LXM调试软件Somove使用说明
- 格式:docx
- 大小:78.73 KB
- 文档页数:5

Confidential – Internal use onlyOEM 市场部 运动与驱动产品管理部 发送至:A U TB U : I N F O R M A T I O N N O T ENo : 20151001 Date: 2015-05-11Author : 侍钧 / OEM Marketing Product EngineerConfidential – Internal use only★主题 LXM32M 识别第三方电机Hiperface 编码器的配置及说明★内容1. LXM32M 大功率驱动器及附件型号说明2. PHASE 电机的配置及说明3. 登奇电机的配置及说明★背景信息LXM32M 大功率驱动在加线路电抗器和EMC 滤波器的情况下,功率最大可以达到22KW 。
针对大功率设备的工艺要求,我们可以配合第三方电机电机,实现22KW 以内解决方案。
★内容提要介绍了LXM32M 识别带Hiperface 编码器第三方电机的应用步骤以及相关参数配置、故障说明。
Confidential – Internal use only1.LXM32M 及附件型号 说明驱动型号:LXM32MD85N4 LXM32MC10N4附件型号:进线电抗器:VW3A4554(LXM32MD85N4)VW3A4555(LXM32MC10N4 ) EMC 滤波器:VW3A4424可匹配的电机型号:BMH190 xxx / BMH205 xxx驱动器基本参数:加进线电抗器和EMC 滤波器情况下,功率最大可达22kW ;不加进线电抗器情况下,功率最大可达11kW可与BMH190 和BMH205 电机相连,最大功率为9kW 。
若功率要求大于9kW ,则需带第三方电机(如 PHASE 电机)所需附件: 进线电抗器(VW3A4554/ VW3A4555),制动电阻(根据实际应用),EMC 滤波器 (VW3A4424)在9KW 以上,最大到22KW 的应用,我们可以选择选择第三方电机来满足客户的工艺要求,提供我们的解决方案。

XMOVE3.0手持终端——软件介绍:精简型嵌入式管理系统的菜单实现和任务切换一. 综述和废话本系统是我的XMOVE动作感应系统框架的嵌入式实现部分。
一提到OS一般都会被人喷。
OS是何等庞大的东西,区区小辈凭什么敢把自己的几百行代码称之为OS?叫做框架都不行!有句话叫简单就是美。
方便移植,使用简单的c语言框架,在单片机上再合适不过了。
想象一下,一个嵌入式手持系统,在2KB内存的单片机上实现,硬件上有按键和图形界面,软件上有简单的任务调度和中断服务策略,一个还不错的菜单管理和用户GUI,输入输出接口和简单的无线通信协议,有小游戏,甚至还能听MP3,甚至还有中文输入法。
给你这样的系统,你还想要什么?所以我们称之为嵌入式管理系统,目前在430和STM32上成功移植和运行,可以支持不同颜色和分辨率的显示器,我会专门用一篇文章介绍其GUI实现。
但目前我仅介绍其中的一部分:在嵌入式系统中如何实现简单的菜单和任务切换功能。
与XMOVE手持终端相关的介绍文章列表如下:硬件综述: 自制的彩屏手持动作感应终端软件综述:手持终端功能介绍软件介绍(一):精简型嵌入式系统的菜单实现和任务切换软件介绍(二):在2KB内存单片机上实现的彩屏GUI控件库软件介绍(三):在2KB内存单片机上实现的俄罗斯方块软件介绍(四):在2KB内存单片机上实现的超精简五子棋算法软件介绍(五):在2KB内存的单片机上实现的T9中文输入法下面是系统实际运行图这是该系统的12864单色屏版本12864单色屏版本主菜单——四宫格320*240彩屏版本,菜单提供了三种风格和不同的配色,可以在系统设置中调节二. 系统总体框架系统面向对实时性没有极端要求的应用,针对平台是内存10KB以内的嵌入式芯片,通常包含小型LCD屏幕和键盘的工控系统,通常系统会实现一些菜单和任务调度。
为实现这个目标,搭建系统框架是非常必要的。
必须满足以下几类要求:(1)可移植性,主控芯片和外围模块可变,满足硬件无关性。

SoMachine编程指南SoMachine是施耐德电气公司推出的一款多功能自动化软件平台,可用于编程多种自动化设备,包括可编程逻辑控制器(PLC),变频器,人机界面等。
本文将为您提供SoMachine编程的指南,帮助您从零开始使用该软件。
2. 创建和配置项目:打开SoMachine软件后,您需要创建一个新的项目。
在“文件”菜单中选择“新建项目”,然后为项目选择一个名称和位置。
接下来,您需要配置项目的属性,包括设备类型、通信设置和硬件配置等。
3. 编写逻辑程序:在SoMachine软件中,您可以使用多种编程语言来编写逻辑程序,包括Ladder Diagram(LD)、Structured Text(ST)、Function Block Diagram(FBD)等。
选择一种您熟悉且适合您的项目的编程语言。
4. 添加设备和功能块:SoMachine允许您通过“设备”菜单来添加不同类型的设备,如PLC、变频器和人机界面等。
