步进电机驱动芯片THB6064
- 格式:pdf
- 大小:705.57 KB
- 文档页数:10

以下是中国步进电机网对步进电机驱动系统所做的较为完整的表述:1、系统常识:步进电机和步进电机驱动器构成步进电机驱动系统。
步进电机驱动系统的性能,不但取决于步进电机自身的性能,也取决于步进电机驱动器的优劣。
对步进电机驱动器的研究几乎是与步进电机的研究同步进行的。
2、系统概述:步进电机是一种将电脉冲转化为角位移的执行元件。
当步进电机驱动器接收到一个脉冲信号(来自控制器),它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
3、系统控制:步进电机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电机驱动器)。
控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
4、用途:步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。
步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。
5、步进电机按结构分类:步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
(1)反应式步进电机:也叫感应式、磁滞式或磁阻式步进电机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
(2)永磁式步进电机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。

THB6064MQ驱动板使用说明端子说明:信号输入端(默认的信号电平是5V,高于5V则要串接电阻限流,否则会影响光耦的寿命)⑴ CK+: 脉冲信号输入正端。
⑵ CK-: 脉冲信号输入负端。
⑶ CW+: 电机正、反转控制正端。
⑷ CW-: 电机正、反转控制负端。
⑸ EN+: 电机脱机控制正端。
(脱机,是指关闭驱动芯片的功率输出。
一般应用,该端口不需要接)⑹ EN-: 电机脱机控制负端。
(脱机,是指关闭驱动芯片的功率输出。
一般应用,该端口不需要接)电机绕组连接:(对于8线电机,可以串联或并联后接入,六线电机,余下的两根线应该空着不接)⑴ A+:连接电机绕组A 相。
⑵ A-:连接电机绕组A- 相。
⑶ B+:连接电机绕组B 相。
⑷ B+:连接电机绕组B- 相。
工作电压的连接:⑴ VM: 连接直流电源正。
(输入电压范围是9V~40V)⑵ GND:连接直流电源负。
电路板尺寸:100MM(长) * 80MM(宽) * 35MM(高)特性● 供电电压可达42VDC(考虑到稳压芯片的耐压,建议选择在40V 以内工作)● 输出电流最高可达3.6A● 锁相电流可设定成半流或 90%的工作电流。
选择半流可以明显降低锁相功耗● 可驱动4,6,8线,85机座及以下的步进电机● 光隔离信号输入● 步进脉冲频率最高可达200KHz● 电流设定多达16档,具体根据需要来设置 (建议匹配1A ~ 3.5A的步进电机)● 细分多达8档可选: 2、8、10、16、20、32、40、64。
● 具有过温、过流保护功能(保护时会直接关闭输出,需要断电重启才恢复正常)应用领域适合各种中小型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图 仪、数控机床、自动装配设备等。
在用户期望小噪声、高速度的设备中应用效果特佳。
▓ 输入信号接口输入信号共有三路,它们分别是:①步进脉冲信号CK+、CK- ;②方向电平信号CW+、CW- ;③脱机信号EN+、EN- 。
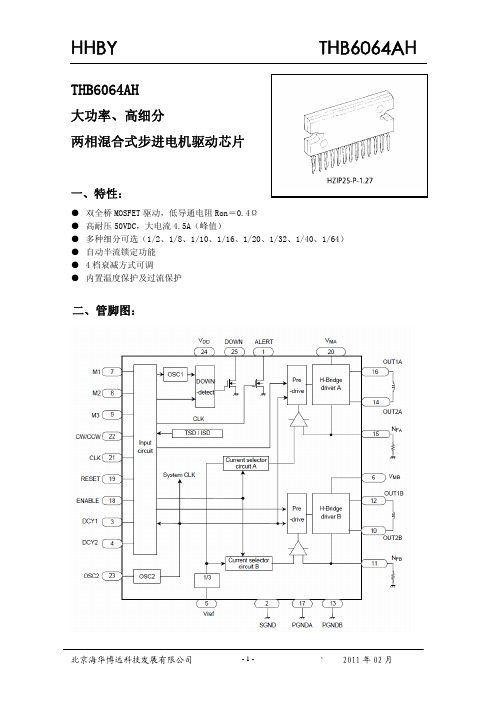
