杠杆动态平衡的几种类型
- 格式:doc
- 大小:535.00 KB
- 文档页数:6
杠杆动态平衡1、杠杆的平衡条件动力×动力臂=阻力×阻力臂写成公式F1l1=F2l22、杠杆的再平衡杠杆是否平衡取决于力和力臂的乘积是否相等。
判断方法一:比较末状态时力和力臂的乘积是否相等:若相等则继续平衡;若不相等,哪端乘积大,哪端下沉,另一端上升。
判断方法二:直接比较两端力和力臂的乘积的减小量或增加量是否相等而判断。
注意:若力臂的关系未知,则可通过杠杆的初始状态的平衡关系来确定。
3、杠杆的动态平衡(1)力不变改变力臂当力臂减小相同的长度时,力小的那一端下沉;∵F1l1=F2l2(l1>l2)∴F1<F2F1(l1-l0)=F1l1-F1l0;F2(l2-l0)=F2l2-F2l0∵F1l0<F2l0∴F1l1-F1l0>F2l2-F2l0即:F1(l1+l0)>F2(l2+l0)当力臂增大相同的长度时,力大的那一端下沉;∵F1l1=F2l2(l1>l2)∴F1<F2F1(l1+l0)=F1l1+F1l0;F2(l2+l0)=F2l2+F2l0∵F1l0<F2l0∴F1l1+F1l0<F2l2+F2l0即:F1(l1+l0)<F2(l2+l0)力臂成比例增减的时候杠杆仍然平衡。
∵F1l1=F2l2F1nl1=n F1l1F2nl2=nF2l2∴F1nl1=F2nl2(顺口溜:近小大,远大大,比例增减无变化)(2)力臂不变改变力当增大相同的力时,力臂大的那一端下沉;∵F1l1=F2l2(l1>l2)∴F1<F2(F1+F0)l1=F1l1+F0l1;(F2+F0)l2=F2l2+F0l2∵F0l1>F0l2∴F1l1+F0l1>F2l2+F0l2即:(F1+F0)l1>(F2+F0)l2当减小相同的力时,力臂小的那一端下沉;∵F1l1=F2l2(l1>l2)∴F1<F2(F1-F0)l1=F1l1-F0l1;(F2-F0)l2=F2l2-F0l2∵F0l1>F0l2∴F1l1-F0l1<F2l2-F0l2即:(F1-F0)l1<(F2-F0)l2力的大小成比例增减时杠杆仍然平衡。
杠杆动态平衡的几种类型杠杆动态平衡是指构成杠杆的某些要素发生变化,而杠杆仍处于静止状态或匀速转动状态,分析杠杆的动态平衡时,一般是动中取静,根据杠杆平衡条件,分析比较,得出结论。
下面就杠杆动态平衡问题归类分析。
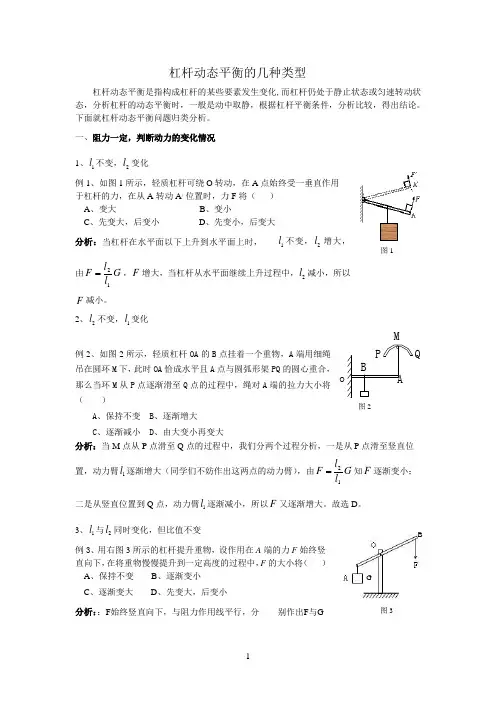
一、阻力一定,判断动力的变化情况 1、1l 不变,2l 变化例1、如图1所示,轻质杠杆可绕O 转动,在A 点始终受一垂直作用 于杠杆的力,在从A 转动A / 位置时,力F 将( ) A 、变大 B 、变小C 、先变大,后变小 D、先变小,后变大 1l 不变,2l 增大,分析:当杠杆在水平面以下上升到水平面上时, 由G l l F 12=,F 增大,当杠杆从水平面继续上升过程中,2l 减小,所以F 减小。
2、2l 不变,1l 变化例2、如图2所示,轻质杠杆OA 的B 点挂着一个重物,A 端用细绳吊在圆环M 下,此时OA 恰成水平且A 点与圆弧形架PQ 的圆心重合,那么当环M 从P 点逐渐滑至Q 点的过程中,绳对A 端的拉力大小将( )A 、保持不变B 、逐渐增大C 、逐渐减小D 、由大变小再变大分析:当M 点从P 点滑至Q 点的过程中,我们分两个过程分析,一是从P 点滑至竖直位 置,动力臂1l 逐渐增大(同学们不妨作出这两点的动力臂),由G l l F 12=知F 逐渐变小; 二是从竖直位置到Q 点,动力臂1l 逐渐减小,所以F 又逐渐增大。