根据您的项目需求,选择合适的设备并添加到项目中。
此外,您还可以添加功能块来扩展功能和实现复杂的控制逻辑。
5.配置设备和功能块:一旦添加设备和功能块,您需要进行配置以适应您的应用需求。
在设备属性和功能块属性对话框中,您可以设置通信参数、输入输出点位、报警和故障处理等。
确保所有设备和功能块的配置都正确无误。
6. 调试和测试:在编写完逻辑程序并配置设备之后,您可以使用SoMachine的调试功能来验证程序的正确性。
可以使用在线模拟器进行测试,也可以连接实际设备进行实时调试。
通过观察程序执行过程中的变量值和设备状态,您可以判断程序逻辑是否正确。
8. 文档和备份:在编程过程中,建议您定期对项目进行备份,以防止意外数据丢失。
同时,编写详细的文档和注释,有助于他人理解和维护您的程序。
SoMachine提供了文档生成工具,可以自动生成程序的说明和文档。
9. 学习和掌握SoMachine:SoMachine是一个强大而复杂的软件平台,学习和掌握它需要一定的时间和经验。

M218系统用户手册章节目录第一章 M218系统架构1.1 应用案例1.2 系统架构图1.3 元器件清单第二章 M218控制器经Modbus与HMI的通讯2.1 概述2.2 串行通讯硬件接线图2.3 与HMI通过映射地址的方式通讯2.4 与HMI通过符号表的方式共享变量第三章 M218控制器以太网通讯3.1 概述3.2 内置以太网口硬件接线图3.3 以太网通讯组态步骤3.4 以太网通讯程序实例第四章 通过Modbus通讯控制ATV3034.1 概述4.2 硬件接线图4.3 变频器ATV303通讯参数设置4.4 Modbus通讯组态步骤4.5 通讯程序实例第五章 通过模拟量方式控制ATV3035.1 概述5.2 硬件接线图5.3 变频器ATV303控制方式设置5.4 SoMachine软件中模拟量组态步骤5.5 通讯程序实例第六章 PTO方式控制Lexium23C6.1 概述6.2 硬件接线图6.3 Lexium23C通讯参数设置6.4 SoMachine软件中PTO组态步骤6.5 通讯程序实例第七章 M218控制器HSC7.1 概述7.2 硬件接线图7.3 内置HSC组态步骤7.4 HSC程序实例综述 本章给出了本书中M218系统架构的介绍本章内容1.1应用案例简述 本节中给出一个具体的应用案例,用户可参照案例中相应的元器件设备的配置参考步骤以及程序,编制自己的应用程序.案例描述 某客户开发一套立式间歇式包装机,现选用Schneider Electric 的OEM Solution方案来集成系统,其具体硬件配置要求如下:1)人机接口:选用XBTGT2330;2)PLC: 选用TM238LFDC24DT;3)变频器: 选用ATV303;4)饲服驱动器: 选用Lexium23C;5)编码器: 选用XCC1510PS11Y;1.2系统应用架构网络拓扑图简述 本节中给出了上节应用案例中方案的网络拓扑图,用户可以非常 直观的了解整个方案的架构。
Lexium 26 基础培训教材~220V 含义R 单相或三相220VAC驱动器主电源输入STL1 单相220VAC驱动器控制电源输入L2Motor 含义PE 电机地线U 电机U相V 电机V相W 电机W相Resistor 含义PBe 制动电阻公共端PBi 内部制动电阻PA/+ 外部制动电阻CN2 含义E 电机编码器CN3 含义Modbus 调试及Modbus接口CN1 含义I/O 各数字量/模拟量/脉冲信号输入输出接口CN1 信号含义Mode35 PULL HI_S 开集电极方向信号正P36 /SIGN 线驱动方向信号正P37 SIGN 方向信号负P39 PULL HI_P 开集电极脉冲信号正P43 /PULSE 线驱动脉冲信号正P41 PULSE 脉冲信号负P46 HSIGN 高速脉冲方向信号正P40 /HSIGN 高速脉冲方向信号负P38 HPULSE 高速脉冲脉冲信号正P29 /HPULSE 高速脉冲脉冲信号负P42 V_REF 速度参考模拟电压Vz44 GND 速度参考模拟电压地Vz18 T_REF 扭矩参考模拟电压Tz19 GND 扭矩参考模拟电压地Tz CN1 信号含义Mode 17 VDD 内部24V电源24V+ ALL 45/47/49 COM- 内部24V电源0V ALL 11 COM+ 输入信号公共端ALL09 DI1- 数字输入1 ALL10 DI2- 数字输入2 ALL 34 DI3- 数字输入3 ALL 08 DI4- 数字输入4 ALL 33 DI5- 数字输入5 ALL 32 DI6- 数字输入6 ALL 31 DI7- 数字输入7 ALL 30 DI8- 数字输入8 ALLCN1 信号含义Mode 07 DO1+ 数字输出1正ALL 06 DO1- 数字输出1负ALL 05 DO2+ 数字输出2正ALL 04 DO2- 数字输出2负ALL 03 DO3+ 数字输出3正ALL 02 DO3- 数字输出3负ALL 01 DO4+ 数字输出4正ALL 26 DO4- 数字输出4负ALL 28 DO5+ 数字输出5正ALL 27 DO5- 数字输出5负ALL CN1 信号含义Mode21 OA 模拟编码器输出A ALL22 /OA 模拟编码器输出/A ALL 25 OB 模拟编码器输出B ALL 23 /OB 模拟编码器输出/B ALL 50 OZ 模拟编码器输出Z ALL 24 /OZ 模拟编码器输出/Z ALL2.1PT 模式PT (Pulse Train) Mode -- 脉冲串控制模式(P1-01最后两位设为00): 在PT运行模式中,驱动器与一组主输入端输入的脉冲串同步。

