有限元分析论文
- 格式:doc
- 大小:272.50 KB
- 文档页数:10
风力机叶片的有限元分析学生姓名:1111 专业班级:机械设计制造及其自动化2008级10班指导教师:朱仁胜指导单位:机械与汽车工程学院摘要:通过Solidworks软件对3MW风力机叶片进行建模,然后基于ANSYS 和Workbench分别对其进行模态分析和流固耦合分析,其中流固耦合分析中的结构静力分析部分也使用到了ANSYS Mechanical APDL。
其中模态分析结果表示:叶片的振型以摆振和弯曲为主,其一阶模态频率分别为 0.34Hz,能顺利的避开外在激励频率,避免了共振现象的发生。
流固耦合分析对额定风载进行了数值模拟仿真,通过结构静力分析,对叶片的受力,变形情况有了一个基本的了解,其中叶片在额定风载情况下的最大应力为56MPa,远远低于其实测拉伸强度的720MPa。
在11级风载下的应力云图显示其所受的最大应力为83.8MPa,满足其材料的强度要求。
该分析对进一步的疲劳分析和优化设计等提供了参考和依据。
关键词:叶片建模;模态分析;流固耦合分析;结构静力分析1Abstract:Through the Solidworks software build the blade model which power is 3 MW. Then based on the ANSYS and Workbench software,the analysis of modal and fluid-structure interaction.Andthe Static structural analysis is used the ANSYS Mechanical APDL too.The modal analysisresults show that the vibration modes of this blade are presented as Shimmy and bending,Thefirst modes frequency is 0.34Hz.And it can avoid the external excitation frequencywell,Avoid the resonance phenomenon occurs.The analysis of fluid-structure interaction havedo a numerical simulation about Rated wind load,through the Static structural analysis wehave a basic understanding of the stress and deformation about the blade. And the maximumstress of the blade is 56MPa under the rated wind load.Far lower than the Measured tensilestrength of 720MPa.And under the 11 rating wind load.The stress cloud show that maximumstress is 83.8MPa,Meet the strength of the material requirements.This analysis providesa reference and basis for further fatigue analysis and optimization design.Keywords:Blade modeling;Modal analysis;Fluid-structure interaction analysis;Static structural analysis31 概 述风能是地球表面大量空气流动所产生的动能,风能量具有取之不尽、用之不竭、就地可取、不需运输、广泛分布、不污染环境、不破坏生态、周而复始、可以再生等诸多优点。
基于有限元分析的车用铝合金壳体压铸模具力学性能研究摘要:本论文致力于运用有限元分析这一先进方法,对车用铝合金壳体压铸模具的力学性能进行深入探究。
细致分析了模具在工作时的应力分布情况及可能产生的变形状况等重要方面。
通过详尽的研究,不仅深刻揭示了模具力学性能的内在规律和特点,还为压铸模具的设计与优化提供了可靠的理论依据。
这对提高模具性能、确保产品质量、提升生产效率意义重大,同时也有力地推动了相关领域的技术进步,为行业发展注入了新的活力。
关键词:有限元分析;车用铝合金壳体;压铸模具;力学性能。
一、引言随着现代汽车工业的持续进步和快速发展,车用铝合金壳体在汽车制造中的应用日益广泛。
压铸模具作为生产这些铝合金壳体的至关重要的工具,其力学性能表现直接关系到产品的质量优劣以及生产效率的高低。
可以说,压铸模具的力学性能对于整个生产过程有着举足轻重的影响。
因此,深入开展对压铸模具力学性能的研究,具有极其重要的现实意义和价值。
这不仅有助于提升产品的质量和性能,还能推动汽车工业的进一步发展,满足人们对于汽车安全性、可靠性和舒适性的更高要求。
二、有限元分析方法概述2.1有限元分析的基本原理有限元分析的基本原理是将一个连续的结构体离散为有限个单元,并通过对这些单元进行力学分析来近似模拟整个结构体的行为。
它基于变分原理或加权余量法,将求解区域划分成一系列单元,用节点连接。
在每个单元内,假定未知函数的近似表达式,再根据节点的平衡条件或边界条件建立线性方程组,求解得到节点上的未知量。
