3 无刷直流电动机的电磁设计
3.1 基本要求和主要指标
3.1.1基本要求
(1) 运行方式
直流无刷电动机的运行方式有连续、短时和断续三种
(2) 防护形式
一般直流电动机的防护型式主要有防护式和封闭式两种。
(3) 温升
一般交流电机包括同步电机和感应电机,转子不计算铁耗,然而该类电机正常稳态运行时,定子绕组产生的2个旋转磁场转速与转子本体转速存在较大的转差,转子铁芯损耗不容忽视。不仅电磁设计时,其电磁负荷的选择应与常规电机有所区别,而且对通风冷却结构设计应予足够的重视。
(4) 效率
(5) 电动机的转速变化率
明确电机转速运行的最大区间,并应指明电机的常用转速区间,以便选择合适的电机数据,获得良好的力能指标。
3.1.2主要指标
①额定功率P N = 100W
②额定电压U N = 270V
③额定转速n N = 1000 r/min
④定子相数m = 3
⑤极对数p = 4
⑥定子槽数Z = 18
3.2 主要尺寸的确定
3.2.1 定子铁心内径D a的选择
我国目前制造的直流电机,其D a 与输出功率P N 的关系曲线如下,它可以作为选定D a 的初步依据。
由于P N /n N =0.0001,从张琛的《直流无刷电动机原理及应用》中图3.1定子内径D a 与单位转速输出功率P N /n N 的关系曲线查得:
cm D a 5.5~0.4=,则取cm D a 5=
3.2.2 电磁负荷的选择
电负荷A 与磁负荷B 的选择与电动机的主要尺寸直接相关。同时,A ,B 的选择与电动机的运行性能和使用寿命也密切相关,因此必须全面考虑各种因素,才正确选择A,B 的值。 (1) 线负荷A 高,磁负荷B 不变
① 电机体积减小,节约材料
② B 一定时,由于铁心重量减小,铁耗减小 ③ 绕组用铜量增加
④ 增大电枢单位表面上铜耗,绕组温升增高 ⑤ 影响电机参数和电机特性: q a =ρAJ (2) 磁负荷B 高,线负荷A 不变
① 电机体积减小,节约材料 ② 基本铁耗增大 ③ 磁路饱和程度增大 ④ 影响电机参数和电机特性
电负荷A 与磁负荷B 与定子的内径D a 有关,根据已生产的电动机的经验数据绘制成曲线。 由于D a =5cm ,由张琛的《直流无刷电动机原理及应用》中图3.2电负荷A 与定子内径D 的关系得电负荷A=75~150A/cm ,取A =90。
由于D a =5cm ,由张琛的《直流无刷电动机原理及应用》中图3.3磁负荷B 与定子内径D 的关系得磁负荷B=0.50~0.65T ,取B=0.55T
3.2.3 转子磁钢计算长度L a 的确定
先确定极弧系数δα,由经验数据得确定9.0=δα。
转子磁钢计算长度:
n p
k AD B L D a a ???=ηαδδ27
101.6 ,则cm L
a
0.7=
3.2.4 转子长度L a 与直径D a 的比值λ
a
a
D L =
λ的大小对电动机的性能指标和经济指标是有影响的。一般对于无刷电动机来说,由于采用了电子换向且转子由永磁材料组成,转子本身不存在发热问题,而定子的散热可以借助于外壳,λ可取得大一些。