vigoservo说明书产品详细说明一般伺服都有三种控制方式:位置控制方式、转矩控制方式、速度控制方式。
1、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值,由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
2、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现,servo伺服驱动器说明书。
应用主要在对材质的手里有严格要求的缠绕和放卷的装置中,3、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。
位置模式也支持直接负载外环检测位置信号,servo伺服驱动器说明书,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
,servo伺服驱动器说明书。
由于无刷直流电动机是以自控式运行的,所以不会变频调速下重载启动的同步电机那样在转子上另加启动绕组。
在伺服驱动器速度闭环中,电机转子实时速度测量精度对于改善速度环的转速控制动静态特性至关重要。
为寻求测量精度与系统成本的平衡,一般采用增量式光电编码器作为测速传感器,与其对应的常用测速方法为M/T测速法。
M/T测速法虽然具有一定的测量精度和较宽的测量范围,但这种方法有其固有的缺陷,主要包括:1)测速周期内必须检测到至少一个完整的码盘脉冲,限制了比较低可测转速;2)用于测速的2个控制系统定时器开关难以严格保持同步,在速度变化较大的测量场合中无法保证测速精度。
因此应用该测速法的传统速度环设计方案难以提高伺服驱动器速度跟随与控制性能伺服驱动器和控制器当前交流伺服驱动器设计中普遍采用基于矢量控制的电流、速度、位置3闭环控制算法。

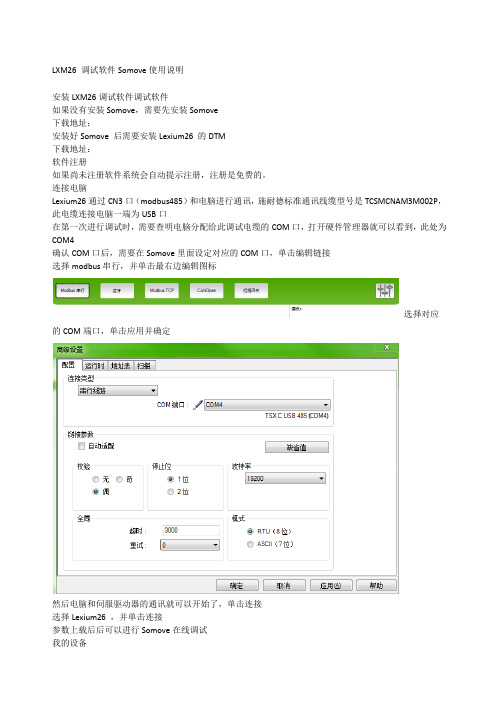
LXM26 调试软件Somove使用说明安装LXM26调试软件调试软件如果没有安装Somove,需要先安装Somove下载地址:.schneider-electric./download/WW/EN/results/3541958-SoftwareFirmware/1555898-Softw are--Released/?showAsIframe=true安装好Somove 后需要安装Lexium26 的DTM下载地址:软件注册如果尚未注册软件系统会自动提示注册,注册是免费的。
连接电脑Lexium26通过CN3口(modbus485)和电脑进行通讯,施耐德标准通讯线缆型号是TCSMCNAM3M002P,此电缆连接电脑一端为USB口在第一次进行调试时,需要查明电脑分配给此调试电缆的COM口,打开硬件管理器就可以看到,此处为COM4确认COM口后,需要在Somove里面设定对应的COM口,单击编辑选择modbus串行,并单击最右边编辑图标选择对应的COM端口,单击应用并确定然后电脑和伺服驱动器的通讯就可以开始了,单击连接选择Lexium26 ,并单击连接参数上载后后可以进行Somove在线调试我的设备用途:我的设备页面用于显示伺服驱动器和电机的基本信息,包括➢驱动器型号➢驱动器序列号➢驱动器固件版本➢电机型号➢驱动器额定/峰值电流➢电机额定/峰值转速➢电机额定/峰值扭矩…参数列表用于:参数列表页面用于设置驱动器P参数,可以按照P参数组开设置,也可以按照操作模式来设置。
相关参数说明可以在Lexium26手册第九章查询用途:错误存界面用来查看伺服的故障历史,可以显示当前故障,已经5次历史故障,并且指明故障原因和处理方式。
可视化用途:可视化界面用于显示以下信号的状态或者数值➢数字输出/输出➢模拟量输入/输出➢指定参数的数值指定参数显示需要1.选定要显示的参数2.在右侧区域用鼠标选择显示区域用途:可同时捕捉驱动器部的最多4个变量,例如电流、电压、位置误差、实际速度等,并绘制成以时间为横坐标的曲线图,以此观察驱动器及电机的运行性能是否符合要求,并相应的做出控制环参数调整。
施耐德Lexium32伺服驱动器调试作业指导书目录1.概况 (3)2.集成的HMI (3)2.1HMI显示和操作 (4)2.2HMI参数设置 (5)3.SoMove软件调试 (5)3.1软件安装及注册 (5)3.2软件连接及界面 (12)3.3主要参数设置 (14)4.运行模式调试 (18)4.1控制方式选择 (19)4.2启动运行模式 (20)4.3Profile Position(点到点)模式 (20)4.4Homing(回零)模式 (22)1.概况本作业指导书以施耐德LXM32M型伺服驱动控制器的调试为例,该伺服驱动器本体支持Modbus串口通讯,同时可选CANopen、DeviceNet、以太网/IP、PROFIBUS DP及EtherCAT通讯插件,采用多圈绝对值型编码器(131072点/圈x4096圈)。
