换为uint8型,如果不想转换频繁,也可在显示时用X/255来转换为符合0-1double类型范围要求的数值显示。如果显示索引图像(二维矩阵),因为不同数据类型对应颜色查找表colormap的基点不同,会有所区别,如果不对的话,会出现很多意外的显示效果的。如果索引图像像素数值是double型,则它的取值范围为1-length(colormap),数值起点为1,则矩阵中数值为1的对应colormap中第一行数据,如果索引图像像素数值是uint8,则取值范围为0-255,数值起点为0,则矩阵中数值为0的对应colormap中第一行数据,所以索引图像这两个数据类型之间的转换,要考虑到+1或-1。直接用uint8或double转换则会查找移位,产生失真情况。uint16数据类型与uint8类似,取值范围为0-65536。 方法二; %图像高斯平滑滤波处理 img=imread('1.jpg'); f=rgb2gray(img); subplot(1,2,1); imshow(f);
四种低通滤波器: 一、理想低通滤波器 I=imread('bb.jpg'); T=rgb2gray(I); figure(1); subplot(1,2,1),imshow(uint8(I)); title('原图像'); subplot(1,2,2),imshow(uint8(T)); title('理想低通滤波所得图像'); [f1,f2]=freqspace(size(T),'meshgrid'); H=ones(size(T)); r=sqrt(f1.^2+f2.^2); H(r>0.1)=0; Y=fft2(double(T)); Y=fftshift(Y); Ya=Y.*H; Ya=ifftshift(Ya); I=ifft2(Ya); figure(2); surf(H,'Facecolor','interp','Edgecolor','none','Facelighting','phong'); title('频谱图');
二、巴特沃斯低通滤波器 I=imread('bb.jpg'); T=rgb2gray(I); figure(1); subplot(1,2,1),imshow(uint8(I)); title('原图像'); subplot(1,2,2),imshow(uint8(T)); title('巴特沃斯低通滤波所得图像'); [f1,f2]=freqspace(size(T),'meshgrid'); D=0.3; r=f1.^2+f2.^2; n=4; for i=1:size(T,1) for j=1:size(T,2) t=r(i,j)/(D*D); H(i,j)=1/(t^n+1); end end Y=fft2(double(T)); Y=fftshift(Y); Ya=Y.*H; Ya=ifftshift(Ya); I=real(ifft2(Ya)); figure(2); surf(H,'Facecolor','interp','Edgecolor','none','Facelighting','phong'); title('频谱图');
基于高斯滤波器的图像平滑处理 图像平滑处理的原因:在采集,传输及处理图像的过程中往往会存在一定程度的噪声干扰,噪声恶化了图像的质量,使得图像模糊,淹没了特征,给图片分析带来困难。图像平滑是一种实用的图像处理技术,能消除图像采集,传输及处理过程中的噪声,高斯平滑处理是一种常用的平滑处理方法。 基本思想:高斯滤波是将输入数组的每一个像素点与高斯内核卷积将卷积和当作输出像素值。高斯核相当于对输出像素的邻域赋予不同的权值,输出像素点所在位置的权值最大。 基本原理:平滑要使用滤波器一般使用线性滤波器,其统一形式如下 其中h称为滤波器的核函数也就是权值 使用3*3的高斯核 则计算公式如下: g(x,y)={f(x-1,y-1)+f(x-1,y+1)+f(x+1,y-1)+f(x+1,y+1)+[f(x-1,y)+f(x,y-1)+f(x+1,y)+f(x,y+1)]*2+f(x,y)*4}/16; 其中,f(x,y)为图像中(x,y)点的灰度值,g(x,y)为该点经过高斯滤波后的值。 OpenCV平滑处理函数:void cvSmooth(const CvArr* src,CvArr* dst,int smoothtype=CV_GAUSSIAN,int param1,int param2 ,
Double param3,double param4) 代码: //#include "stdafx.h" #include
低通无源滤波器仿真与分析 、滤波器定义 所谓滤波器( filter ),是一种用来消除干扰杂讯的,对输入或输出的信号中特定频率的频点或该频点以外的频率进行有效滤除的,就是滤波器,其功能就是得到一个特定频率或消除一个特定频率。一般可实为一个可实现的线性时不变系统。 二、滤波器的分类 常用的滤波器按以下类型进行分类。 1) 按所处理的信号: 按所处理的信号分为和两种。 2) 按所通过信号的频段 按所通过信号的频段分为低通、高通、带通和带阻滤波器四种。低通滤波器:它允许信号中的低频或直流分量通过,抑制高频分量或干扰和噪声。 高通滤波器:它允许信号中的高频分量通过,抑制低频或直流分量。带通滤波器:它允许一定频段的信号通过,抑制低于或高于该频段的信号、干扰和噪声。 带阻滤波器:它抑制一定频段内的信号,允许该频段以外的信号通过。 3) 按所采用的元器件 按所采用的分为无源和两种。 :仅由(R、L 和C)组成的滤波器,它是利用电容和电感元件的随频率的变化而变化的构成的。这类滤波器的优点是:电路比较简单,不需要直流电源供电,可靠性高;是:通带内的信号有能量损耗,负载效应比较明显,使用电感元件时容易引起电磁感应,当电感L 较大时滤波器的和重量都比较大,在低频域不适用。 有源滤波器:由无源元件(一般用R和C)和(如集成运算放大器) 组成。这类滤波器的优点是:通带内的信号不仅没有能量损耗,而且还可以放大,负载效应不明显,多级相联时相互影响很小,利用级联的简单方法很容易构成高阶滤波器,并且滤波器的体积小、重量轻、不需要磁屏蔽(由于不使用电感元件) ;缺点是:通带范围受有源器件(如集成运算放大器)的带宽限制,需要直流电源供电,可靠性不如无源滤波器高,在、高频、大功率的场合不适用。 4) 按照阶数来分 通过传递函数的阶数来确定滤波器的分类。 三、网络的频率响应 在时域中,设输入为 x(t) ,输出为 y(t ) ,滤波器的脉冲响应函数为 h(t ) 。转换到频域,激励信号为 X(j ) ,经过一个线性网络得到的响应信号为 Y( j )