因此,4.1==
a
a
D L λ,由张琛的《直流无刷电动机原理及应用》中图3.4λ与转子外径D a 的关系知符合要求。
3.2.5 定子外径D 、转子内径d 和气隙长度δ的确定
根据同规格的无刷电动机的尺寸,则定子外径D =8cm , 转子内径d =2cm . 由经验公式:
δ
δ
B A
D a
?
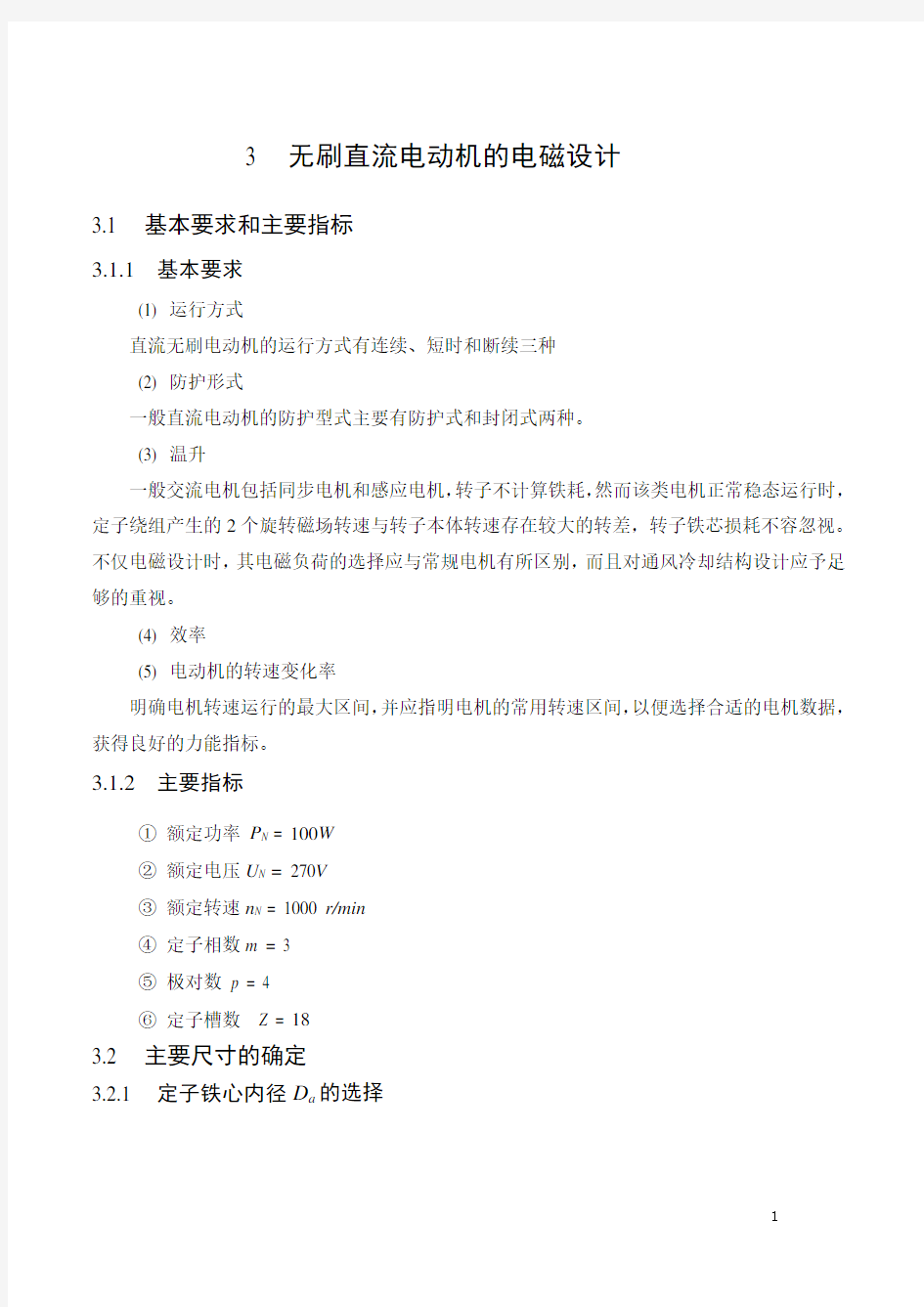
?≥-7106.3, 即mm 5.0≥δ, 取mm 75.0=δ 3.2.6 定子槽形的设计
定子槽形采用梨形槽,且齿部平行。 极距τ=
p
D a
2π,则m 0285.0=τ
定子齿距 Z
D t a
π=
,则m t 0122.0=
槽口尺参考类似产品,取
b 0=1.11mm,h 0=0.23mm,b 1=2.26mm,r 1=1.5mm,h 1+h 2=4.46mm,h s =6.19mm . 令T B t 77.0=,则齿宽: m B k tB b t
Fe t 00675.0==
δ
. 初步设定T B j 25.0=,定子轭部估计高度: m B k B h j
Fe j 021.02==δ
δτα
齿宽计算如下:
m r Z
h h h D b a t 007364.02)
222(1210=-+++=π
m b Z
h h D b a t 00668.0)
22(110=-++=
π
齿部基本平行,齿宽:m b t 00702.0=(平均值)。绘制的定子槽形如下:
图3.5定子槽形
3.2.7 转子永磁体设计
对于退磁曲线可近似线性化处理的永磁材料,气隙磁通密度B δ可给出为:
m m r r h l B B /(σμδ=) (3-1)
式中 δB ——永磁体剩磁密度
r μ——相对回复磁导率
m l ——气隙总长度 m h ——磁体厚度
σ——漏磁系数,定义为总磁通与气隙主磁通之比
在磁极内外径确定以后,关键的问题是如何选用永磁体厚度。分析表明,H m B m 最大时,永磁体的利用最经济。进一步可知B m =B r /2。对于钕铁硼永磁材料可近似有μr μ0≈μ0,而忽略漏磁时有B δ≈B m ,则根据式(1),可得理想情况下,当l δ=h m 时,永磁体可得以最经济利用。但设计中,综合考虑,通常经验选取l δ<h m 。 因此,取h m =2δ=1.5mm .
3.3 磁路计算
3.3.1 永磁体工作点的确定
磁路设计,首先要据磁路选取合适的磁体,并确定其工作点B m 、H m 。为满足磁通稳定性的要求,磁体工作点应选在磁体最大磁能积点的上方。由于磁体工作点与磁性能和磁体尺寸有关,故选定所使用的磁体后,便是要选择合适的磁体尺寸,以得到合理的工作点。
在电机中,我选用的是XG 160/120型号的稀土钴永磁材料。其剩余磁感应强度B r =0.84T,H c =600kA/m .根据永磁体的尺寸计算对应的磁动势和磁通,即
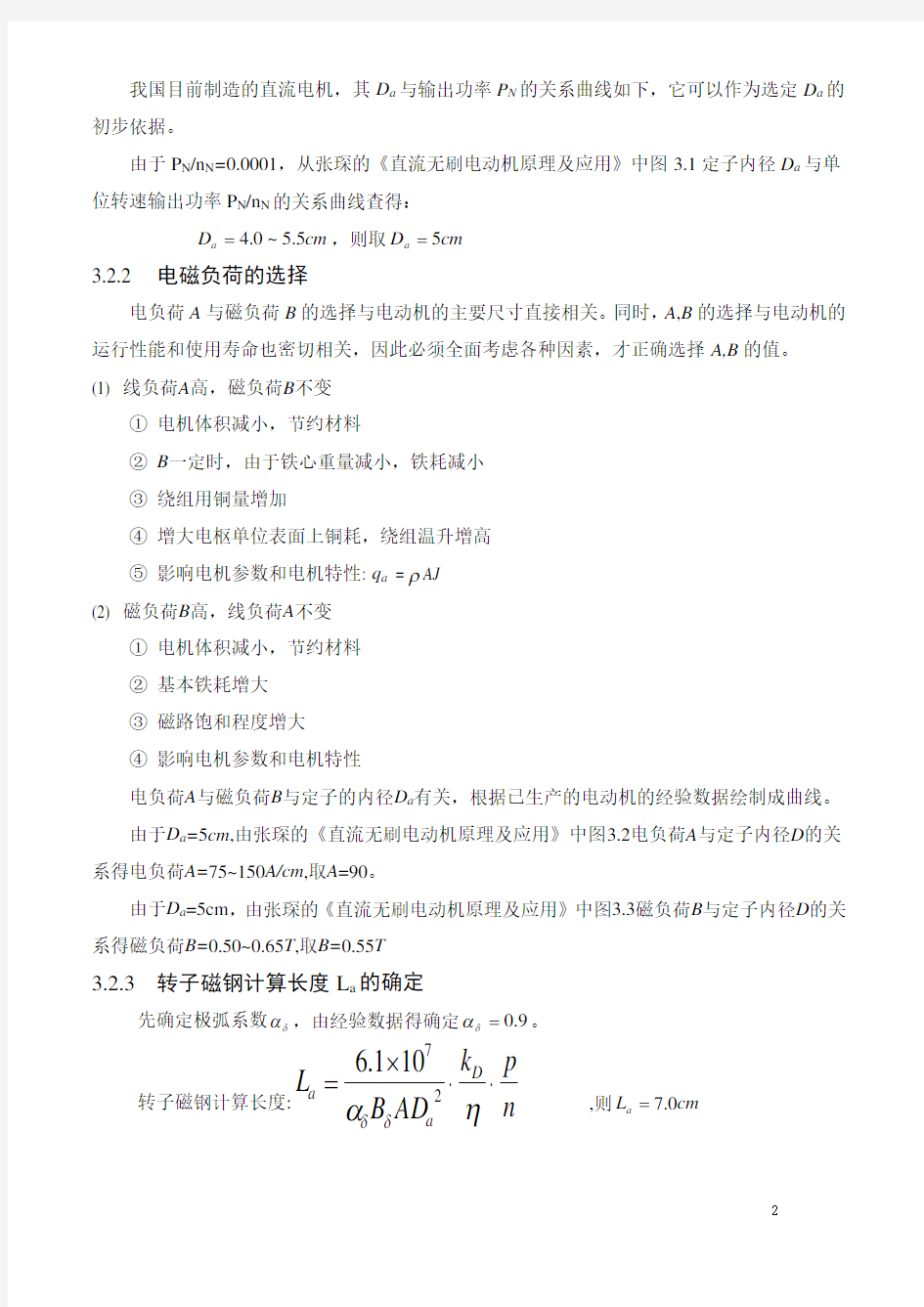