LXM32M控制器可选插件1:PROFIBUS DP可选插件2:CANopen插件伺服驱动器的调试可通过多种方式,如:集成人机界面(HMI)、SoMove设置软件调试。
本文对集成人机界面(HMI)的操作进行简单说明,由于SoMove 是在PC上使用的具有友好界面的设置软件,本作业指导书主要针对通过SoMove 软件对Lexium32伺服驱动器配置和调试方法进行说明,调试准备USB/RJ45电缆数据连接线:用于将一PC连接至设备此电缆为2.5m长,有一个USB连接器(PC端)和一个RJ45连接器(设备端)。
带Microsoft Windows7或Windows8.132/64位操作系统的计算机一套安装、配线就绪具备调试条件的LXM32M伺服控制系统2.集成的HMI可通过集成的HMI(人机界面)对伺服控制器进行设定参数和起动运行模式Jog的调整。
同样可以显示诊断结果(如参数值或故障代码)。
可以通过集成的HMI或者必须使用调试软件来实现某个功能的提示。
1)状态LED2)7段显示器3)按键ESC4)导航按钮2.1HMI显示和操作(一)显示窗口(1)7段显示屏的上方是四个状态LED故障:红灯亮起运行状态故障编辑:黄灯亮起可以编辑的参数值数值:黄灯亮起参数值单位:黄灯亮起选定参数的单位(2)用于识别菜单级别的三个状态LEDLED含义Op操作(Operation)Mon监测(Monitoring)Conf设置(Configuration)(3)出现报警时LED会闪烁,例如超过极限值时。

附件一MOVE软件总体介绍及模块清单说明1.1软件总体介绍Move提供了用于构造模拟和分析的先进方法,是目前市场上可用到的完善的构造模拟工具,从软件研发开始至今已有25年的历史,MOVE一直致力于构造模拟方法的研究和软件研发,以满足勘探和开发对解决构造问题的不断变化的需求。
目前,该软件最新版本MOVE2009可在Windows、Linux操作系统下运行。
在Move中,独特的可约束构造静态构造建模工具,以及对“最佳条件”下的确定性模型和过程模型(裂缝预测、流体流动模拟和浊积流模拟)的运动学分析,帮助用户得到最佳的地质问题解决方案。
在用确定性模拟方式进行裂缝预测,油气运移及沉积分析时,对不同地质条件提供相对应的结果,并可对各种不确定性的结果进行对比分析。
构造发育史分析和建立运动学模型,是地质家用来验证地震解释方案合理性和检测地震解释精度的有力工具。
Move是目前功能最完备的构造模拟软件,它提供了一系列工具,通过地质几何学和地质力学,帮助用户进行运动学分析。
对于油气田的勘探/开发过程中遇到地质构造问题和不确定性因素,MOVE提供了完美的地质模型、丰富的分析工具,来更好的理解地质体系,减少钻探中的技术不确定性,降低决策风险。
MOVE软件的主要特点:1.MOVE是一个用分析法创建不同地质历史时期有效、平衡模型的强有力软件工具。
在恢复时可以综合埋藏史以及考虑地震信息,为地质家及管理者发展地质概念,为解释中的不确定性提供帮助。
2.操作简单,容易学习,应用灵活,无论是否在办公室,都可以快速有效的使用笔记本电脑或工作站上的软件进行工作。
3.在项目实施过程中,可以根据新数据来方便的更新剖面及平面的井数据。
4.使用电影动画和三维可视化方式方便、清晰地对地质家的思想及构造的动态演化过程进行交流。
5.具有先进的平、剖面交互功能,并支持同一位置多条二维剖面代表不同地质家的解释方案。
6.丰富多样的井及倾角投影,包括自动投影及根据新的数据自动修改多条剖面的相应信息7.恢复和正演模拟都是完全运动学的算法,同事考虑去压实及局部或挠曲均衡,压实历史分析。
微波调试软件使用说明D O C N O.:M A001VER:5.0.0.02007-11目录一、系统构成 (3)二、安装与卸载 (3)三、图示方法 (3)1、红点 (3)2、绿点 (3)3、蓝点 (4)4、坐标 (4)四、操作说明 (4)1、SYSTEM(系统) (4)2、DATA(数据) (5)3、PARAMETER SET(参数设置) (5)4、OPERATION(操作) (6)5、INFORMATION(工程信息) (8)五、调试方法 (9)A、数据显示部分 (9)B、参数设置部分 (10)C、调试过程 (11)一、系统构成系统由一个EXE文件构成,打开系统时会自动建立Log和Project目录。
Log用于保存日志时的默认路径,Project用于保存工程文件时的默认路径。
系统同时支持整体式和分体式的微波调试。
二、安装与卸载本系统不需要安装,是绿色软件,直接复制MWAnalyzer.exe即可。
卸载时直接删除MWAnalyzer.exe和自动生成的Log和Project目录即可。
三、图示方法1、红点红点是按F的当前值为横坐标,U的当前值为纵坐标画出的点,“”表示最近一次红点的位置。
