基于WIFI模块和单片机的无线数据传输附代码
- 格式:doc
- 大小:1.71 MB
- 文档页数:32
单片机与无线射频模块的通信方法一、引言单片机与无线射频模块的通信方法在现代无线通信系统中扮演着重要的角色。
本文将讨论常见的单片机与无线射频模块的通信方法,包括串口通信、SPI通信和I2C通信等。
二、串口通信串口通信是单片机与无线射频模块最常见的通信方法之一。
单片机通过串口与无线射频模块进行数据传输。
通常,串口通信包括一个传输数据的引脚(TX)和一个接收数据的引脚(RX)。
单片机通过配置串口通信参数,如波特率、数据位数和校验位等,与无线射频模块进行通信。
三、SPI通信SPI通信是一种全双工的、同步的通信方式,常用于单片机与无线射频模块之间的高速数据传输。
SPI通信需要同时使用四根线进行传输,包括时钟线(SCK)、主设备输出从设备输入线(MOSI)、主设备输入从设备输出线(MISO)和片选线(SS)。
单片机作为主设备发送数据,无线射频模块作为从设备接收数据,并通过SPI总线进行交互。
四、I2C通信I2C通信是一种串行通信协议,适用于单片机与无线射频模块之间短距离的数据传输。
I2C通信只需要两根线,包括串行数据线(SDA)和串行时钟线(SCL)。
单片机通过发送I2C的起始信号来启动通信,然后通过发送地址和数据来与无线射频模块进行通信。
五、无线射频通信方式选择在选择单片机与无线射频模块的通信方法时,需要考虑以下几个因素:1. 通信速率:如果需要高速传输大量数据,SPI通信可能是更好的选择。
2. 距离:如果通信距离较短,I2C通信可以提供简单和成本效益的解决方案。
3. 异常处理:串口通信可以提供更可靠的错误检测和纠正机制。
六、通信参数配置无论选择哪种通信方法,正确配置通信参数非常重要。
通信参数包括波特率、数据位数、校验位和停止位等。
通过准确配置这些参数,可以确保单片机与无线射频模块之间的通信能够正常进行。
七、通信安全性与稳定性在单片机与无线射频模块的通信中,保证通信的安全性和稳定性至关重要。
常见的安全措施包括数据加密、认证机制和信号干扰抑制等。
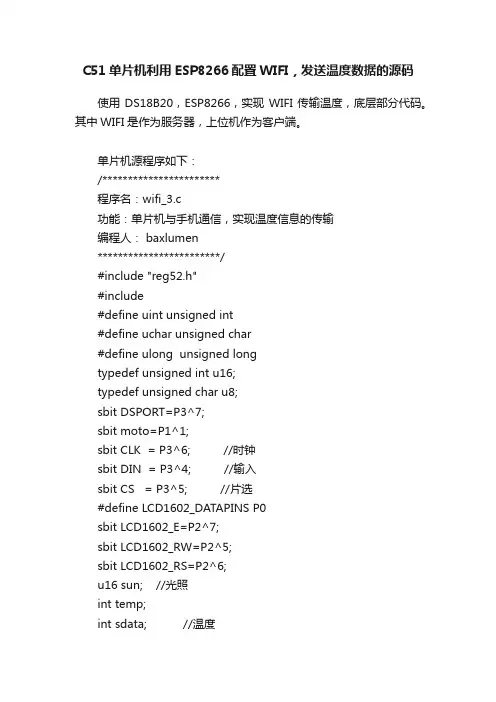
C51单片机利用ESP8266配置WIFI,发送温度数据的源码使用DS18B20,ESP8266,实现WIFI传输温度,底层部分代码。
其中WIFI是作为服务器,上位机作为客户端。
单片机源程序如下:/***********************程序名:wifi_3.c功能:单片机与手机通信,实现温度信息的传输编程人: baxlumen************************/#include "reg52.h"#include#define uint unsigned int#define uchar unsigned char#define ulong unsigned longtypedef unsigned int u16;typedef unsigned char u8;sbit DSPORT=P3^7;sbit moto=P1^1;sbit CLK = P3^6; //时钟sbit DIN = P3^4; //输入sbit CS = P3^5; //片选#define LCD1602_DATAPINS P0sbit LCD1602_E=P2^7;sbit LCD1602_RW=P2^5;sbit LCD1602_RS=P2^6;u16 sun; //光照int temp;int sdata; //温度int xiaoshu1;int xiaoshu2;float tp;uchar DisplayData[]={0,0,0,0,0,0,0,0};/*****************定义程序中所需要的延时********************/void Delay1ms(uint y){uint x;for( ; y>0; y--){for(x=110; x>0; x--);}}void delay(u16 i){while(i--);}void delay1ms(){unsigned char i;for(i=124;i>0;i--); //延时124*8+10=1002us}/************************************************************** ****************** 函数名 : Lcd1602_Delay1ms* 函数功能 : 延时函数,延时1ms* 输入 : c* 输出 : 无* 说名 : 该函数是在12MHZ晶振下,12分频单片机的延时。
基于STC89C52RC的ESP8266WIFI模块调试源码#include <reg52.h>#include <stdio.h>#define DATALEN 1024unsigned char wifi_init_8266[] = "AT+RST"; // 重启8266模块的指令unsigned char wifi_sendcmd_8266[] = "AT"; // 向8266发送AT指令的指令unsigned char wifi_mode[] = "AT+CWMODE=1"; // 设置8266模块为STA模式unsigned char wifi_join[] = "AT+CWJAP=\"SSID\",\"PASSWORD\""; // 连接WiFi网络的指令unsigned char wifi_send[] = "AT+CIPSEND=4"; // 发送数据(4表示发送数据长度为4字节)unsigned char wifi_data[] = "1234"; // 待发送的数据unsigned char ESP8266_ReceiveData[DATALEN]; // 接收8266返回的数据void ESP8266_Initunsigned int DelayNum;for (DelayNum = 0; DelayNum < 