气动基本回路
- 格式:ppt
- 大小:872.00 KB
- 文档页数:57


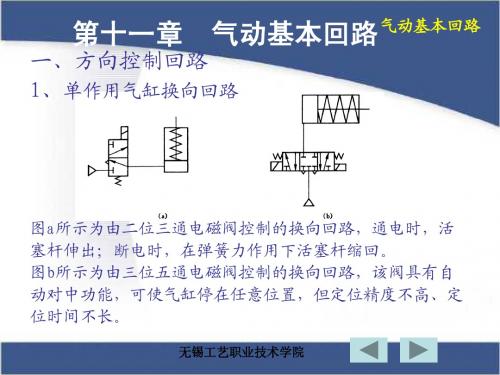



1.1 换向回路单作用气缸控制回路气缸活塞杆运动的一个方向靠压缩空气驱动,另一个方向则靠其他外力,如重力、弹簧力等驱动。
回路简单,可选用简单结构的二位三通阀来控制常断二位三通电磁阀控制回路通电时活塞杆伸出,断电时靠弹簧力返回常通二位三通电磁阀控制回路断电时活塞杆缩回,通电时靠弹簧力返回三位三通电磁阀控制回路控制气缸的换向阀带有全封闭型中间位置,可使气缸活塞停止在任意位置,但定位精度不高两个二位二通电磁阀代替一个二位三通阀的控制回路两个二位二通电磁阀同时通电换向,可使活塞杆伸出。
断电后,靠外力返回双作用气缸控制回气缸活塞杆伸出或缩回两个方向的运动都靠压缩空气驱动,通常选用二位五通阀来控制采用单电控二位五通阀的控制回路双电控阀控制回路采用双电控电中间封闭型三位五通阀控制回路中间排气型三位五通阀控制回路路通电时活塞杆伸出,断电时活塞杆返回磁阀,换向信号可以为短脉冲信号,因此电磁铁发热少,并具有断电保持功能左侧电磁铁通电时,活塞杆伸出。
右侧电磁铁通电时,活塞杆缩回。
左、右两侧电磁铁同时断电时,活塞可停止在任意位置,但定位精度不高当电磁阀处于中间位置时活塞杆处于自由状态,可由其他机构驱动中间加压型三位阀控制回路电磁远程控制回路采用二位五通气控阀作为主控阀,其先导控制压力用一个二位三通电磁阀进行远程控制。
该回路可以应用于有防爆等要求的特殊场合双气控阀控制回路主控阀为双气控二位五通阀,用两个二位三通阀作为主控阀的先导阀,可进行遥控操作当左、右两侧电磁铁同时断电时,活塞可停止在任何位置,但定位精度不高。
采用一个压力控制阀,调节无杆腔的压力,使得在活塞双向加压时,保持力的平衡采用带有双活塞杆的气缸,使活塞两端受压面积相等,当双向加压时,也可保持力的平衡双作用气缸控制回路采用两个二位三通阀的控制回路采用一个二位三通阀的差动回路带有自保回路的气动控制回路两个二位二通阀分别控制气缸运动的二位四(五)通阀和二位二通阀串接的控制回路两个二位三通阀中,一个为常通阀,另一个为常断阀,两个电磁阀同时动作可实现气缸换向气缸右腔始终充满压缩空气,接通电磁阀后,左腔进气,靠压差推动活塞杆伸出,动作比较平稳,断电后,活塞自动复位两个方向。
气动基本回路气动常用回路气动基本回路是指通过气动元件和管路构成的气动系统中的基本回路。
气动常用回路是指在工业自动化控制系统中经常使用的一些气动回路。
本文将介绍气动基本回路和气动常用回路的一些概念和应用。
气动基本回路主要包括气源回路、执行回路和控制回路。
气源回路是指气动系统中提供压缩空气的部分,通常包括压缩空气发生器、气源处理装置和储气设备。
执行回路是指通过气动执行元件来实现机械运动的部分,通常包括气缸和气动执行阀等。
控制回路是指用来控制执行元件的控制系统,通常包括开关、传感器和控制阀等。
气动常用回路包括单向气缸回路、双向气缸回路、速度控制回路、位置控制回路、压力控制回路等。
单向气缸回路是指通过一个气缸来实现单个工作机构的运动控制,常用于一些简单的工作场合。
双向气缸回路是指通过两个气缸来实现工作机构的正反转运动控制,常用于一些需要双向运动的工作场合。
速度控制回路是通过调节气缸的进气量来实现对气缸运动速度的控制,常用于一些对速度要求较高的工作场合。
位置控制回路是通过使用位置传感器来检测工作机构的位置,并通过控制阀来调节气缸的进气量,从而实现对工作机构位置的控制。
压力控制回路是通过使用压力传感器来检测气缸的压力,并通过控制阀来调节气缸的进气量,从而实现对气缸压力的控制。
气动基本回路和气动常用回路在工业自动化控制系统中具有广泛的应用。
其优点包括响应速度快、动力强、结构简单、成本低廉等。
因此,在许多工业领域中,气动系统被广泛应用于各种自动化生产线、机械设备和工艺控制系统中。
气动基本回路和气动常用回路是工业自动化控制系统中常用的回路类型。
通过对气源回路、执行回路和控制回路的合理设计和配置,可以实现对工作机构的运动控制、速度控制、位置控制和压力控制等功能。
气动系统具有快速响应、动力强大、结构简单、成本低廉等优点,因此在工业领域中具有广泛的应用前景。