2、绿点绿点是按F的平均值(30次)为横坐标,U的平均值(30次)为纵坐标画出的点,“”表示最近一次绿点的位置。
只有当F的当前值与平均值之差小于5时才打印出绿点。
3、蓝点在画板上单击左键即可,同时会把当前的坐标显示到OPERATION中的X,Y中。
也可以输入X,Y的值,点击画蓝点。
4、坐标坐标是按F、U的真实值显示出来,默认的坐标范围是F:0430H-082FH,U:0640H-0A40H,如果显示的坐标不在此范围内时时,请单击按钮,系统自动按当前的F和U的值为中心点输入到中,你也可以手动输入此值。
设定好中心点的值以后,单击按钮确认以后,系统即会重新设定起始坐标。
鼠标右键可以在当前位置上显示坐标虚线,便于查看坐标。

LXM26 调试软件Somove使用说明安装LXM26调试软件调试软件如果没有安装Somove,需要先安装Somove下载地址:/download/WW/EN/results/3541958-SoftwareFirmware/155 5898-Software--Released/?showAsIframe=true安装好Somove 后需要安装Lexium26 的DTM下载地址:软件注册如果尚未注册软件系统会自动提示注册,注册是免费的。
连接电脑Lexium26通过CN3口(modbus485)和电脑进行通讯,施耐德标准通讯线缆型号是TCSMCNAM3M002P,此电缆连接电脑一端为USB口在第一次进行调试时,需要查明电脑分配给此调试电缆的COM口,打开硬件管理器就可以看到,此处为COM4确认COM口后,需要在Somove里面设定对应的COM口,单击编辑链接选择modbus串行,并单击最右边编辑图标选择对应的COM端口,单击应用并确定然后电脑和伺服驱动器的通讯就可以开始了,单击连接选择Lexium26 ,并单击连接参数上载后后可以进行Somove在线调试我的设备用途:我的设备页面用于显示伺服驱动器和电机的基本信息,包括➢驱动器型号➢驱动器序列号➢驱动器固件版本➢电机型号➢驱动器额定/峰值电流➢电机额定/峰值转速➢电机额定/峰值扭矩…参数列表用于:参数列表页面用于设置驱动器P参数,可以按照P参数组开设置,也可以按照操作模式来设置。
相关参数说明可以在Lexium26手册第九章查询错误内存用途:错误内存界面用来查看伺服的故障历史,可以显示当前故障,已经5次历史故障,并且指明故障原因和处理方式。
可视化用途:可视化界面用于显示以下信号的状态或者数值➢数字输出/输出➢模拟量输入/输出➢指定参数的数值指定参数显示需要1.选定要显示的参数2.在右侧区域用鼠标选择显示区域示波器用途:可同时捕捉驱动器内部的最多4个变量,例如电流、电压、位置误差、实际速度等,并绘制成以时间为横坐标的曲线图,以此观察驱动器及电机的运行性能是否符合要求,并相应的做出控制环参数调整。
L M调试软件S o m o v e使用说明精编Document number:WTT-LKK-GBB-08921-EIGG-22986LXM26 调试软件Somove使用说明安装LXM26调试软件调试软件如果没有安装Somove,需要先安装Somove下载地址:安装好Somove 后需要安装Lexium26 的DTM下载地址:软件注册如果尚未注册软件系统会自动提示注册,注册是免费的。
连接电脑Lexium26通过CN3口(modbus485)和电脑进行通讯,施耐德标准通讯线缆型号是TCSMCNAM3M002P,此电缆连接电脑一端为USB口在第一次进行调试时,需要查明电脑分配给此调试电缆的COM口,打开硬件管理器就可以看到,此处为COM4确认COM口后,需要在Somove里面设定对应的COM口,单击编辑链接选择modbus串行,并单击最右边编辑图标选择对应的COM端口,单击应用并确定然后电脑和伺服驱动器的通讯就可以开始了,单击连接选择Lexium26 ,并单击连接参数上载后后可以进行Somove在线调试我的设备用途:我的设备页面用于显示伺服驱动器和电机的基本信息,包括驱动器型号驱动器序列号驱动器固件版本电机型号驱动器额定/峰值电流电机额定/峰值转速电机额定/峰值扭矩…参数列表用于:参数列表页面用于设置驱动器P参数,可以按照P 参数组开设置,也可以按照操作模式来设置。
相关参数说明可以在Lexium26手册第九章查询错误内存用途:错误内存界面用来查看伺服的故障历史,可以显示当前故障,已经5次历史故障,并且指明故障原因和处理方式。
用途:可视化界面用于显示以下信号的状态或者数值数字输出/输出模拟量输入/输出指定参数的数值指定参数显示需要1.选定要显示的参数2.在右侧区域用鼠标选择显示区域用途:可同时捕捉驱动器内部的最多4个变量,例如电流、电压、位置误差、实际速度等,并绘制成以时间为横坐标的曲线图,以此观察驱动器及电机的运行性能是否符合要求,并相应的做出控制环参数调整。


SoMove 软件简单使用
1.联机
打开软件点击Connect 会自动扫描,如果没有扫到,点击Configure,设置连接方式及相关设置
点击Configure, 选择Modbus Monodrop Connection.