0xffff; DelayNum++);//延时一段时间,等待8266模块启动//重启8266模块UART_SendRawString(wifi_init_8266);//等待8266模块返回响应,成功返回“ready”while (!UART_CheckReceiveString("ready")) ;//发送指令,向8266发送AT指令UART_SendRawString(wifi_sendcmd_8266);//等待8266模块返回响应,成功返回“OK”while (!UART_CheckReceiveString("OK"));//设置模式为STA模式UART_SendRawString(wifi_mode);//等待8266模块返回响应,成功返回“OK”while (!UART_CheckReceiveString("OK"));//连接WiFi网络UART_SendRawString(wifi_join);//等待8266模块返回响应,成功返回“OK”while (!UART_CheckReceiveString("OK"));void ESP8266_SendData//发送数据的格式为:“AT+CIPSEND=4\r\n1234”(\r\n为回车换行符)UART_SendRawString(wifi_send);UART_SendRawString(wifi_data);//等待8266模块返回响应,成功返回“SENDOK”while (!UART_CheckReceiveString("SEND OK"));void UART_SendRawString(unsigned char *str)unsigned int i;for (i = 0; str[i] != '\0'; i++)SBUF = str[i];while (!TI)TI=0;}int UART_CheckReceiveString(unsigned char *str)unsigned int i;for (i = 0; str[i] != '\0'; i++)if (SBUF != str[i])return 0;while (!RI)RI=0;}return 1;void UART_ReceiveInterrupt( interrupt 4if (RI == 1)RI=0;ESP8266_ReceiveData[ESP8266_ReceiveCount] = SBUF;ESP8266_ReceiveCount++;}void mainESP8266_Init(; // 初始化ESP8266模块ESP8266_SendData(; // 发送数据以上是基于STC89C52RC的ESP8266WIFI模块调试的源码。
c语言wifi原理C语言WiFi原理一、引言随着无线网络技术的普及和发展,WiFi已经成为人们生活中不可或缺的一部分。
而C语言作为一种高效、灵活的编程语言,也可以用于实现WiFi功能。
本文将介绍C语言下的WiFi原理及其实现方法。
二、WiFi原理概述WiFi(Wireless Fidelity)是一种无线网络技术,它使用无线电波进行数据传输。
WiFi使用的是IEEE 802.11协议,该协议定义了无线网络的物理层和数据链路层。
在WiFi通信中,无线路由器充当基站,负责发射和接收无线信号。
而设备(如电脑、手机等)通过无线网卡接收无线信号,并将其转换为可识别的数据。
C语言可以通过操作无线网卡的驱动程序来实现WiFi功能。
三、C语言下的WiFi实现方法1. 打开网卡在C语言中,可以通过调用操作系统提供的API函数来打开网卡。
打开网卡后,可以进行后续的WiFi功能设置和数据传输操作。
2. 扫描WiFi网络通过调用相关API函数,可以扫描可用的WiFi网络。
扫描结果将包含网络的SSID(网络名称)、信号强度等信息。
3. 连接WiFi网络选择要连接的WiFi网络后,可以通过调用API函数来连接该网络。
连接时需要提供WiFi网络的SSID和密码等信息。
连接成功后,设备将与WiFi网络建立起通信。
4. 数据传输连接成功后,可以使用C语言进行数据传输。
通过调用API函数,可以发送和接收数据,实现与其他设备的通信。
四、C语言下的WiFi编程示例下面是一个简单的C语言程序示例,用于实现WiFi连接并发送数据的功能:```#include <stdio.h>#include <stdlib.h>#include <string.h>// 打开网卡void openWifiCard() {// 调用操作系统的API函数打开网卡// ...printf("网卡已打开\n");}// 扫描WiFi网络void scanWifiNetwork() {// 调用操作系统的API函数扫描WiFi网络// ...printf("扫描到以下WiFi网络:\n");printf("1. WiFi1\n");printf("2. WiFi2\n");printf("3. WiFi3\n");}// 连接WiFi网络void connectWifiNetwork(char* ssid, char* password) { // 调用操作系统的API函数连接指定的WiFi网络// ...printf("成功连接到WiFi网络:%s\n", ssid);}// 发送数据void sendData(char* data) {// 调用操作系统的API函数发送数据// ...printf("已发送数据:%s\n", data);}int main() {openWifiCard();scanWifiNetwork();connectWifiNetwork("WiFi1", "password");sendData("Hello, WiFi!");return 0;}```以上示例代码演示了如何使用C语言实现WiFi连接和数据传输。
