分子动力学模拟方法概述(精)
- 格式:doc
- 大小:29.50 KB
- 文档页数:13
分子动力学模拟方法在纳米颗粒反应中的应用概述:纳米颗粒是一种材料尺寸在1-100纳米之间的微小颗粒,具有特殊的物理和化学性质。
纳米颗粒的研究和应用已经成为材料科学和工程领域的热点。
为了深入了解纳米颗粒的性质以及其在催化、储能和传感等领域的应用,分子动力学模拟方法成为一种重要的研究手段。
本文将介绍分子动力学模拟方法在纳米颗粒反应中的应用。
一、分子动力学模拟方法简介分子动力学(Molecular Dynamics,简称MD)模拟是一种计算化学方法,通过数值模拟粒子之间相互作用的运动轨迹,研究物质的宏观性质以及微观运动行为。
它模拟物质在一定时间范围内的动力学行为,通过用牛顿运动定律计算粒子的运动轨迹,并通过引入势能函数来描述粒子的相互作用。
由于其可以在原子或分子尺度上描述系统,MD方法在研究纳米尺度颗粒反应中具有广泛的应用。
二、纳米颗粒反应的MD模拟方法1. 动力学模拟的体系建立在MD模拟中,首先需要建立包含纳米颗粒的反应体系。
通过将纳米颗粒置于模拟盒中,并添加适合的溶剂和其他反应物,来模拟实际反应环境。
对于纳米颗粒来说,需要确定其原子组成和结构,确定溶剂的类型和浓度,确定其他反应物的浓度和反应条件等。
通过合理设计模拟体系,可以模拟出真实反应体系的动态行为。
2. 势能函数的选择在MD模拟中,势能函数用于描述粒子之间的相互作用力,其中包括键长势、键角势、二面角势和非键相互作用势等。
对于纳米颗粒的反应系统,需要选择适合的势能函数,以准确地描述颗粒的化学反应过程。
一般而言,常用的势能函数有Lennard-Jones 势能、Coulomb势能、Buckingham势能等。
选择合适的势能函数可以准确地模拟反应体系的能量变化。
3. 模拟算法MD模拟中,需要对系统内粒子的运动轨迹进行数值计算,并根据粒子之间的相互作用力来更新粒子的位置和速度。
一般常用的模拟算法有Verlet算法、Leapfrog算法和Euler算法等。
分子动力学模拟分析分子动力学模拟(Molecular Dynamics Simulation,简称MD)是一种计算模拟分子运动的方法,可以研究分子的结构、动力学和相互作用等,对物质性质和功能的研究有重要作用。
在材料科学、化学、生物学等领域中得到广泛应用。
本文将从MD模拟基础、模拟流程及分析研究结果三个方面进行阐述。
一、MD模拟基础MD模拟的基础是牛顿力学和统计物理学,其中牛顿三定律和万有引力定律描述了分子的运动和相互作用;玻尔兹曼分布定律、统计力学中的最大熵原理以及热力学第二定律等描述了系统的宏观性质和热力学性质。
MD模拟将牛顿力学和统计物理学相结合,通过数值计算方法,从初状态的分子坐标、速度和势能等信息出发,重复计算分子在某个温度、压力下的运动轨迹和性质,模拟时间可以从纳秒到毫秒,有关联的分子之间,模拟精度可达到亚埃。
二、模拟流程MD模拟的主要流程包括体系构建、体系平衡和体系生产等阶段。
体系构建需要先定义体系的边界、所包含分子种类及其数量、分子初始坐标等,这一阶段可以是手动构建,也可以是从实验数据中获取分子坐标信息进行加工。
体系平衡一般需要先进行一个大规模的能量最小化,在此基础上,对体系进行一个温度和压力逐步升高或下降的过程,使体系逐步达到平衡态,也可以调整体系的偏倚参数,如盒子尺寸等,最终得到较为合理的平衡态体系。
在体系平衡的基础上,进行体系生产,对于所需要的性质,如动力学参数、能量铁达方程、径向分布函数、自相关函数等,在进行生产时需要对体系进行约束,如固定温度、压力、含水量等,得到精确的分子性质描述。
三、分析研究结果对MD模拟结果的分析对研究者而言极为重要,主要是对数据的可视化及其统计分析。
一般可以采用分析软件如VMD、GROMACS等对MD的轨迹文件进行可视化,对于分子的运动、某些物理性质的演化、分子图像变化等,可以做出一系列的动画或动图。
对于性质的统计分析,一般需要进行采样过程,对一定时刻内的数值进行平均,这样可减小误差。
分子动力学模拟方法的基本原理与应用分子动力学模拟(Molecular Dynamics Simulation, MD)是一种计算方法,用于模拟和研究分子系统的动力学行为。
它基于牛顿运动定律和分子间相互作用力,通过离散化连续系统,以微分方程的形式求解粒子的运动轨迹。
分子动力学模拟方法广泛应用于材料科学、物理化学、生物医学等领域的研究中。
1.定义系统:选择模拟的分子系统,包括分子种类、数量和初始位置和速度。
2.建立模型:为分子系统建立力场模型,即定义分子之间的相互作用势能函数,通常采用分子力场(常用的如经典力场、量子力场等)。
3. 运动方程的求解:根据牛顿运动定律,通过求解粒子的运动方程来模拟系统的动力学行为。
常见的求解算法有Verlet算法、Euler算法和Leapfrog算法等。
4.进行模拟:通过迭代求解的方式,模拟系统在给定条件下的运动行为,确定粒子的轨迹和能量变化。
5.分析结果:根据模拟得到的数据,进行数据分析和结果解释。
可以计算系统的物理性质(如能量、温度等)以及分子间的相互作用行为和动力学过程。
1.材料科学:用于研究材料的结构、热力学性质和动力学行为,设计新材料和改进材料性能。
例如,通过模拟纳米材料的力学性质和变形行为来指导纳米器件的设计和材料加工过程。
2.物理化学:用于研究化学反应的机理、反应动力学和能量转化过程。
例如,通过模拟催化剂表面上的分子运动,揭示催化反应的反应途径和选择性。
3.生物医学:用于研究生物大分子(如蛋白质、核酸等)的结构和功能,模拟蛋白质的折叠过程,分析蛋白质-配体的相互作用。
这可以为药物设计和疾病治疗提供理论指导。
4.环境科学:用于模拟地球上的大气、水体和土壤中的分子运动,研究大气污染和环境污染物的扩散、迁移和转化过程。