W b W b B A k m m Fe 00111.0102.133392.088.06=???==Φ-γ, A h H F c c c 960==.先用程序设计的方法绘出电动机的磁化曲线。再画出永磁体的退磁曲线,即把退磁曲线画成以r Φ(0,0.00111)和F c (960,0)连成的直线。此时,退磁曲线与电动机的磁化曲线的交点(m Φ,F m ),即为永磁体工作点。经过程序设计图解法,采用试探法,得m Φ=0.000726Wb .
程序设计画图求值相关内容见(3.6 程序设计,详细程序见附录1)。 如下图所示:
图3.6永磁体工作点的确定
3.3.2 各部分磁动势的计算
注:σ为漏磁系数,这里统一取σ=1.11。 (1) 定子齿部的磁动势
每极定子齿部截面积:
A t = k Fe L a b t Z 1
= 0.92?0.07?0.00702?
4
9
F m F c
F
ΦΦΦ
=1017.2610-?m 2.
定子齿部的磁场密度
t
t A
B δσαΦ
=
= 6
-10
1017.29.011.1000726
.0??? = 0.62T
查表D 22硅钢片磁化曲线:H t =186A/m. 定子齿部的磁路长度 L t =(h 1+h 2)+
3
1
r =0.00496m 定子齿部的磁动势 F t = H t L t
=186×0.00496 =0.923A .
(2) 定子轭部的磁动势
定子轭部计算高度:h j1=
3
21r
h D D s a +-- =(
3
5
.119.625080+--)310-?m =9.31310-?m .
则定子轭部导磁面积:A j1= k Fe L a h j1
=0.92?0.07?0.00931
=599610-?m 2. 定子轭部的磁场密度 B j1=
1
2j A δσαΦ
=
6
-10 9959.011.12000726
.0????
= 0.67T
查表D 22硅钢片磁化曲线:H j1=200A/cm . 定子轭部磁路长度 L j1=
2
1
2)(1?-p
h D j π=0.01388m
定子轭部的磁动势 F j1=H j1L j1 =200×0.01388
=2.78A
(3) 转子轭部的磁动势 转子轭部计算高度:h j2=
δδ22
---d
Da =10310-?m 转子轭部导磁截面积:A j2= k Fe L a h j2
=0.92?0.07?0.01
=644610-?m 2. 转子轭部的磁场密度 B j2=
2
2j A δσαΦ
=
6
-106449.011.12000726
.0????
= 0.63T
查表D 22硅钢片磁化曲线:H j2=189A/cm . 转子轭部磁路长度 L j2=
2
1
2)(2?+p
h d j π=0.00589m 转子轭部的磁动势 F j2=H j2L j2 =189×0.00589 =1.112A
(4) 气隙的磁动势
每极下空气隙截面积:A δ=τLa =0.0196?0.07 =1372?10-6m 2.