基于STM32传输层子系统的无线数据传输设计殷万君;熊建云【摘要】针对目前智慧城市的建设,依靠物联网思维,设计一套智慧城市系统,使得人们能够感受到电子技术带给我们的便捷.本文以传输层为突破口,给出了该层的设计方法,实现了感知层各种ZigBee节点的网络接入、传感参数采集、设备运行状态控制等功能.%In the view of the current wisdom of the city's construction ,a set of smart city system is designed ,which is based on the think-ing of IoT ,so that the people can feel the convenience of electronic technology .In this paper ,the design takes the transmission layer as a breakthrough ,the method of this layer is given .The design realizes the methods of network access of ZigBee nodes of the sensing layer , sensing parameter acquisition ,equipment operating state control .【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2017(017)003【总页数】4页(P32-35)【关键词】STM32;传输层;ZigBee;无线数据传输【作者】殷万君;熊建云【作者单位】四川信息职业技术学院 ,广元628040;四川信息职业技术学院 ,广元628040【正文语种】中文【中图分类】TN401智慧城市是一项复杂的系统工程,传输层在此系统中扮演着重要角色,利用STM32、WiFi通信模块和基于CC2530的ZigBee Sink节点[1],开发出ZigBee-WiFi无线传感器网络网关,实现感知层ZigBee节点的分布式树状网动态组网,实时采集、传输有关数据就显得非常重要[2]。
基于单片机控制的WIFI无线传输模块设计随着物联网和智能家居的发展,无线传输模块的需求越来越大,尤其是具备WIFI功能的无线传输模块。
本文将介绍一种基于单片机控制的WIFI无线传输模块的设计。
首先,我们需要选择一个适合的单片机作为控制核心。
常见的选择有Arduino、Raspberry Pi等。
这里我们选择Arduino作为控制核心,因为它具备易上手、低功耗等特点。
接下来,我们需要选择一个适合的WIFI模块。
常见的选择有ESP8266、ESP32等。
这里我们选择ESP8266作为WIFI模块,因为它具备低功耗、价格便宜等特点。
在硬件设计方面,我们需要将单片机与WIFI模块进行连接。
首先,将单片机的RX引脚连接到WIFI模块的TX引脚,将单片机的TX引脚连接到WIFI模块的RX引脚。
接下来,将单片机的VCC引脚连接到WIFI模块的VCC引脚,将单片机的GND引脚连接到WIFI模块的GND引脚。
在软件设计方面,我们需要编写程序将单片机与WIFI模块进行通信。
首先,我们需要初始化单片机和WIFI模块的串口通信参数,如波特率、数据位、停止位等。
然后,我们可以使用单片机的串口发送AT指令给WIFI模块,实现无线传输功能。
常用的AT指令有连接WIFI网络、断开WIFI网络、发送数据等。
由于字数限制的原因,无法详细展开所有的设计细节。
但是希望通过以上的描述,能够给读者提供一个初步的了解和思路,方便进一步深入学习和实践。
总之,基于单片机控制的WIFI无线传输模块的设计是一个相对较复杂的工程,需要综合考虑硬件设计和软件编程等多方面因素。
然而,一旦成功设计和实现,它将具备广泛的应用前景,可以用于物联网、智能家居、智能农业等领域,为人们的生活带来更多的便利和舒适。
基于单片机Wifi无线通信方案
基于单片机的Wifi无线通信方案可以使用以下组件和步骤:
组件:
1. 单片机:可选择常见的Arduino、ESP8266或ESP32等。
2. Wifi模块:与单片机兼容的Wifi模块,比如ESP8266
或ESP32自带的Wifi功能。
3. 电源模块:为单片机和Wifi模块提供电源,例如使用电池或接口稳压模块。
4. 存储模块(可选):如需要保存或传输大量数据,可以
使用MicroSD卡或其他储存器。
步骤:
1. 准备开发环境:安装Arduino IDE或其他适用于你选择的单片机的开发环境。
2. 硬件连接:将单片机和Wifi模块连接在一起,根据硬件规格连好电源线和串口线。
3. 编写代码:使用单片机的开发工具编写代码,使其能够通过Wifi模块与其他设备进行通信。
4. 配置Wifi:设置Wifi模块与你的无线网络进行连接,指定IP地址、网络名称、密码等。
5. 实现通信协议:定义数据传输的格式和通信协议,例如使用TCP或UDP传输数据包。
6. 完成通信功能:编写程序使单片机能够通过Wifi模块与其他设备进行数据传输或接收。
需要注意的是,具体的实现步骤和代码会根据你选择的单片机和Wifi模块有所不同,请参考相关的开发文档和资源进行具体操作。
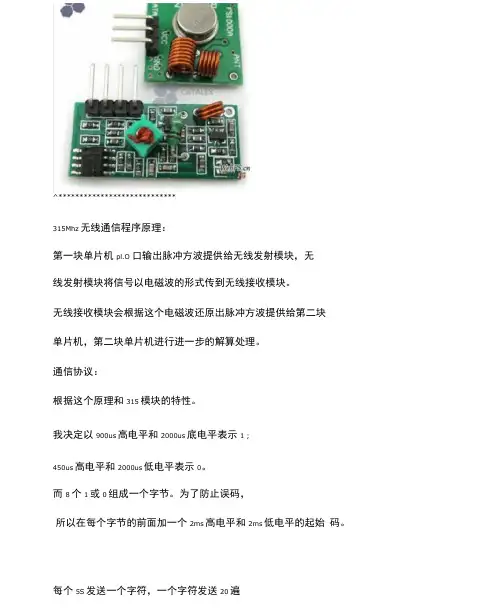
^****************************315Mhz无线通信程序原理:第一块单片机pl.O 口输出脉冲方波提供给无线发射模块,无线发射模块将信号以电磁波的形式传到无线接收模块。
无线接收模块会根据这个电磁波还原出脉冲方波提供给第二块单片机,第二块单片机进行进一步的解算处理。
通信协议:根据这个原理和315模块的特性。
我决定以900us高电平和2000us底电平表示1 ;450us高电平和2000us低电平表示0。
而8个1或0组成一个字节。
为了防止误码,所以在每个字节的前面加一个2ms高电平和2ms低电平的起始码。
