拉氏变换与反变换
- 格式:doc
- 大小:517.00 KB
- 文档页数:30
第十三章拉普拉斯变换(Laplace Transformations)本章介绍拉普拉斯变换的定义、性质和反变换的应用;运算电路图的画法;用拉普拉斯变换分析电路。
§13-1 拉普拉斯变换定义教学目的:拉普拉斯变换的定义。
教学重点:拉普拉斯正变换,拉普拉斯变换存在的条件。
教学难点: 用拉普拉斯变换定义求几个常见函数的拉氏变换。
教学方法:课堂讲授。
教学内容:一、引言拉普拉斯拉斯变换可用于求解常系数线性微分方程,是研究线性系统的一种有效而重要的工具。
拉普拉斯拉斯变换是一种积分变换,它把时域中的常系数线性微分方程变换为复频域中的常系数线性代数方程。
因此,进行计算比较简单,这正是拉普拉斯拉斯变换(简称:拉氏变换)法的优点所在。
二、拉普拉斯拉斯变换的定义一个定义在区间的函数,其拉氏变换定义为:e-st dt式中:s=б+jω为复数,有时称变量S为复频率。
应用拉普拉斯拉斯变换进行电路分析有称为电路的复频域分析,有时称为运算法。
F(s)又称为f(t)的象函数,而f(t)称为F(s)的原函数。
通常用“L[ ]”表示对方括号内的函数作拉氏变换。
三、几个常见函数的拉氏变换1.2.§13-2 拉普拉斯变换的基本性质教学目的:本节将介绍拉氏变换的一些基本性质,利用这些基本性质,可以很容易的求得一些较复杂的原函数的象函数,同时,这些基本性质对于分析线性非时变网络也是非常必要的。
教学重点:拉普拉斯变换的性质。
教学难点: 用拉普拉斯变换的性质求得象函数。
教学方法:课堂讲授。
教学内容:一、唯一性定义在区间的时间函数与其拉氏变换存在一一对应关系。
根据可以唯一的确定其拉氏变换;反之,根据,可以唯一的确定时间函数。
唯一性是拉氏变换非常重要的性质,正是这个性质,才是我们有可能将时域中的问题变换为复频域中的问题进行求解,并使在复频域中求得的结果有可能再返回到时域中去。
唯一性的证明从略。
二、线性性质若和是两个任意的时间函数,其拉氏变换分别为和,和是两个任意常数,则有:[证]:根据拉氏变换的定义可得[例]:求的拉氏变换。
机电控制工程所涉及的数学问题较多,经常要解算一些线性微分方程。
按照一般方法解算比较麻烦,如果用拉普拉斯变换求解线性微分方程,可将经典数学中的微积分运算转化为代数运算,又能够单独地表明初始条件的影响,并有变换表可查找,因而是一种较为简便的工程数学方法。
拉普拉斯变换的定义如果有一个以时间为自变量的实变函数,它的定义域是,那么的拉普拉斯变换定义为式中,是复变数,(σ、ω均为实数),称为拉普拉斯积分;是函数的拉普拉斯变换,它是一个复变函数,通常也称为的象函数,而称为的原函数;L是表示进行拉普拉斯变换的符号。
式()表明:拉氏变换是这样一种变换,即在一定条件下,它能把一实数域中的实变函数变换为一个在复数域内与之等价的复变函数。
几种典型函数的拉氏变换1.单位阶跃函数的拉氏变换单位阶跃函数是机电控制中最常用的典型输入信号之一,常以它作为评价系统性能的标准输入,这一函数定义为单位阶跃函数如图所示,它表示在时刻突然作用于系统一个幅值为1的不变量。
单位阶跃函数的拉氏变换式为当,则。
所以()图单位阶跃函数2.指数函数的拉氏变换指数函数也是控制理论中经常用到的函数,其中是常数。
令则与求单位阶跃函数同理,就可求得()3.正弦函数与余弦函数的拉氏变换设,,则由欧拉公式,有所以)同理)4.单位脉冲函数δ(t)的拉氏变换单位脉冲函数是在持续时间期间幅值为的矩形波。
其幅值和作用时间的乘积等于1,即。
如图所示。
