第二章_计算机控制系统的数学基础.ppt
- 格式:ppt
- 大小:1.12 MB
- 文档页数:30
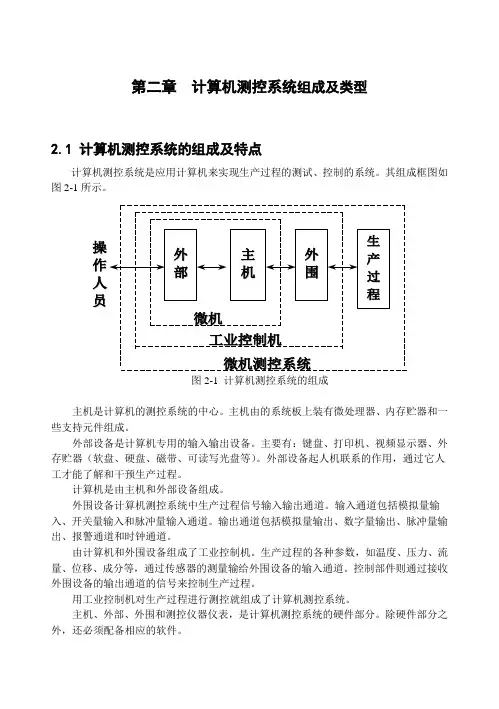
第二章计算机测控系统组成及类型2.1 计算机测控系统的组成及特点计算机测控系统是应用计算机来实现生产过程的测试、控制的系统。
其组成框图如图2-1所示。
操作人员微机测控系统图2-1 计算机测控系统的组成主机是计算机的测控系统的中心。
主机由的系统板上装有微处理器、内存贮器和一些支持元件组成。
外部设备是计算机专用的输入输出设备。
主要有:键盘、打印机、视频显示器、外存贮器(软盘、硬盘、磁带、可读写光盘等)。
外部设备起人机联系的作用,通过它人工才能了解和干预生产过程。
计算机是由主机和外部设备组成。
外围设备计算机测控系统中生产过程信号输入输出通道。
输入通道包括模拟量输入、开关量输入和脉冲量输入通道。
输出通道包括模拟量输出、数字量输出、脉冲量输出、报警通道和时钟通道。
由计算机和外围设备组成了工业控制机。
生产过程的各种参数,如温度、压力、流量、位移、成分等,通过传感器的测量输给外围设备的输入通道。
控制部件则通过接收外围设备的输出通道的信号来控制生产过程。
用工业控制机对生产过程进行测控就组成了计算机测控系统。
主机、外部、外围和测控仪器仪表,是计算机测控系统的硬件部分。
除硬件部分之外,还必须配备相应的软件。
计算机测控系统的软件可分系统软件和应用软件。
系统软件是计算机本身的操作系统和监控程序,它有一定的通用性,由计算机生产厂家提供。
应用软件是实现生产过程测控的应用程序,也称用户程序,它具有专用性,由用户根据具体需要编制。
由常规测控仪器仪表构成的模拟测控系统,虽具有可靠性高、成本低、易于维护操作的优点,但是它难以实现多变量测控、复杂控制规律的控制,如最优控制,自适应控制,时变控制;模拟控制屏越来越长,难以实现集中控制;各分子系统之间不便于进行通讯联系,难以实现多级控制;控制方案的修改比较麻烦。
计算机测控系统则能很好地解决上述问题。
计算机测控系统不仅能完成模拟测控系统的所有功能,而且还具有如下优点:(1)测控的速度和精度高;(2)由于计算机具有分时操作功能,所以一台计算机可以代替多台常规测控装置;(3)由于计算机具有记忆和逻辑判断功能,所以能够综合生产过程各方面的情况,在工艺参数变化时能及时地作出判断,选择最优控制。
第二章 数字控制系统的组成第一节 数字控制系统硬件及软件组成一、 硬件部分计算机控制系统的硬件包括主机、接口电路、过程输入/输出通道、外部设备、操作台等。
1、主机它是过程计算机控制系统的核心,由中央处理器(CPU)和内存储器组成。
主机根据输入通道送来的被控对象的状态参数,按照预先制定的控制算法编好的程序,自动进行信息处理、分析、计算,并作出相应的控制决策,然后通过输出通道发出控制命令,使被控对象按照预定的规律工作。
2、接口电路它是主机与外部设备、输入/输出通道进行信息交换的桥梁。
在过程计算机控制系统中,主机接收数据或者向外发布命令和数据都是通过接口电路进行的,接口电路完成主机与其它设备的协调工作,实现信息的传送。
3、过程输入/输出通道过程输入输出(I/O)通道在微机和生产过程之间起着信号传递与变换的纽带作用,它是主机和被控对象实现信息传送与交换的通道。
模拟量输入通道把反映生产过程或设备工况的模拟信号转换为数字信号送给微机;模拟量输出通道则把微机输出的数字控制信号转换为模拟信号(电压或电流)作用于执行设备,实现生产过程的自动控制。
微机通过开关量(脉冲量、数字量)输入通道输入反映生产过程或设备工况的开关信号(如继电器接点、行程开关、按纽等)或脉冲信号;通过开关量(数字量)输出通道控制那些能接受开关(数字)信号的电器设备。
1)、模拟量输入(AI)通道:生产过程中各种连续的物理量(如温度、流量、压力、液位、位移、速度、电流、电压以及气体或液体的PH值、浓度、浊度等),只要由在线仪表将其转换为相应的标准模拟量电信号,均可送入模拟量输入通道进行处理。
2)、模拟量输出(AO)通道:模拟量输出通道一般是输出4~20mA(或1~5V)的连续的直流电流信号,用来控制各种直行程或角行程电动执行机构的行程,或通过调速装置(如各种变频调速器)控制各种电机的转速,亦可通过电-气转换器或电-液转换器来控制各种气动或液动执行机构,例如控制气动阀门的开度等等。