气隙的磁场密度 B δ=
δ
δσαA Φ
=
6
-10
13729.011.1000726
.0??? = 0.53T
气隙的磁动势 F δ= 0
μδ
δδB k
=
6
10
4.000075
.053.0025.1-????π
= 324.23A 其中,气隙系数δk = 2
00)75.04.4()75.04.4(b b t b t -++δδ =1.025
因此,每极下的总磁动势 F = F t +F j1+F j2+F δ
= 0.923+2.78+1.112+324.23 =329.045A
3.4 绕组设计
(1) 绕组的结构
定子绕组分布式绕组。分数槽绕组的无刷直流电动机,电枢槽数不仅可以不是极数的整数倍,而且槽数可以少于磁极数,只要满足绕组对称条件就能保证各相产生的转矩对称。常见的分数槽绕组q 为一个假分数
d
c
b q +
= 式中,b 为整数,c/d 为一不可约的真分数,该种绕组的对称条件及排列方法已介绍。当z <2p ,q 为真分数,是否能够组成对称绕组,对称条件又是如何?仔细分析交流绕组的对称条件对q 为真分数时依然适用。可以简洁表述为
d
c
mp z q ==
2 式中:d 与c 为无公约数,当d 不是m 或m 的倍数,如果各相绕组彼此位移2c (d 为奇数)或c 个槽距(d 为偶数),则该绕组必定是对称的。
(2) 绕组的连接
三相及多相无刷直流电动机电枢绕组连接方法主要有星形和多边形连接。下图表示由桥形电路供电三相永磁无刷电机电枢绕组连接图。
其中:S A ……S c 及S A ……S C 表示由晶体管组组成开关电路,W A ……W c 表示电枢绕组。图中实线表示星形联接,三相绕组有一个星形中点0。三相绕组按虚线联接则构成多边形联接。
图3.7三相永磁无刷电机电枢绕组连接图
三相绕组联接成星形有一个中点。不同的联接方式,同一种联接方式中点数目不同或联接次序不同,采用适当的通电方式,对电机主要性能没有太大影响,但影响电子开关线路的参数,影响电枢磁势中谐波含量,影响转矩脉动。
(3) 线圈匝数
由公式N φ=
N
a l
n L pB E ταδδ5.7
然后,计算得N φ=285匝。
(4) 定子绕组导线截面积的选择
定子绕组导线电流密度J 'a =A
AJ a
=5A/2m m
其中查表的AJ a =450(A/cm ).( 5A /2m m )
1 6
于是,预计的导线截面积Cua
A ' =a
a
J I ' =0.63mm 2
在查表的相近的导线规格A Cua =0.5675mm 2,导线的直径为0.85mm
(5) 定子绕组导线的总长重量和电阻的计算 绕组元件的平均半匝长度 L aav =L a +1.5τ =7+1.5?2.85 =11.275cm 定子一相绕组总长度 L Cua =2N φL aav
=5680cm
绕组铜重G Cua =m8.9L Cua A Cua 510-?
=0.1135Kg
定子一相绕组电阻R C a 。75=
41017.2-??Cua
Cua
A L =2.17Ω
3.5 参数计算和性能计算
定子相电流 I a =
φ
πm N AD a
2
= 0.83A
电磁转矩 T n =
a
I pN a πφ2Φ
=0.227N.m
额定工作点的反电动势 E N e n C δΦ= =
δ
δφα152N
n pN Φ
=25V
3.6 程序设计框图
下面是电机永磁体工作点的程序框图 详细程序见附录1。
N
Y
图3.8电机永磁体工作点的程序框图
电机与拖动基础 课程设计报告 设计题目: 学号: 指导教师: 信息与电气工程学院 二零一六年七月
直流无刷电机本体设计 1. 设计任务 (1) 额定功率 80N P W = (2) 额定电压310N U V ≤ (3) 电动机运行时额定转速 1000/min N n r = (4) 发电机运行时空载转速max 6000/min n r = (5) 最大允许过载倍数 2.5λ= (6) 耐冲击能力21500/m a m s = (7) 机壳外径42D mm ≤ 设计内容: 1. 根据给定的技术指标,计算电机基本尺寸,包括:定子铁心外径、定子铁心内径、铁心长度等。 2. 磁路计算,包括极对选择、磁钢选型、磁钢厚度、气隙长度等方面计算。 3. 定子绕组计算,包括定子绕组形式、定子槽数、绕组节距等计算。 2. 理论与计算过程 2.1 直流无刷电机的基本组成环节 直流无刷电动机的结构原理如图2-1-1所示。它主要由电机本体、位置传感器和电子开关线路三部分组成。电机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,……)组成。图中的电机本体为三相电机。三相定子绕组分别与电子开关线路中相应的功率开关器件连接,位置传感器的跟踪转子与电动机转轴相连接。 当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。 因此,所谓直流无刷电机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电机以及位置传感器三者组成的“电动机系统”。其原理框图如图2-1-2所示。
3 无刷直流电动机的电磁设计 3.1 基本要求和主要指标 3.1.1基本要求 (1) 运行方式 直流无刷电动机的运行方式有连续、短时和断续三种 (2) 防护形式 一般直流电动机的防护型式主要有防护式和封闭式两种。 (3) 温升 一般交流电机包括同步电机和感应电机,转子不计算铁耗,然而该类电机正常稳态运行时,定子绕组产生的2个旋转磁场转速与转子本体转速存在较大的转差,转子铁芯损耗不容忽视。不仅电磁设计时,其电磁负荷的选择应与常规电机有所区别,而且对通风冷却结构设计应予足够的重视。 (4) 效率 (5) 电动机的转速变化率 明确电机转速运行的最大区间,并应指明电机的常用转速区间,以便选择合适的电机数据,获得良好的力能指标。 3.1.2主要指标 ①额定功率P N = 100W ②额定电压U N = 270V ③额定转速n N = 1000 r/min ④定子相数m = 3 ⑤极对数p = 4 ⑥定子槽数Z = 18 3.2 主要尺寸的确定 3.2.1 定子铁心内径D a的选择
我国目前制造的直流电机,其D a 与输出功率P N 的关系曲线如下,它可以作为选定D a 的初步依据。 由于P N /n N =0.0001,从张琛的《直流无刷电动机原理及应用》中图3.1定子内径D a 与单位转速输出功率P N /n N 的关系曲线查得: cm D a 5.5~0.4=,则取cm D a 5= 3.2.2 电磁负荷的选择 电负荷A 与磁负荷B 的选择与电动机的主要尺寸直接相关。同时,A ,B 的选择与电动机的运行性能和使用寿命也密切相关,因此必须全面考虑各种因素,才正确选择A,B 的值。 (1) 线负荷A 高,磁负荷B 不变 ① 电机体积减小,节约材料 ② B 一定时,由于铁心重量减小,铁耗减小 ③ 绕组用铜量增加 ④ 增大电枢单位表面上铜耗,绕组温升增高 ⑤ 影响电机参数和电机特性: q a =ρAJ (2) 磁负荷B 高,线负荷A 不变 ① 电机体积减小,节约材料 ② 基本铁耗增大 ③ 磁路饱和程度增大 ④ 影响电机参数和电机特性 电负荷A 与磁负荷B 与定子的内径D a 有关,根据已生产的电动机的经验数据绘制成曲线。 由于D a =5cm ,由张琛的《直流无刷电动机原理及应用》中图3.2电负荷A 与定子内径D 的关系得电负荷A=75~150A/cm ,取A =90。 由于D a =5cm ,由张琛的《直流无刷电动机原理及应用》中图3.3磁负荷B 与定子内径D 的关系得磁负荷B=0.50~0.65T ,取B=0.55T 3.2.3 转子磁钢计算长度L a 的确定 先确定极弧系数δα,由经验数据得确定9.0=δα。 转子磁钢计算长度: n p k AD B L D a a ???=ηαδδ27 101.6 ,则cm L a 0.7=