通过这种方式,可以得到结构体在不同载荷和边界条件下的力学响应,如位移、应力、应变等。
有限元分析能够较为精确地模拟复杂结构的力学行为,在工程设计和科学研究中得到广泛应用。
2.2压铸模具有限元模型的建立压铸模具有限元模型的构建是一个精细而复杂的过程。
首先,需要获取压铸模具的精确几何模型,可以通过三维建模软件或实际测量等手段来实现。
然后,对几何模型进行必要的处理,包括清理和修复,以去除多余的特征并简化复杂结构,确保模型的准确性和简洁性。
有限元分析课程论文课程名称:有限元分析论文题目:ujoint有限元分析学生班级;学生姓名:任课教师:学位类别:评分标准及分值选题与参阅资料(分值)论文内容(分值)论文表述(分值)创新性(分值)评分论文评语:总评分评阅教师: 评阅时间年月日注:此表为每个学生的论文封面,请任课教师填写分项分值基于abaqus的ujoint有限元分析摘要:万向传动装置在汽车中起到了传递扭矩的关键作用,在abaqus中导入ujoint实体模型,之后对其进行坐标系建立,wire 建立,以及各部件之间的连接关系的建立,最后对该模型施加边界条件,令其运动。
关键词:abaqus、有限元、ujoint一问题的描述对导入的ujoint在所有步骤完成后,施加力:在stepinitial:均设为0;step SPIN:doundary1:限制除UR2的所有,且把UR2值设为:pi。
在boundary2 中,限制UR1和UR3自由度。
二在abaqus中导入ujoint实体模型启动abaqus CAE,在文件下拉菜单中选择:import ,选择最终文件位置or 输入ws_connector_ujoint.py.inp打开文件ujoint。
(如下图所示)2.1 创建坐标系单机操作界面中的tool,从下拉菜单中选择datum,再出来的窗口中选择coordinate,3points。
首先选择origin,在选择x正方向,Y正方向、z正方向。
创建完成。
2.2创建VERT和CROSS之间的2坐标系。
根据 2.1所述操作步骤创建坐标系V-C 和V-G (VERT和GROUND)。
Notice:1、创建过程中为了清晰分辨,可将IN的suppress,创建完成后再将其resume。
其他同样2、在V-C和I-C中,x轴与cross转动所绕轴平行。
根据2.1所属步骤创建I-C 和I-G. 结果如图;2.3 定义connector geometry1. 2.3.1 创建disjoint型wire在选项中选择interaction,在所出现窗口中点击Create Wire Feature tool.,在所出现的窗口中选择Disjointwires,单机添加要成wire的点。
钢箱梁桥面吊装设计与有限元分析摘要:钢箱梁桥面的吊装设计与有限元分析是桥梁工程领域中一个重要且复杂的研究课题。
随着现代桥梁建设的不断发展,吊装技术的应用越来越广泛,钢箱梁桥面的吊装工作也成为施工阶段不可或缺的环节。
因此,开展钢箱梁桥面吊装设计与有限元分析的研究对于确保吊装过程的安全、高效和质量具有重要的背景意义。
本论文旨在研究钢箱梁桥面吊装设计与有限元分析。
本研究对于提高桥梁施工安全性和效率具有重要的指导意义。
关键词:钢箱梁、吊装设计、有限元分析、桥梁施工一、钢箱梁桥面吊装设计的关键步骤1.吊装方案确定在吊装设计之前,需要根据实际情况确定吊装方案。
首先,根据钢箱梁的几何形状和重量,选择适当的吊装设备和工具。
可能的吊装设备包括起重机、吊车、塔吊等。
其次,确定吊装点的位置和数量。
吊装点的选择应考虑到梁体的强度和稳定性,避免对梁体造成过大的变形或损坏。
同时,吊装点的位置应均匀分布,以保证梁体的平衡和稳定性。
最后,确定吊装过程中的安全措施,如设置临时支撑、安全围栏、警示标识等,以确保施工过程的安全。
2.吊装参数计算吊装参数计算是吊装设计的重要步骤。
首先,需要确定吊装点的位置,一般选择位于梁体的强度较高的部位。
然后,进行吊装索的张力计算。
吊装索的张力应根据梁体的重量、几何形状和吊装设备的额定起重能力来确定,以确保吊装过程中的安全性。
此外,还需要计算吊装设备的额定起重能力,确保其能够满足吊装过程中的荷载要求。
3.吊装工艺设计吊装工艺设计是指确定吊装的具体步骤和顺序。
首先,需要考虑吊装设备的位置和布置。
吊装设备应放置在合适的位置,以便进行梁体的吊装和安装。
其次,确定吊装索的连接方式。
吊装索可以通过吊装吊环、吊装绳索或吊装链条等与梁体连接。
连接方式的选择应根据梁体的形状、重量和吊装设备的类型来确定。
最后,需考虑吊装过程中可能出现的风险和难点,并提出相应的解决方案。
例如,在吊装过程中,可能存在空间限制、风力影响或其他施工条件限制,需要采取相应的安全措施和施工技术,确保吊装过程的顺利进行。
有限元分析小论文有限元分析是一种基于数值计算的工程分析方法,用于研究结构在外载荷作用下的应力、变形、振动等特性。
该方法通过将结构分割成有限个小元素,对每个小元素进行单独分析,再将各个小元素的结果组合起来得到整个结构的响应。
本文将从有限元分析的原理、应用和优缺点等方面进行论述。
有限元分析的原理是以连续体的离散为基础,将结构分割成很多小单元,每个小单元的物理特性可以通过有限个参数进行描述。
然后,根据力的平衡关系和物体运动学等基本理论,可以得到每个小单元的受力和运动情况。
最后,将所有小单元的受力和运动结果组合起来,得到整个结构的响应。
有限元分析在工程领域有广泛的应用。
首先,它可以用于研究结构在静态或动态加载下的应力和应变分布情况。
例如,在计算机辅助设计中,可以通过有限元分析预测结构在不同载荷下的变形情况,帮助工程师优化结构设计。