图单位脉冲函数单位脉冲函数的数学表达式为其拉氏变换式为此处因为时,,故积分限变为。
5.单位速度函数的拉氏变换单位速度函数,又称单位斜坡函数,其数学表达式为见图所示。
图单位速度函数单位速度函数的拉氏变换式为利用分部积分法令则所以当时,,则()6.单位加速度函数的拉氏变换单位加速度函数的数学表达式为如图所示图单位加速度函数其拉氏变换式为()拉氏变换的主要定理根据拉氏变换定义或查表能对一些标准的函数进行拉氏变换和反变换,但利用以下的定理,则对一般的函数可以使运算简化。
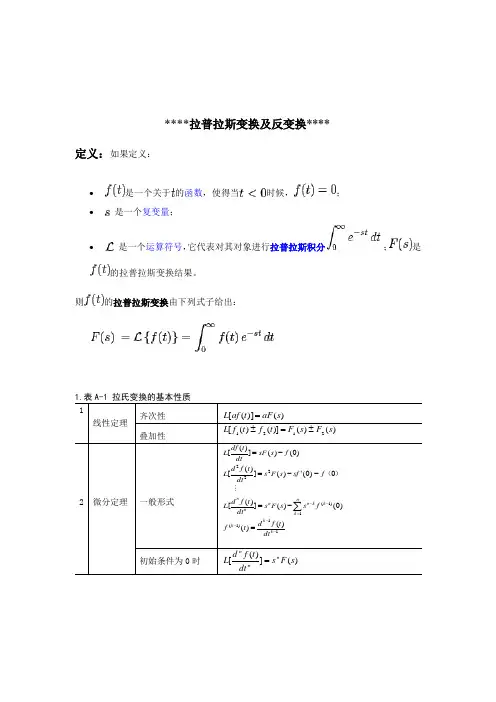
****拉普拉斯变换及反变换****定义:如果定义:• 是一个关于的函数,使得当时候,;•是一个复变量;• 是一个运算符号,它代表对其对象进行拉普拉斯积分;是的拉普拉斯变换结果。
则的拉普拉斯变换由下列式子给出:1线性定理齐次性)()]([s aF t af L =叠加性)()()]()([2121s F s F t f t f L ±=±2微分定理一般形式=-=][- -=-=----=-∑11)1()1(1222)()()0()()(0)0(')(])([)0()(])([k k k k nk k n nnn dt t f d t f f s s F s dt t f d L f sf s F s dt t f d L f s sF dt t df L )( 初始条件为0时)(])([s F s dtt f d L n nn =2.表A-2 常用函数的拉氏变换和z变换表3. 用查表法进行拉氏反变换用查表法进行拉氏反变换的关键在于将变换式进行部分分式展开,然后逐项查表进行反变换。
设)(s F 是s 的有理真分式1110111)()()(a s a s a s a b s b s b s b s A s B s F n n n n m m m m ++++++++==---- (m n >) 式中系数n n a a a a ,,...,,110-,m m b b b b ,,,110- 都是实常数;n m ,是正整数。
按代数定理可将)(s F 展开为部分分式。
分以下两种情况讨论。
① 0)(=s A 无重根这时,F(s)可展开为n 个简单的部分分式之和的形式。
∑=-=-++-++-+-=ni ii n n i i s s c s s c s s c s s c s s c s F 12211)( (F-1)式中,n s s s ,,,21 是特征方程A(s)=0的根。
拉氏变换常用公式拉氏变换是一种重要的数学工具,广泛应用于信号处理、控制系统分析和电路设计等领域。
本文将介绍拉氏变换常用的公式,包括重要的拉氏变换和反变换公式,以及一些常见的拉氏变换性质。
1. 拉氏变换公式拉氏变换公式是将一个时间域函数变换成复频域的函数。
以下是一些常用的拉氏变换公式:(1)常数信号的拉氏变换:如果输入信号为常数,即f(t)=A,其拉氏变换为F(s) = A/s,其中A 为常数。
(2)指数信号的拉氏变换:指数信号的拉氏变换公式为:f(t) = e^(at) -> F(s) = 1/(s-a),其中a为常数。
(3)单位冲激信号的拉氏变换:单位冲激信号的拉氏变换公式为:f(t) = δ(t) -> F(s) = 1,其中δ(t)表示单位冲激函数。
(4)正弦信号的拉氏变换:正弦信号的拉氏变换公式为:f(t) = sin(ωt) -> F(s) = ω/(s^2 + ω^2)。
其中ω为正弦信号的频率。
2. 拉氏反变换公式拉氏反变换是将复频域函数转换回时间域函数的过程,以下是一些常用的拉氏反变换公式:(1)常数信号的拉氏反变换:对于F(s) = A/s,其拉氏反变换为f(t) = A。