5.能源和储存:用于模拟电池材料、太阳能材料等,帮助优化能源转化和储存过程,提高能量利用效率。
总之,分子动力学模拟是一种重要的计算方法,通过模拟分子系统的动力学行为,可以深入了解和预测各种物质的性质和相互作用行为,为实验研究提供理论指导和解释。
分子动力学模拟实验的原理与方法一、引言分子动力学模拟实验是一种基于分子运动规律的计算方法,通过模拟分子间相互作用力和运动轨迹,可以研究物质的结构、性质和动力学过程。
本文将介绍分子动力学模拟实验的原理与方法,包括模拟算法、模拟体系的构建和模拟结果的分析。
二、分子动力学模拟的原理分子动力学模拟实验基于牛顿力学和统计力学的原理,通过求解分子系统的运动方程,模拟分子间相互作用力和运动轨迹。
其基本原理可以概括为以下几点:1. 分子运动方程分子动力学模拟实验中,每个分子都被看作是一个质点,其运动方程可以由牛顿第二定律得到。
根据分子的质量、受力和加速度,可以得到分子的位置和速度随时间的变化。
2. 分子间相互作用力分子间的相互作用力可以通过势能函数来描述,常见的势能函数包括Lennard-Jones势和Coulomb势。
这些势能函数描述了分子间的吸引力和排斥力,从而影响分子的相互作用和运动。
3. 温度和压力控制分子动力学模拟实验中,为了模拟实际系统的温度和压力条件,需要引入温度和压力控制算法。
常见的温度控制算法包括Berendsen热浴算法和Nosé-Hoover热浴算法,压力控制算法包括Berendsen压力控制算法和Parrinello-Rahman压力控制算法。
三、分子动力学模拟的方法分子动力学模拟实验的方法包括模拟算法、模拟体系的构建和模拟结果的分析。
下面将对这些方法进行介绍。
1. 模拟算法分子动力学模拟实验中,常用的模拟算法包括经典力场方法和量子力场方法。
经典力场方法基于经验势能函数,适用于大尺度的分子系统,如蛋白质和溶液。
量子力场方法基于量子力学原理,适用于小尺度的分子系统,如分子反应和电子结构计算。
2. 模拟体系的构建模拟体系的构建是分子动力学模拟实验中的重要步骤,包括选择模拟系统、确定初始结构和参数设置。
模拟系统的选择应根据研究的目的和问题,可以是单个分子、溶液系统或固体表面。
初始结构可以通过实验数据、计算方法或模型生成,参数设置包括力场参数、温度和压力等。
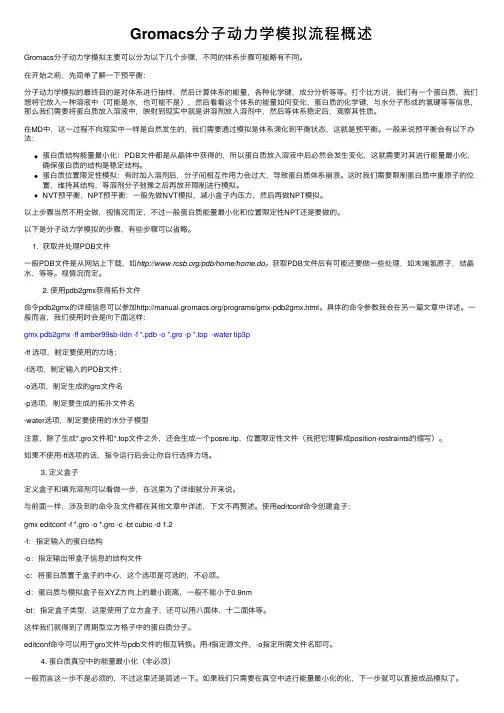
Gromacs分⼦动⼒学模拟流程概述Gromacs分⼦动⼒学模拟主要可以分为以下⼏个步骤,不同的体系步骤可能略有不同。
在开始之前,先简单了解⼀下预平衡:分⼦动⼒学模拟的最终⽬的是对体系进⾏抽样,然后计算体系的能量,各种化学键,成分分析等等。
打个⽐⽅说,我们有⼀个蛋⽩质,我们想将它放⼊⼀种溶液中(可能是⽔,也可能不是),然后看看这个体系的能量如何变化,蛋⽩质的化学键,与⽔分⼦形成的氢键等等信息,那么我们需要将蛋⽩质放⼊溶液中,映射到现实中就是讲溶剂放⼊溶剂中,然后等体系稳定后,观察其性质。
在MD中,这⼀过程不向现实中⼀样是⾃然发⽣的,我们需要通过模拟是体系演化到平衡状态,这就是预平衡。
⼀般来说预平衡会有以下办法:蛋⽩质结构能量最⼩化:PDB⽂件都是从晶体中获得的,所以蛋⽩质放⼊溶液中后必然会发⽣变化,这就需要对其进⾏能量最⼩化,确保蛋⽩质的结构是稳定结构。
蛋⽩质位置限定性模拟:有时加⼊溶剂后,分⼦间相互作⽤⼒会过⼤,导致蛋⽩质体系崩溃。
这时我们需要限制蛋⽩质中重原⼦的位置,维持其结构,等溶剂分⼦弛豫之后再放开限制进⾏模拟。
NVT预平衡,NPT预平衡:⼀般先做NVT模拟,减⼩盒⼦内压⼒,然后再做NPT模拟。
以上步骤当然不⽤全做,视情况⽽定,不过⼀般蛋⽩质能量最⼩化和位置限定性NPT还是要做的。
以下是分⼦动⼒学模拟的步骤,有些步骤可以省略。
1. 获取并处理PDB⽂件⼀般PDB⽂件是从⽹站上下载,如/pdb/home/home.do。
获取PDB⽂件后有可能还要做⼀些处理,如末端氢原⼦,结晶⽔,等等。
视情况⽽定。
2. 使⽤pdb2gmx获得拓扑⽂件命令pdb2gmx的详细信息可以参加/programs/gmx-pdb2gmx.html。
具体的命令参数我会在另⼀篇⽂章中详述。
⼀般⽽⾔,我们使⽤时会是向下⾯这样:gmx pdb2gmx -ff amber99sb-ildn -f *.pdb -o *.gro -p *.top -water tip3p-ff 选项,制定要使⽤的⼒场;-f选项,制定输⼊的PDB⽂件;-o选项,制定⽣成的gro⽂件名-p选项,制定要⽣成的拓扑⽂件名-water选项,制定要使⽤的⽔分⼦模型注意,除了⽣成*.gro⽂件和*.top⽂件之外,还会⽣成⼀个posre.itp,位置限定性⽂件(我把它理解成position-restraints的缩写)。
Gromacs分子动力学模拟方法1. 引言Gromacs(Groningen Machine for Chemical Simulations)是一种常用的分子动力学模拟软件,广泛应用于生物物理、化学和材料科学领域。
分子动力学模拟是一种计算实验方法,通过模拟分子的运动来研究物质的性质和行为。
本文将介绍Gromacs分子动力学模拟方法的基本原理、应用场景以及实现步骤。
2. 基本原理Gromacs分子动力学模拟方法基于牛顿第二定律和经典力场原理,通过数值积分求解分子的运动方程。
它将分子系统看作一组粒子(原子或分子),根据粒子之间的相互作用力,计算粒子的加速度和速度,从而推导出粒子在下一个时间步长的位置。
这个过程通过以下几个步骤实现:2.1 力场参数化力场是描述分子相互作用的数学模型,包括键长、键角、二面角等参数。
在Gromacs中,常用的力场有GROMOS、AMBER和CHARMM等。