其次,有限元分析还可以用于模拟材料的行为和响应。
例如,在材料科学领域,可以通过有限元分析研究材料的强度、疲劳寿命等特性。
此外,有限元分析还可以用于求解流体力学、热传导等问题。
然而,有限元分析也存在一些局限性。
首先,该方法需要将结构分割成有限个小单元,因此分割的大小和形状会对结果产生影响。
如果分割不合理,可能导致结果不准确。
其次,有限元分析需要对结构的物理特性进行建模和输入,这对分析人员的经验要求较高。
最后,有限元分析的计算量较大,在分析大型结构时可能需要较长的计算时间。
综上所述,有限元分析是一种重要的工程分析方法,能够帮助工程师研究结构的响应和行为。
虽然该方法存在一些局限性,但它仍然是解决工程问题的一种有效工具。
随着计算机技术的不断发展,有限元分析的精度和效率也将进一步提高。
4.2.5网格划分网格划分实际上就是结构离散化,即将结构离散为若干个具有有限个自由度的单元的集合体,并将分网前只具有结构几何特征的几何模型转变成结构的物理模型(有限元模型),物理模型就具有了与原结构相似的材料性能、力学特征等物理特性。
所谓的“相似”,是因为建立有限元模型时,总是要根据结构原型的力学特征采取一些假设条件进行简化处理。
所以,两者在一定精度范围内总是等效的或近似的,不可能完全一样。
在建立结构精细空间计算模型时,除满足上述原则外,尚有一个关键问题必须解决,即在进行单元的更详细划分时,如何把握一个合适的尺度。
因为不同精度的结构计算单元本身对单元的划分精细程度有不同的要求,目前学术界对这一问题还未给出定量的规定,仅给出了定性的原则:单元的划分不可过粗,这样不能保证足够的计算精度:一味的进行详细的单元划分也是不可取的,详细的单元划分将使计算单元数大幅增多,计算所需的计算机资源也将大大提高,当单元划分细到一定程度时,再进行细分单元对计算精度的提高效果已不很明显。
本文在对上述问题进行综合考虑后,通过扫略单元划分方法对其进行划分,网格划分完的有限元模型如图4—5所示,单元划分总数:27907个,其中solid65混凝士单元22739个,link8预应力钢筋单元5168个。
图4.5有限元模型网格划分4-3加载有限元分析的主要目的是考查结构或构件对一定荷载作用的响应。
因此,在分析中指定合适的荷载条件较为关键,在Ansys中,荷载包括边界条件和外部或内部作用力函数,荷载共分为六类:DOF约束、力、表面荷载、体积荷载,惯性荷载。
在结构分析中这六类荷载依次表示为:位移和边界条件、力和力矩、压力、质量、重力加速度或角速度角加速度。
本文所涉及到的荷载主要有边界条件、质量、重力加速度、压力。
本文将悬臂施工的待浇段混凝土的重量作为面压力(表面荷载)作用于前一阶段刚浇注完成并张拉了预应力柬的节段上,预应力是作为实常数中以初始应变的形式给出,鉴于在实际施工过程中,它是施工工艺的一个重要环节、是实现悬臂施工方法的决定性荷载,所以在此仍然作为荷载形式加以说明。
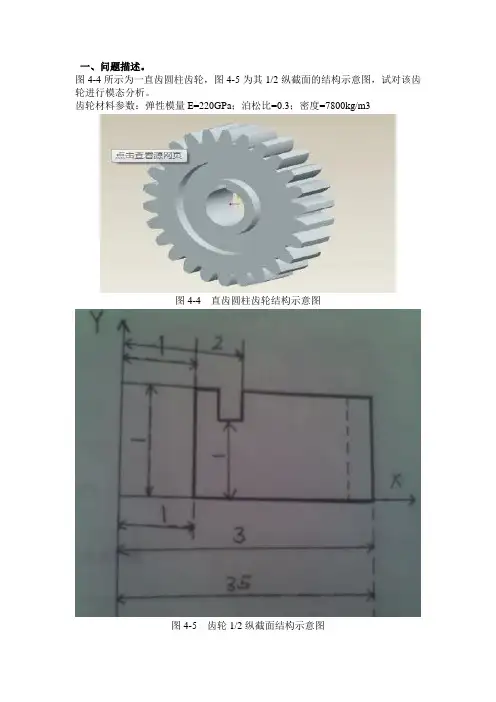
一、问题描述。
图4-4所示为一直齿圆柱齿轮,图4-5为其1/2纵截面的结构示意图,试对该齿轮进行模态分析。
齿轮材料参数:弹性模量E=220GPa;泊松比=0.3;密度=7800kg/m3图4-4 直齿圆柱齿轮结构示意图图4-5 齿轮1/2纵截面结构示意图二、单元类型的选择与设定(说明理由),材料属性指定。
该问题属于模态分析问题。
在分析过程中先建立其中一个轮齿的几何模型,再循环生成整体齿轮,选择SOLID90单元进行模态分析求解。
齿轮的模态分析需要创建三维实体模型,选择单元类型的时候一般选择实体模型Structural Solid来创建齿轮,单元类型选择对复杂形状具有较好的适应性的20节点的Brick 20node 95。
材料属性题目已指定:弹性模量E=220GPa,泊松比=0.3,密度=7800kg/m3。
1.定义工作文件名和工作标题。
1)选择Utility Menu︱File︱Change Jobname命令,出现Change Jobname对话框,在[/FILNAM]Enter new jobname输入栏中输入工作文件名EXERCISE1,单击OK按钮关闭该对话框。
2)选择Utility Menu︱File︱Change Title命令,出现Change Title对话框,在输入栏中输入MODAL ANALYSIS OF A GEAR,单击OK按钮关闭该对话框。
2.定义单元类型1)选择Main Menu︱Preprocessor︱Element Type︱Add/Edit/Delete命令,出现Element Types对话框,单击Add按钮,出现Library of Element Types对话框。
2)在Library of Element Types列表框中分别选择Structural Solid、Brick 20node 95,在Element type reference number输入栏中输入1,如图4-6所示,单击OK 按钮关闭该对话框。
基于有限元分析的核桃剥壳技术研究橙子为您提供一篇关于基于有限元分析的核桃剥壳技术研究的毕业论文开题报告,欢迎参考!1、课题的目的和意义1代写的毕业论文课题的目的和意义核桃又名胡桃、羌桃、合桃等,享有“长寿果”之美誉,是理想的滋补食品。
所含的脂肪蛋白质量多质优,还含有糖分、多种维生素、钙、磷、镁、钾、锰、路等矿物质,以及躁质、纤维素、戊聚糖等。
据分析:500克核桃肉的营养价值,相当于鸡蛋2500克,牛奶4750克或猪肉1500克,可见,核桃的营养值价是相当可观的。