每个5S发送一个字符,一个字符发送20遍%A^ >A^ %A^ >A^vl^ /^Tw ^T^yT^ ^T^yr^yt^yr^yj% yr^yj% yr^yj% yj% yj% yj% yj% yj% /{ xLr >±^ vl^ ^2^>X^ vl^ vl^i yr% yr^ yr% yr% yr^ yj^ *r% *r% *r% 彳・"卜315Mhz无线通信程序发送程序11.0592M晶振1机器周期二1.0851US定时器产生2MS定时TH0=0XF8;TLO=OXCD;900us定时THO二OXFC;TLO二0XC3;450us定时THO二OXFE;TLO二0X61;vtx vtx vtx xtx /^T> #T^ #T^>r^ yrs yrs yis^w yrs yrs^w yrs yrs^w /#include<reg52.h>Sinclude "intrins・h"#define uint unsigned int#define uchar unsigned charsbit WXSEND二P「0;uchar timedata[8]二{Oxfe, 0x61, Oxfc, 0xc3, 0xf8, Oxcd, Oxea, 0x66} ;// 450us, 900us, 2MS, 6ms/ >1^/ yj%yj%11.0592MHZ下500毫秒延时,还准vtx vtx vtx xtx vtx /yj% >Jx #y% #y% yj% ^J> ^J> 吩・^J> / void delay500ms(uint i) uint j;uchar k;while (i--){for(j=0;j<750;j++)for(k=0;k<200;k++);}void timeOinit()(TMOD二0x01;//void sendset (uchar senddata) ;// 发送数据程序void sendstartbit () ;//数据发送起始信号2ms高电平和2ms低电平的起始码void sendlowbit() ;// 发送低电平void sendhighbit 0 ;// 发送高电平void main(){uchar senddata, i;timeOinit () ;//定时器初始化senddata二0x55;wh订e(l) {for(i=0;i<20;i++){sendset (senddata) ;// 发送数据程序)delay500ms (10);senddata++;}//发送数据程序void sendset(uchar senddata){uchar i,sendbit;sendstartbit () ;//发送开始信号for(i=0;i<8;i++){sendbit二senddata&0x80;if (sendbit==0) sendlowbit (); // 发送低电平else sendhighbit 0 ;// 发送高电平senddata=senddata<<l;//数据发送起始信号6ms高电平和2ms低电平的起始码void sendstartbit()(WXSEND=1;TH0=timedata[4];TLO二timedata[5];TRO=1;while (TF0==0);TRO二0;TFO二0;TH0=timedata[4];TLO二timedata[5];WXSEND=O;TRO二1;while (TFO==O);TRO二0;TFO=O;void sendlowbit () // 发送低电平WXSEND=1;THO=timedata[O]; TLO 二timeddta[l]; TRO 二1;while (TFO==O);TRO=O;TFO=O;TH0=timedata[4];TLO 二timeddta[5];WXSEND=O;TRO=1;while (TFO==O);TRO=O;TFO=O;WXSEND=1;TH0=timedata[2];TL0=timedata[3];TRO=1;while (TFO==O);TRO=O;TFO 二0; voidsendhighbi t ()//发送高电平TH0=timedata[4];TLO二timedata[5];WXSEND=O;TRO二1;while (TFO==O);TRO=O;TFO二0;315Mhz无线通信程序接收程序U.0592M晶振1机器周期二1.0851US用中断0边沿触发中断,开启接收程序由于接收模块平时大部分时间是低电平,有信号时是高电平,而中断以,°是负边沿触发,所硕件电路中接收模块的信号输出端经过非门后接到单片机P3. 2接收到数据,用串口传到上位机的串口调试软件显示#include<reg52.h>#include 〃inttins. h〃#define uint unsigned intSdefine uchar unsigned char sbit WXrecep=P3^2;//uchar code timedata[6]二{Oxfe, 0x61, Oxfc, 0xc3, Oxf&Oxcd};// 450us,900us, 2MS uchar wxrecepda;void timeOinit ()(TMOD二0x21;// 定时器0THO=O;TLO=O;//TM0D=0x20:/*TMOD:timer1, mode2, 8-bitreload*/TH1二OxFD;/*THl 11.0592MHz*/TL1=OXFD;EA=1;EXO=1;ETO=1;IE0=0;void uartinit()(SCON二0x50;/*SCON:模式1, 8-bitUART,使能接收 */ TR1=1;/*TR1:timerlrun*/void receivewxO ;// 接收子程序void main()timeOinit () ;//定时器初始化uartinit ();wh订e(l);void receivewx ()// 接收子程疗;{uint i;uchar j, recedata;while(WXrecep—0);TRO=O;i二TH0*256+TL0;THO=O;TLO=O;if((i>=1800)&&(i〈二1890)){ recedata二0;for(j=0;j<8;j++){while (WXrecep— 1);TRO二1;while(WXrecep—0);TRO二0;i二TH0*256+TL0;if ((i>二390)&&(iO450)) recedata=recedata&Oxfe;else if ((i>=800)&&(i<=860)) recedata=recedata 0x01;recedata二:recedata〈〈l;TH0=0;TL0=0;}wxrecepda=recedata»l ;SBUF=wxrecepda;while(TI==0);TI=0;}void wxrecint() interrupt 0(THO=O;TLO=O;TRO=1;EXO=O;receivewx ();EXO=1;。