故选D 。
3、1l 与2l 同时变化,但比值不变例3、用右图3所示的杠杆提升重物,设作用在A 端的力F 始终竖直向下,在将重物慢慢提升到一定高度的过程中,F 的大小将( ) A 、保持不变 B 、逐渐变小 C 、逐渐变大 D 、先变大,后变小 分析::F 始终竖直向下,与阻力作用线平行,分别作出F 与G图1BoP M QA图12图2 图3BG的力臂1l 和2l ,构建两个相似三角形(同学们不妨在图中作出),可以看出,OAOBl l =21为定值,由杠杆平衡条件,21Gl Fl =,得G l l F 12=,所以,F 大小不变。

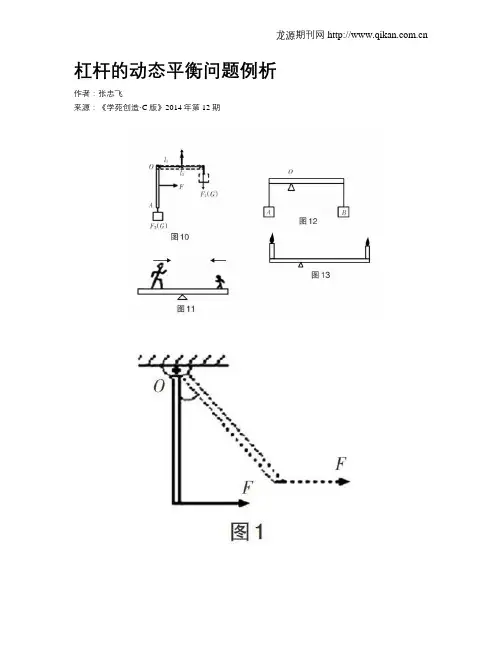
杠杆的动态平衡问题例析作者:张忠飞来源:《学苑创造·C版》2014年第12期杠杆的动态平衡问题,因题目条件的各种不同表述,显得极为繁杂。
但其实,只要抓住杠杆平衡问题的关键——杠杆的平衡条件F1l1=F2l2作为判断依据,便可分析杠杆平衡条件中的力、力臂的变化类型及变化趋势,使杠杆动态平衡问题迎刃而解。
本文将列举几组典型例题,将之分为再平衡和不再平衡两类,以杠杆的平衡条件F1l1=F2l2作为根本方法,对例题进行一一解析,帮助同学们突破杠杆动态平衡的难点。
一、再平衡问题1.单一力不变【例题】如图1,重为G的均匀木棒竖直悬于O点,在其下端施一水平拉力F,让木棒缓慢转到图中虚线所示位置。
在转动的过程中()。
A. 动力臂逐渐变大B. 阻力臂逐渐变小C. 动力F逐渐变大D. 动力F逐渐变小解析:杠杆在转动过程中,一直保持平衡状态,从图2可以看出,F2(G)不变,l2变大,l1变小,根据杠杆平衡条件F1l1=F2l2,则F1(F)变大。
故答案为C。
小结:从题目条件中找出,杠杆再次平衡时,平衡条件中的不变量为阻力G;变量阻力臂l2变大,动力臂l1变小,从而可知动力F的变化趋势。
【变式】如图3所示,轻质杠杆一端因受始终在水平方向上的力F作用而被逐步抬起,在此过程中F及力臂的大小变化分别是()。
A. 变大、变大B. 变大、变小C. 变小、变大D. 变小、变小解析:杠杆抬起至水平的过程中始终保持平衡状态,从图4可以看出,F2(G)不变,阻力臂l2变大,动力臂l1变小,由杠杆平衡条件,知F1(F)变大。
故答案为B。
2.单一力、力臂不变【例题】如图5所示,有一质量不计的长木板,左端可绕O点转动,在它的右端放一重为G的物块,并用一竖直向上的力F拉着,当物块向左匀速滑动时,木板始终在水平位置保持静止,在此过程中,拉力F()。
A. 变小B. 变大C. 不变D. 先变大后变小解析:物块运动时,杠杆一直保持平衡状态,从图6可以看出,l1、F2(G)不变,l2变小,由杠杆平衡条件,得F1(F)变小。
高中物理动态平衡的五种方法高中物理动态平衡的五种方法在高中物理学习中,学生将会接触到动态平衡的概念。
动态平衡是物体在运动时所保持的平衡状态。
为了实现动态平衡,有五种不同的方法可以被应用。
以下是这五种方法:1. 改变质量分布这种方法利用物体内部的不同密度,改变它们的分布来实现动态平衡。
例如,在高速列车上运行时,车轮被制作成多层复合材料,每层都具有不同的密度。
也就是说,物体的重量分布被专门设计来实现运行中的平衡状态。
2. 利用惯性另一种方法是通过利用惯性,使物体保持平衡。