THB6064H大功率、高细分两相混合式步进电机芯片式驱动器一、特性:● 双全桥MOSFET驱动,低导通电阻R on=0.4Ω(上桥+下桥)● 高耐压50VDC,大电流4.5A(峰值)● 多种细分可选(1/2、1/8、1/10、1/16、1/20、1/32、1/40、1/64)● 自动半流锁定功能● 衰减方式连续可调● 内置温度保护及过流保护重量: 9.86 g (typ.)二、框图:V DD DOWN ALERT V MA SGND PGNDA ENABLEPGNDB三、管脚说明:管脚 编号 输入/输出符号 功 能 描 述1 输出 ALERT 温度保护及过流保护输出端(常态为1,过流保护时为0)2 — SGND 信号地外部与电源地相连3 — OSC1B B相斩波频率控制端4 输入 PFD 衰减方式控制端5 输入 Vref 电流设定端(0—3V)6 输入 VMB 电机驱动电源 B相电源与A相电源相连7 输入 M1 细分数选择端(详见附表)8 输入 M2 细分数选择端(详见附表)9 输入 M3 细分数选择端(详见附表)10 输出 OUT2B B相功率桥输出端211 — NFB B相电流检测端应连接大功率检测电阻,典型值0.25Ω/2W12 输出 OUT1B B相功率桥输出端113 — PGNDB B相驱动电源地与A相电源地及信号地相连14 输出 OUT2A A相功率桥输出端215 — NFA A相电流检测端应连接大功率检测电阻,典型值0.25Ω/2W16 输出 OUT1A A相功率桥输出端117 — PGNDA 驱动电源地线18 输入 ENABLE 使能端ENABLE=0所有输出为0,ENABLE=1正常工作19 输入 RESET 上电复位端20 输入 VMA A相电机驱动电源与A相电源相连21 输入 CLK 脉冲输入端22 输入 CW/CCW 电机正反转控制端23 — OSC1A A相斩波频率控制端24 输入 VDD 5V电源芯片工作电源要求稳压25 输出 Down 半流锁定控制端四、电器参数:最高额定值Absolute Maximum Ratings (Ta = 25°C)参数符号额定值单位V DD 6最高电源电压VV MA/B50最大输出电流I O (PEAK) 4.5(Note 1)每相最高芯片工作电压V IN 5.5V工作温度范围T opr−30 to 85 °C储存温度范围T stg−55 to 150 °C正常运行参数范Operating Range (Ta =30 to 85°C)围参数符号测试条件最小典型. 最大单位芯片工作电压V DD⎯ 4.5V5.55.0电源电压V MA/B V MA/B≥ V DD 4.5 ⎯ 42 V 输出电流I OUT⎯⎯⎯ 4 A 输入端口电压V IN⎯ 0⎯ 5.5V 电流设定端V ref⎯ 0.5⎯3输入脉冲f CLK⎯⎯⎯100 kHz电器特性Electrical Characteristics (Ta = 25°C, V DD = 5 V, V M = 24 V参数符号测试条件最小 典型 最大 单位高 V IN (H) 2.0 ⎯V DD输入电压低V IN (L)M1, M2, M3, CW/CCW, CLK, RESET, ENABLE−0.2⎯ 0.8VI IN (H)M1, M2, M3, CW/CCW, CLK, RESET, ENABLE V IN = 5.0 V ⎯ 55 (80)输入电流I IN (L)V IN = 0 V⎯⎯ 1μA I DD1输出开路, RESET: H, ENABLE: H M1:L, M2:L, M3:L (半步模式) ⎯ 3 (7) I DD2RESET: L, ENABLE: H ⎯ 2 (7) 静态功耗I DD3RESET: L, ENABLE: L ⎯ 2 (7) mAI M1RESET: H/L, ENABLE: L ⎯ 0.5V M supply currentI M2RESET: H/L, ENABLE: H⎯1mA慢衰减模式 3.5 ⎯ V DD混合式衰减模式 (0.9) 1.1 (3.3)衰减方式 输入电压范围 V PFD 块衰减模式⎯⎯ 0.8V最小脉冲宽度 t W (CLK)⎯ 10 ⎯μs温度保护 TSD ⎯ 170 ⎯ °C 关断时间T OFF1A , C OSC1A, C OSC1B = 1000pF16 23 35 μsecT OFF1B半流锁定时间典型值 (0.75) 1.5 (3.0) Hz输出参数Output Block参数符号测试条件最小 典型 最大 单位输出电阻 Ron H + Ron L I OUT = 4 A ⎯ 0.4 (0.6) Ω t r ⎯ 0.1 ⎯ R L = 2 Ω, V NF = 0 V,C L = 15 pF开关特性t f⎯ 0.1 ⎯μs五、使用说明1.M1、M2、M3可选择八种不同细分状态M1 M2 