在进行分子动力学模拟之前,需要根据所研究的分子的化学结构和性质,选择合适的力场,并通过参数化过程确定力场的参数。
2.2 初始构型生成在进行分子动力学模拟之前,需要生成分子的初始构型。
常见的方法包括从实验数据或计算结果中获取分子的结构信息,或者通过分子建模软件生成分子的三维结构。
Gromacs支持多种文件格式,如PDB和GRO,用于存储分子的结构信息。
2.3 系统能量最小化在模拟开始之前,需要对系统进行能量最小化,以消除构型中的不合理接触或过度重叠。
Gromacs提供了多种能量最小化算法,如共轭梯度法和牛顿法。
在能量最小化过程中,系统中的粒子会根据力场的作用力逐渐移动,直到达到一个局部能量最小值。
2.4 模拟参数设置在进行分子动力学模拟之前,需要设置模拟的时间步长、模拟时间和模拟温度等参数。
时间步长决定了模拟的时间分辨率,一般选择在飞秒量级;模拟时间决定了模拟的总时长,需要根据研究目的和计算资源来确定;模拟温度可以通过控制系统与外界的热交换来模拟不同温度下的系统行为。
从头算分子动力学模拟方法介绍
分子动力学模拟(Molecular Dynamics,MD)是凝聚态物理学和
化学其中一个主要的理论领域,它也是一种统计机器的计算模型,旨
在模拟单个分子或大型分子系统的时间发展,包括热力学,凝聚相变
和其他行为。
它是计算机模拟的基础,可用于几乎所有的模拟,包括
量子化学模拟和量子有效力场模拟。
MD模拟中的分子可以很容易地构建,使用就可以在静止温度状态下执行,也可以在非平衡条件下运行,以模拟复杂的过程。
根据分子的属性,分子动力学空间中的分子可以根据库仑力及其衍生力(如电荷引力)之间的作用来定义。
这些力会作用于分子,使其处于动力学状态。
在一个MD模拟中,首先需要一个准备步骤,在它里面,将为需要模
拟的分子系统选择一个合适的体系构建方法。
其次,在模拟之前,需
要分析出分子的势能函数,以及势能函数前的参数(例如电荷)。
当
这些第一步准备完成之后,就可以开始加热系统,利用温度学进行模拟。
在这一步,需要使用一个正确的动力学实现,比如微扰动方法或Langevin方法,它们能够合理准确地描述理想气体模型中分子是如何
相互作用、碰撞和燃烧的。
最后,可以开始模拟系统,并观察各种不
同的物理规律,比如结构的变化或者常数关系。
完成MD模拟后,就
可以获得温度和其他量的时间变化,以及空间结构的变化。
分子动力学模拟概述
分子动力学模拟是一种计算机模拟方法,用于分析原子和分子的物理运动。
以下是分子动力学模拟的概述:
基本原理:
分子动力学模拟基于牛顿运动定律,模拟分子体系的运动,在由分子体系的不同状态构成的系统中抽取样本,从而计算体系的构型积分,并以构型积分的结果为基础进一步计算体系的热力学量和其他宏观性质。
模拟过程:
分子动力学模拟首先需要建立所模拟体系的模型,包括体系内粒子的结构特性及其粒子间的相互作用。
接着,赋予体系内各粒子初始位置和初始速度,使其满足一定的统计规律,然后解体系的牛顿运动方程直至体系达到平衡。
最后,对平衡后的体系进行宏观物理量的统计平均,得到所需要的模拟结果。
应用领域:
分子动力学模拟广泛应用于物理、化学、生物和材料科学等领域。
例如,在材料科学中,分子动力学模拟可用于研究材料的力学性质、热学性质、电学性质等;在生物学中,分子动力学模拟可用于研究生物大分子的结构和功能,以及药物与生物大分子的相互作用等。
优缺点:
分子动力学模拟的优点在于能够模拟体系的动态过程,揭示体系的微观机制,并可用于预测体系的宏观性质。
然而,分子动力学模拟也存在一些缺点,例如模拟结果受到模拟时间、模拟体系大小和力场参数等因素的影响,可能存在误差和不确定性。
总的来说,分子动力学模拟是一种强大的计算工具,可用于研究复杂体系的物理和化学过程,为理解和预测材料的性质和行为提供重要手段。
引言概述:分子动力学模拟(MD)是一种模拟系统内原子或分子运动的计算方法,通过计算原子之间的相互作用力和运动方程,可以研究材料的物理和化学性质、相互作用和动态行为等。
本文将深入探讨分子动力学模拟的相关内容,包括模拟算法、分子模型构建、初始条件设定、系统参数调优、结果分析等。
正文内容:一、模拟算法1.1简单分子动力学模拟算法:介绍经典分子动力学模拟的基本原理和算法。
1.2高级模拟算法:介绍一些基于统计力学和量子力学原理的高级分子动力学模拟算法,如MonteCarlo方法和量子分子动力学模拟。
二、分子模型构建2.1原子选择:根据研究对象和目的,选择适合的原子种类。
2.2原子间相互作用模型:介绍常用的原子间相互作用势函数模型,如LennardJones势和Coulomb势等。
2.3拓扑构建:说明如何根据分子结构构建拓扑,包括原子连接方式和键长、键角、二面角等参数。
三、初始条件设定3.1初始构型:介绍如何原子或分子的初始位置和速度。
3.2温度控制:讨论如何在模拟中控制温度,包括使用温度计算公式和应用恒温算法等。
3.3压力控制:介绍如何在模拟中控制压力,包括应用压力计算公式和应用恒压算法等。
四、系统参数调优4.1时间步长选择:讲解如何选择合适的时间步长,以确保模拟结果的准确性和稳定性。
4.2模拟时间长度:介绍如何选取适当的模拟时间长度,以获得足够的统计样本。
4.3系统尺寸选择:探讨系统尺寸对模拟结果的影响,包括边界条件的选择和静电相互作用的处理。
五、结果分析5.1动力学参数计算:介绍如何通过模拟数据计算动力学参数,包括径向分布函数和速度自相关函数等。
5.2结构参数分析:讨论如何分析模拟结果中的结构特征,如配位数、键长分布和角度分布等。
5.3物理性质计算:讲解如何通过模拟数据计算材料的物理性质,如热力学性质和动力学性质等。
总结:分子动力学模拟是一种强大的计算工具,可以模拟和研究材料的动态行为和性质。