例如,在自行车行驶时,转弯时将车倾斜,重力向中心移动,而不是向外扩散。
3. 使用飞轮飞轮是一个旋转的轮子,通常用于储存能量并平衡机器或系统中的力。
例如,一辆汽车使用了一个飞轮来平衡和稳定发动机的转速,从而减少振动和噪音。
4. 利用重力重力是平衡力最为常见的来源。
物体的重心对于平衡非常重要。
例如,走在细绳上或是在抛物线上运动,本质上都是在利用重心来保持平衡。
5. 利用阻尼阻尼是指物体内能量的转化,例如摩擦和空气阻力。
这种能量对物体的平衡非常重要。
例如,飞行器在降落时,飞机的发动机通过向尾部喷出空气,以产生前进反作用力,而后起飞时,空气阻力会产生纵向力矩,使其达到动态平衡状态。
综上所述,以上这些方法都是实现动态平衡的有效手段。
在日常生活中,这些方法也被广泛应用于各种机器和工业系统中,为我们的生活带来许多便利。
总结以上介绍的五种方法实现动态平衡的角度各异,但是都具有很大的实用价值和应用前景。
在物理学习中,学生应该善于运用这些方法,以更深入地了解动态平衡的概念和应用。
参考文献1.Halliday, D., Resnick, R., & Walker, J. (2014).Fundamentals of Physics Extended. John Wiley & Sons, Inc.2.Serway, R. A., & Jewett, J. W. (2014). Physics forScientists and Engineers. Cengage Learning.3.Tipler, P. (2012). Physics for Scientists and Engineers:Mechanics, Oscillations and Waves, Thermodynamics. W. H.Freeman.以上学习资源提供了更多的物理学习参考资料和实践案例,供学生们深入理解物理学原理和应用。
专题二十 杠杆动态平衡问题【考点梳理】 (1)杠杆的平衡条件 动力×动力臂=阻力×阻力臂 写成公式F 1l 1=F 2l 2(2)杠杆的动态变化问题杠杆的动态变化情况中,一般阻力大小不发生变化,但会出现动力臂1l 、阻力臂2l 中其中之一发生变化,或者两者同时变化,导致动力的变化。
所以在解题中,先找到支点、作用力及对应的力臂,根据杠杆的平衡条件的变形式2121F l lF ·进行分析,由于阻力2F 保持不变,所示只需要分析阻力臂和动力臂的比值12l l 的(3)杠杆的再平衡杠杆是否平衡取决于力和力臂的乘积是否相等。
①比较末状态时力和力臂的乘积是否相等:若相等则继续平衡;若不相等,哪端乘积大,哪端下沉,另一端上升。
②直接比较两端力和力臂的乘积的减小量或增加量是否相等而判断。
注意:若力臂的关系未知,则可通过杠杆的初始状态的平衡关系来确定。
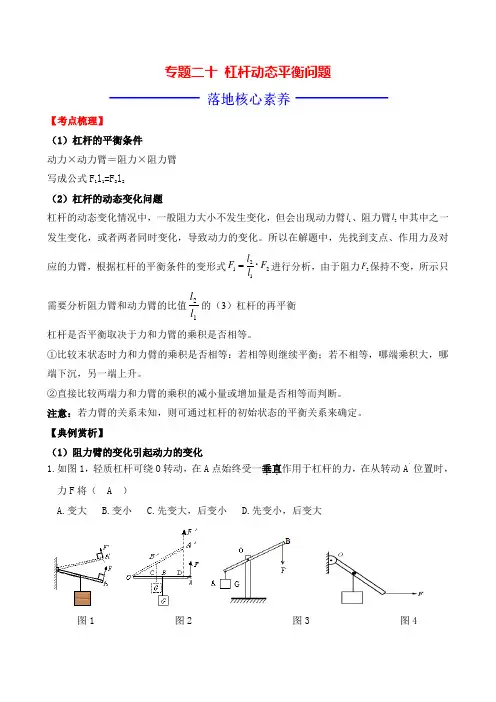
【典例赏析】(1)阻力臂的变化引起动力的变化1.如图1,轻质杠杆可绕O 转动,在A 点始终受一垂直..作用于杠杆的力,在从转动A ’位置时,力F 将( A )A.变大B.变小C.先变大,后变小D.先变小,后变大图1 图2 图3 图4(2)动力臂、阻力臂同时发生变化,但比值不变2.如图2所示,用竖直向上的力F 拉着杠杆OA 的A 端,从水平位置绕着支点O 逆时针匀速转动到虚线所示的位置时,力F 的大小会( C ) A.变大 B.变小 C.不变 D.条件不足,无法判断3.