电动车无刷电机控制器软件设计详解作者:谢渊斌原作发表在《电子报2007年合订本》下册版权保留,转帖请注明出处本文以MICROCHIP公司所生产的PIC16F72为基础说明软件编程方面所涉及的要点,此文所涉及的源程序均以PIC的汇编语言为例。由于软件不可避免需与硬件相结合,所以此文可能出现硬件电路图或示意图。本文适合在单片机编程方面有一定经验的读者,有些基础知识恕不一一介绍。我们先列一下电动车无刷马达控制器的基本要求:功能性要求:1.电子换相2.无级调速3.刹车断电4.附加功能a.限速b.1+1助力c.EBS柔性电磁刹车d.定速巡航e.其它功能(消除换相噪
音,倒车等)安全性要求:1.限流驱动2.过流保护3.堵转保护3.电池欠压保护4.节能和降低温升5.附加功能(防盗锁死,温升限制等)6.附加故障检测功能从上面的要求来看,功能性要求和安全性要求的前三项用专用的无刷马达驱动芯片加上适当的外围电路均不难解决,代表芯片是摩托罗拉的MC33035,早期的控制器方案均用该集成块解决。但后来随着竞争加剧,很多厂商都增加了不少附加功能,一些附加功能用硬件来实现就比较困难,所以使用单片机来做控制的控制器迅速取代了硬件电路芯片。但是硬件控制和软件控制有很大的区别,硬件控制的反应速度仅仅受限于逻辑门的开关速度,而软件的运
行则需要时间。要使软件跟得上电机控制的需求,就必须要求软件在最短的时间内能够正确处理换相,电流限制等各种复杂动作,这就涉及到一个对外部信号的采样频率,采样时机,信号的内部处理判断及处理结果的输出,还有一些抗干扰措施等,这些都是软件设计中需要再三仔细考虑的东西。PIC16F72是一款哈佛结构,精简指令集的MCU,由于其数据总线和指令总线分开,总共35条单字指令,0-20M的时钟速度,所以其运算速度和抗干扰性能都非常出色,2K 字长的FLASH程序空间,22个可用的IO 口,同时又附加了3个定时/计数器,5个8位AD口,1个比较/捕捉/脉宽调制器,8个
无刷直流永磁电动机设计实例 一. 主要技术指标 1. 额定功率:W 30P N = 2. 额定电压:V U N 48=,直流 3. 额定电流:A I N 1< 3. 额定转速:m in /10000r n N = 4. 工作状态:短期运行 5. 设计方式:按方波设计 6. 外形尺寸:m 065.0036.0?φ 二. 主要尺寸的确定 1. 预取效率63.0='η、 2. 计算功率i P ' 直流电动机 W P K P N N m i 48.4063 .030 85.0'=?= = η,按陈世坤书。 长期运行 N i P P ?'' += 'ηη321 短期运行 N i P P ?'' += 'η η431 3. 预取线负荷m A A s /11000'= 4. 预取气隙磁感应强度T B 55.0'=δ 5. 预取计算极弧系数8.0=i α 6. 预取长径比(L/D )λ′=2
7.计算电枢内径 m n B A P D N s i i i 233 11037.110000 255.0110008.048 .401.61.6-?=?????=''''='λαδ 根据计算电枢内径取电枢内径值m D i 21104.1-?= 8. 气隙长度m 3107.0-?=δ 9. 电枢外径m D 211095.2-?= 10. 极对数p=1 11. 计算电枢铁芯长 m D L i 221108.2104.12--?=??='='λ 根据计算电枢铁芯长取电枢铁芯长L= m 2108.2-? 12. 极距 m p D i 22 1 102.22 104.114.32--?=??==πτ 13. 输入永磁体轴向长m L L m 2108.2-?== 三.定子结构 1. 齿数 Z=6 2. 齿距 m z D t i 22 1 10733.06 104.114.3--?=??==π 3. 槽形选择 梯形口扇形槽,见下图。 4. 预估齿宽: m K B tB b Fe t t 2210294.096 .043.155 .010733.0--?=???==δ ,t B 可由 设计者经验得1.43T ,t b 由工艺取m 210295.0-? 5. 预估轭高: m B K B a K lB h j Fe i Fe j j 211110323.056 .196.0255 .08.02.222-?=????=≈Φ= δδτ
9-10 直流无刷电机的设计 9-10-1直流无刷电机的概述 直流电机有无可伦比的优点,体积小,重量轻,结构简单,速度变化范围大,供源简单,移动方便,价格低廉,制造简单,工艺性好等等,是我国用量最大的一种电机。 但是直流电机由于换向的需要,因此必需要由电刷和换向器来换向。由于换向器和电刷的作用,就给电机带来各种不良的影响,如噪声,电刷运行寿命,电机干扰和电机本身体积等问题。直流电机最大的缺点是电机寿命远远不如交流电机,交流同步电机等等无刷电机。 交流电机,交流同步电机是交流供电的,由于用的是交流电源,在50HZ 的交流电源中,一对极的交流异步电机的同步理论转速是:m in /30001 50 6060r p f n =?=?= ,在交 流同步电机中的同步转速也应该为m in /3000r ,如果把电源的频率调高或调低,则电 机的工作转速也可以很高或者较低的。但这个电机的供源是交流电,如果把直流电源通过电 路的转换,变成可以交变的波形供给交流电机或交流同步电机,那么交流异步电机或交流同步电机也可以很好的转动起来的,这就是直流无刷电机的最直观的概念。 要把直流电转换成单相或三相交变电源,在上世纪中叶还是一个非常麻烦的事,那时只有电子真空管,体积很大,输出电流很小,那时台式收音机就有12英寸的电视机那么大,无法和现在手指那么大的MP3相比拟。后来发明了半导体和相应的各种半导体技术使电子控制技术推向了一个新纪元。各种电源逆变,分配技术,换相技术的相继出现,许多高性能,高功率的半导体器件的研制成功,从而使电机领域出现了机电一体化的步进电机,直流无刷电机,并迅速在各个领域得到了广泛的应用。 当出现了永磁直流无刷电机后,就体现了它强大的生命力,永磁直流无刷电机有许多优点,如干扰小,(电路部分有一定的电磁干扰的),运行寿命长,调速性能好,控制方法多,输出力矩大,过载能力强,调速范围宽,起动响应快,运行平稳,效率高等。永磁无刷直流电机有许多交流异步电机,步进电机和直流电机不具备的优点。它广泛应用于办公机械,电脑,音响,通风行业,自动控制,仪器仪表,汽车,国防工业等等领域,特别一提的是,在电脑中,光驱动器,硬盘,DVD 等大量用了非常精密的形式不一的永磁无刷直流电机,目前社会上人们所骑的电动自行车上的电机绝大都数是采用了永磁直流无刷电机,这个量非常可观,这些也是用得最广泛,生产量最多的直流无刷电机。永磁直流无刷电机已经在时刻影响着人们的生活,在左右人类的生活的历史。 随着控制器的小型化,模块化,以前做得较大的控制器现在可以做得更小,有的可以和电机做在一起,使永磁无刷电机使用起来那么方便,那么的得心应手。许多永磁直流电机日益被永磁无刷直流电机所替代。在电机界,研究,开发永磁直流无刷电机是一种新的趋势。这方面的论著也比以往多起来了。 9-10-2永磁直流无刷电机工作原理 从电磁原理看,电机中如果一个永磁多极磁钢的转子(一对极也可以),外面的定子是由相对应极数的线圈组成,定子线圈如果能够产生一个单向的旋转磁场(不是脉振磁场)的话,转子因为该磁场的磁极作用而跟转,这样电机就可以转动起来,如果转子上加了个负载,为