从模拟算法、分子模型构建、初始条件设定、系统参数调优到结果分析,每个步骤都需要仔细考虑和调整,以保证模拟结果的准确性和可靠性。
分子动力学模拟方法介绍分子动力学模拟是一种重要的计算方法,用于研究分子系统的动态行为。
它通过模拟原子和分子之间的相互作用力,以及它们在空间中的运动,从而得出分子系统的各种性质和行为。
在材料科学、生物化学、物理学等领域,分子动力学模拟被广泛应用于研究各种复杂的分子系统和反应机制。
分子动力学模拟的基本原理是牛顿第二定律,即F=ma,其中F是物体所受到的力,m是物体的质量,a是物体的加速度。
在分子动力学模拟中,每个原子都被视为一个刚性球体,其质量和运动受到分子之间的相互作用力的影响。
通过数值积分的方法,可以计算出每个原子在每个时间步长内的位置和速度。
分子动力学模拟的核心是通过相互作用势能来描述分子之间的相互作用。
常见的相互作用势能包括分子内键能、范德华力、库伦力和非键共价力等。
这些相互作用势能可以通过实验测量或理论计算得到,并通过数学函数的形式来表示。
在模拟过程中,根据相互作用势能的大小和方向,可以计算出每个原子所受到的力,从而确定其运动轨迹。
分子动力学模拟可以用于研究分子系统的各种性质和行为。
例如,通过模拟液体分子的运动,可以得到粘度、扩散系数等动态性质;通过模拟晶体的结构和热力学性质,可以预测其物理特性;通过模拟生物大分子的折叠过程,可以了解其三维结构和功能等。
此外,分子动力学模拟还可以研究分子反应的速率和机制,从而为化学合成和药物设计提供指导。
在进行分子动力学模拟时,需要考虑多种因素。
首先,需要选择合适的相互作用势能函数,以准确描述分子之间的相互作用。
其次,需要确定模拟系统的边界条件和约束条件,以模拟实验环境中的真实情况。
另外,还需要选择合适的时间步长和模拟时间,以确保模拟结果的准确性和可靠性。
分子动力学模拟方法有多种不同的实现方式。
其中最常见的是基于经典力场的模拟方法,在模拟过程中忽略量子效应,并采用经验参数来描述相互作用。
此外,还有基于量子力场的模拟方法,考虑了量子效应,并使用量子力学理论来描述分子之间的相互作用。
分子动力学模拟的原理及其应用随着计算机技术的高速发展,分子动力学模拟(Molecular Dynamics Simulation,MD)已经成为了一种重要的理论与计算方法,在化学、物理、材料、生物等领域得到了广泛的应用。
其主要基于牛顿第二定律,通过数值计算来模拟分子的运动,从而揭示分子间的相互作用、热力学性质等信息。
一、分子动力学模拟的基本原理分子动力学模拟是一种建立在分子间相互作用的基础上,通过解牛顿方程的计算方法,模拟分子的运动行为的一种理论与计算方法。
(一)牛顿第二定律牛顿第二定律描述了物体所受合外力作用时的加速度和质量之间的关系。
对于一个质量为m的物体,它的加速度a和作用力F 之间的关系为:F=ma。
(二)化学键势能对于一个化学体系,其所具有的能量主要由势能、动能以及相互作用能组成。
其中,化学键势能是用来反映原子间距离、化学键的力常数等因素的有效能量。
(三)Newton运动方程Newton运动方程描述了物体在给定的力学场中的运动状态,即物体在时间t内的速度、位移和加速度的关系。
对于一个单分子的系统来说,其牛顿运动方程可以被表示为:F=ma其中,F为作用于原子i的外力,m为原子i的质量,a为原子i 的加速度。
(四)Verlet算法提出了用于原子振动的时间推进算法,被称为Verlet算法。
在这种算法中,通过使用当前时间步长、前一个时间步长和后一个时间步长的位置(在时间段内)来估计当前时间步长的速度。
在迭代计算中,原子的加速度取决于位置和能量的二阶导数。
二、分子动力学模拟的应用领域分子动力学模拟已经广泛应用于化学、物理、材料、生命科学与生物技术等领域,其中包括:(一)材料科学MD可以被用来模拟材料中的原子运动行为,这些材料可以包括分子、聚合物、合金、晶体、液晶等。
(二)生命科学MD可以用来研究生物大分子,如蛋白质结构和功能,核酸的结构和动力学,以及膜蛋白等的结构和功能。
其还可以用于药物的发现与设计。
分子动力学模拟方法及应用概述分子动力学模拟是一种基于牛顿力学原理和统计力学的计算模拟方法,可用于研究物质的微观结构和动力学行为。
本文将介绍分子动力学模拟的基本原理和常用的计算方法,以及它在不同领域的应用。
一、分子动力学模拟的基本原理分子动力学模拟基于经典力学理论,通过求解牛顿运动方程来模拟物质的运动行为。
它假设系统中的分子为硬球或软球,根据分子之间的相互作用力、动能和位能,计算分子的运动轨迹和力学性质。
1. 分子间相互作用力分子间的相互作用力主要包括范德华力、静电力和键能。
范德华力描述非极性分子之间的相互作用力,静电力描述电荷之间的相互作用力,而键能则表示化学键的形成和断裂过程。
这些相互作用力的计算对于准确模拟分子的行为至关重要。
2. 动力学方程分子动力学模拟基于牛顿第二定律,即F=ma。
其中,F 是分子所受的合外力,m是分子的质量,a是加速度。
通过求解这些动力学方程,可以得到分子的位置和速度随时间的演化。
二、常用的分子动力学模拟方法在分子动力学模拟中,为了准确模拟系统行为,需要借助适当的计算方法和技术。
以下是几种常用的分子动力学模拟方法。
1. Verlet算法Verlet算法是最常用的求解分子动力学方程的方法之一。
它基于泰勒级数展开,通过利用前一时刻的位置和加速度来预测当前时刻的位置。
Verlet算法具有较高的计算精度和稳定性。
2. Monte Carlo模拟除了分子动力学模拟,Monte Carlo模拟也是一种常用的计算方法。
它基于随机抽样的方法,通过模拟系统的状态转移来研究系统的平衡性质和统计性质。
Monte Carlo模拟在研究液体和固体的相变、化学反应等方面具有重要的应用。