用上图3所示的杠杆提升重物,设作用在A 端的力F 始终竖直向下,在将重物慢慢提升到一定高度的过程中,F 的大小将( A )A.保持不变B.逐渐变小C.逐渐变大D.先变大,后变小4.如图4所示,一个直杠杆可绕轴O 转动,在直杆的中点挂一重物,在杆的另一端施加一个方向始终保持水平的力F ,将直杆从竖直位置慢慢抬起到水平位置过程中,力F 大小的变化情况是( A )A.一直增大B.一直减小C.先增大后减小D.先减小后增大 (3)杠杆偏转问题 ①公式:L F M ·=②问题描述:对于处于平衡状态的杠杆,在其左右两边各加上或减小一个力F ∆,或者是在其左右两边增减一个距离L ∆后,杠杆会向哪边发生偏转呢。
杠杆和滑轮试题、选择题1如图所示,轻质杠杆可绕 O 转动,在A 点始终受一垂直作用 于杠杆的力,在从 A 转动A 位置时,力F 将() A 、变大C 、先变大,后变小D 、先变小,后变大2、 如图所示,轻质杠杆 OA 的B 点挂着一个重物, A 端用细绳吊在圆环 M 下,此时OA 恰成水平且A 点与圆弧形架 PQ 的圆心重合,那么当环 M 从P 点逐渐滑至Q 点的过程中,绳对 A 端的拉力大小将( )A 、保持不变B 、逐渐增大C 、逐渐减小D 、由大变小再变大3、 用右图所示的杠杆提升重物,设作用在A 端的力F 始终竖直向下, 在将重物慢慢提升到一定高度的过程中, F 的大小将( )A 、保持不变B 、逐渐变小C 、逐渐变大D 、先变大,后变小A4、 如图所示,一个直杠杆可绕轴 O 转动,在直杆 的中点挂一重 物,A 、一直增大C 、先增大后减小B 、一直减小D 、先减小后增大5、如图所示,用一细线悬挂一根粗细均匀的轻质细麦桔杆,使其静止在 水平方向上,O 为麦桔杆的中点.这时有两只蚂蚁同时从O 点分别向着麦桔杆的两端匀速爬行,在蚂蚁爬行的过程中麦桔杆在水平方向始终保持乎衡,则(A 、 两蚂蚁的质量一定相等B 、 两蚂蚁的爬行速度大小一定相等C 、 两蚂蚁的质量与爬行速度大小的乘积一定相等D 、 两蚂蚁对麦桔杆的压力一定相等6、如图所示的轻质杠杆, AO 小于BO .在A 、B 两端悬挂重物(同种物质)G i 和G 2后杠杆平衡.若将 G i 和G 2同时浸没到水中则( )A 、杠杆仍保持平衡B 、杠杆的A 端向下倾斜C 、杠杆的B 端向下倾斜D 、无法判断7. 如图是手负重示意图,当手臂按图示方向伸展时,下列图象能在杆的另一端施加一个方向始终保持水平的力 F , 将直杆从竖直位置 表示负重大小与手臂伸 展程度大致关系的B 、变小慢慢抬起到水平位置过程中,力F 大小的变化情况是( 图123G图 A O BABCD8.—架不准确的天平,主要原因是横梁左右两臂不等长。
分析杠杆的三类运动及其特点一、引言杠杆是一种使用简单机械原理来放大力量的工具,广泛应用于日常生活和工业领域。
研究杠杆的物理原理和运动规律对于提高我们的工作效率和生活品质具有重要意义。
本文将介绍杠杆的三类运动,包括平衡运动、非平衡运动和周期运动,并分析它们的特点。
二、平衡运动杠杆的平衡运动是指,它的输入力和输出力在相等的情况下保持静止或匀速运动。
平衡运动的特点是稳定性好,输出力与输入力成比例,因为在平衡状态下输入力和输出力大小相等,方向相反。
例如,人们在使用剪刀时,就是利用平衡杠杆的原理,将输入力转化为输出力来剪切物体。
平衡杠杆也广泛应用于测量身体重量的机器中。
身体重量会作用在一个平衡杠杆上,平衡杠杆之间的距离越短,需要承受的重量越大。