] ~ 无感无刷直流电机 基础原理 $ ;
前言 1.本文主要讲解无感无刷直流电机的基础原理部分,后续深入理解强烈推荐<<无感无刷电调设计全攻略>> 2. 如果发现我哪些内容讲错了,请加QQ不吝指正。 永夜极光 2017年 2 月
1. 无刷直流电机基础知识 三个基本定则 搞电调不是设计电机,不要被无刷电机教材的磁路、磁导率、去磁曲线等术语吓倒,那些东西对搞电调的人来说,意义不大。对入门开发者来说,只需要记牢三个基本定则:左手定则,右手定则,右手螺旋定则。 左手定则--通电导体在磁场中受到力的作用 导体受力方向 1.伸开左手,使大拇指和其余四指垂直 2.把手心面向 N 极,四指顺着电流的方向,那么大拇指所指方 向就是导体受力方向。 力的大小:F = BILsinθ B为磁感应强度(单位 T) I为电流大小(单位 A) L 为导体有效长度(单位 m) F 为力的大小(单位 N),θ为: B 和I 的夹角。 右手定则--导体切割磁感线,产生感应电动势 电动势大小:E = vBLsinθ v 为导体的运动速度(单位m/s) B 为磁感应强度(单位 T) L 为导体长度(单位m) θ为B和L的夹角。
右手螺旋定则--通电螺线管能够产生磁场 磁场方向 1.右手握住通电螺线管 2.使四指弯曲与电流方向一致 3.大拇指所指的那一端就是通电螺旋管的 N 极。 磁铁静止时的指向 静止时,条形磁铁方向与磁场方向相同
电机基本概念 电动机: 电动机也叫马达,电动机是将电能转换成机 械能的部件。 转子: 电动机工作时转动的部分。 定子: 电动机工作时不转动的部分。 内转子电机:转子在定子内部 外转子电机:转子在定子外部 绕组: 绕组就是定子或者转子上的线圈,通电后就会形成一 定的磁场,从而推动转子旋转 磁极结构:后文的磁极只标明了表面的磁极,省略了不起作用的磁极 极数: N极,S级的总数,右图电机有6极 极对数: 一个南极(S极) ,一个北极(N极) ,算一对磁极极对数=级数÷2,右图电机有3极对 机械角度: 就是数学中的“空间几何角度”,恒等于360度。 电角度: 磁场每转过一对磁极,导体的电动势变化一个周期,定义一个周期为360°电角度。 电角度=机械角度*极对数 若电机有K对极,那么整个定子内圆有K*360°电角度,右图电机有4对极,因此一圈是360°机械角度,1440°电角度
无刷直流电动机硬件设计 3.1 逆变主电路设计 3.1.1 功率开关主电路 图3-1 功率开关主电路原理图 逆变器将直流电转换成交流电向电机供电。与一般逆变器不同,它的输出频率不是独立调节的,而是受控于转子位置信号,是一个“自控式逆变器”。由于采用自控式逆变器,无刷直流电动机输入电流的频率和电机转速始终保持同步,电机和逆变器不会产生振荡和失步,这也是无刷直流电动机的重要优点之一。 3.1.2 逆变开关元件选择和计算 MOSFET在1960年由贝尔实验室(Bell Lab.)的D. Kahng和 Martin Atalla 首次实验成功,这种元件的操作原理和1947年萧克莱(William Shockley)等人发明的双载子晶体管(Bipolar Junction Transistor, BJT)截然不同,且因为制造成本低廉与使用面积较小、高整合度的优势,在大型积体电路(Large-Scale Integrated Circuits, LSI)或是超大型积体电路(Very Large-Scale Integrated Circuits, VLSI)的领域里,重要性远超过BJT。 近年来由于MOSFET元件的性能逐渐提升,除了传统上应用于诸如微处理器、微控制器等数位讯号处理的场合上,也有越来越多类比讯号处理的积体电路可以用MOSFET来实现。 表3-1对IGBT、GTR、GTO 和电力MOSFET的优缺点的比较 器件优点缺点
IGBT 开关速度高,开关损耗小,具有耐脉冲电流冲击的能力,通态压降较低,输入阻抗高,为电压驱 动,驱动功率小 开关速度低于电力MOSFET,电压,电流容量 不及GTO GTR 耐压高,电流大,开关特性好,通流能力强,饱和压降低 开关速度低,为电流驱动,所需驱动功率大,驱 动电路复杂,存在二次击 穿问题 GTO 电压、电流容量大,适用 于大功率场合,具有电导 调制效应,其通流能力很 强 电流关断增益很小,关断时门极负脉冲电流大,开关速度低,驱动功率大,驱动电路复杂,开关频率 低 电 力 MOSFET 开关速度快,输入阻抗高,热稳定性好,所需驱动功率小且驱动电路简单,工作频率高,不存在 二次击穿问题 电流容量小,耐压低,一般只适用于功率不超过 10kW 的电力电子装置 通过上述的比较,我选择MOSFET 。 电枢额定电流I aH =8.5A ,因为每个控制元件导通120o ,所以控制元件的峰值电 流可以由以下方程算出。 2/3018.52Idt ππ =?,通过计算可得I=25.5A , 额定电压U H =36V ,峰值电压应有一个百分之40的余量所以 U M =U H *1.4=36*1.4=50.4V 通过以上计算,可得出选择的MOSFET 峰值电流为25A,峰值电压为50V 。 3.2 逆变开关管驱动电路设计 3.2.1 IR2110功能介绍 (1) IR2110的特点有:输出驱动隔离电压可达500V ;芯片自身的门输入驱动范围为10~20V ;输入端带施密特触发电器;可实现两路分立的驱动输出,可驱 动高压高频器件,如IGBT 、功率MOSFET 等,且工作频率高可达500KHz ,开通、关断延迟小,分别为120ns 和94ns ;逻辑电源的输入范围(脚9)5~15V ,可方便的与TTL ,CMOS 电平相匹配。 (2) IR2110 主要功能及技术参数
电动车无刷电机控制器软件设计详解??作者:谢渊斌原作发表在《电子报2007年合订本》下册 版权保留,转帖请注明出处? 本文以MICROCHIP 公司所生产的PIC16F72为基础说明软件编程方面所涉及的要点,此文所涉及的源程序均以PIC的汇编语言为例。?由于软件不可避免需与硬件相结合,所以此文可能出现硬件电路图或示意图。??本文适合在单片机编程方面有一定经验的读者,有些基础知识恕不一一介绍。?我们先列一下电动车无刷马达控制器的基本要求:功能性要求: 1.电子换相? 2.无级调速 3.刹车断电 4.附加功能 a.限速 b.1+1助力?c.EBS柔性电磁刹车?d.定速巡航?e.其它功能(消除换相噪音,倒车等) ?安全性要求:?1.限流驱动 2.过流保护?3.堵转保护 3.电池欠压保护?4.节能和降低温升?5.附
加功能(防盗锁死,温升限制等)?6.附加故障检测功能? 从上面的要求来看,功能性要求和安全性要求的前三项用专用的无刷马达驱动芯片加上适当的外围电路均不难解决,代表芯片是摩托罗拉的MC33035,早期的控制器方案均用该集成块解决。但后来随着竞争加剧,很多厂商都增加了不少附加功能,一些附加功能用硬件来实现就比较困难,所以使用单片机来做控制的控制器迅速取代了硬件电路芯片。?但是硬件控制和软件控制有很大的区别,硬件控制的反应速度仅仅受限于逻辑门的开关速度,而软件的运行则需要时间。要使软件跟得上电机控制的需求,就必须要求软件在最短的时间内能够正确处理换相,电流限制等各种复杂动作,这就涉及到一个对外部信号的采样频率,采样时机,信号的内部处理判断及处理结果的输出,还有一些抗干扰措施等,这些都是软件设计中需要再三仔细考虑的东西。 PIC16F72是一款哈佛结构,精简指令集