3. 并行计算由于分子动力学模拟的计算复杂性很高,为了提高计算效率,通常需要借助并行计算技术。
并行计算可以将任务分配给多个处理器或计算节点进行并行计算,大大提高了计算速度和效率。
三、分子动力学模拟的应用领域分子动力学模拟在化学、材料科学、生物物理学等领域具有广泛的应用。
分子动力学模拟的原理和方法分子动力学模拟(Molecular Dynamics Simulation, 简称MD)是一种将牛顿力学应用到分子层面的模拟技术,可以模拟原子和分子之间的相互作用、热力学性质、结构和动力学行为等。
MD模拟可以帮助化学、物理、生物和材料科学等领域深入了解宏观现象的微观机制,如蛋白质折叠、物质传输、材料制备等,被广泛应用于科学研究和技术开发之中。
本文将简要介绍MD模拟的原理和方法。
一、MD模拟的基本原理MD模拟从每个原子的初始位置和速度开始,通过求解牛顿方程(F=ma)来模拟系统在时间上的演化。
在MD模拟中,系统通过使用多体势能函数对原子间的相互作用进行建模,而势能函数通常由经验势和量子化学手段得到。
在物理意义上,势能函数体现了系统的稳定性、结构性质和动力学行为。
通过构建适当的势能函数,MD模拟可以模拟系统在不同温度、压力和配位数等条件下的热力学性质。
MD模拟中的牛顿运动方程可以写成如下形式:m_i d^2r_i /dt^2 = -∇_i U,其中m_i是第i个原子的质量,r_i是它的坐标,U是总势能。
这里d^2 /dt^2表示双重时间导数,即加速度。
∇_i表示关于i号原子的拉普拉斯算子。
通过牛顿方程,我们可以获得系统中每个原子的位置和速度,并通过使用数值积分方法对它们进行离散化计算。
MD模拟的基本步骤包括:1. 构建系统模型:包括化学结构、粒子数、初始位置、速度等2. 选择适当的势能函数:包括经验势和量子化学势等,并进行参数化3. 进行初始的能量最小化:通过改变原子位置和速度,使系统达到稳定状态4. 进行温度和压力的控制:可以通过Berendsen热浴、Nose-Hoover热浴、Andersen热浴等方法对系统进行控制5. 进行时间演化:通过数值积分方法对牛顿方程进行求解,计算原子的位置和速度6. 计算系统的热力学属性:包括温度、压力、能量、速度和位移等。
二、MD模拟的方法MD模拟方法主要可以分为两类,即粒子动力学模拟(Particle Dynamics Simulation, PDS)和基于能量的最小化算法(Energy Minimization Algorithm, EMA)。
1 分子动力模拟计算的基本原理分子动力计算的基本原理,即为利用牛顿运动定律。
在分省储存空间。
其缺点是位置与速度不同步。
这意味着在位置一子动力模拟中,体系原子的一系列位移是通过对牛顿运动方程定时,不可能同时计算动能对总动能的贡献。
的积分得到的,结果是一条运动轨迹,它表明了系统内原子的位置与速度是如何随时间而发生变化。
先由系统中各分子位置计算系统的势能,按照经典力学,系统中任一原子i 所受的力为势能的梯度:将牛顿运动定律方程式对时间积分,可预测i 原子经过时间t 后的速度与位置:式中, 及 分别是粒子i 的位置与速度,上标“0”为各物理量的初始值[1]。
2 牛顿运动方程的数值解法为了得到原子的运动轨迹,必须解式(3)的牛顿运动方程,可采用有限差分法。
有限差分法的基本思想就是将积分分成很多小步,每一小步的时间固定为 。
常用的有以下几种算法:①Verlet 算法;② Velocity-Verlet 算法;③ leap-frog 算法(蛙跳算法);④ Beeman 算法;⑤ Gear 算法。
leap-frog 算法和Gear 算法由于使用简便,准确性及稳定性高,节省储存空间等作者:photon 优点,已被广泛采用。
2.1 leap-frog算法Leap-frog 算法速度与位置的数学式为:为了执行leap-frog 算法,必须首先由t-0.5 时刻的速度与t 时刻的加速度计算出 ,然后由方程计算出位置 。
时间为t 时的速度可由式(6)算 2.2 Gear算法[1]Gear 所提出的一种利用数值解的方法,称为校正预测法(predictor-corrector method )。
时间t+ 时的位置、速度等可由时间t 的泰勒展开式预测得到:式中的 的1次、2次、3次微分。
式(7)所产生的速度、加速度不是由牛顿运动方程解得的,所以并非完全正确。
可由所预测的位置 计算所受的力及正确的加速度 。
设正确的加速度与预测的加速度之间的误差为:式中, 均为常数。
第六章 分子动力学模拟 Molecular Dynamics –MD 6.1引言分子动力学模拟方法是在牛顿力学的理论框架下,根据体系内分子之间的相互作用势,获得每个原子随时间运动的轨迹,通过系综平均,可以得到感兴趣的与结构和动力学性质有关的物理量,如:平均原子坐标,平均能量、平均温度及原子运动的自相关函数等。
这些物理量是通过对每个原子的运动轨迹,即微观量求平均而得到的宏观量,因此可以与实验观测量进行比较。
用计算机模拟方法在向空间采样方法有两种: (1) 随机采样 MC (2) 确定性方法MD以上讲过的MC (Monte Carlo )采样方法就是随机方法,与随机方法不同,确定性方法是按照动力学规律使系统在相空间运动。
分子动力学模型就是一种确定性方法。
它的基本出发点是从一个完全确定的物理模型出发,通过解牛顿运动方程而得到原子运动的轨迹。
我们感兴趣的可测量的客观物理量可以通过相空间的采样求系综平均而得到。
在多态历经假设成立的情况下,系综平均与长时间平均是相同的。
⎰∞→∞==τττ01))(),((limdt t p t q A A A系综其中q,p 为t 的函数。
A 表示系综平均,∞A 表示无穷长时间平均。