M3 细分数0 0 0 1/20 0 1 1/80 1 0 1/100 1 1 1/161 0 0 1/201 0 1 1/321 1 0 1/401 1 1 1/642.PFD:为衰减方式控制端,调节此端电压可以选择不同的衰减方式,从而获得更好的驱动效果:衰减方式V PFD慢衰减3.5<V PFD<V DD混合式衰减1.1V<V PFD<3.1VV PFD<0.8V 快衰减3.Vref:电流设定端,调整此端电压即可设定驱动电流值Io(100%)=Vref*(1/3)*(1/Rs)Vref取值范围:0.5V—3.0V【Rs为检测电阻】 推荐值为0.25Ω/2W4.Down:半流锁定控制,电机锁定时降低功耗的功能。

步进电机驱动芯片步进电机驱动芯片是一种用于驱动步进电机的集成电路芯片。
步进电机是一种将电脉冲信号转换成机械转动的电机,其特点是能够准确地控制旋转角度和速度,广泛应用于精密控制系统中。
步进电机驱动芯片的功能是将控制信号转换成电压信号,通过这些电压信号来驱动步进电机,控制其转动。
步进电机驱动芯片通常由多个功能模块组成,包括电流控制模块、脉冲生成模块、逻辑控制模块等。
其中,电流控制模块是步进电机驱动芯片的核心部分之一。
步进电机需要通过施加不同电流来控制转矩大小和转速,电流控制模块通过对输入信号进行分析和处理,生成相应的电压信号,控制步进电机的电流输出。
这样可以准确控制步进电机的运动性能,提高其工作效率和稳定性。
脉冲生成模块是步进电机驱动芯片的另一个重要组成部分。
步进电机通过接收一系列脉冲信号来驱动转动,脉冲生成模块能够根据输入信号的频率和脉冲数目,准确地生成相应的脉冲信号,控制步进电机的旋转角度和速度。
这样可以实现对步进电机的精确控制,满足不同应用需求。
逻辑控制模块是步进电机驱动芯片的另一重要功能模块。
它通过对输入信号进行逻辑分析和处理,控制步进电机的正转、反转、停止等运动状态。
逻辑控制模块能够识别不同的输入信号,并根据预设逻辑规则生成相应的控制信号,驱动步进电机按照特定的运动模式进行工作。
步进电机驱动芯片具有小巧、高集成度、低功耗等优点,使得步进电机的控制更加便捷和灵活。
它广泛应用于数控机床、机器人、自动化设备等领域,为这些领域的精密控制提供了可靠的解决方案。
随着科技的不断发展,步进电机驱动芯片也在不断创新与提升。
目前,一些步进电机驱动芯片采用了闭环控制技术,能够实时检测电机的位置和速度信息,提高步进电机的定位精度和动态响应性能。
此外,一些步进电机驱动芯片还具备了多种保护功能,如过流保护、过热保护等,避免步进电机因异常工作而受损。
综上所述,步进电机驱动芯片是一种广泛应用于精密控制系统中的集成电路芯片,能够准确地控制步进电机的旋转角度和速度。

THB6064布线示意图。
需要特别注意地线回路,THB系列驱动芯片的地线处理不能像普通的数字芯片、模拟芯片的地线处理那样区分大电流、小电流的地线回路。
在THB系列驱动芯片的设计应用中,优先保证SGND和PGND之间的连接最短化,绝对不能把SGND和PGND分开单独布各自的地回路;SGND与PGND之间也不能加磁珠,必须是最短化直接连接,并尽量加粗连接线宽。
检测电阻与芯片的连接线尽可能短而粗,连线长度最好<1 CM;线宽要考虑能通过最大的电流,并尽量加粗一点,以减小阻抗的影响(线的宽度,关系到线路的阻抗;线的长度关系到感抗;在di/dt 相对大的线路,即使是纳哼级的电感都可能会造成严重的后果)。
其实THB系列驱动芯片的设计主要是保证SGND和PGND的地平面与检测电阻接地端的地平面一置。
上图中粉红色的粗线尽量保证在同一层布线,避免在不同层间切换连接,因为它们决定电流控制的效果和过流保护电路是否有效。
黄色的粗线也是,虽然PGND通过的电流并不大,不过di/dt却不小,短而粗是必须的。
红色的粗线中的纹波比较大,特别是低速的情况下;这段线路也是建议尽量短而粗,并避免在不同层间切换布线,必须切换布线时,请多放置几个过孔。
关于驱动电源部分,无论是开关电源、普通模拟电源、线性稳压电源甚至是电池供电,都必须加上电解电容或其它大容量电容进行滤波,以保证驱动效果;建议选择高频低阻的电解电容,再并入0.1uF电容进行退耦,并靠近芯片放置。
电解电容最小要47uF以上的,具体根据实际的工作电流来决定。