随着核桃产量的逐年增加,如何对核桃进行深加工,以提高它的附加值等问题就突现出来。
核桃脱壳取仁是核桃深加工的第一步,必须首先解决。
核桃剥壳技术的水平,直接影响到核桃的脱壳质量,进而影响到核桃的进一步加工。
由于核桃形状不规则、尺寸差异较大、壳仁之间间隙小,壳完全破裂所要求的变形量大。
目前国内使用的机械破壳装备由于施力方式不合理,果仁的破碎率较大,脱壳率、整仁率及设备性价等方面满足不了要求。
核桃与其他坚果在结构上存在着很大的区别.而且目前国内外对核桃机械特性与破壳机理的研究相对较少(丁正耀等,2019)。
用一般的机械挤压方法破壳必将造成大量的碎仁,对于固定挤压间隙1 / 13的破壳装置来说,挤压间隙是固定的,不同尺寸的核桃都在同一开度内破壳,会出现小尺寸核桃难以破壳而大尺寸核桃仁的破碎率高的现象。
因此为了很好的破壳而又保证仁不破碎,就需要:① 挤压间隙与核桃尺寸相适应,有必要在破壳前对核桃进行分级;②合理施力使核桃产生裂纹且变形量小,这是提高核桃破壳机破壳质量的关键因素之一,因此有必要对核桃的施力方式及结果进行有限元受力分析;③裂纹的扩展是核桃完全破壳的基本条件,按核桃正确姿态喂人进行破壳是裂纹扩展的条件,有必要进行破壳前的导向(史建新等,2019)。
2、国内外发展现状2。
1核桃剥壳技术核桃的一次剥壳率和高露仁率是衡量剥壳取仁机性能的两个重要指标。
计算力学结课论文(普通高等教育)论文题目 ANSYS 有限元分析学 院专业名称班 级学 号姓 名指导教师 赵东 职 称ANSYS软件介绍ANSYS软件是融结构、流体、电场、磁场、声场分析于一体的大型通用有限元分析软件。
由世界上最大的有限元分析软件公司之一的美国ANSYS开发,它能与多数CAD软件接口,实现数据的共享和交换,如Pro/Engineer, NASTRAN, Alogor, I-DEAS, AutoCAD等,是现代产品设计中的高级CAE工具之一。
ANSYS有限元软件包是一个多用途的有限元法计算机设计程序,可以用来求解结构、流体、电力、电磁场及碰撞等问题。
因此它可应用于以下工业领域:航空航天、汽车工业、生物医学、桥梁、建筑、电子产品、重型机械、微机电系统、运动器械等。
软件主要包括三个部分:前处理模块,分析计算模块和后处理模块。
前处理模块提供了一个强大的实体建模及网格划分工具,用户可以方便地构造有限元模型;分析计算模块包括结构分析(可进行线性分析、非线性分析和高度非线性分析)、流体动力学分析、电磁场分析、声场分析、压电分析以及多物理场的耦合分析,可模拟多种物理介质的相互作用,具有灵敏度分析及优化分析能力;后处理模块可将计算结果以彩色等值线显示、梯度显示、矢量显示、粒子流迹显示、立体切片显示、透明及半透明显示(可看到结构内部)等图形方式显示出来,也可将计算结果以图表、曲线形式显示或输出。
软件提供了100种以上的单元类型,用来模拟工程中的各种结构和材料。
该软件有多种不同版本,可以运行在从个人机到大型机的多种计算机设备上,如PC,SGI,HP,SUN,DEC,IBM,CRAY等。
ANSYS软件提供的分析类型1.结构静力分析用来求解外载荷引起的位移、应力和力。
静力分析很适合求解惯性和阻尼对结构的影响并不显著的问题。
ANSYS程序中的静力分析不仅可以进行线性分析,而且也可以进行非线性分析,如塑性、蠕变、膨胀、大变形、大应变及接触分析。
带轮淬火过程的有限元分析摘要【为分析带轮淬火过程中的各场量变化情况,利用ANSYS的热分析功能对带轮进行瞬态热传递分析。
以采用实体单元离散带轮模型及设定时间历程变量的方法来研究锻造带轮在终锻后进行淬火的过程,分析其表面到中心各个部分的温度变化。
】关键词:淬火,数值模拟,有限元法,热分析Belt wheel quenching process based on finite element analysisABSTRACT【Analysis of quenching process for belt wheel in the field variation, The use of ANSYS thermal analysis function of belt wheel for transient heat transfer analysis. By using the solid element discrete belt wheel model and setting the time history variable approach to the study of forging belt wheel in the end after forging quenching process. Analysis of the surface to the center of the various parts of the temperature change.】KEY WORDS: Quench,Numerical simulation,The finite element method,Thermal analysis目录前言 (1)第1章问题描述 (3)1.1 设置带轮初始条件 (3)第2章问题的分析 (5)2.1 瞬态热分析 (5)2.2 分析模型的选择 (5)2.3求解的问题 (6)第3章带轮瞬态热分析的求解过程 (7)3.1 建立工作文件名和工作标题 (7)3.2 定义单元类型 (7)3.3 定义材料性能参数 (8)3.4创建几何模型、划分网络 (9)3.5加载求解 (20)3.6查看求解结果 (23)第四章命令流文件 (36)第五章实验结论 (42)谢辞 (43)参考文献 (44)附录 (46)外文资料翻译 (47)前言【有限元法是以电子计算机为手段的“电算”方法,它以大型问题为对象,未知的个数可以成千上万,因而为解决复杂的力学问题提供了一个有效的工具并被广泛应用于分析其他各种问题,尤其是热分析中的场问题,甚至成了该领域主要的分析方法。