(2)指数信号的拉氏反变换:对于F(s) = 1/(s - a),其拉氏反变换为f(t) = e^(at),其中a为常数。
(3)单位冲激信号的拉氏反变换:对于F(s) = 1,其拉氏反变换为f(t) = δ(t)。
(4)正弦信号的拉氏反变换:对于F(s) = ω/(s^2 + ω^2),其拉氏反变换为f(t) = sin(ωt)。
3. 拉氏变换的性质拉氏变换具有一些重要的性质,其中包括线性性质、时间平移性质、频率平移性质、频率缩放性质、卷积定理等,这些性质对于信号处理和系统分析非常有用。
(1)线性性质:拉氏变换具有线性性质,即对于输入信号f1(t)和f2(t),以及相应的拉氏变换F1(s)和F2(s),有以下性质成立:a1*f1(t) + a2*f2(t) -> a1*F1(s) + a2*F2(s)。
拉氏变换与反变换机电控制工程所涉及的数学问题较多,经常要解算一些线性微分方程。
按照一般方法解算比较麻烦,如果用拉普拉斯变换求解线性微分方程,可将经典数学中的微积分运算转化为代数运算,又能够单独地表明初始条件的影响,并有变换表可查找,因而是一种较为简便的工程数学方法。
拉普拉斯变换的定义如果有一个以时间 t 为自变量的实变函数 ()t f ,它的定义域是 0≥t ,那么 ()t f 的拉普拉斯变换定义为()()()0e d st F s L f t f t t ∞-=∆⎡⎤⎣⎦⎰式中, s 是复变数, ωσj +=s (σ、ω均为实数), ⎰∞-0e st称为拉普拉斯积分; )(s F 是函数 )(t f 的拉普拉斯变换,它是一个复变函数,通常也称 )(s F 为 )(t f 的象函数,而称 )(t f 为 )(s F 的原函数;L 是表示进行拉普拉斯变换的符号。
式()表明:拉氏变换是这样一种变换,即在一定条件下,它能把一实数域中的实变函数变换为一个在复数域内与之等价的复变函数)(s F 。
几种典型函数的拉氏变换1.单位阶跃函数 )(1t 的拉氏变换单位阶跃函数是机电控制中最常用的典型输入信号之一,常以它作为评价系统性能的标准输入,这一函数定义为⎩⎨⎧≥<∆)0(1)0(0)(1t t t单位阶跃函数如图所示,它表示在 0=t 时刻突然作用于系统一个幅值为1的不变量。
单位阶跃函数的拉氏变换式为0e 1d e )(1)](1[)(0∞-===-∞-⎰stst st t t L s F 当 0)Re(>s ,则 0e lim →-∞→st t 。
所以[]s s s t L st 1)1(00e 1)(1=⎥⎦⎤⎢⎣⎡--=∞-=-()图 单位阶跃函数 2.指数函数的拉氏变换指数函数也是控制理论中经常用到的函数,其中 是常数。
令则与求单位阶跃函数同理,就可求得()3.正弦函数与余弦函数的拉氏变换 设,,则由欧拉公式,有所以⎥⎦⎤⎢⎣⎡-=-∞--∞⎰⎰t t s F st t stt d e e d e e j 21)(0j 0j 1ωω ⎥⎦⎤⎢⎣⎡-=-∞+-∞--⎰⎰t t stt s t s d e e d e j 210)j (0)j (ωω⎥⎥⎦⎤⎢⎢⎣⎡∞+-∞--=+---0e j 10e j 1j21)j ()j (t s t s s s ωωωω22j 1j 1j 21ωωωω+=⎪⎪⎭⎫ ⎝⎛+--=s s s) 同理)4.单位脉冲函数 δ(t ) 的拉氏变换单位脉冲函数是在持续时间期间幅值为的矩形波。
其幅值和作用时间的乘积等于1,即。
如图所示。