大容量电解电容体积相对较大,尤其是高频低阻类的电解电容体积都特别大;可以在靠近芯片的VM脚放置47uF的小电解电容和小容量退耦电容,然后驱动板上的电源输入端放置大容量的电解电容引用| 回复| 2010-12-05 17:47:08 2楼吝啬这个图是错误设计示范,SGND单独布地线回路、串磁珠、串电阻都可能会造成过流保护电路误触发或者甚至失效引用| 回复| 2010-12-05 17:51:59 3楼吝啬同样是错误设计示范图,SGND和PGND分开布线。

THB6064H 大功率、高细分两相混合式步进电机芯片使用说明一、特性:● 双全桥MOSFET 驱动● 高耐压55V● 大电流4.5A(峰值)● 低导通电阻R on =0.4Ω(上桥+下桥)● 多种细分可选(1/2、1/8、1/10、1/16、1/20、1/32、1/40、1/64) ● 内置温度保护及过流保护封装:HZIP25-P-1.27 (尺寸:36×17mm)重量:9.86 g二、框图:M3SGNDPGNDA PGND B三、管脚说明:Pin No I/O Symbol Functional Description1 Output ALERT 温度保护及过流保护输出端2 — SGND 信号地外部与电源地相连3 — PWM 斩波频率控制端4 Input FDT 衰减方式控制端5 Input V ref电流设定端6 Input VMB 电机驱动电源 B相电源与A相电源相连7 Input M1 细分数选择端(详见附表)8 Input M2 细分数选择端(详见附表)9 Input M3 细分数选择端(详见附表)10 Output OUT2B B相功率桥输出端211 — NFB B相电流检测端应连接大功率检测电阻一般为0.1Ω/2W12 Output OUT1B B相功率桥输出端113 — PGNDB B相驱动电源地与A相电源地及信号地相连14 Output OUT2A A相功率桥输出端215 — NFA A相电流检测端应连接大功率检测电阻一般为0.1Ω/2W16 Output OUT1A A相功率桥输出端117 — PGNDA 驱动电源地线18 Input ENABLE 使能端ENABLE=0所有输出为ENABLE=1正常工作19 Input RESET 上电复位端20 Input VMA A相电机驱动电源与A相电源相连21 Input CLK 脉冲输入端22 Input CW/CCW 电机正反转控制端23 — OSC2 自动半流锁定反应时间调整端,需处接电容典型值1500P,可从0.2秒~2秒24 Input V DD5V电源芯片工作电源要求稳压(4.5V~5.5V)25 Output D OWN半流锁定控制端四、使用说明1.M1、M2、M3可选择八种不同细分状态M1 M2 M3 细分数0 0 0 1/20 0 1 1/80 1 01 1/101 0 1 1/161 0 0 1/201 0 1 1/321 1 0 1/401 1 1 1/642.PFD为衰减方式控制端,调节此端电压可以选择不同的衰减方式,从而获得更好的驱动效果:V PFD衰减方式3.5<V PFD<V DD快衰减1.1V<V PFD<3.1V混合式衰减0V<V PFD<0.8V 慢衰减3.Vref:电流设定端,调整此端电压即可设定驱动电流值Io=Vref/5Rs 【Rs为检测电阻】4.D OWN:半流锁定控制与P23脚OSC2一起完成,电机锁定时降低功耗的功能。

管道内窥系统设计探究摘要:管道内窥系统是地下管线探测设备发展的重要方向,本文提出一种管道内窥系统的设计方案,详细介绍了各部分的设计思路和工作原理。
首先在机械设计中分析了系统受力情况,根据受力计算结果选择了电机。
然后在电路部分针对所选电机设计驱动电路,并且设计了直流载波通讯和视频传输等电路。
最后在软件设计部分,对不同模块进行功能划分,给出了软件结构图。
关键词:管道内窥系统;机械设计;直流载波;视频传输;软件设计引言地下管线作为城市基础设施重要组成部分,主要承担着通信、供电、供水、能源供给等重要职能,是城市的“生命线”。
随着城市化进程的不断加快,地下管线的规模也不断增加,有限的地下空间中,交错分布着各类的管线,为其日常的管理和维护工作带来了巨大的挑战。
近年来,我国发生了很多由地下管线引起的安全事故,给人们的财产和安全带来了巨大的威胁。
目前,国内市场上也有很多类型的地下管线探测设备,按其使用特点可分为介入式探测设备和外置式探测设备。