有限元分析课程论文题目平面结构静力有限元分析姓名李涵学号1403180608学院机电工程学院班级________ 过控05班2016年12月20日摘要:本文比较典型地介绍了如何用有限元分析工具分析平面带孔平板收到平面静力时的应力分布状态我们遵循对平板结构进行有限元分析的方法,建立了一个完整的有限元分析过程。
首先是建立结构模型,然后进行网格划分,接着进行约束和加载,最后计算得出结论。
输出各种图形供参考。
通过本文,我们对有限元法在现代工程结构设计中的作用,使用方法有个初步的认识。
关键字:Ansys 静力分析有限元目录一、引言,,,,,,,,,,,,,,,,,,,,,,,, 4' 」I I—I 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 ~二、前处理,,,,,,,,,,,,,,,,,,,,,,, 5- *■、口J ,,,,,,,,,,,,,,,,,,,,,,,三、计算,,,,,,,,,,,,,,,,,,,,,,,, 9- 、卜I '丿['------ 555555555555555555555555 7四、后处理,,,,,,,,,,,,,,,,,,,,,,, 11I 1 / I—I ———L-^ ,,,,,,,,,,,,,,,,,,,,,,, 1 1五、命令流,,,,,,,,,,,,,,,,,,,,,,, 13六、总结,,,,,,,,,,,,,,,,,,,,,,,, 14 /、、)匕八口,,,,,,,,,,,,,,,,,,,,,,,,I一、引言有限元方法发展到今天。
已经成为一门相当复杂的实用工程技术。
有限元分析的最终目的是还原一个实际工程系统的数学行为特征。
即分析必须针对一个物理原型准确的数学模型。
模型包括所有节点、单元、材料属性、实常数、边界条件以及其他用来表现这个物理系统的特征。
ANSYS(analysis system)是一种融结构、热、流体、电磁和声学于一体的大型CANE通用有限元分析软件,可广泛应用于航空航天、机械、汽车交通、电子等一般工业及科学研究领域。
(镐京学院西安校区)
毕业设计
题目:机床动力卡盘的UG有限元分析
学生:黄金荣
学号: 2808121
院(系):机电工程学院
专业:机械设计制造及其自动化
指导教师:张斌
2012年6月11日
陕西科技大学
毕业设计(论文)任务书
机电工程学院机械设计制造及其自动化专业镐机械081班级学生:黄金荣
题目:机床动力卡盘的UG有限元分析
毕业设计(论文)从2012 年 2 月20 日起到2012 年 6 月14日
课题的意义及培养目标:
课题的目的在于学生在老师的指导下,初步尝试独立从事设计工作,综合运用所学的基础理论、专业知识、基本技能应对和处理问题,对四年所学知识和技能进行系统化、综合化运用、总结和深化。
运用UG的有限元分析模块对机床动力卡盘进行有限元分析,为机床动力卡盘的设计制造提供更好的理论依据。
课题的意义在于加深对机械专业相关课程理论的认识,学习UG有限元分析方面的基础知识,提高模型分析方面,特别是有限元分析的能力,培养独立完成设计能力。
设计(论文)所需收集的原始数据与资料:
1、、工程力学、零件手册等相关基础资料。
2、机械原理、机械设计、机械制造技术基础等专业理论资料。
3、关于机床动力卡盘约束及受力分析的相关资料。
4、UG6.0的相关资料等。
5、ansys12.0的相关资料等。
有限元分析毕业论文有限元分析毕业论文毕业论文是研究生阶段最重要的学术任务之一,对于工程类专业的学生来说,有限元分析是一个常见的研究方向。
有限元分析是一种数值计算方法,通过将复杂的物理问题离散为有限数量的小元素,再通过数学方法对这些小元素进行计算,从而得到整个系统的行为和响应。
在工程领域,有限元分析被广泛应用于结构力学、流体力学、热传导等领域。
首先,有限元分析毕业论文的引言部分应该简要介绍研究背景和目的。
例如,如果研究的是某种材料的力学性能,引言可以从介绍该材料的重要性和应用领域开始,然后阐述目前对该材料力学性能研究的现状和不足之处,最后明确本论文的研究目的和意义。
接下来,论文可以介绍有限元分析的基本原理和方法。
有限元分析的核心是将复杂问题离散为小元素,每个元素的行为可以用简单的数学模型描述。
这些元素组成了整个系统的有限元模型,通过求解这个模型得到系统的响应。
在介绍有限元分析的基本原理时,可以引用一些经典的理论和公式,例如虚功原理、有限元离散化方法等。
然后,论文可以详细介绍研究对象的建模和参数设置。
在有限元分析中,准确的模型和参数设置对于研究结果的可靠性和准确性至关重要。
研究对象可以是一个结构件、一个材料样品或者一个流体系统,根据具体情况选择合适的建模方法和参数设置。
例如,如果研究的是某种材料的力学性能,可以通过实验测试获得材料的力学参数,并将其作为有限元模型的输入。
接下来,论文可以介绍有限元分析的求解方法和计算过程。
有限元分析的求解过程可以分为预处理、求解和后处理三个步骤。
预处理阶段主要包括建立有限元模型、设置边界条件和加载条件等;求解阶段是通过数值计算方法求解有限元模型得到系统的响应;后处理阶段是对求解结果进行分析和解释。
在介绍求解方法和计算过程时,可以结合具体例子进行说明,以增加论文的可读性和实用性。