然后点击Advanced 设置
设置好以后点击Test 测试连接
2.上传参数
一般正常连接后,按Alt + F会自动从变频器读取参数
参数读取完成后,点击Disconnect from Device,断开连接
点击Load from Device 按钮上传变频器内的参数
3.保存参数
点击File—Save as 将参数保存到指定的目录下
4.打开存在的参数
点击Open a project 选择需要的参数
5.下载参数
打开需要的参数后,点击Store to Device 将参数下载到变频器中(千万不要点击连接变频器,否则会自动从变频器中读取参数,并将已经打开的参数覆盖掉)。

LXM26 调试软件Somove使用说明安装LXM26调试软件调试软件如果没有安装Somove,需要先安装Somove下载地址:/download/WW/EN/results/3541958-SoftwareFirmware/155 5898-Software--Released/?showAsIframe=true安装好Somove 后需要安装Lexium26 的DTM下载地址:软件注册如果尚未注册软件系统会自动提示注册,注册是免费的。
连接电脑Lexium26通过CN3口(modbus485)和电脑进行通讯,施耐德标准通讯线缆型号是TCSMCNAM3M002P,此电缆连接电脑一端为USB口在第一次进行调试时,需要查明电脑分配给此调试电缆的COM口,打开硬件管理器就可以看到,此处为COM4确认COM口后,需要在Somove里面设定对应的COM口,单击编辑链接选择modbus串行,并单击最右边编辑图标选择对应的COM端口,单击应用并确定然后电脑和伺服驱动器的通讯就可以开始了,单击连接选择Lexium26 ,并单击连接参数上载后后可以进行Somove在线调试我的设备用途:我的设备页面用于显示伺服驱动器和电机的基本信息,包括➢驱动器型号➢驱动器序列号➢驱动器固件版本➢电机型号➢驱动器额定/峰值电流➢电机额定/峰值转速➢电机额定/峰值扭矩…参数列表用于:参数列表页面用于设置驱动器P参数,可以按照P参数组开设置,也可以按照操作模式来设置。
相关参数说明可以在Lexium26手册第九章查询错误内存用途:错误内存界面用来查看伺服的故障历史,可以显示当前故障,已经5次历史故障,并且指明故障原因和处理方式。
可视化用途:可视化界面用于显示以下信号的状态或者数值➢数字输出/输出➢模拟量输入/输出➢指定参数的数值指定参数显示需要1.选定要显示的参数2.在右侧区域用鼠标选择显示区域示波器用途:可同时捕捉驱动器内部的最多4个变量,例如电流、电压、位置误差、实际速度等,并绘制成以时间为横坐标的曲线图,以此观察驱动器及电机的运行性能是否符合要求,并相应的做出控制环参数调整。
Lexium28 调试软件Somove使用说明ContentsLexium28 调试软件Somove使用说明 (1)安装Lexium28调试软件调试软件 (2)软件注册 (2)连接电脑 (4)我的设备 (7)参数列表 (8)错误内存 (9)可视化 (9)示波器 (10)调试 (16)控制栏和状态栏 (16)整定 (16)我的仪表板 (18)本文档作为Lexium28 Somove调试使用的补充说明,所有安全信息,免责声明请参考:Somove软件帮助文档Lexium28 DTM online helpLexium28产品手册此处不再累述版本信息V2015.11.13 首次发布安装Lexium28调试软件调试软件如果没有安装Somove,需要先安装Somove安装好Somove 后需要安装Lexium28 的DTM软件注册如果尚未注册软件系统会自动提示注册,注册是免费的。
连接电脑Lexium28通过CN3口(modbus485)和电脑进行通讯,施耐德标准通讯线缆型号是TCSMCNAM3M002P,此电缆连接电脑一端为USB口在第一次进行调试时,需要查明电脑分配给此调试电缆的COM口,打开硬件管理器就可以看到,此处为COM4确认COM口后,需要在Somove里面设定对应的COM口,单击编辑链接选择modbus串行,并单击最右边编辑图标选择对应的COM端口,单击应用并确定然后电脑和伺服驱动器的通讯就可以开始了,单击连接选择Lexium28 ,并单击连接参数上载后后可以进行Somove在线调试我的设备用途:我的设备页面用于显示伺服驱动器和电机的基本信息,包括驱动器型号驱动器序列号驱动器固件版本电机型号驱动器额定/峰值电流电机额定/峰值转速电机额定/峰值扭矩…参数列表用于:参数列表页面用于设置驱动器P参数,可以按照P参数组开设置,也可以按照操作模式来设置。