这些设备只能探测地下管线的位置,无法满足实时查看管道内部画面的需求。
由于西方国家工业发展水平较高,管道内窥设备发展较早,早在2000年左右德国和澳大利亚就已经有基于CCTV的管内检测系统[1],该检测系统可以在管道中运行,并且拍摄管内画面。
国内管道内窥设备发展较晚,市场上还没有特别成熟的产品,而且价格都比较高,大大提高了施工成本,不利于工程应用。
综合国外内窥设备的特点,立足国内施工需求,本文提出设计的管道内窥系统具有简单、高效、成本低等优点。
(国内外的研究现状论述不够)(引用不够)1、管道内窥系统的整体设计思路本文提出的管道内窥系统。
其功能框图如下:其中。
包含机械、硬件电路和软件等三部分设计内容。
机械部分是系统的载体,不同功能的模块需要不同的机械结构。
硬件电路为系统各个功能模块提供不同的电压和控制信号,硬件电路的原理如图1所示。
软件分为嵌入式软件和上位机软件,嵌入式软件与硬件电路配合产生所需要的控制信号,上位机软件用于发送指令和查看实时画面。
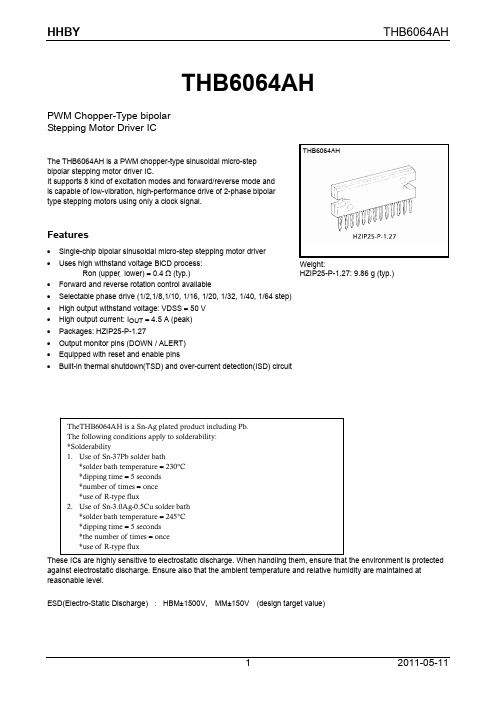
介绍二相步进电机驱动芯片THB6064AH及其应用摘要: THB6064AH是北京海华博远科技与日本东芝半导体公司合作推出的高性能步进电机驱动芯片,本文主要介绍它的原理及其应用。
其稳定的性能、便宜的价格、简洁的外围线路,为实现高性能、低成本、小型化步进电机驱动方案提供了最佳选择。
引言:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
步进电机具有惯量低、定位精度高、无累积误差、控制简单等特点,在机电一体化产品中应用广泛,常用作定位控制和定速控制。
然而,随着市场竞争起来越激烈,对产品的成本、高度集成化、功能模块化等方面要求也越来越高。
选择专用驱动芯片的步进电机驱动方案越来越受重视。
目前市面上常见的双极型微步电机驱动芯片最高细分在16细分以内,输出峰值电流都在3.5A 以内,耐压限制在40VDC。
像A3977、TA8435、TB6560A、THB6016等,只能匹配2.5A以内、57机座以下的电机,无法驱动更大功率的步进电机。
为了打破这一局限,北京海华博远科技与日本东芝半导体公司合作推出高耐压、大电流、多细分高性能步进电机驱动芯片 THB6064AH。
一: THB6064AH 简介THB6064AH 是北京海华博远科技与日本东芝半导体公司合作推出的,是一款整合逻辑模块和功率模块于一身的高性能两相混合式步进电机驱动芯片。
配合简单的外围电路即可实现高性能、多细分、大电流的步进电机驱动。
因其驱动噪音低、震动小,性能可靠、性价比高的特点,适用于各行业的自动化设备。
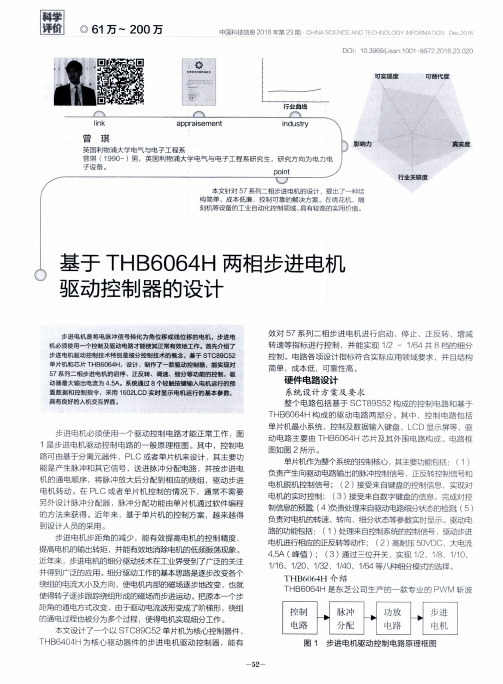
其主要特点有:● 双全桥MOSFET驱动,低导通电阻Ron=0.4Ω(上桥+下桥)● 耐压高达50VDC,VM工作电压范围大● 峰值电流4.5A,输出电流连续可调● 多达8种细分可选(1/2、1/8、1/10、1/16、1/20、1/32、1/40、1/64)● 采用脉宽调制 斩波驱动方式● 自动限流、半流锁定功能● 提供四种衰减方式切换选择●内置温度保护及过流保护●低电压检测(UVLO)电路二:芯片内部方框示意图图1从上面图1方框图可以看出THB6064AH的输入输出接口非常简单,直接在CLK端输入脉冲就可以控制电机转动,改变 CW/CCW 端的电平就可以切换电机转动的方向。

THB6064单轴驱动器使用说明产品展示说明图接线端子定义说明信号输入端⑴CP+:脉冲信号输入正端。
⑵CP-:脉冲信号输入负端。
⑶U/D+:电机正、反转控制正端。
⑷U/D-:电机正、反转控制负端。
⑸EN+:电机脱机控制正端。
⑹EN-:电机脱机控制负端。
电机绕组连接:⑴A+:连接电机绕组A+相。
⑵A-:连接电机绕组A-相。
⑶B+:连接电机绕组B+相。
⑷B-:连接电机绕组B-相。
工作电压的连接:⑴VCC:连接直流电源正(注意:10V <VCC <40V)。
⑵GND:连接直流电源负。
详细见产品展示说明图信号输入端光耦隔离接法输入信号接口有两种接法:用户可根据需要采用共阳极接法或共阴极接法。
1、共阳极接法:分别将CP+,U/D+,EN+连接到控制系统的电源上,如果此电源是+5V 则可直接接入,如果此电源大于+5V,则须外部另加限流电阻R,保证给驱动器内部光藕提供8—15mA 的驱动电流。