最后,论文可以通过对研究结果的分析和讨论来验证研究的有效性和可靠性。
分析和讨论可以从多个角度进行,例如对比实验结果、敏感性分析、参数优化等。
有限元分析论文写作范文(专业推荐6篇)车架作为汽车的承载基体,安装着发动机、传动系、转向系、悬架、驾驶室、货厢等有关部件和总成,承受着传递给它的各种力和力矩。
车架工作状态比较复杂,无法用简单的数学方法对其进行准确的分析计算,而采用有限元方法可以对车架的静动态特性进行较为准确的分析,从而使车架设计从经验设计进入到科学设计阶段。
以下是我们为你准备的6篇有限元分析论文,希望对你有帮助。
有限元分析论文范文第一篇:油罐运输车的有限元分析及优化摘要:为验证油罐运输车的结构强度是否满足使用要求,运用有限元仿真分析方法分别建立其弯曲、扭转、紧急制动3种工况的模型并进行了最大应力分析。
结果显示,罐体结构的应力小于材料的屈服应力,在满足使用要求的基础上,采用尺寸优化分析方法减薄罐体的厚度可实现轻量化。
关键词:油罐运输车;有限元分析;尺寸优化伴随着世界经济持续发展,石油、天然气的需求逐步增加,油罐车作为短途运输交通工具发挥着重要的作用。
存在部分结构不合理和整车质量过重现象及潜在运输的危险性,同时使得运输成本增加。
因此基于CAD/CAE技术对整车进行结构分析与轻量化设计,可以提高产品的科技含量,为企业以后的生产提供设计指导。
1罐车有限元模型的建立1.1单元类型的选择罐体单元主要采用单元类型中的壳单元来划分网格,车架部分由于用梁单元不能分析应力集中问题,所以同样采用壳单元来划分车架网格,这样可以准确地得出分析结果。
罐体的单元选用四边形壳单元(QUAD4),在几何形状复杂的位置可以采用少量的三角形单元(TRIA3)来过渡,以满足总体网格质量的要求,通常要求三角形单元占总单元数的比例不超过5%【2】.罐体以及车架的单元全部为10mm尺寸单元。
1.2罐体与车架连接方式罐体与前后封头、罐体与防波板以及加强板与相应连接部件之间用节点耦合的方式模拟焊接。
大梁与副车架之间的连接采用ACM单元。
ACM单元模拟的是一种特殊的焊接方法(AreaContactMethod),不同于刚性单元结点连接的方法。
有限元分析论文范文3篇立柱整机有限元分析论文论文摘要:基于连续体ICM拓扑优化方法,提出了以体积为约束条件,机床的固有频率为目标函数的结构动态设计方法。
为提高拓扑优化的精度,在结构优化过程中,同时也考虑了非设计区域的动态特性。
将该方法应用到XH6650高速加工中心的立柱结构优化中,从而提高了机床的整机动态特性。
论文关键词:拓扑优化;动态设计;动态特性本文针对XH6650高速卧式加工中心进行了整机的CAD/CAE建模和模态分析,根据分析结果确定该加工中心的立柱对整机的动态特性影响最大。
因此,选择加工中心的立柱为对象,基于ICM(independent—continuousmapping)拓扑优化方法,对其结构进行拓扑优化,以通过提高立柱的动态性能来达到提高整机动态性能的目的。
针对立柱结构,文中以结构的固有频率为目标函数,体积为约束的优化模型,在模型的建立过程中,也考虑到了安装在立柱上的主轴箱对其动态特性的影响,把主轴箱用相同的质量块来模拟代替,这样得到的立柱的优化结果,将使整个机床的动态性能得到更好的改善。
1XH6650高速卧式加工中心的CAD/CAE模型与模态分析该加工中心主要结构件由机床床身、立柱、主轴箱、工作台等组成,如图1所示。
整机主要采用8节点单元Solid185对各零、部件进行网格划分,导轨结合面采用测试获得的动刚度和阻尼进行界面连接,螺栓结合面采用梁单元相连接,根据实际边界条件,对该模型中的床身底部进行约束处理。
最终得到整机有限元模型共有21.2万Solid185单元,如图2所示。
为确定加工中心主要结构件对机床动态特性的影响,对整机进行了模态分析,图3~图6是整机前4阶振型和对应的固有频率。
由模态分析结果可以看出,第1阶模态主要是立柱的左右向摆动,整机的振动模态频率为86.45Hz。
立柱和主轴箱等部件作为一个刚体在底座与工作台组成的基础件上部作横向摆动,主振系统是立柱和主轴箱。
因此,该振动频率取决于立柱和主轴箱的y向刚度与质量。
有限元分析课程论文课程名称:有限元分析论文题目:ujoint有限元分析学生班级;学生姓名:任课教师:学位类别:评分标准及分值选题与参阅资料(分值)论文内容(分值)论文表述(分值)创新性(分值)评分论文评语:总评分评阅教师: 评阅时间年月日注:此表为每个学生的论文封面,请任课教师填写分项分值基于abaqus的ujoint有限元分析摘要:万向传动装置在汽车中起到了传递扭矩的关键作用,在abaqus中导入ujoint实体模型,之后对其进行坐标系建立,wire 建立,以及各部件之间的连接关系的建立,最后对该模型施加边界条件,令其运动。
关键词:abaqus、有限元、ujoint一问题的描述对导入的ujoint在所有步骤完成后,施加力:在stepinitial:均设为0;step SPIN:doundary1:限制除UR2的所有,且把UR2值设为:pi。
在boundary2 中,限制UR1和UR3自由度。
二在abaqus中导入ujoint实体模型启动abaqus CAE,在文件下拉菜单中选择:import ,选择最终文件位置or 输入ws_connector_ujoint.py.inp打开文件ujoint。
(如下图所示)2.1 创建坐标系单机操作界面中的tool,从下拉菜单中选择datum,再出来的窗口中选择coordinate,3points。
首先选择origin,在选择x正方向,Y正方向、z正方向。
创建完成。
