台达伺服驱动器接线
- 格式:pdf
- 大小:18.57 KB
- 文档页数:1
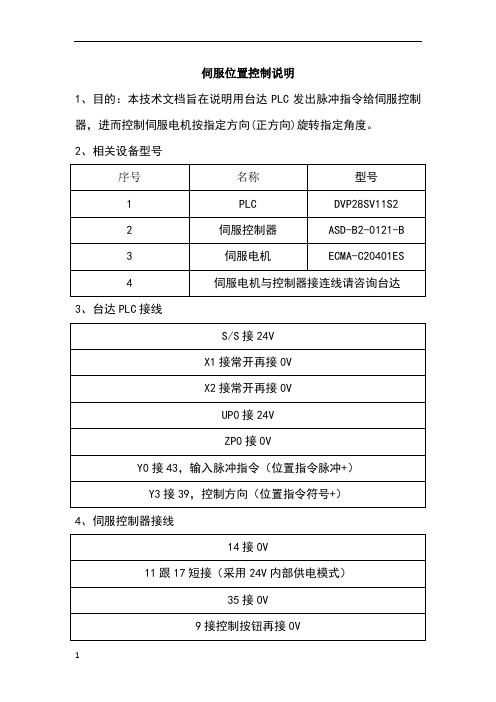
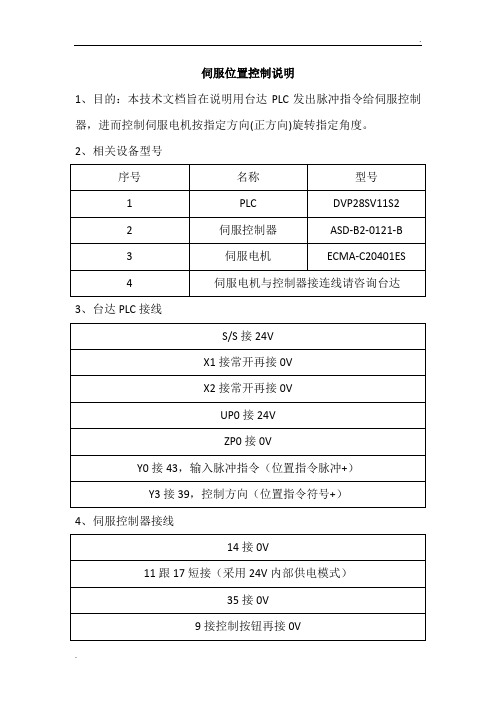
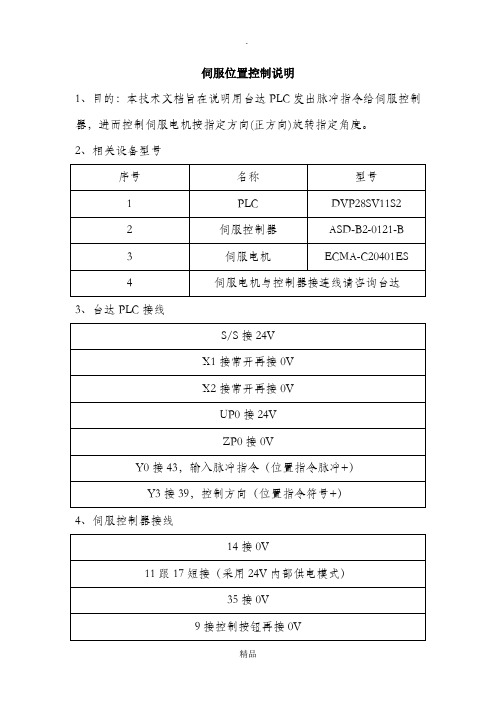
台达DVP28SV11PLC控制台达B2伺服接线及程序说明伺服位置控制说明1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度。
2、相关设备型号序号名称型号1 PLC DVP28SV11S22 伺服控制器ASD-B2-0121-B3 伺服电机ECMA-C20401ES4 伺服电机与控制器接连线请咨询台达3、台达PLC接线S/S接24VX1接常开再接0VX2接常开再接0VUP0接24VZP0接0VY0接43,输入脉冲指令(位置指令脉冲+)Y3接39,控制方向(位置指令符号+)4、伺服控制器接线14接0V11跟17短接(采用24V内部供电模式)35接0V9接控制按钮再接0V43接Y3(正脉冲指令输入)39接Y3(正方向指令输入)L1C接火线,L1C跟R短接L2C接火线,L2C跟S短接注:伺服电机与控制器采用专用配线连接5、PLC程序6、伺服控制器设置(位置模式)1.恢复出厂设置:P2-08 设置参数为10,P2-10 设置为101, p2-15设置为 0, p2-16 设置为0, p2-17设置为 0,重新上电。
(不按上述设置,只改p2-08,会报错)2.位置模式选择:P1-01 设置参数为00,重新上电。
设置P1-00为2,脉冲+方向模式。
3.设置DI1为Servo On:P2-10设置为101(默认初始值就是101)4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1-44和P1-45。
5.设置增益:P2-00,P2-02。
电机抖动,这个参数设置的要小些。
6.P0-02:设置为01 脉冲指令输入脉冲数(电子齿轮比之后)7、相关照片图1 伺服接线图2 PLC接线图3 整体接线。
伺服位置控制说明
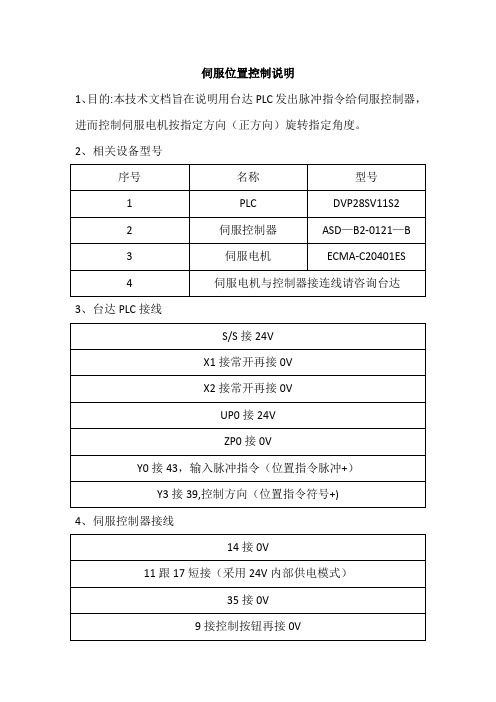