8266at指令代码8266AT指令是一种常用于控制和配置ESP8266模块的命令集。
通过发送AT指令,可以实现与ESP8266模块的通信和控制,从而实现对WiFi网络的连接、数据传输等功能。
本文将以人类的视角,介绍一些常用的8266AT指令,并结合个人经历,描述使用这些指令的实际场景。
第一部分:连接WiFi网络在日常生活中,我们经常需要连接到WiFi网络上,以便享受互联网的便利。
而8266AT指令可以帮助我们实现这个目标。
通过发送AT+CWLAP指令,我们可以搜索并列出周围的WiFi网络列表。
然后,通过AT+CWJAP指令,我们可以选择并连接到我们想要的网络。
我还记得有一次,我在一家咖啡馆里,想要连接上他们的WiFi网络。
我打开串口终端,输入了AT+CWLAP指令,看到了周围的网络列表。
然后,我通过AT+CWJAP指令,输入了WiFi的名称和密码,成功地连接上了网络。
这让我能够轻松地上网冲浪,同时享受美味的咖啡。
第二部分:发送和接收数据除了连接WiFi网络,8266AT指令还可以用于发送和接收数据。
通过AT+CIPSTART指令,我们可以建立与远程服务器的TCP连接。
然后,通过AT+CIPSEND指令,我们可以发送数据给服务器。
这对于远程监控、物联网等应用非常有用。
有一次,我正在开发一个智能家居系统,我需要将传感器的数据发送到远程服务器进行处理。
我使用了AT+CIPSTART指令,成功地建立了与服务器的连接。
然后,我使用AT+CIPSEND指令,将传感器数据发送给服务器。
通过这种方式,我能够实时地监控家中的温度、湿度等信息,并进行相应的控制。
第三部分:配置模块参数除了连接WiFi和发送数据,8266AT指令还可以用于配置ESP8266模块的各种参数。
通过AT+CWMODE指令,我们可以设置模块的工作模式,如STA模式、AP模式等。
通过AT+CWJAP_CUR指令,我们可以设置模块的默认连接WiFi网络。
目录第一章阶段任务第二章基于WIFI模块的无线数据传输的原理1.1 时钟模块1.2 最小单片机系统的原理1.3 温度传感器DS18B201.4 串口1.5 WIFI模块第三章基于WIFI模块的无线数据传输的实现2.1 WIFI模块设置2.2 串口部分设置2.3 调试与运行过程第四章程序与框图第五章小结第二章基于WIFI模块的无线数据传输的原理1.1时钟DS1302模块:电路原理图:DS1302与单片机的连接也仅需要3条线:CE引脚、SCLK串行时钟引脚、I/O 串行数据引脚,Vcc2为备用电源,外接32.768kHz晶振,为芯片提供计时脉冲。
读写时序说明:DS1302是SPI总线驱动方式。
它不仅要向寄存器写入控制字,还需要读取相应寄存器的数据。
控制字总是从最低位开始输出。
在控制字指令输入后的下一个SCLK时钟的上升沿时,数据被写入DS1302,数据输入从最低位(0位)开始。
同样,在紧跟8位的控制字指令后的下一个SCLK脉冲的下降沿,读出DS1302的数据,读出的数据也是从最低位到最高位。
数据读写时序如图1.2单片机最小系统的原理:说明复位电路:由电容串联电阻构成,由图并结合"电容电压不能突变"的性质,可以知道,当系统一上电,RST脚将会出现高电平,并且,这个高电平持续的时间由电路的RC值来决定.典型的51单片机当RST脚的高电平持续两个机器周期以上就将复位,所以,适当组合RC的取值就可以保证可靠的复位.晶振电路:典型的晶振取11.0592MHz(因为可以准确地得到9600波特率和19200波特率,用于有串口通讯的场合)/12MHz(产生精确的uS级时歇,方便定时操作)单片机:一片AT89S51/52或其他51系列兼容单片机特别注意:对于31脚(EA/Vpp),当接高电平时,单片机在复位后从内部ROM的0000H开始执行;当接低电平时,复位后直接从外部ROM的0000H开始执行.1.3温度传感器DS18B20的原理(连接到单片机最小系统,并将温度发送给WIFI模块):3.1.1 DS18B20性能特点(1) 独特的单线接口方式,只需一个接口引脚即可通信;(2) 每一个DS18B20都有一个唯一的64位ROM 序列码; (3) 在使用中不需要任何外围元件;(4) 可用数据线供电,电压范围:+3.0V-+5.5 V ;(5) 测温范围:-55℃ -+125℃,在-10℃-+85℃范围内精度为+0.5℃,分辨率为0.0625℃; (6) 通过编程可实现9-12位的数字读数方式。
基于单片机控制的WIFI无线传输模块设计WIFI无线传输模块是一种可以实现无线通信的装置,通过无线网络与其他设备进行数据传输。
在基于单片机控制的设计方案中,我们可以利用单片机来实现对WIFI模块的控制和数据处理。
首先,我们需要选择合适的WIFI模块。
常见的WIFI模块有ESP8266、ESP32等,这些模块都具备较强的无线通信能力和低功耗特性。
我们可以根据项目需求选择合适的模块。
接下来,我们需要将WIFI模块与单片机进行连接。
一般情况下,WIFI模块通过串口与单片机进行通信。
我们可以通过将单片机的TX引脚连接到WIFI模块的RX引脚,并将单片机的RX引脚连接到WIFI模块的TX引脚,实现双向通信。