因此,测量身体重量的机器通常采用长杠杆和短杠杆的组合,能够承受更大的重量。
三、非平衡运动杠杆的非平衡运动是指,输入力和输出力不成比例,杠杆的运动速度随时间而变化。
非平衡运动的特点是速度变化较快,输出力与输入力不成比例。
例如,车轮和轴杆的组合,就是利用非平衡杠杆的原理,将来自引擎的能量转化为车轮的旋转速度和推动力。
在车轮和轴杆的组合中,输出力是输入力的垂直分量,而非平衡杠杆的长度是输出力的方向分量。
因此,非平衡杠杆在机械结构中被广泛应用于转动运动和推动运动中。
四、周期运动杠杆的周期运动是指,杠杆在一定周期内完成一次往复运动。
周期运动的特点是可重复性好,运动速度和输出力的变化规律十分规则。
例如,钟表机芯中的凸轮机构就是利用周期杠杆的原理,将机芯的运动转化为时针和分钟表的运动。
在凸轮杠杆机构中,输出力是输入力的垂直分量,并且杠杆的长度和周期都是被设计成恒定的。
因此,凸轮杠杆机构在钟表制造中被广泛应用于时针和分钟表的驱动部分。
五、总结杠杆作为一种简单机械工具,可以根据其运动特点分为平衡运动、非平衡运动和周期运动。
平衡杠杆的特点是输出力与输入力成比例,稳定性好;非平衡杠杆的特点是速度变化快,输出力与输入力不成比例;周期杠杆的特点是可重复性好,运动速度和输出力的变化规律规则。
杠杆动态平衡的几种类型宇文皓月杠杆动态平衡是指构成杠杆的某些要素发生变更,而杠杆仍处于静止状态或匀速转动状态,分析杠杆的动态平衡时,一般是动中取静,根据杠杆平衡条件,分析比较,得出结论。
下面就杠杆动态平衡问题归类分析。
一、阻力一定,判断动力的变更情况1、1l 不变,2l 变更例1、如图1所示,轻质杠杆可绕O 转动,在A 点始终受一垂直作用于杠杆的力,在从A 转动A / 位置时,力F 将( )A 、变大B 、变小C 、先变大,后变小D 、先变小,后变大分析:大,由G l l F 12 ,F 小,所以F 减小。
2、2l 不变,1l 变更例2、如图2所示,轻质杠杆OA 个重物,A 端用细绳吊在圆环M 成水平且A 点与圆弧形架PQ 当环M 从P 点逐渐滑至Q 图1的拉力大小将( )A 、坚持不变B 、逐渐增大C 、逐渐减小D 、由大变小再变大分析:当M 点从P 点滑至Q 点的过程中,我们分两个过程分析,一是从P 点滑至竖直位置,动力臂1l 逐渐增大(同学们无妨作出这两点的动力臂),由G l l F 12=知F 逐渐变小;二是从竖直位置到Q 点,动力臂1l 逐渐减小,所以F 又逐渐增大。
故选D 。
3、1l 与2l 同时变更,但比值不变例3、用右图3所示的杠杆提升重物,设作用在A 端的力F 始终竖直向下,在将重物慢慢提升到一定高度的过程中,F 的大小将( )A 、坚持不变B 、逐渐变小C 、逐渐变大D 、先变大,后变小分析::F 始终竖直向下,与阻力作用线平行,分别作出F 与G 的力臂1l 和2l ,构建两个相似三角形(同学们无妨在图中作出),可以看出,OA OB l l =21为定值,由杠杆平衡条件,21Gl Fl =,得G l l F 12=,所以,F 大小不变。
4、1l 与2l 同时变更 图3 BG例4、如图4所示,一个直杠杆可绕轴O 转动,在直杆的中点挂一重物,在杆的另一端施加一个方向始终坚持水平的力F ,将直杆从竖直位置慢慢抬起到水平位置过程中,力F 大小的变更情况是( )A 、一直增大B 、一直减小C 、先增大后减小D 、先减小后增大分析:将直杆从竖直位置慢慢抬起到水平位置过程中,1l 变小,2l 变大,由G l l F 12 知,F 一直在增大。