2.2创建VERT和CROSS之间的2坐标系。
根据 2.1所述操作步骤创建坐标系V-C 和V-G (VERT和GROUND)。
Notice:1、创建过程中为了清晰分辨,可将IN的suppress,创建完成后再将其resume。
其他同样2、在V-C和I-C中,x轴与cross转动所绕轴平行。
根据2.1所属步骤创建I-C 和I-G. 结果如图;2.3 定义connector geometry1. 2.3.1 创建disjoint型wire在选项中选择interaction,在所出现窗口中点击Create Wire Feature tool.,在所出现的窗口中选择Disjointwires,单机添加要成wire的点。
机械1003班孙祥和 3100301144基于高速旋转齿轮的有限元分析引言:齿轮泵是工程中较为常见的一种泵,在高速运转时齿轮受到多种力的作用,包括齿面受到的压力,啮合时的接触应力以及自身离心力。
在此过程中,齿轮将发生形变,为此我们需要对其进行分析,确保其结构的稳定性,这对于齿轮泵安全有效地运行具有很重要的意义。
关键词:高速齿轮、平面静力分析、接触应力分析、离心力分析一、分析对象这里我们分析的对象是齿轮泵中高速运转的齿轮,在ANSYS中我们建立了标准齿轮模型,其各项数据如下表所示二、平面静力分析1、分析问题为了考查齿轮泵在高速运转时,齿轮发生多大的径向位移,从而判断其变形情况,以及齿轮运转过程齿面受到的压力作用。
在这里我们将齿轮的空间结构简化为平面模型,并分析其平面应力情况。
此处的静力分析为线性静力分析,求解步骤分为建模、施加载荷和边界条件并求解、结果分析和评价三个步骤,下面依序进行。
2、建立模型2.1 定义单元类型根据齿轮的平面几何对称性和此处分析类型,我们选择四节点矩形单元PLANE42。
PLANE42不仅可以用于计算平面应力问题,还可以用于分析平面应变和轴对称问题。
每个节点2个自由度:x,y方向。
具有塑性,徐变,膨胀,应力强化,大变形,大应变能力。
设定好单元类型后,对选择的PLANE42单元进行设置,在Element behavior (单元行为方式)选择Plane stress w/wk。
2.2 定义实常数本处选用带有厚度的平面应力行为方式的PLANE 42单元,需要设置器厚度实常数,只需在“Type1 PLANE 42”中将厚度设为4即可。
2.3 定义材料属性考虑惯性力的静力分析中必须定义材料的弹性模量和密度。
2.4 建立齿轮面模型,如下图所示图2 建立齿轮面模型2.5对盘面划分网格选择Main Menu:Preprocessor>Meshing>Meshing Tool(网格工具)命令,然后单击Line域选择所有线条(Pick All),之后用线控制单元网格划分,在No.of element division(划分单元的份数)中输入10,表示所有线条被划分为10份。
本处选用PLANE 42单元对盘面划分映射网格。
3、定义边界条件并求解建立有限元模型后,就需要定义分析类型和施加边界条件及载荷,然后求解。
此处齿轮的载荷为62.8 rad/s转速形成的离心力,位移边界条件将内孔边缘节点的周向位移固定,具体分为以下几个步骤。
3.1施加位移边界由于此处是对圆柱齿轮进行静态受力分析,为了获得较好的弯曲应力特性,限制各个面上的法相位移,且将内孔边缘节点的周向位移固定。
为各节点其施加周向位移,选择在节点上施加位移约束,并选择UY(Y方向位移),Y方向为周向(此处节点坐标系为柱坐标系,X方向为径向),即施加周向位移约束。
3.2施加转速惯性载荷及压力载荷并求解1)要施加齿轮高速旋转引起的惯性载荷,从主菜单中选择Solution>Define Load>Apply>Inertia>Angular Velocity>Global,然后施加角速度:打开Apply Angular Velocity(施加角速度)对话框,在Global Cartesian Z-comp(总体Z轴角速度分量)中输入62.8 rad/s(即齿轮转速),则由转速引起的惯性载荷施加完成;2)定义载荷时打开选择线的对话框中选择,选择两个相邻的齿边,打开Apply PRES on lines对话框,依据实际工作环境下所测出的受力数据,在Load PRES value文本框中输入5e6 N,施加齿轮啮合产生的压力。
定义位移约束并施加载荷后的结果如图3所示,然后选择Solution>Solve>Current LS进行求解。
图3 施加的位移约束和载荷4、查看结果4.1查看变形齿轮在高速运转时的关键变形为径向变形,径向变形过大,可能大致边缘与齿轮壳发生摩擦,在DOF solution(自由度解)选项中选择Translation X(X 向位移),X向位移即为径向位移。
结果如下图所示。
图4 径向变形图可以看出在边缘处的最大径向位移只有0.497 mm ,整体变形还是很小的,且沿径向方向上形变递减,说明当齿轮高速旋转时其边缘处变形较大易磨损。
4.2查看径向应力齿轮高速旋转时的主要应力也是径向应力,因此要查看该方向上的应力。
在Stress(应力)选项中选择X-direction SX(X方向应力)选项,结果如下。
可以看出在齿轮高速旋转时,齿顶处所受应力相对较小仅为0.41E7 Pa,而啮合处的应力相对较大,齿根处应力变形更大。
在实际工作环境中,由于多次重复的弯曲应力和应力集中,可能会造成轮齿的疲劳折断,故需要提高轮齿的抗断折能力,如:增大齿根过渡圆角半径、采用表面强化处理等。
三、离心力分析1、分析问题由于齿轮是轴对称结构,在ANSYS中可以利用结构的周期对称性,在建立模型和求解时,只对一个基本扇区建模和分析,这样可以降低分析的规模,节省计算费用。