1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度。
2、相关设备型号
3、台达PLC接线
4、伺服控制器接线
43接Y3(正脉冲指令输入)
39接Y3(正方向指令输入)
L1C接火线,L1C跟R短接
L2C接火线,L2C跟S短接
注:伺服电机与控制器采用专用配线连接
5、PLC程序
6、伺服控制器设置(位置模式)
1.恢复出厂设置:P2-08 设置参数为10,P2-10 设置为101, p2-15设置为 0, p2-16 设置为0, p2-17设置为 0,重新上电。
(不按上述设置,只改p2-08,会报错)
2.位置模式选择:P1-01 设置参数为00,重新上电。
设置P1-00为2,脉冲+方向模式。
3.设置DI1为Servo On:P2-10设置为101(默认初始值就是101)
4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1-44和P1-45。
5.设置增益:P2-00,P2-02。
电机抖动,这个参数设置的要小些。
:设置为01 脉冲指令输入脉冲数(电子齿轮比之后)
7、相关照片
图1 伺服接线
图2 PLC接线
图3 整体接线。
伺服位置控制说明
1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度。
2、相关设备型号
3、台达PLC接线
4、伺服控制器接线
43接Y3(正脉冲指令输入)
39接Y3(正方向指令输入)
L1C接火线,L1C跟R短接
L2C接火线,L2C跟S短接
注:伺服电机与控制器采用专用配线连接
5、PLC程序
6、伺服控制器设置(位置模式)
1。
恢复出厂设置:P2-08 设置参数为10,P2—10 设置为101, p2—15设置为0, p2—16 设置为0, p2-17设置为 0,重新上电.(不按上述设置,只改p2—08,会报错)
2.位置模式选择:P1—01 设置参数为00,重新上电。
设置P1—00为2,脉冲+方向模式。
3.设置DI1为Servo On:P2—10设置为101(默认初始值就是101)
4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1—44和P1-4
5.