杠杆的三种平衡状态
杠杆的三种平衡状态是:稳定平衡、不稳定平衡和中立平衡。
1. 稳定平衡:当杠杆处于稳定平衡状态时,它能够保持在静止位置,即使有轻微的干扰也能够回到原来的平衡位置。
这意味着在稳定平衡状态下,杠杆的重心位于支点下方,因此它具有稳定性。
2. 不稳定平衡:当杠杆处于不稳定平衡状态时,它处于一个非常不稳定的位置,即使有轻微的干扰也会导致杠杆失去平衡。
这种平衡状态下,杠杆的重心位于支点上方,因此它缺乏稳定性。
3. 中立平衡:当杠杆处于中立平衡状态时,它处于一个没有倾向于回到原来平衡位置的状态。
在这种情况下,杠杆的重心正好位于支点上,使得它不受任何外力的干扰。
杠杆动态平衡总结-宝山大华类型一:力的变化问题1、动力F 从D 向G 旋转过程力的变化:分析:杠杆平衡条件221L F FL =可知:因为G F =2且垂直于杠杆,所以22L F 和不变;由于1L 先变大后变小,所以F 先变小后变大。
2、动力F 垂直于杠杆,缓慢向上提升过程力的变化:分析:杠杆平衡条件221L F FL =可知:因为G F =2且F 垂直于杠杆,所以12L F 和不变;由于2L 先变大后变小,所以F 先变大后变小。
3、动力F 沿竖直方向拉动杠杆,力的变化:分析:杠杆平衡条件221L F FL =可知:因为G F =2,所以2F 不变;由于21L L 和均是先变大后变小,同比增减,所以F 不变。
4、动力F 水平向右拉动杠杆,力的变化:分析:杠杆平衡条件221L F FL =可知:因为G F =2,所以2F 不变;由于1L 变小,2L 变大,所以F 一直变大。
(且杠杆不能达到水平位置,假设杠杆到达水平位置,动力臂为0,杠杆不可能平衡)类型二:再平衡问题1、如右图,杠杆开始时平衡:2211L F L F =①若两侧增加相同数量钩码,则右边会下沉;计算分析:2211)()(L F F L F F ++<②若两侧减少相同数量够吗,则左边会下沉。
计算分析:2211)-()-(L F F L F F >极限思想:因为右边原先钩码数量少,左边先减完,右边还剩有钩码。
2、如右图,杠杆开始时平衡:2211L F L F =(B A m m >)①若两小球以相同速度向支点移动,则右边会下沉;计算分析:)-()-(2211L L F L L F <极限思想:大球离支点近,则大球先移动到支点。
②若两小球以相同速度向外侧移动,则左边会下沉;计算分析:)()(2211L L F L L F ++>极限思想:小球离杠杆外端近,则小球先落下杠杆。
3、如右图,杠杆开始时平衡,蜡烛长度关系:C B A L L L 21== 若同时点燃三支蜡烛,则左边会下沉。
杠杆和滑轮试题
一、选择题
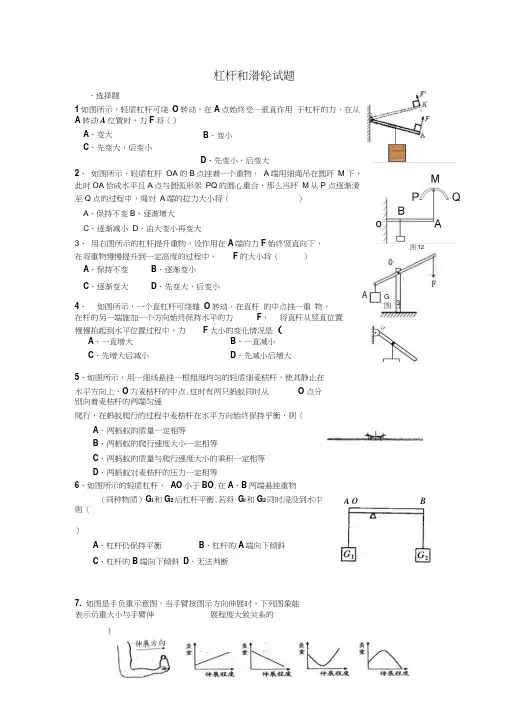
1、如图所示,轻质杠杆可绕O 转动,在A 点始终受一垂直作用 于杠杆的力,在从A 转动A / 位置时,力F 将( ) A 、变大 B 、变小
C 、先变大,后变小
D 、先变小,后变大
2、如图所示,轻质杠杆OA 的B 点挂着一个重物,A 端用细绳吊在圆环M 下,此时OA 恰成水平且A 点与圆弧形架PQ 的圆心重合,那么当环M 从P 点逐渐滑至Q 点的过程中,绳对A 端的拉力大小将( ) A 、保持不变 B 、逐渐增大 C 、逐渐减小 D 、由大变小再变大