此处我们单独分析一个轮齿,进而进行离心力分析。
2、建立模型2.1 定义单元类型此处选用八节点六面体单元SOLID 45,不需要设定实常数。
8个节点,每个节点3个自由度,x,y,z三个方向。
该单元有塑性,徐变,膨胀,应力强化,大变形和大应变能力。
(各向异性选用solid64。
solid45的高次形式使用solid95。
)2.2 定义材料属性2.3 建立齿轮的一个扇形模型3、定义边界条件并求解考虑到在实际过程中一对啮合齿轮的相互作用。
选择轮齿的齿顶面和齿面,在选择面上施加对称边界条件:Solution>Define Loads>Apply>Structural>Displacement>SymmetryB.C.>On Areas。
此处单独对高速齿轮受离心力作用下的应力及变形,因此为防止刚性位移,约束关键点47 (定义的轮齿边缘的一关键点)Z方向位移。
同时施加转速惯性载荷及压力载荷,在Solution>Define Loads>Apply>Inertia>Angular Velocity>Global施加角速度62.8 rad/s。
选择Sparse iterative求解器进行求解。
4、查看结果图6径向变形图由上图可以看出齿轮径向变形沿径向方向递减,这与对齿轮进行静力分析所得出的结论是一致的。
图7 径向应力分布图径向应力分布图显示出齿轮所受应力在内孔边缘处较为集中达到了0.86e11 Pa,在齿根处的应力也较大,但没有超出材料的受力极限。
四、接触应力分析1、分析问题一对啮合的齿轮在工作时产生接触,分析其接触的位置、面积和接触力的大小。
这里我们也对分析模型进行简化,分析平面应变。
2、建立模型2.1 定义单元类型选用四节点四边形板单元PLANE182,此单元不仅可用于计算平面应力问题,还可以用于分析平面应变和轴对称问题。
并且要对单元PLANE182进行设置,在Element behavior(单元行为方式)中选择Plane Stress(平面应力)选项。
2.2 定义实常数此处平面应力行为方式的PLANE182单元,需要设置其厚度实常数为4。
2.3 定义材料属性。
考虑惯性力的静力分析中必须定义材料的弹性模量和密度。
2.4 建立齿轮面模型2.5 对齿面划分网格此处选用PLANE182单元对齿面划分映射网格。
PLANE182单元由4个节点定义,每个节点2个自由度,x,y方向。
可用于平面单元也可用于轴对称单元。
具有塑性,超弹性,应力强化,大变形,大应变能力2.6定义接触对1)在应用菜单中选择Utility Menu:Select>Entities命令先选择线,选择一个齿轮上可能与另一个齿轮相接触的线(即一个轮齿上的两个齿面);2) 在实体选择对话框中选择Nodes,采用“Attached to”选择方式,在单选列表中选择Lines,all;3)从应用菜单中选择Utility Menu:Select>Comp/Assembly>Create Component 命令,在Component name文本框中输入“Node 1”定义一个接触节点;4)仿照步骤1),选择另一个齿轮上可能与前一个齿轮相接触的线;5)仿照步骤3),定义“Node 2”,这样节点集合就定义好了。
6)选中所有实体(Utility Menu:Select>Everything),单击工具条中的接触定义向导按钮,ANSYS会打开Contact Manger对话框,选择Contact Wizard,分别选择Node 1和Node 2,单击Create则接触对建立完成。
图8 啮合齿轮的接触对模型3.定义边界条件并求解建立有限元模型后,就需要定义分析类型和施加边界条件及载荷,然后求解。
此处的载荷为第一个齿轮的转角位移,位移边界条件是第一个齿轮内控边缘节点的径向位移固定,另一个齿轮内孔边缘节点的各个方向位移固定。
3.1施加位移边界此处的位移边界条件为将第一个齿轮内径边缘节点的径向位移固定,并将节点坐标系旋转到柱坐标系下施加周向位移。
选择第一个齿轮内径上的所有节点,在节点上施加UX(X方向)位移约束。
3.2 施加第一个齿轮位移载荷及第二个齿轮的位移边界条件并求解此处要施加第一个齿轮内径节点的位移载荷,选择第一个齿轮内径上的所有节点,施加周向位移约束,将Displacement value设定为-0.2。
然后选择第二个齿轮内径上的所有节点,在节点上施加各个方向位移约束(ALL DOF),将Displacement value设定为0。
在分析类型中将求解控制选项,选择Large Displacement Static,在Time at end of Loadstep文本框中输入1,在Number of substeps文本框中输入20,然后求解。
4、查看结果4.1查看von Mises等效应力如下图所示图9 齿轮啮合 von Mises等效应力图由上图可以看出一对接触齿轮啮合时应力集中在内孔边缘和轮齿齿根部分,但整体的受力很小。
4.2 查看接触应力如下图所示图10 啮合齿轮接触应力如图所示,齿轮啮合的接触应力分布呈对称状态,在接触面的应力较集中,但数值较小。
在实际工作环境中,当齿面材料硬度较低,载荷较重时齿轮传动啮合时齿面相对滑动速度方向在节点处发生改变。
在主动轮齿面的节线两侧,齿顶和齿根的摩擦力方向相背,在节线附近形成凹槽,在从动轮齿面节线附近形成凸脊,从而发生齿面塑性变形。
五、分析综合结果通过以上一系列的分析可以发现齿轮在工作状态下的形变程度较小,接触应力在其极限范围内,能够满足要求,符合工程安全性。