脉冲输入信号通过CP-接入;此时,U/D-,EN-在低电平有效。
2、共阴极接法:分别将CP-,U/D-,EN-连接到控制系统的地端(SGND,与电源地隔离);+5V 的脉冲输入信号通过CP+加入;此时,U/D+,EN+在高电平有效。
限流电阻R 的接法取值与共阳极接法相同。
注:EN端可不接,EN有效时电机转子处于自由状态(脱机状态),这时可以手动转动电机转轴,做适合您的调节。
手动调节完成后,再将EN设为无效状态,以继续自动控制。
细分数设定细分数是以驱动板上的拨盘开关选择设定的,根据细分选择表的数据设定(最好在断电情况下设定)。
细分后步进电机步距角按下列方法计算:步距角=电机固有步距角/细分数。
如:一台固有步距角为 3.6°的步进电机在16细分下步距角为 3.6°/16=0.225°驱动板上拨码开关1、2、3分别对应M1、M2、M3。
细分选择详细数据表电流大小设定Io(100%)=VREF*(1/3)*(1/Rs)Rs为NFA(B)外接检测电阻。
四线步进电机的驱动芯片1.引言1.1 概述四线步进电机是一种常见的电动机类型,具有广泛的应用领域。
它通过电流变化控制转子的位置,使得电机可以精确地进行步进运动。
相比其他类型的电机,四线步进电机具有结构简单、体积小、重量轻、响应速度快等特点,因此在自动控制系统、机械设备等方面得到了广泛应用。
在四线步进电机中,驱动芯片起着至关重要的作用。
驱动芯片是将控制信号转换为电流输出的关键部件,它能够提供适当的电流给步进电机,使其产生稳定的运动。
驱动芯片的性能和质量直接影响着整个步进电机系统的运行效果和稳定性。
随着科技的进步和需求的不断增加,驱动芯片在四线步进电机中的重要性也越来越凸显。
一方面,不断提高的需求使得对步进电机的精度和稳定性要求越来越高,这就对驱动芯片的性能提出了更高的要求,需要能够提供更加精确、稳定的控制信号。
另一方面,自动化技术的不断发展也推动了驱动芯片的创新和进步,使其能够更好地适应不同类型步进电机的控制需求。
未来,随着四线步进电机在机器人、自动化设备、医疗器械等领域的广泛应用,驱动芯片将继续发挥重要作用。
预计驱动芯片将朝着更高的集成度、更低的功耗和更高的精度方向发展。
同时,随着人工智能、物联网等技术的不断推进,驱动芯片可能会融入更多的智能化特性,提供更多样化、灵活性更强的控制方式,以满足不同领域对于步进电机驱动的需求。
总的来说,四线步进电机的驱动芯片在整个步进电机系统中具有重要的地位和作用。
其性能的提升和创新将不断促进步进电机的发展和应用,并推动自动化技术的进一步进步。
文章结构部分的内容可以按照以下方式编写:1.2 文章结构本文将按照以下结构进行叙述和讨论:第一部分是引言部分,首先对四线步进电机的驱动芯片进行一个简单的概述,介绍其基本工作原理和主要特点。
然后对整篇文章的结构进行说明,包括各部分的内容和组织方式。
最后明确论文的目的,即探讨驱动芯片在四线步进电机中的重要性和未来的发展方向。
第二部分是正文部分,主要分为两个小节。
THB6064单轴步进电机驱动器说明驱动板性能参数概述:1.信号输入:采用光电隔离器件,直接采用单脉冲和方向信号译码控制模;有CP、DIR、EN,分别为步进脉冲输入、方向信号输入、脱机信号输入;2.驱动电流0.5A~4.2A可调;3.电流衰减模式可调;4.两相正弦细分步进电机驱动,细分1/2,1/8,1/10,1/16,1/20,1/32,1/40,1/64可调;5.电压输入:功率电压DC24~42V,逻辑电压:DC5V;6.可实现正反转控制;7.有复位功能;8.自动半流控制9.芯片内部有过热保护(TSD)和过流检测电路,过热过流有红色LED灯报警。
10.红色LED灯为工作异常报警灯,绿色LED灯为电源指示灯。
一、引脚说明输入:CP+/CP-为脉冲信号输入脚DIR+/DIR-为方向控制信号EN+/EN-为脱机控制信号输出:A+/A-:电机A相绕组B+/B-:电机B相绕组电源:VCC:驱动电源(VM≤42V)GND:电源地二、接线说明:输入信号接口有两种接法:用户可根据需要采用共阳极接法或共阴极接法。
1、共阳极接法:分别将CP+,DIR+,EN+连接到控制系统的电源上,如果此电源是+5V则可直接接入,如果此电源大于+5V,则须外部另加限流电阻R,保证给驱动器内部光藕提供8—15mA的驱动电流。