相关参数说明可以在Lexium28手册第九章查询错误内存用途:错误内存界面用来查看伺服的故障历史,可以显示当前故障,已经5次历史故障,并且指明故障原因和处理方式。
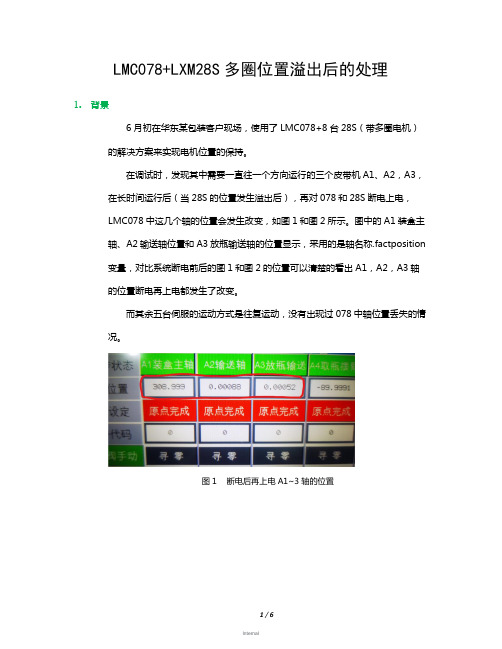
LMC078+LXM28S多圈位置溢出后的处理1.背景6月初在华东某包装客户现场,使用了LMC078+8台28S(带多圈电机)的解决方案来实现电机位置的保持。
在调试时,发现其中需要一直往一个方向运行的三个皮带机A1、A2,A3,在长时间运行后(当28S的位置发生溢出后),再对078和28S断电上电,LMC078中这几个轴的位置会发生改变,如图1和图2所示。
图中的A1装盒主轴、A2输送轴位置和A3放瓶输送轴的位置显示,采用的是轴名称.factposition 变量,对比系统断电前后的图1和图2的位置可以清楚的看出A1,A2,A3轴的位置断电再上电都发生了改变。
而其余五台伺服的运动方式是往复运动,没有出现过078中轴位置丢失的情况。
图1 断电后再上电A1~3轴的位置图2 A1~A3轴断电前,后位置对比这个客户现场发现的问题我在16号的张江实验室进行了复现和确认,如图3所示。
图3 张江实验复现上电前后位置变化2.LMC078和28S的固件版本LMC078 1.5.1.5,28S的固件测试2.75.25和2.78.3两个版本。
3.SoMove调试软件和DTM版本使用SoMove软件2.8.4+V1.6.12版本的DTM文件进行产品的调试。
4.Lexiumstudio 调试软件版本使用lexium studio V1.15.0,主要用于检查伺服驱动器和电机。
5.SoMove检查A1~A3轴断电前后的位置使用SoMove检查驱动器断电前后A1~A3的位置的改变动量非常小,A1轴断电前后的位置如图4所示。
图4 A1断开前后28S编码器位置的对比A2和A3轴的位置变化量也很小,位置的变化都在合理的范围内,说明28S 的位置信息在断电后并没有丢失。
6.LMC078轴位置丢失的原因和解决方案1)原因在客户现场发现只有A1~A3轴一直往一个方向运行的轴会发生溢出的现象,而A4~A7往复运行轴并没有问题,可以确定此问题是因为28S的位置发生溢出但LMC078没有对LXM28S的轴位置进行补偿导致的。
L X M26调试软件S o m o v e使用说明安装LXM26调试软件调试软件
如果没有安装Somove,需要先安装Somove
下载地址:
安装好Somove 后需要安装Lexium26 的DTM
下载地址:
软件注册
如果尚未注册软件系统会自动提示注册,注册是免费的。
连接电脑
Lexium26通过CN3口(modbus485)和电脑进行通讯,施耐德标准通讯线缆型号是TCSMCNAM3M002P,此电缆连接电脑一端为USB口
在第一次进行调试时,需要查明电脑分配给此调试电缆的COM口,打开硬件管理器就可以看到,此处为COM4
确认COM口后,需要在Somove里面设定对应的COM口,单击编辑链接
选择modbus串行,并单击最右边编辑图标
选择对应的COM端口,单击应用并确定
然后电脑和伺服驱动器的通讯就可以开始了,单击连接
选择Lexium26 ,并单击连接
参数上载后后可以进行Somove在线调试
我的设备
用途:我的设备页面用于显示伺服驱动器和电机的基本信息,包括
驱动器型号
驱动器序列号
驱动器固件版本
电机型号
驱动器额定/峰值电流
电机额定/峰值转速
电机额定/峰值扭矩
…
参数列表
用于:参数列表页面用于设置驱动器P参数,可以按照P参数组开设置,也可以按照操作模式来设置。
相关参数说明可以在Lexium26手册第九章查询
错误内存
用途:错误内存界面用来查看伺服的故障历史,可以显示当前故障,已经5次历史故障,并且指明故障原因和处理方式。
可视化
用途:可视化界面用于显示以下信号的状态或者数值
数字输出/输出
模拟量输入/输出
指定参数的数值
指定参数显示需要
1.选定要显示的参数
2.在右侧区域用鼠标选择显示区域
示波器
用途:可同时捕捉驱动器内部的最多4个变量,例如电流、电压、位置误差、实际速度等,并绘制成以时间为横坐标的曲线图,以此观察驱动器及电机的运行性能是否符合要求,并相应的做出控制环参数调整。
左侧三个输入区域分别用于:
Channels:选择希望监视的参数
Trigger:选择开始捕捉参数的触发条件
Settings:选择需要做出调整的控制环参数
这三个输入区域可以分别用右侧示波器栏顶部的三个按钮打开
这是右侧示波器栏顶部的一排按钮,它们的功能是这样的:
:用于打开和关闭左侧三个输入区域
:用于加载和保存捕捉到的波形文件
:用于导出和导入示波器的配置文件
:分别用于给波形曲线加注释,将波形拷贝为图形文件(*.png),设置FFT功能的采样参数