图 单位脉冲函数单位脉冲函数的数学表达式为其拉氏变换式为此处因为时,,故积分限变为。
5.单位速度函数的拉氏变换单位速度函数,又称单位斜坡函数,其数学表达式为见图所示。
图单位速度函数单位速度函数的拉氏变换式为利用分部积分法令则所以当时,,则()6.单位加速度函数的拉氏变换单位加速度函数的数学表达式为如图所示图单位加速度函数其拉氏变换式为()拉氏变换的主要定理根据拉氏变换定义或查表能对一些标准的函数进行拉氏变换和反变换,但利用以下的定理,则对一般的函数可以使运算简化。
1.叠加定理拉氏变换也服从线性函数的齐次性和叠加性。
(1)齐次性设,则()式中——常数。
(2)叠加性设,,则()两者结合起来,就有这说明拉氏变换是线性变换。
2.微分定理设则式中——函数在时刻的值,即初始值。
同样,可得的各阶导数的拉氏变换是()式中,,…——原函数各阶导数在时刻的值。
如果函数及其各阶导数的初始值均为零(称为零初始条件),则各阶导数的拉氏变换为()3.复微分定理若 可以进行拉氏变换,则除了在的极点以外,()[]()s F s t tf L d d-=()式中, 。
同样有()[]()s F s t f t L 222d d =一般地,有()()()d 11,2,3,d nnnn L t f t F s n s ⎡⎤=-=⎣⎦()4.积分定理 设,则() 式中——积分在时刻的值。
当初始条件为零时,()对多重积分是()当初始条件为零时,则()5.延迟定理设,且时,,则()函数为原函数沿时间轴延迟了,如图所示。
图函数6.位移定理在控制理论中,经常遇到一类的函数,它的象函数只需把用代替即可,这相当于在复数坐标中,有一位移。
设,则()例如的象函数,则的象函数为7.初值定理它表明原函数在时的数值。
()即原函数的初值等于乘以象函数的终值。
8.终值定理设,并且存在,则()即原函数的终值等于乘以象函数的初值。
这一定理对于求瞬态响应的稳态值是很有用的。
9.卷积定理设,,则有()即两个原函数的卷积分的拉氏变换等于它们象函数的乘积。
式()中,为卷积分的数学表示,定义为10.时间比例尺的改变()式中——比例系数例如,的象函数 ,则的象函数为11.拉氏变换的积分下限在某些情况下,在处有一个脉冲函数。
这时必须明确拉普拉斯积分的下限是还是,因为对于这两种下限,的拉氏变换是不同的。
为此,可采用如下符号予以区分:若在 处 包含一个脉冲函数,则因为在这种情况下显然,如果 在处没有脉冲函数,则有拉普拉斯反变换 拉普拉斯反变换的公式为()[]⎰∞+∞--==j j 1d e )(πj 21)(c c stss F s F L t f ()式中 1-L ——表示拉普拉斯反变换的符号通常用部分分式展开法将复杂函数展开成有理分式函数之和,然后由拉氏变换表一一查出对应的反变换函数,即得所求的原函数 )(t f 。
1.部分分式展开法在控制理论中,常遇到的象函数是的有理分式为了将写成部分分式,首先将的分母因式分解,则有式中,,,…,是的根的负值,称为的极点,按照这些根的性质,可分为以下几种情况来研究。
2.的极点为各不相同的实数时的拉氏反变换()式中,是待定系数,它是处的留数,其求法如下()再根据拉氏变换的迭加定理,求原函数[例 ] 求的原函数。
解: 首先将的分母因式分解,则有即得3.含有共轭复数极点时的拉氏反变换如果有一对共轭复数极点 ,,其余极点均为各不相同的实数极点。
将展成式中,和可按下式求解即()因为(或)是复数,故式()两边都应是复数,令等号两边的实部、虚部分别相等,得两个方程式,联立求解,即得,两个常数。
[例 ] 已知,试求其部分分式。