3、用右图所示的杠杆提升重物,设作用在A 端的力F 始终竖直向下,在将重物慢慢提升到一定高度的过程中,F 的大小将( ) A 、保持不变 B 、逐渐变小 C 、逐渐变大 D 、先变大,后变小
4、如图所示,一个直杠杆可绕轴O 转动,在直杆的中点挂一重物,
在杆的另一端施加一个方向始终保持水平的力F ,将直杆从竖直位置 慢慢抬起到水平位置过程中,力F 大小的变化情况是( ) A 、一直增大 B 、一直减小 C 、先增大后减小 D 、先减小后增大 。
5、如图所示,用一细线悬挂一根粗细均匀的轻质细麦桔杆,使其静止在
水平方向上,O 为麦桔杆的中点.这时有两只蚂蚁同时从O 点分别向着麦桔杆的两端匀速爬行,在蚂蚁爬行的过程中麦桔杆在水平方向始终保持乎衡,则( )
A 、两蚂蚁的质量一定相等
B 、两蚂蚁的爬行速度大小一定相等
C 、两蚂蚁的质量与爬行速度大小的乘积一定相等
D 、两蚂蚁对麦桔杆的压力一定相等 6、如图所示的轻质杠杆,AO 小于BO .在A 、B 两端悬挂重物
(同种物质)G 1和G 2后杠杆平衡.若将G 1和G 2同时浸没到水中则( ) A 、杠杆仍保持平衡 B 、杠杆的A 端向下倾斜 C 、 杠杆的B 端向下倾斜 D 、无法判断
7.如图是手负重示意图,当手臂按图示方向伸展时,下列图象能表示负重大小与手臂伸展程度大致关系的是
( )
B
o
P
M Q A
图12
图3
B
G
A B C D
8.一架不准确的天平,主要原因是横梁左右两臂不等长。
为了减少实验误差,先把物体放在左盘称得质量为m1,再把物体放在右盘称得质量为m2,该物体的真实质量为( )
9.如图所示的装置中,甲物重5 N,乙物重3 N。
甲、乙均保持静止
状态,不计弹簧测力计自重。
则甲受到的合力和弹簧测力计的示数分
别是
A.0 N,3 N B.0 N,5 N
C.2 N,5 N D.2 N,3 N
10.如图所示,动滑轮重2 N,弹簧秤的示数为10N,则拉力F和物
体的重为
A.20N,18N B.10N,18N
C.18N,10N D.20N,20N
11.如图所示,某同学用重为10N的动滑轮匀速提升重为50N的物
体.不计摩擦,则该同学所用拉力F的可能值是
A.20N B.25N C.30N D.35N
12.如图所示是使用简单机械匀速提升同一物体的四种方式(不计机械自重和摩擦),其中所需动力最小的是
二.填空题
1.一个杠杆的动力臂与阻力臂之比为4∶1,则该杠杆是________杠杆,动力与阻力之比是________.若此杠杆受到的阻力是60 N,则当动力为________ N时,杠杆处于平衡状态。
2.如图是杆秤的示意图.A、B是此杆秤的两个提纽,当分别用两提纽称物体质量时,且秤砣都在杆秤同一位置,则使用________提纽时称量的物体质量要大;如果将提纽B由原来的细绳换成质量较大的细铁丝,那么,使用提纽________称量物体质量时将不准确,且称得的物体的质量将比物体的真实质量________(填“大”“小”).
3.地面上有一根粗细不同的木杆,抬起A端需用力200 N,而抬另一端B端时需用力150 N.则该木杆________端较粗,整个木杆的重量为________ N.
4.如图是人的手臂骨骼与肌肉的生理结构示意图,实质上可将手臂看成一个杠杆.当手中托的物体静止时,重物对手的压力可看成对杠杆阻力,二头肌收缩产生的力可看成对杠杆的__________,肘部O点可看成杠杆的____________,从图中可看出人的手臂实质上是一个________杠杆.