:用于对波形进行放大、缩小、移动
:分别用于在波形上加两个光标以准确读出光标点的数值,在示波器上显示波形名称样例,对波形进行FFT转换观察频域分布
示波器的一般使用顺序为:
1.在左边第一个输入区域中选择希望捕捉的参数:
1)按打开可以捕捉的参数列表,示波器同时最多捕捉4个参数
其中可捕捉的参数都在列表的RAM栏目内
按可以单独更改希望捕捉的参数
按可以删除不想捕捉的参数
2)选择好参数后要设置参数的采样条件,按Sampling打开下拉列表,
可以设置参数的采样点数和采样时间间隔。
它们决定了整个采集时间段的长度以及转换到频域显示时的最高频率。
2.在左边第二个输入区域中选择触发条件
示波器不能连续采集数据,它只能采集从某个触发条件开始后一定时间内的数据。
这个条件可以是某个参数值达到预设数值,例如电机指令速度大于5rpm时开始采集数据。
1)首先选择触发模式是普通模式还是专家模式。
普通模式仅能选择触发条件是哪个参数,专家模式可以设置更多条件,例如多捕捉触发点时刻之前的一些数据,以保证图形的完整度。
一般建议使用专家模式。
2)按打开可以设置为条件的参数列表:
其中可设置为触发条件的参数都在列表的RAM栏目内
按可以单独更改设置为条件的参数
按可以删除触发条件参数
3)在专家设置页面中,以电机收到的指令速度为例:
Delay栏中可以设置数据保存开始时间,在触发点时刻往前后往后若干个采样周期。
一般常用为正数个SamplingRate,这样可以在多采集触发点之前的数据,保持波形的完整性。
Type栏中可以设置触发条件是参数值增大到超过预设值或者减小到小于预设值,例如说此处选择GrowingEdge,表示当指令速度增加到超过预设值时为采集触发点
LevelH则是设置预设值
此处综合看,触发条件为:当电机收到的指令转速增加到超过10rpm时刻的前5个采样时间周期,开始采样数据。
3.在左边第三个输入栏中选择希望直接更改的控制环参数。
这里实际上是把参数列表中的驱动器
参数列了出来,方便直接更改而不用切换到参数列表栏。
1)按打开可以更改的参数列表:
其中可更改的驱动器参数都在列表的EEPROM栏目内
按可以单独更改选择的驱动器参数
按可以删除选择的驱动器参数
2)选择出的参数会列在输入区域内,可以直接更改参数名后面的数值
4.在设置好示波器之后,按右边示波器栏上方中的绿色三角按
钮,等待后方Stopped显示为,表示示波器已经准备完毕,并且在等待左边第二栏中设置的触发条件满足时,立即开始数据的捕捉和采集。
5.数据采集完毕后,等待从驱动器中上载完毕,绘制在示波器栏中
6.此时可以继续使用示波器顶部的按钮进行分析,例如放大缩小局部图形,添加光标观察,进行
FFT转换等,以及保存图形文件,方便下次导入进行分析。
调试
Somove提供两种方式的自整定,分别是简单自整定和舒适自整定。
连接上驱动器,并且获得驱动器的控制权之后,进入调试页面可以看到这两种整定模式。
简单自整定/EasyTuning:
1)选择Easy按钮
2)直接点击下方控制面板的Start/启动按钮即可开始简单自整定
舒适自整定/ComfortTuning:
1)选择Comfort按钮
2)舒适自整定/ComfortTuning需要设置整定运动的各项参数
需要注意的是,设置的运动参数必须合理,能构成一个完整的速度梯形
1)P9-20 选择整定方向是单向运动或者来回运动
2)P9-26 设置整定的运动距离,这个值设置好之后会自动复制到P9-27中,如果P9-20
设置成来回运动,则P9-27值是P9-26值的负数,如果P9-20设置成单向运动,则P9-27
值和P9-26相等
3)P9-31设置运动的加减速度,其中AAAA中设置加时间,BBBB中设置减速时间
4)P9-32设置运动的速度,其中AAAA中设置正向运动速度,BBBB中设置反向运动速度
5)P2-32选择自整定趋向是最小超调还是最短稳态时间,以及是否自动测量并抑制振动
6)自整定还可以自己测量加速度前馈,但是需要在参数列表中将P9-36设置为1
7)设置完成后,点击下方控制面板的Start/启动按钮即可开始舒适自整定
8)注意观察提示信息,如果整定不能启动,有可能是参数设置不合理,不能构成一个完整
的速度梯形或这有其他原因
我的仪表板
这是一个仪表板,将前面可视化和参数列表中的数据集合在一起显示和直接修改,目的是方便操作。
比较有意义的项目是Direct Access,通过输入Modbus地址的方式,可以直接读取参数值,并且参数值可以实时显示,不需要像在参数列表页面中那样需要手动刷新。
1)从参数列表中查找参数的Modbus地址
2)按Read可以直接读取参数名称及参数值
3)按Visualize可以将参数加入观察列表,实时观察参数值变化。