因模拟时间总是有限的。
对耦分子体系,当模拟时间大于分子的弛豫时间时,有限观测时间可以变成为无穷长的。
当弛豫模拟〉τt ,模拟t 可认为∞,因物理上的∞是不可能的。
6.2基本原理 1.动力学方程基本动力学方程包括在经典力学(CM )框架下的牛顿方程和在量子动力学(QM )框架下的薛定谔方程。
在常温下,经典的牛顿方程对研究生物分子体系的结构和动力学性质已经足够了,因为这时体系的量子效应并不十分重要。
但是,对研究包含隧道效应的反应时间问题时,量子效应十分明显,这时就必须用QM 方程来模拟体系的量子动力学性质。
QM:含时薛定谔方程为),(),(t r i t r H t→∂∂→∧-=ψψ (2.1)其中∧H 为哈密顿算符,),(t r →ψ为波函数,→r 表示一系列原子坐标,即),,(21→→→→=N r r r r 。
分子动力学仿真简介分子动力学(Molecular Dynamics,简称MD)是一种通过计算机模拟分子粒子的运动,以研究物质的性质和行为的方法。
它基于牛顿力学的运动方程,通过数值积分来模拟分子的运动和相互作用,从而得到物质在原子尺度上的行为。
分子动力学仿真是基于分子动力学原理,使用计算机进行的模拟实验。
通过对原子或分子之间的运动进行建模和计算,可以研究物质的结构、动力学过程和热力学性质等。
分子动力学原理分子动力学原理基于牛顿力学,通过牛顿第二定律推导出分子的运动方程。
运动方程的求解是通过数值积分的方法进行的。
在分子动力学模拟中,计算机程序会根据给定的初始状态和相互作用势函数,在微观上模拟出分子粒子的运动和相互作用,从而模拟宏观物质的行为。
分子动力学模拟中最重要的步骤是更新每个粒子的位置和速度。
这一步骤需要计算每个粒子受到的力,并根据牛顿第二定律计算其加速度、速度和位置的变化。
通常,粒子之间的相互作用势函数会根据分子的类型和模拟的系统进行选择。
常见的相互作用势函数包括Lenanrd-Jones势和Coulomb势等。
分子动力学仿真的步骤分子动力学仿真通常包括以下几个步骤:1.系统的初始化:设定初始状态,包括粒子的初始位置和速度等。
通常,初始位置可以通过从实验数据或数学模型中获得的结构来得到,而速度可以通过从温度分布或速度分布得到的随机数生成。
2.动力学计算:根据牛顿运动方程,计算每个粒子受到的力,并通过数值积分方法更新粒子的位置和速度。
通常,采用的数值积分方法包括Euler法、Verlet法和Leapfrog法等。
3.相互作用势的计算:根据设定的相互作用势函数,计算每个粒子之间的相互作用能。
常见的相互作用势函数包括Lenanrd-Jones势和Coulomb势等。
4.热力学性质的计算:通过对系统的动力学计算,可以获得系统的热力学性质,如温度、压力和能量等。
这些性质可以通过统计平均的方法进行计算,例如计算平均速度、平均动能和平均势能等。
《装备制造技术》 2007年第 10期收稿日期 :2007-08-21作者简介 :申海兰 , 24岁 , 女 , 河北人 , 在读研究生 , 研究方向为微机电系统。
分子动力学模拟方法概述申海兰 , 赵靖松(西安电子科技大学机电工程学院 , 陕西西安 710071摘要 :介绍了分子动力学模拟的基本原理及常用的原子间相互作用势 , 如Lennard-Jones 势 ; 论述了几种常用的有限差分算法 , 如 Verlet 算法 ; 说明了分子动力学模拟的几种系综及感兴趣的宏观统计量的提取。
关键词 :分子动力学模拟 ; 原子间相互作用势 ; 有限差分算法 ; 系综中图分类号 :O3文献标识码 :A文章编号 :1672-545X(200710-0029-02从统计物理学中衍生出来的分子动力学模拟方法 (molec-ular dynamics simulation , M DS , 实践证明是一种描述纳米科技研究对象的有效方法 , 得到越来越广泛的重视。
所谓分子动力学模拟 , 是指对于原子核和电子所构成的多体系统 , 用计算机模拟原子核的运动过程 , 从而计算系统的结构和性质 , 其中每一个原子核被视为在全部其他原子核和电子所提供的经验势场作用下按牛顿定律运动 [1]。
它被认为是本世纪以来除理论分析和实验观察之外的第三种科学研究手段 , 称之为“计算机实验” 手段 [2], 在物理学、化学、生物学和材料科学等许多领域中得到广泛地应用。
根据模拟对象的不同 , 将它分为平衡态分子动力学模拟 (EM DS (和非平衡态分子动力学模拟 (NEM DS 。
其中 , EM DS 是分子动力学模拟的基础 ; NEM DS 适用于非线性响应系统的模拟 [3]。
下面主要介绍 EM DS 。
1分子动力学方法的基本原理计算中根据以下基本假设 [4]:(1 所有粒子的运动都遵循经典牛顿力学规律。
(2 粒子之间的相互作用满足叠加原理。
显然这两条忽略了量子效应和多体作用 , 与真实物理系统存在一定差别 , 仍然属于近似计算。
假设 N 为模拟系统的原子数 , 第 i 个原子的质量为 m i , 位置坐标向量为 r i , 速度为 v i =r ・ i , 加速度为 a i =r ・・i , 受到的作用力为 F i , 原子 i 与原子 j 之间距离为 r ij =r i -r j , 原子 j 对原子 i 的作用力为 f ij , 原子 i 和原子 j 相互作用势能为 ! (r ij , 系统总的势能为 U (r 1, r 2, K r N =Ni =1! j ≠ i!" (r ij , 所有的物理量都是随时间变化的 , 即 A=A (t , 控制方程如下 :m i r ・・i =F i =j ≠ i! fij(1 F i =-#r iU (r 1, r 2, K r N(2以此建立一个线性的微分方程组 , 给定初始位置和速度 , 方程是封闭的 , 可以得到任意时刻系统中所有原子的位置r i (t 和速度 v i (t 。