在单片机程序的设计中,我们需要编写相应的驱动程序来控制WIFI模块。
首先,我们需要初始化WIFI模块的串口通信设置,如波特率、数据位、停止位等。
然后,我们可以通过向WIFI模块发送特定的AT指令来进行控制和配置。
例如,可以通过AT指令连接到WIFI网络、获取本地IP地址、发送数据等。
在驱动程序中,我们还可以定义一些函数来简化AT指令的发送和接收,使控制更加方便。
另外,在设计中我们需要注意WIFI模块的电源供应。
一般情况下,WIFI模块需要3.3V的电压供应,而单片机输出的IO信号一般为5V。
因此,我们需要使用逻辑电平转换器将单片机的IO信号转换为3.3V,以兼容WIFI模块的工作电压。
在实际应用中,我们可以根据项目需求设计不同的功能。
例如,我们可以设计一个远程控制系统,通过WIFI无线传输模块将用户的控制指令发送到被控制的设备上。
我们可以通过配置WIFI模块为TCP服务器,在单片机程序中监听特定的端口,接收来自用户的控制指令,并执行相应的操作。
总结起来,基于单片机控制的WIFI无线传输模块设计涉及到WIFI模块的选择、与单片机的连接、驱动程序编写、逻辑电平转换等方面。
通过合理的设计和编程,可以实现WIFI模块与单片机的无线通信和数据传输。
基于单片机Wifi无线通信方案1. 引言随着物联网技术的快速发展,无线通信在各个领域得到广泛应用。
而在嵌入式系统中,单片机作为核心控制器,通过无线通信模块实现与外部设备的数据传输。
本文将探讨基于单片机的Wifi无线通信方案,并介绍其原理、实现步骤和应用场景。
2. 方案原理2.1 Wifi技术简介Wifi是一种无线局域网技术,基于IEEE 802.11系列协议。
通过Wifi技术,可以实现设备之间的无线数据传输,具有速度快、覆盖范围广、安全性高等优点,因此广泛应用于无线通信领域。
2.2 单片机与Wifi模块的连接为了实现基于单片机的Wifi无线通信,需要将单片机与Wifi模块进行连接。
一般情况下,可以通过串口或SPI接口与Wifi模块通信。
在连接时,需要根据Wifi模块的规格和引脚定义,正确连接相应的引脚。
2.3 通信协议Wifi无线通信需要使用一定的通信协议来实现数据的传输。
常见的通信协议有TCP/IP和UDP。
TCP/IP协议可确保数据传输的可靠性,而UDP协议则更适合传输效率较高的数据。
3. 实现步骤3.1 硬件连接首先,根据Wifi模块的规格和引脚定义,连接单片机和Wifi模块的相应引脚。
一般情况下,需要连接供电引脚、地线、串口或SPI接口等。
3.2 编写驱动程序根据使用的单片机型号和Wifi模块型号,编写相应的驱动程序。
驱动程序包括初始化Wifi模块、配置网络参数、发送和接收数据等功能。
3.3 客户端程序开发在单片机端,开发相应的客户端程序,用于发送和接收数据。
根据通信协议的要求,将待发送的数据进行封包,发送到目标设备。
同时,接收来自目标设备的数据,并进行解包处理。
3.4 服务器程序开发在目标设备的服务端,开发相应的服务器程序,用于接收来自单片机的数据,并处理响应。
根据通信协议的要求,解析接收到的数据,并进行相应的操作。
4. 应用场景基于单片机的Wifi无线通信方案在各个领域都有广泛应用,特别是物联网领域。
单片机与pc机wifi通讯阐明单片机与pc机wifi通讯阐明
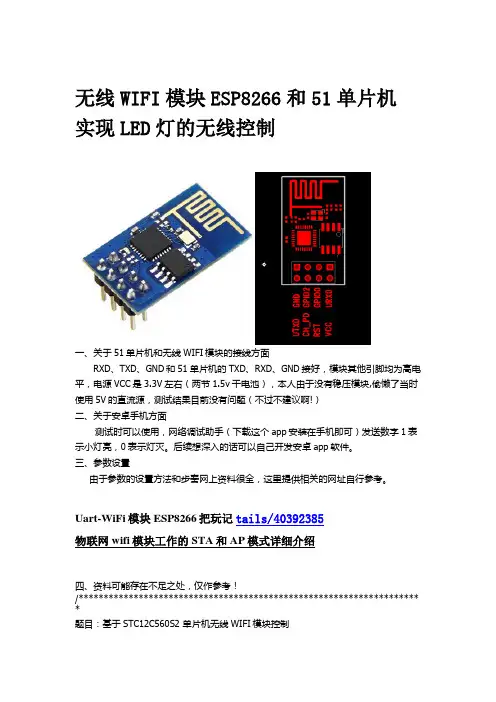
单片机+wifi模组,Wifi模块为串口或TTL电平转WIFI通讯的一种传输改换商品,Uart-Wifi模块是依据Uart接口的契合wifi无线网络规范的嵌入式模块,内置无线网络协议IEEE802.11协议栈以及TCP/IP协议栈,能够结束用户串口或TTL电平数据到无线网络之间的改换。
能够挑选wifi、蓝牙或无线模块几种方案,wifi和蓝牙通讯就搞一个uart转wifi或uart转蓝牙模块,经过51单片机的串口发送接纳数据就能够,PC端也要数据发送、接纳处理等。
无线模块的话就把51和pc各接一个无线模块,两头都经过串口通讯。
1。
基于单片机Wifi无线通信方案第一部分:功能介绍通过手机发送指令控制LED亮与灭单片机原理图第二部分:硬件接法1.连接实验相关模块连线如图:JP10(P0)接J12J21跳线帽接左边A✍ P22B✍P23C✍P24J10与J12相连接(即是P0口控制LED)单片机与ESP8266连接:由于单片机的串口通常配置成9600,而ESP8266初始的波特率为115200,所以先用PC通过PL2303去配置ESP8266模块的波特率为9600ESP8266图示PL2303图示PC与ESP8266通过PL2303连接PL2303绿线-----------ESP8266的URXD脚PL2303白线-----------ESP8266的UTXD 脚注意:用PC机上的串口助手测试时,由于ESP8266的电源是3.3V,所以先要把开发板的电源配置成3.3V ,如下图J-PWR,跳线冒连接3.3V。
PL2303 的电源(红线)不接!ESP8266引脚的VCC和CH_PD连接开发板JPWR的vcc两个脚,ESP8266的地与PL2306的地连接开发板JPWR的GND两个脚(共地)!!!!!!在PC上打开软件sscom42.exe,界面如下:注意:发送新行选择上,波特率默认为115200,8,1,None串口号选择PL2303的COM口(查看设备管理器)打开串口即可测试(软件的发送新行要打勾)第一步:配置波特率然后在字符串输入框中输入:AT+UART=9600,8,1,0,0发送给ESP8266 ,若返回OK,表示成功(注意最后一位不要选择流控)第二步:ESP8266配置AP的SSID和密码然后在字符串输入框中输入:AT+CWSAP="ESP8266-gigi注意:操作第二步时,要把串口软件的波特率设置成9600。
设置成功后,可以利用PC上的无线网卡去连接到此,ESP8266配置完成,然后下载单片机程序,此时要单片机的电源重新换成5V!注意:单片机下载程序需要5V,运行时可以为3.3V。