上传说明: 本论文仅供大家学习和参考用
无刷直流电动机的设计摘要 【摘要】 无刷直流电动机是近年迅速兴起的一种新型电机,它广泛应用与工业,农业,以及军事等领域。无刷直流电动机既保持了直流电动机良好的调速控制特性,又消除了电刷和换向器的机械接触。 本文是对无刷直流电动机做出深入的剖析与设计。无刷直流电动机是一种具有高效率、低磨损、低噪声的新型直流电机机种.本设计在介绍无刷直流电动机设计中,关于相数、极数、槽数及绕组连接方式的选择方法和应遵从的规律.而且针对小功率直流电动机结构特点和工作性能,在电枢反应理论基础上设计出功率为120w的无刷直流电动机,并对霍尔位置传感器和无刷电动机的控制及驱动做了详细的分析。 【关键词】设计无刷直流电动机霍尔位置传感器 Design of Brushless DC motor 【Abstract】 Brushless DC motor is rapidly development new motor in the recently, and it widely used in industry、agriculture and in the army. The better governing speed characteristic is kept and the mechanical touch between brushes and commutator is removed as well in brushless DC Motors. This paper intends to make a better on the Design of Brushless DC motor .The DC motor without coal brushless is in a new style, with higher work rate. Less wear and lower noise. This paper presents the method of selecting phase, slot number and winding connection type and introduces the laws that should be obey in the design of brushless DC motor. Also based on introducing the structure of a light power DC motor, a 120w light power DC motor is design according to the theory. Not only make a lot of analyzed about the Hall position sensor in this paper .but also the brushless DC’s controls and the driving-methods for brushless DC. 【Key words】design brushless DC motor Hall position sensor
A Knowledge Based Decision Support Architecture for Designing Brushless DC Motors Vahab Akbarzadeh Ryerson University 350 Victoria Street Toronto, Ontario M5B 2K3 vahab.akbarzadeh@ryerson.ca Alireza Sadeghian Ryerson University 350 Victoria Street Toronto, Ontario M5B 2K3 asadeghi@ryerson.ca Abstract This paper presents a know l edge based decision support system that can be used to design brushless DC motors. A hybrid approach, that inc l udes an object oriented paradigm using frames and procedura l attachments together with a rul e based mechanism, is used to bui d the proposed architecture. The design strategy is impl emented using a rul e-based successive iterative method, through which the expert designer approach is emul ated and embedded in a knowl edge-based system. The performance of the proposed system is compared with results from the literature. 1. Introduction Application of brushless DC (BLDC) motors has increased significantly over the past decades. This is mainly due to high reliability and efficiency of BLDC motors as well as their ability to reach very high speed. Brushless DC motors are rotational brushless permanent magnet motors which are driven by DC current and use electronic control systems instead of the brushes that are usually used in conventional DC motors. Compared to conventional commutator type DC motors, BLDC motors are more efficient, need less maintenance and have longer life span. On the other hand, the control system of BLDC motors needs a rotor positioning mechanism, and the magnets might gradually demagnetize [1], [8]. BLDC motors have been used in a wide variety of applications from industrial to household devices. Typical examples include industrial tools (pumps, compressors), power tools (drills, hammers), transportation (electric vehicles), and household devices (electric shavers, mixers) [4]. Small BLDC