2势函数2.1Lennard-Jones(L-J 势 M ie 最先提出了两体势的解析形式 , Lennard-Jones [5]将它应用到铜的自扩散研究计算中。
该两体势可表示为#(r =4ε(σr 12-(σr6%(3式中ε和σ是势参数 , r 表示原子间距。
通常为更好地拟合元素已有的实验数据 , 如结合能、晶格常数等 , L-J 势则使用一种普适的形式 [6]。
$(r =4ε(n (σr m -(n (σr n%(42.2Morse 势根据双原子分子的振动谱 [7], 提出了指数形式的相互作用势%(r =Aexp (-αr -B exp (-βr (5它有 4个势参数A , B , α和β, 与 L-J 势的普适形式相类似。
2.3Embedded Atom Method(EAM 势 Baskes 和 Daw [8]基于密度函数理论和准原子近似理论 , 导出了嵌入原子理论模型势 , 能量表示为E to t =i! F i (ρi +1i , j! i ≠ j&ij (r ij (6式中第一项为嵌入能项 , 表示原子嵌入到电子密度为ρi处的能量 , 第二项为两体相互作用项 , 而基体电子密度则表示为原子电子密度的线性叠加 , 即ρi =j (≠ i! f ij (r ij(73有限差分算法3.1Verlet 算法 [9]将t +Δt 和 t -Δt 时粒子的位置坐标分别用时刻 t 的位置坐标作泰勒展开有 : [下转第 34页 ]r (t +Δt =r (t +Δt・ V(t +(Δt 2a (t +L r (t -Δt =r (t -Δt ・ V(t +(Δt 2a (t +L ! ####" ####$(8由式 (8 可得t +Δt 时刻粒子的位置为:r (t +Δt B2r (t -r (t -Δt +(Δt 2F (t (9相应的速度为 :V(t B r (t +Δt -r (t -Δt (10 式中 , m , V (t , a (t 和 F (t 分别为原子的质量、速度、加速度以及所受到的力。
3.2Leap-frog 算法 [10]Hockney 对 Verlet 算法进行了改进 , 提出 Leap-frog 算法:r (t +Δt =r (t +Δt ・ V (t +Δt V (t +Δt =V (t -Δt +Δt F (t ! ####" ####$(11 3.3其它算法Verlet 和 Leap-frog 算法只能求解线性常微分方程。
为了求解非线性常微分方程 , Gear 提出了基于预测 -校正积分方法的 Gear 算法。
Swope 提出的 Velocity-Verlet 算法可同时得出位置、速度与加速度 , 且不牺牲精度 , 优点是给出了显式速度项 , 计算量适中。
Beeman 提出的 Beeman 算法运用了更精确的速度表达式 , 能更精确地计算系统动能 , 但表达式很复杂 , 计算量很大。
4不同系综的分子动力学模拟4.1微正则系综(NVE 微正则系综是孤立的、保守的系统 , 即所模拟的系统中粒子数 N 、体积 V 、能量 E 都不变。
此外 , 由于整个系统并未运动 , 所以整个系统的总动量为零。
在系统的演化过程中 , 系统沿着相空间中的恒定能量轨道演化。
在模拟中不需要对系统进行能量控制 , 系统能量自然保持守恒。
4.2正则系综(NVT 在正则系综下 , 系统的粒子数 N 、体积 V 和温度 T 都保持不变。
在恒温下 , 系统的总能量不是一个守恒量 , 系统要与外界发生能量交换。
保持系统的温度不变 , 通常运用的方法是让系统与外界的热浴处于热平衡状态 , 也可以通过对速度进行直接标度来实现恒定的温度。
4.3等温等压系综(NPT 等温等压系综具有确定的粒子数 N 、恒定的温度 T 和恒定的压力 P 。
温度控制和以前一样 , 通过对速度加一些约束来实现。
而对压力的调节 , 比较复杂。
由于系统的压力与其体积是共轭量 , 要调节压力值可以通过标度系统的体积来实现。
4.4等焓等压系综(NHP 等焓等压系综是保持系统的粒子数 N 、压力 P 和焓值 H 都不变。
模拟时要保持压力与焓值为固定值 , 有一定难度。
事实上 , 这种系综在实际的分子动力学模拟中很少见。
5宏观统计量的提取5.1温度温度 T 直接与粒子的动能相关 , 即著名的均匀分布公式。
粒子的每个自由度赋予 K B T /2的能量 , N 个粒子的总自由度为3N , 故系统温度 T 与动能 K 的关系为 [11]:K=Ni =1%m i v 2=2NK T (12式中 , K B 为 Boltzmann 常数 , v i 为原子 i 速度。
5.2压力PV =NK B T +1i%r i ・ F i 〉 (13这是著名的 Virial 方程 [11]。
式中 , P 为压力 , V 为元胞体积 ,T 为系统温度 , N 为系统总的粒子数目 , D 为系统维数 , K B 为Boltzmann 常数 , F i 为原子 i 所受的原子间作用力 , r i 为原子 i的位置 , 〈〉表示对括号内的量在 t 时刻求平均。
5.3系统总能量E =E k +E p =〈 1i %m i ・ v i 2〉+〈 i%u ij ・ (r ij 〉 (14式中右端第一项为系统总动能 , 第二项为系统总势能。
6结束语分子动力学方法是用运动方程来计算系统的性质 , 结果得到的既有系统的静态特性 , 也有动态特性 [12]。
M D 模拟方法面临着两个基本限制 :一个是有限观测时间的限制 ; 另一个是有限系统大小的限制。
自 20世纪 50年代中期开始 , M D 方法得到了广泛的应用。
目前 , 分子动力学方法还在进一步发展中。