⼿机是怎样通过wifi模块和单⽚机通信的呢?⼿机通过Wifi模块和单⽚机通信的⽅式有直接连接通信、组成局域⽹、通过云服务器中转三种单⽚机⼀般是通过UART接⼝与Wifi模块连接,单⽚机可以给Wifi模块发送AT指令,让Wifi模块设置为AP Mode或者Stattion Mode。
⼿机直接Wifi模块直接通信⼿机和Wifi模块需要在⽐较近的距离,两者需要在通讯范围之内,就好⽐⼿机和Wifi连接⼀样。
单⽚机通过AT指令把Wifi模块设置为AP Mode,这样Wifi模块就好⽐⼀个热点,⼿机可以直接连接到Wifi模块。
这样⼿机就可以通过Wifi模块与单⽚机进⾏通讯了。
⼿机和Wifi模块通过路幅器组成局域⽹进⾏通讯⼿机和Wifi模需要连接到同⼀个路由器。
在同⼀个局域⽹内,就好⽐局域⽹内的两个电脑也是可以互相通讯的。
单⽚机通过AT指令把Wifi模块设置为Stattion Mode,并把⽆线路由器Wifi的SSID 和密码写⼊到Wifi模块。
⼿机也连接到相同的路由器Wifi。
这样两者就可以通过TCP/IP协议进⾏通讯了。
⼿机通过云服务器与Wifi模块通讯通过云服务器中转后,⼿机和Wifi模块就算“远隔千⾥”都可以进⾏通讯,当然两者都需要接⼊到互联⽹才⾏。
单⽚机通过AT指令把Wifi模块设置为Stattion Mode,并把在连接范围内的Wifi的SSID 和密码写⼊到Wifi模块,这样Wifi模块就可以连接到互联⽹了。
单⽚机还需要给Wifi模块发送指令,让Wifi模块连接到指定的云服务器。
当然⼿机也需要连接云服务器,通过云服务器,⼿机和Wifi模块就可以交互通讯了。
工业大学计算机科学与技术学院Project3课程设计2014-2015学年第二学期班级:浦电子1203组员:组员学号:指导老师:武晓光,胡方强,包亚萍袁建华,毛钱萍2015年7月8日目录第一章阶段任务第二章基于WIFI模块的无线数据传输的原理1.1 时钟模块1.2 最小单片机系统的原理1.3 温度传感器DS18B201.4 串口1.5 WIFI模块第三章基于WIFI模块的无线数据传输的实现2.1 WIFI模块设置2.2 串口部分设置2.3 调试与运行过程第四章程序与框图第五章小结第一章阶段任务:第四阶段:2天(2天)写报告第二章基于WIFI模块的无线数据传输的原理1.1时钟DS1302模块:电路原理图:DS1302与单片机的连接也仅需要3条线:CE引脚、SCLK串行时钟引脚、I/O 串行数据引脚,Vcc2为备用电源,外接32.768kHz晶振,为芯片提供计时脉冲。
读写时序说明:DS1302是SPI总线驱动方式。
它不仅要向寄存器写入控制字,还需要读取相应寄存器的数据。
控制字总是从最低位开始输出。
在控制字指令输入后的下一个SCLK时钟的上升沿时,数据被写入DS1302,数据输入从最低位(0位)开始。
同样,在紧跟8位的控制字指令后的下一个SCLK脉冲的下降沿,读出DS1302的数据,读出的数据也是从最低位到最高位。
数据读写时序如图1.2单片机最小系统的原理:说明复位电路:由电容串联电阻构成,由图并结合"电容电压不能突变"的性质,可以知道,当系统一上电,RST脚将会出现高电平,并且,这个高电平持续的时间由电路的RC值来决定.典型的51单片机当RST脚的高电平持续两个机器周期以上就将复位,所以,适当组合RC的取值就可以保证可靠的复位.晶振电路:典型的晶振取11.0592MHz(因为可以准确地得到9600波特率和19200波特率,用于有串口通讯的场合)/12MHz(产生精确的uS级时歇,方便定时操作)单片机:一片AT89S51/52或其他51系列兼容单片机特别注意:对于31脚(EA/Vpp),当接高电平时,单片机在复位后从部ROM的0000H开始执行;当接低电平时,复位后直接从外部ROM的0000H开始执行.1.3温度传感器DS18B20的原理(连接到单片机最小系统,并将温度发送给WIFI模块):3.1.1 DS18B20性能特点(1) 独特的单线接口方式,只需一个接口引脚即可通信;(2) 每一个DS18B20都有一个唯一的64位ROM序列码;(3) 在使用中不需要任何外围元件;(4) 可用数据线供电,电压围:+3.0V-+5.5 V;(5) 测温围:-55℃ -+125℃,在-10℃-+85℃围精度为+0.5℃,分辨率为0.0625℃;(6) 通过编程可实现9-12位的数字读数方式。
温度转换成12位数字信号所需时间最长为750ms,而在9位分辩模式工作时仅需93.75ms;(7) 用户可自设定非易失性的报警上下限值;(8) 告警搜索命令可识别和定位那些超过报警限值的DS18B20;(9) 多个DS18B20可以并联在惟一的三线上,实现多点测温;(10)电源极性接反时,DS18B20不会因发热而烧毁,但不能正常工作;3.1.2 DS18B20部存储器及温度数据格式对于DS18B20部存储器结构(如图3.1),它包括一个暂存RAM和一个非易失性电可擦除EERAM,后者存放报警上下限TH、TL。
当改变TH、T L中的值时,数据首先被写进暂存器的第二、三字节中,主机可再读出其中容进行验证。
如果正确,当主机发送复制暂存器命令,暂存器的第二、三字节将被复制到TH、TL中,这样处理有利于确保该数据在单总线上传输的完整性[7]。
暂存器结构 EERAM结构图3.1 DS18B20结构框图暂存存储器作用是在单线通信时确保数据的完整性,它由8字节组成,头两个字节表示测得的温度读数。
以12位转化为例说明温度高低字节存放形式(温度的存储形式如表3.1)及计算:12位转化后得到的12位数据,存储在18B20的两个高低8位的RAM中,二进制中的前面5位是符号位。
如果测得的温度大于0,这5位为0,只要将测到的数值乘于0.0625即可得到实际温度;如果温度小于0,这5位为1,测到的数值需要取反加1,再乘于0.0625才能得到实际温度[8]。
表3.1 温度的存储形式S=1时表示温度为负,S=0时表示温度为正,其余低位以二进制补码形式表示,最低位为1时表示0.0625℃。