A B
二头肌
桡骨重物
尺骨
O
2题图4题图
5.一人挑担子,扁担AB长1.6米。
在A端挂重物400牛,B端挂重物600牛,则人肩在离A端____米处担子才能平衡。
若使两边重物各减少100牛,人肩应向____端(选填“A”、“B”)移动才有可能保持平衡。
6. 如图,撬棒AB长1.8米,AO长40厘米,重物对棒A端的压力F=700牛,则要撬动重物需要的最小力为__牛,作用的位置应在____,方向_______。
为了更加省力,可将支点O向____端移动。
7.一扁担长1.5 m,前端挑200 N的货,后端挑300 N的货,则肩膀应该离扁担前端________ m处,才能使扁担平衡,平衡后肩受到的压力为________ N.(不计扁担质量)
8.饲养员用铡刀铡草喂动物时,为了铡草时省力,饲养员应把草放在________(填“靠近”“远离”)轴的地方,这样可以使动力臂______阻力臂而达到省力的目的.
9.如图,轻质均匀杠杆AO 长为L,当物体M 从O 逐渐向右移动到达B 点时,绳AC 恰好被拉
断,已知物重1000牛,AB=1
8
L,则悬绳AC 所能承受的拉力是_____牛.
10.筷子是我国古代劳动人民的伟大发明,用筷子
夹菜时,筷子是杠杆,它的动力是______对_____的作用力,一般来说,筷子是动力臂_____阻力臂的杠杆.(填“大于”“小于”或“等于”)
11.如图是汽车陷进泥潭后,司机实行自救的示意图。
自救使用到的滑轮是___ (选填“动滑轮”或“定滑轮”),其作用是_______。
如果车和货物的总质量为5吨,地面的摩擦阻力为重力的0.02倍,则拉力F 大约为____N 。
如果汽车移动的速度为0.05m/s ,则拉力移动的速度为____。
12. 有一个矿井,深20 m ,有两个工人将一个重为400 N 的矿石从井底匀速拉向井面,如图所示,动滑轮重20 N ,不计其他摩
擦.如果两个工人始终保持相同的速度拉矿石,则两
个工人用的拉力F =__________N ;当矿石拉出井面时,则其中一个工人将绳子移动了________ m.
13.某同学研究动滑轮的使用特点,他每次都匀速提起钩码,研究过程如图所示,请仔细观察图中的操作和测量结果,然后归纳得出初步结论。
已知动滑轮的重为0.2牛。
⑴比较(a )、(b )两图可知:___________________;
⑵比较(b )、(c )、(d )三图可知:_____________________。
14.小明同学在“研究定滑轮和动滑轮特点”的实验中,完成了如下图所示的实验并记录了数据。
实验
物重G
使用定滑轮时测力
使用动滑轮时测力
F 1=2.0牛 F 2=1.1牛
F 3=1.3牛
F 4=1.6牛
(a)
(d)
(c) (b)
通过分析数据,她觉得与书中的结论有较大偏差。
你一定也做过这 样的实验,回想你的实验经历,回答下列问题:
⑴该实验中出现这样结果的主要原因是什么? ⑵请你对小雯的实验方法提出合理的改进意见。
15.,如图所示,一段长为l 的均匀木棒,放在水平桌面上,
且使木棒保持平衡,则木棒的重力G=________.
19、用一根细棉线把一段直铁丝吊起来,让铁丝能在水平位置平衡,再将棉线右边的铁丝对折一下,铁丝还能在水平位置平衡吗?实际做做,然后回答:
①你看到的现象是:_____________________________________________________ ________________________________;
②猜想可能的原因是:______________________________________________; ③猜想的依据是:__________________________________________________.
三、计算题
1.有一根1.5 m 长的杠杆,左端挂300 N 的物体,右端挂500 N 的物体,若不计杠杆重力,要使杠杆平衡,支点应在什么位置?如果两端各加100 N 的重物,支点应向哪端移动?移动多少?
次数 /N 计的示数 F 1/N 计的示数F 2/N 1 1.00 0.60 0.65 2 1.50 1.10 0.90 3 2.00
1.60
1.15
16
2、假期里,小兰和爸爸、妈妈一起参加了一个家庭游戏活动。
活动要求是:家庭成员中的任意两名成员分别站在如图所示的木板上,恰好使木板水平平衡。
(1)若小兰和爸爸的体重分别为400N和800N,小兰站在距离中央支点2m的一侧,爸爸应
站在距离支点多远处才能使木板水平平衡?
(2)若小兰和爸爸已经成功地站在了木板上,现在他们同时开始匀速相向行走,小兰的速度是0.5m/s,爸爸的速度是多大才能使木板水平平衡不被破坏?
3.如图所示,两根粗细均匀,横截面积相同但材料不同的金属棒焊接在一起,共长16cm 用第一种金属制成的部分长6cm,如果在两根金属棒焊接处
O点支起它,恰好能保持平衡。
求:
(1)这两根金属棒的质量是否相等?(5分)
(2)两种金属密度之比是多少?(5分)。