参考文献 :[1][2][3][4][5][6][7][8][9][10][11][12]文玉华 , 朱如曾 , 周富信 , 等 . 分子动力学模拟的主要技术 [J]. 力学进展 , 2003, 33(1:65-73.Heermann D.W. Computer Simulation M ethods in Theoretical Physics[M ]. Springer-Verlag Press,1990.Liem S Y , Chen K Y. Simulation study of platinum adsorption on.graphite using the Sutton – Chen potential [J].Surf. Science, 1995, (328 :119-128.温诗铸 . 纳米摩擦学 [M ]. 北京 :清华大学出版社 , 1998:60-80.Lennard-Jones J E. On the determination of molecular fields [J]. Pro-ceedings of the Poyal Society. 1924,A(106 :463-469. Zhen Shu, Davies G J. Calculation of the Lennard-Jones nm potentialenergy parameters for metals[J]. Phys Stat Sol, 1983,A(78 :595-605. M orse P M . Diatomic molecules according to the ware mechanics ⅡVi-brational Levels[J]. Phys Rev, 1929,(34 :57-64. Daw M S, Baskes M I. Embedded atom method:derivation and applica-tion to impurties, surfaces, and other defects in metals [J]. Phys Rev, 1984,B(29 :6443-6453. Verlet L. Computer ‘ experiments ’ on classical fluidsⅠ :Thermody-namical properties of Lennard-Jones molecules [J]. Pysical Review, 1967,(159 :98-103. Honeycutt R W. The potential calculation and some application [J].M ethods in Computational Pysics, 1970,(9 :136-211. 吴恒安 . 纳米尺度下结构和材料力学行为的分子动力学模拟研究[D]. 合肥 :中国科学技术大学 , 2002.张会臣 , 严立 . 纳米尺度润滑理论及应用 [M ]. 北京 :化学工业出版社 ,2005:182-185.[上接第 30页 ]The Overview of Molecular Dynamics SimulationSHEN Hai-lan , ZHAO Jing-song(M echanical Engineering School of Xidian University, Xi ’ an 710071, ChinaAbstract :This article discusses the principle of molecular dynamics, interatomic potentials (for example, Lennard-Jones potential, somecommon finite difference algorithms (such as Verlet algorithm, several molecular dynamics simulation ensembles, and the extraction of useful information.Key words :molecular dynamics ; interatomic potential ; finite difference algorithm ; ensemblesDesign and Development of Dynamic Balance Experiment Device for the Dual-RotorSynchronized SystemLI Xi-ling , ZHANG Zhi-xin , HE Shi-zheng(Institute of Chemistry and M achinery Engineering, Zhejiang University, Hangzhou 310027, ChinaAbstract :This paper designs an experimental machine of dual-rotor for dynamic balance. And the system for getting signal based on Lab-VIEW is proposed. Through the machine designed in this paper the basis and vibration signal can be obtained, and several experiment about dynamic-balance can be taken.Key words :Dual-rotor system ; Dynamic-balance图 , 转鼓材质为无缝钢管 , 钢管端面焊接法兰用于连接端盖。