温度/数字对应关系如表3.2所示。
表3.2 DS18B20温度/数字对应关系表DS18B20有六条控制命令,如表3.3所示:表3.3 控制命令写暂存器4EH 将数据写入暂存器的TH、TL字节复制暂存器48H 把暂存器的TH、TL字节写到E2RAM中重新调E2RAM B8H 把E2RAM中的TH、TL字节写到暂存器TH、TL字节读电源供电方式B4H 启动DS18B20发送电源供电方式的信号给主CPU3.1.3 DS18B20操作命令及时序特性DS18B20对读写的数据位有着严格的时序要求,它是在一根I/O线上读写数据的。
同时,DS18B20为了保证各位数据传输的正确性和完整性,它有着严格的通信协议。
DS18B20每一步操作都要遵循严格的工作时序和通信协议,如主机控制DS18B20完成温度转换这一过程,根据DS18B20的通讯协议,须经三个步骤:每一次读写之前都要对DS18B20进行复位,复位成功后发送一条ROM指令,最后发送RAM指令,这样才能对DS18B20进行预定的操作。
该协议定义了几种信号的时序:初始化时序、读时序、写时序。
所有时序都是将主机作为主设备,单总线器件作为从设备。
而每一次命令和数据的传输都是从主机主动启动写时序开始的,如果要单总线器件送回数据,在进行写命令后,主机需启动读时序完成数据的接收。
另外,数据和命令的传输都是低位在先[9]。
(1)DS18B20的复位时序主机控制DS18B20完成任何操作之前必须先初始化,即主机发一复位脉冲(最短为480µs 的低电平),接着主机释放总线进入接收状态,DS18B20在检测到I/0引脚上的上升沿之后,等待15~60µs,然后发出存在脉冲(60~240)µs的低电平。
如图3.2所示。
(2)DS18B20的读时序DS18B20的读时序分为读0时序和读1时序两个过程。
DS18B20的读时序是从主机把单总线拉低后,在15秒之就得释放单总线,从而让DS18B20把数据传输到单总线上。
DS18B20完成一个读时序的过程,至少需要60µs。
如图3.3所示。
图3.2 DS18B20的复位时序图3.3 DS18B20的读时序(3)DS18B20的写时序DS18B20的写时序同读时序一样,仍然分为写0时序和写1时序两个过程。
DS18B20写0时序和写1时序的要求不同,当要写0时序时,单总线要被拉低至少60µs,保证DS18B20能够在15µs到45µs之间能正确地采样I/O总线上的“0”电平,当要写1时序时,单总线被拉低之后,在15µs之就得释放单总线。
如图3.4所示。
图3.4 DS18B20的写时序由DS18B20的通讯协议得知,主机控制DS18B20完成温度转换的过程必须经过三个步骤:每一次读写之前都要对DS18B20进行复位,复位成功后发送一条ROM指令,最后发送RAM指令,从而对DS18B20进行预定的操作。
复位要求主CPU将数据线下拉500µs,然后释放,DS18B20收到信号后等待16~60µs左右,然后发出60~240µs的存在低脉冲,主CPU 收到此信号表示复位成功。
1.4串口部分(让WIFI与电脑,单片机进行通讯)串口原理图:80C51串行口的结构图:80C51串行口的工作方式 : 方式1方式1是10位数据的异步通信口。
TXD 为数据发送引脚,RXD 为数据接收引脚,传送一帧数据的格式如图所示。
其中1位起始位,8位数据位,1位停止位。
1、方式1输出D0 D1 D2 D3 D4 D5 D6 D7写入SBUF 停止位TXDTI(中断标志)起始方式1输入D0 D1 D2 D3 D4 D5 D6 D7停止位RXD RI(中断标志)起始位采样脉冲用软件置REN 为1时,接收器以所选择波特率的16倍速率采样RXD 引脚电平,检测到RXD 引脚输入电平发生负跳变时,则说明起始位有效,将其移入输入移位寄存器,并开始接收这一帧信息的其余位。
接收过程中,数据从输入移位寄存器右边移入,起始位移至输入移位寄存器最左边时,控制电路进行最后一次移位。
当RI=0,且SM2=0(或接收到的停止位为1)时,将接收到的9位数据的前8位数据装入接收SBUF ,第9位(停止位)进入RB8,并置RI=1,向CPU 请求中断始位1位,数据9位(含1位附加的第9位,发送时为SCON 中的TB8,接收时为RB8),停止位1位,一帧数据为11位。
方式2的波特率固定为晶振频率的1/64或1/32,方式3的波特率由定时器T1的溢出率决定。
1.5WIFI 模块:使用接口:1 电源接口系统采用标准电源插座,外径5.5mm径2.1mm的标准尺寸,正外负,输入电压围5~48V,电流350mA2 指示灯ID 名称描述1 Power 设备供电后亮2 Ready 部Linux系统启动完成后亮3 Link 网络连接建立后亮4 RXD 本设备的串口收到数据闪烁5 TXD 本设备通过串口向外发送数据时闪烁设备的串口为公口(针),RS232 电平(可以直接连电脑串口的电平),引脚顺序与计算机的COM 口保持一致,与电脑连接时需要用交叉线(2-3 交叉,7-8 交叉,5-5 直连,7-8 可以不接但是一定不能直连电脑,否则可能导致工作不正常),一共有6 根线有定义,其余悬空。
序号名称描述2 RXD 设备数据接收引脚3 TXD 设备数据发送引脚5 GND 信号地8RTS 请求发送8CTS 清除发送9VCC 默认未使用,PCB 上有个焊盘跳线,需要时可以将它与设备的电源输入正极连接,用于给串口传感器供电或者外部通过串口线给设备供电。
第三章基于WiFi模块的无线传输的实现2.1 WIFI模块的设置2.2串口部分设置2.3调试:运行过程:单片机首先运行,然后对DS18B20和DS1302,LCD1602进行初始化,接着对DS18B20和DS1302进行写设置,读取温度和时间,单片机处理数据,将其在LCD1602上显示,单片机进行串口初始化并通过串口程序将温度和时间准备好,等到串口接收到相应的信号,在发送数据。
在程序检测温度,若温度超过设定的值(值可通过终端修改),将发出报警信号。