脉冲输入信号通过CP-接入;此时,DIR-,EN-在低电平有效。
2、共阴极接法:分别将CP-,DIR-,EN-连接到控制系统的地端(SGND,与电源地隔离);+5V的脉冲输入信号通过CP+加入;此时,DIR+,EN+在高电平有效。
限流电阻R的接法取值与共阳极接法相同。
注:EN端可不接,EN有效时电机转子处于自由状态(脱机状态),这时可以手动转动电机转轴,做适合您的调节。
手动调节完成后,再将EN设为无效状态,以继续自动控制。
三、细分选择细分由三位拨码开关设置的,共有8种细分选择,拨码开关标注的1、2、3分别对应M1、M2、M3。

【简要说明】【标注图片】拨码开关作用:机细分设定:(拨码开关常态均为低电平,接通为高电平。
)【原理图】#include<reg52.h>#define uchar unsigned char#define uint unsigned int/********************************************************控制位定义********************************************************/ sbit IN1=P3^2; // 输入1sbit IN2=P3^3; // 输入2sbit shi_neng=P3^7; // 使能控制位sbit fang_xiang=P3^5;// 旋转方向控制位sbit mai_chong=P3^4; // 脉冲控制位sbit K1= P1^0; // 启动按键sbit K2= P1^1; // 正转选择sbit K3= P1^2; // 正转选择sbit K4= P1^3; // 反转选择sbit out1= P1^4; // 正转选择sbit out2= P1^5; // 反转选择uint y=2; //设定转动脉冲数值bit bz1=0;bit bz2=0;bit bz3=0;bit bz4=0;bit bz5=0;bit bz6=0;/********************************************************************初始定义*********************************************************************/ uint sec=800; //定义计数值uint tcnt; //键值判断uint sec1;/********************************************************延时函数********************************************************/void delay(uint i)//延时函数{uchar j,k;for(j=0;j<i;j++)for(k=0;k<250;k++);}/******************************************************************** 定时器初始化函数*********************************************************************/ void initTimer(void){TMOD=0x2;TH0=0xf6;TL0=0xf6;}/********************************************************主函数********************************************************/main(){initTimer();TR0=0;ET0=1;EA=1;shi_neng=1; // 使能控制位fang_xiang=1;// 旋转方向控制位mai_chong=1; // 