motors have also been extensively used in precision devices including medical equipment, computer drives, hard disks, and players. The conventional design process for BLDC motors consists of selection of the appropriate magnetic material and specification of the geometrical properties of the motor. First, based on the design specifications, the expert designer selects the set of materials to be used for motor construction, including material for the permanent magnet. Properties of the selected materials are then plugged into a set of equations which calculate the geometrical properties of the motor. Characteristics of the proposed design are then measured in terms of indicators such as efficiency, motor constant, weight, and cost. Magnetic modeling in the conventional method is usually simplified to use a magnetic circuit instead of finite element analysis. This simplification reduces the computation complexity of the design process [6]. Table 1 shows the types of knowledge involved in motor design, independent of the design process and the assumptions [7]: Tab l e 1. Types of know l edge to be incorporated in the know l edge base environment DATA TYPE DESCRIPTION Structural Physical data including material, core, wire gauge, etc. Graphical Charts and graphs, e.g., core loss rates of various magnetic materials versus frequency and flux density. Heuristic The empirical knowledge rules used by the experts as a design aid. Procedural The motor design process and the modification steps. Criteria The final performance requirements of the system. Analytical The design and performance equations. This paper presents a knowledge based architecture that provides an attractive setting for the BLDC motor design problem by providing a suitable framework whereby analytical data as well as empirical and heuristic data can be readily incorporated and assessed. By presenting a number of alternate designs that have satisfied the design specifications and vary in one or more key characteristics, the proposed system acts as a knowledge driven decision support system capable of providing assistance to expert designers. A contrasting 978-1-4244-2728-4/09/$25.00 ?2009 IEEE
无感无刷直流电机 基础原理 作者永夜极光技术探讨QQ542255641
前言 1.本文主要讲解无感无刷直流电机的基础原理部分,后续深入理解强烈推荐<<无感无刷电调设计全攻略>> 2. 如果发现我哪些内容讲错了,请加QQ不吝指正。 永夜极光 2017年 2 月
1. 无刷直流电机基础知识 1.1 三个基本定则 搞电调不是设计电机,不要被无刷电机教材的磁路、磁导率、去磁曲线等术语吓倒,那些东西对搞电调的人来说,意义不大。对入门开发者来说,只需要记牢三个基本定则:左手定则,右手定则,右手螺旋定则。 1.1.1 左手定则--通电导体在磁场中受到力的作用 导体受力方向 1.伸开左手,使大拇指和其余四指垂直 2.把手心面向 N 极,四指顺着电流的方向,那么大拇指所指方 向就是导体受力方向。 力的大小:F = BILsinθ B为磁感应强度(单位 T) I为电流大小(单位 A) L 为导体有效长度(单位 m) F 为力的大小(单位 N),θ为: B 和I 的夹角。 1.1. 2. 右手定则--导体切割磁感线,产生感应电动势 电动势大小:E = vBLsinθ v 为导体的运动速度(单位m/s) B 为磁感应强度(单位 T) L 为导体长度(单位m) θ为B和L的夹角。
1.1.3.右手螺旋定则--通电螺线管能够产生磁场 磁场方向 1.右手握住通电螺线管 2.使四指弯曲与电流方向一致 3.大拇指所指的那一端就是通电螺旋管的 N 极。 1.1.4.磁铁静止时的指向 静止时,条形磁铁方向与磁场方向相同
1.2电机基本概念 电动机: 电动机也叫马达,电动机是将电能转换成机 械能的部件。 转子: 电动机工作时转动的部分。 定子: 电动机工作时不转动的部分。 内转子电机:转子在定子内部 外转子电机:转子在定子外部 绕组: 绕组就是定子或者转子上的线圈,通电后就会形成一定 的磁场,从而推动转子旋转 磁极结构:后文的磁极只标明了表面的磁极,省略了不起作用的磁极 极数: N极,S级的总数,右图电机有6极 极对数: 一个南极(S极) ,一个北极(N极) ,算一对磁极极对数=级数÷2,右图电机有3极对 机械角度: 就是数学中的“空间几何角度”,恒等于360度。 电角度: 磁场每转过一对磁极,导体的电动势变化一个周期,定义一个周期为360°电角度。 电角度=机械角度*极对数 若电机有K对极,那么整个定子内圆有K*360°电角度,右图电机有4对极,因此一圈是360°机械角度,1440°电角度