ω 负穿越 相角减小的穿越,N半次穿越 G ( j0+ ) H ( j0+ ) гGH起始或终止于(-1,j0)点左侧负实轴 R=2N=2(N+-N-) N+=0,N-=1 R=2(0-1)=-2
课堂习题
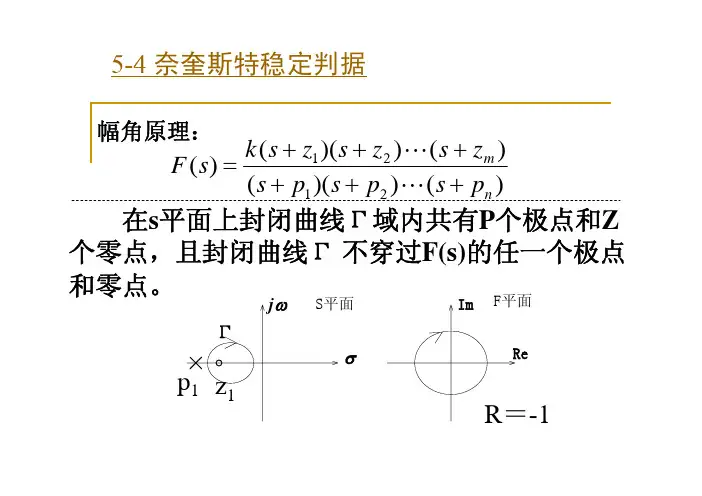
P210 图5-32,计算各小图中,гF包围原点的圈数R
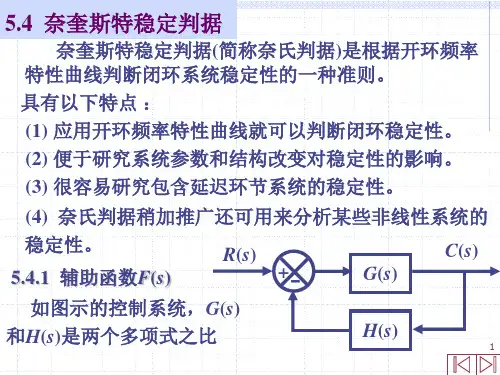
2.Nyquist稳定判据 闭环系统稳定的充分必要条件 1. Nyquist曲线不穿越点(-1,j0) 2. 且逆时针包围(-1,j0)点的圈数R等于开环传 递函数的正实部极点数P 闭合曲线г包围函数F(s)=1+G(s)H(s)的零点数 即闭环控制系统正实部极点数为 Z=P-R=P-2N
εe
jθ
∞e jθ
s = εe
, θ ∈ [0°,+90°]
1 sv G1 ( s )
− jνθ
ε为无穷小
θ
G( s) H ( s) =
1 ν s
G1 ( s ) = K
=
s =εe jθ
1
ε
ν
e
→ ∞e
− jνθ
∏ (τ
j =1 n −ν i =1
m
j
s + 1)
s→0 τ is +1 → 1
∏ (T s + 1)
例5-8 已知单位反馈系统开环幅相曲线(K=10,P=0,v=1),如图 所示,试确定系统闭环稳定时K值的范围 幅相曲线与负实轴交点频率分别ω1,ω2,ω3 解:
G ( jω i ) =
G ( jω1 ) = −2 , G ( jω 2 ) = −1.5 , G ( jω 3 ) = −0.5 10 10 ω = K 若令G(jω1)=-1, 1 K = 若令 G(j ω )=-1, 2 2 2 1 .5 10 −1 同理 K 3 = − 0.5 = 0.5 判断闭环系统稳定性 10