基于高斯滤波器的人脸识别方法 曲金帅[1],赵明玺[1],范菁[1],何远斐[1] 云南省高校无线传感器网络重点实验室,云南昆明,650031 摘要:人脸识别是根据某些标识对人进行身份识别,来达到监督、管理和识别目的的一种技术。近年来对这项技术进行了广泛而深入的研究,Gabor变换因其良好的时频局部化特性,能够提供最为实质的人脸特征、削弱噪声的干扰、减少计算量,因此将小波变换应用于人脸识别与检测具有良好的发展前景。由于人脸变化的诸多不确定因素,以及外部环境如光照等对成像系统的影响,使得人脸定位与识别具有极高的难度。另外人脸识别存在动态性和复杂性的特点,给数据处理带来诸多不便,限制了人脸识别的效率,本文借鉴了Gabor滤波和高斯滤波及人工神经网络的人脸识别的两种算法,并通过MATLAB编程实现了对其算法的验证,对实验数据计算得出了两个主要指标灵敏度和阳性预测值。结果前一种算法对人脸数较少的处理效果更好,后一种算法适合处理人脸数较多的图像。 关键词:人脸识别、Gabor滤波器、高斯滤波器 Face recognition method based on Gaussian filter Qu Jinshuai1,Chen Nan1,Fan Jing1,He Yuanfei[1] University Key Laboratory of Wireless Sensor Networks in Yunnan Province, Yunnan University of Nationalities,Kunming 650031, Yunnan, P.R.China ABSTRACT:Face recognition is based on the identification of some person identification, to achieve a technical oversight , management and identification purposes . In recent years, the technology has been extensive and in-depth research , Gabor transform its good time-frequency localization features to provide the most substantial facial features, and weaken the interference noise , reduce the computation , so the wavelet transform is applied Face recognition and detection has good prospects for development. Due to many uncertainties affecting the face changes , as well as the external environment , such as light and other imaging systems , making the face location and recognition with a high degree of difficulty. In addition there is a dynamic and complex recognition of the characteristics of data processing inconvenience to limit the recognition efficiency , the paper draws on two Gabor filtering and Gaussian filtering algorithms and artificial neural networks face recognition , MATLAB programming through its algorithm to validate the experimental data of the two main indicators calculated sensitivity and positive predictive value . Results Before an algorithm for face fewer treatment better, after a few more algorithm processing facial image fit. Keywords : face recognition , Gabor filters, Gaussian filter 基金项目“云南民族地区水质监测无线网状传感器网络跨层机制研究”(国家自然科学基金60963026);“基于3S的云南泥石流监测异构无线传感器网络融合机制研究”(国家自然科学基金61163061);“异构无线传感器网络安全可信协议及密钥算法研究”(云南省应用基础科学研究计划项目2011FZ174). 第一作者简介曲金帅(1989-),男,硕士研究生,主要研究方向:无线传感器网络E-mail:864693787@https://www.doczj.com/doc/ce11320005.html,. 通信作者:赵明玺(1983-),男,博士研究生,讲师.主要研究方向:信号处理,模式识别.