解: 因为()含有一对共轭复数极点,和一个极点,故可将式()因式分解成()以下求系数、和。
由式()和式()相等,有()用乘以上式两边,并令,得到上式可进一步写成由上式两边实部和虚部分别相等,可得联立以上两式,可求得为了求出系数,用乘方程()两边,并令,将代入,得<![endif]>将所求得的 ,,值代入(),并整理后得的部分分式查拉氏变换表便得,结果见式()。
[例 ] 已知求。
解: 将的分母因式分解,得利用方程两边实部、虚部分别相等得解得,所以这种形式再作适当变换:查拉氏变换表得4.中含有重极点的拉氏反变换设有r个重根,则将上式展开成部分分式()式中,,,…,的求法与单实数极点情况下相同。
,,…,的求法如下:……则)[例 ] 设,试求的部分分式。
解: 已知()含有2个重极点,可将式()的分母因式分解得()以下求系数、和。
将所求得的、、值代入式(),即得的部分分式查拉氏变换表可得。
[例 ] 求的拉氏反变换。
解: 将展开为部分分式上式中各项系数为于是查拉氏变换表,得5.用MATLAB展开部分分式(1) 概述MATLAB是美国Math Works公司的软件产品,是一个高级的数值分析、处理与计算的软件,其强大的矩阵运算能力和完美的图形可视化功能,使得它成为国际控制界应用最广的首选计算机工具。
SIMULINK是基于模型化图形的动态系统仿真软件,是MATLAB的一个工具箱,它使系统分析进入一个崭新的阶段,它不需要过多地了解数值问题,而是侧重于系统的建模、分析与设计。
其良好的人机界面及周到的帮助功能使得它广为科技界和工程界所采用。
(2) 用MATLAB进行部分分式展开MATLAB有一个命令用于求B(s)/A(s)的部分分式展开式。
设s的有理分式为式中(i=)和(j=)的某些值可能为零。
在MATLAB 的行向量中,num和den分别表示F(s)分子和分母的系数,即num=[]den=[1 ]命令[r,p,k]=residue(num,den)MATLAB将按下式给出F(s)部分分式展开式中的留数、极点和余项:上式与式()比较,显然有p(1)=-p1,p(2)=-p2,…,p(n)=-p n;r(1)=A1,r(2)=A2,…,r(n)=A n;k(s)是余项。
[例] 试求下列函数的部分分式展开式解:对此函数有num=[1 11 39 52 26]den= [1 10 35 50 24]命令[r,p,k]=residue(num,den)于是得到下列结果[r,p,k]=residue(num,den)r=p=k= 1则得如果F(s)中含重极点,则部分分式展开式将包括下列诸项式中,p(j)为一个q重极点。
[例] 试将下列函数展开成部分分式解:对于该函数有num=[0 1 4 6]den =[1 3 3 1]命令[r,p,k]=residue(num,den)将得到如下结果:[r,p,k]=residue(num,den)r=p=k=[ ]所以可得注意,本例的余项k为零。
应用拉氏变换解线性微分方程应用拉氏变换解线性微分方程时,采用下列步骤:(1) 对线性微分方程中每一项进行拉氏变换,使微分方程变为s的代数方程;(2) 解代数方程,得到有关变量的拉氏变换表达式;(3) 用拉氏反变换得到微分方程的时域解。
整个求解过程如图所示。
设系统微分方程为若,初始条件分别为、,试求。
解: 对微分方程左边进行拉氏变换利用迭加定理将上式逐项相加,即得方程左边的拉氏变换对方程右边进行拉氏变换得写成一般形式应该强调指出是微分方程的特征方程,也是该系统的特征方程。
利用部分分式将展开为求待定系数、、、、:代入原式得查拉氏变换表得当初始条件为零时,得。