脉冲控制位while(1){if((K1==0)&&(bz1==0)){delay(100);if(K1==0){bz1=1;shi_neng=0;TR0=1;tcnt=0;}} if((K1==1)&&(bz1==1)){delay(100);if(K1==1){bz1=0;}} //启动if((K2==0)&&(bz2==0)){delay(100);if(K2==0){bz2=1;shi_neng=1;TR0=0;}}if((K2==1)&&(bz2==1)){delay(100);if(K2==1){bz2=0;}} //停止if((K3==0)&&(bz3==0)){delay(100);if(K3==0){bz3=1;fang_xiang=0;}}if((K3==1)&&(bz3==1)){delay(100);if(K3==1){bz3=0;}} //启动if((K4==0)&&(bz4==0)){delay(100);if(K4==0){bz4=1;fang_xiang=1;}}if((K4==1)&&(bz4==1)){delay(100);if(K4==1){bz4=0;}} //停止if((IN1==0)&&(bz5==0)){delay(100);if(IN1==0){bz5=1;out1=0;}}if((IN1==1)&&(bz5==1)){delay(100);if(IN1==1){bz5=0;out1=1;}} //第1路点动输出if((IN2==0)&&(bz6==0)){delay(100);if(IN2==0){bz6=1;out2=0;}}if((IN2==1)&&(bz6==1)){delay(100);if(IN2==1){bz6=0;out2=1;}} //第2路点动输出}}/********************************************************************定时中断服务函数*********************************************************************/ void t0(void) interrupt 1 using 0 //定时中断服务函数{tcnt++; //每过250ust tcnt 加一if(tcnt==100) //设定速度{tcnt=0; //重新再计// sec--;// if(sec==0){TR0=0;shi_neng=0;}mai_chong=!mai_chong;}}/********************************************************************结束*********************************************************************/ 【PCB图】【图片展示】。
THB6064芯片的问题汇总1.芯片的最高电压为50V(空载状态下),电机在运行时会产生的感应电动势,电感越大、速度越快产生的电动势越大。
所以在选择电源时,需要把这考虑进去,推荐最高使用42v以下电源。
一般应用场合,选择9、36V即可。
2.芯片功率桥部分使用mos管,内部己寄生快速二极管,一般小电流场合应用可不外接续流管。
电流若是大于3 A时建议加上,以降低芯片的功耗,并建议用肖特基二极管作为续流管,肖特基二极管最大的好处是门限电压低。
3.THB6064H的电流衰减方式有三种模式,Vfdt<0. 8M时为快衰减,1. IV<Vfdt<3. IV时为混合衰减,4.5V<Vfdt时为慢衰减。
具体调整方式:先为3、23脚osc 选好2个电容(建议选择470pF),再调整PDT 电压(建议设定2M以下),由低向高调,以电机运行平稳,噪音低、震动小时为佳。
THB6064AH 的电流衰减有4种混合衰减模式,分别是20%快衰减,(在一个衰减周期内,20%为快衰减模式, 80%为慢衰减模式),40%、60%,80%快衰减模式。
具体调整方式:先为23脚Rosc选好1个电阻(建议选择51KQ),调整这4个状态以电机运行平稳,噪音低、震动小时为佳。
5.在四个电机输出端与地之间需接入电阻Rx,阻值视供电电压而定,VM/Rx在5mA左右即可。
作用是抑制感应毛刺电压对芯片的损坏。
四个负载电阻建议最小用0805以上封装。
6.THB6064H检测电阻最好选用0 · 25 0以上,以保证最佳驱动效果。
THB6064AH检测电阻最好选用0· 2 Q以上,以保证最佳驱动效果。
7.在设计PCB时,要注意芯片周围的安全间距至少要15mi以0 · 381mm),在四个电机输出端和电源端尤其需要注意。
8.设计PCB时要注意保证芯片的三个接地脚要最短化直接连接(线宽不小于Imm),然后与检测电阻接地端就近连接,再一起引出。