5。
设置增益:P2—00,P2—02。
电机抖动,这个参数设置的要小些。
6.P0—02:设置为01 脉冲指令输入脉冲数(电子齿轮比之后)
7、相关照片
图1 伺服接线
图2 PLC接线
图3 整体接线。
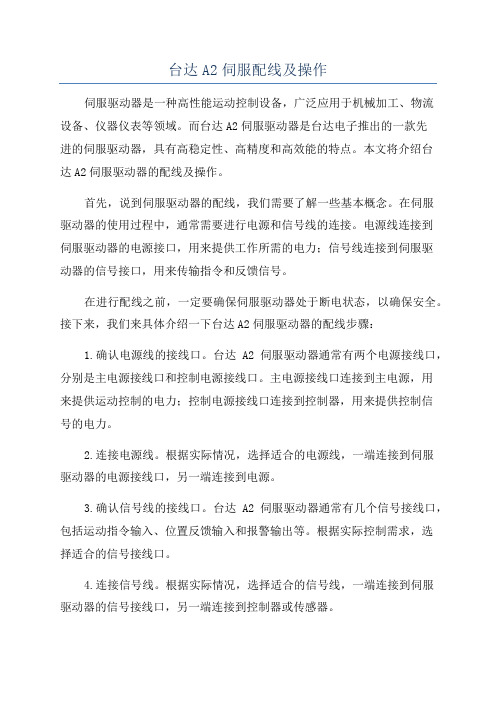
台达A2伺服配线及操作伺服驱动器是一种高性能运动控制设备,广泛应用于机械加工、物流设备、仪器仪表等领域。
而台达A2伺服驱动器是台达电子推出的一款先进的伺服驱动器,具有高稳定性、高精度和高效能的特点。
本文将介绍台达A2伺服驱动器的配线及操作。
首先,说到伺服驱动器的配线,我们需要了解一些基本概念。
在伺服驱动器的使用过程中,通常需要进行电源和信号线的连接。
电源线连接到伺服驱动器的电源接口,用来提供工作所需的电力;信号线连接到伺服驱动器的信号接口,用来传输指令和反馈信号。
在进行配线之前,一定要确保伺服驱动器处于断电状态,以确保安全。
接下来,我们来具体介绍一下台达A2伺服驱动器的配线步骤:1.确认电源线的接线口。
台达A2伺服驱动器通常有两个电源接线口,分别是主电源接线口和控制电源接线口。
主电源接线口连接到主电源,用来提供运动控制的电力;控制电源接线口连接到控制器,用来提供控制信号的电力。
2.连接电源线。
根据实际情况,选择适合的电源线,一端连接到伺服驱动器的电源接线口,另一端连接到电源。
3.确认信号线的接线口。
台达A2伺服驱动器通常有几个信号接线口,包括运动指令输入、位置反馈输入和报警输出等。
根据实际控制需求,选择适合的信号接线口。
4.连接信号线。
根据实际情况,选择适合的信号线,一端连接到伺服驱动器的信号接线口,另一端连接到控制器或传感器。
5.安装连接好的伺服驱动器。
将连接好的伺服驱动器安装到合适的位置,并固定好。
完成上述配线步骤后,我们可以进行台达A2伺服驱动器的操作。
伺服驱动器的操作可以通过控制器或人机界面进行。
下面是一些常见的操作步骤:1.通电前的检查。
在通电之前,需要检查伺服驱动器的电源线、信号线以及控制器的连接是否正确。
2.通电。
将主电源和控制电源分别接通,并确保伺服驱动器的指示灯亮起,表示电源正常。
3.参数设置。
通过控制器或人机界面,设置伺服驱动器的参数,包括运动控制参数、速度参数和位置参数等。

PLC接线图⼊门,详细掌握台达各系列伺服脉冲控制线路
伺服脉冲⼝的接法有很多种,但是万法不变其中,⽬的都是使我们伺服驱动器的光耦能够正确的开通、关断。
我们需要做的是,根据上位机提供的信号的类型、电位、⽅向,来确定适合的接线⽅法及匹配电阻,从⽽来实现光耦可靠的开通、关断。
1、NPN接线⽅式(24V输⼊型):适⽤A,A+,AB,A2伺服。
2、NPN接线⽅式(5V输⼊型):适⽤A,A+,AB,A2伺服。
3、PNP接线⽅式(24V输⼊型):适⽤A,A+,AB,A2伺服。
4、PNP接线⽅式(5V输⼊型):适⽤A,A+,AB,A2伺服。
5、差动接线⽅式:适⽤A,A+,AB,A2伺服。
6、NPN接线⽅式(24V输⼊型):适⽤B2伺服。
B2伺服脉冲输⼊接线(集极开路)
7、NPN接线⽅式(5V输⼊型):适⽤B2伺服。
8、PNP接线⽅式(24V输⼊型):适⽤B2伺服。
9、PNP接线⽅式(5V输⼊型):适⽤B2伺服。
10、差动接线⽅式:适⽤B2伺服。
注:上图唯有1为详细画法,其余均为省略画法,由此可参考1。
伺服位置控制说明
1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度。
2、相关设备型号
3、台达PLC接线
4、伺服控制器接线
43接Y3(正脉冲指令输入)
39接Y3(正方向指令输入)
L1C接火线,L1C跟R短接
L2C接火线,L2C跟S短接
注:伺服电机与控制器采用专用配线连接
5、PLC程序
6、伺服控制器设置(位置模式)
1.恢复出厂设置:P2-08 设置参数为10,P2-10 设置为101, p2-15设置为 0, p2-16 设置为0, p2-17设置为 0,重新上电。
(不按上述设置,只改p2-08,会报错)
2.位置模式选择:P1-01 设置参数为00,重新上电。
设置P1-00为2,脉冲+方向模式。
3.设置DI1为Servo On:P2-10设置为101(默认初始值就是101)
4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1-44和P1-45。
5.设置增益:P2-00,P2-02。
电机抖动,这个参数设置的要小些。
6.P0-02:设置为01 脉冲指令输入脉冲数(电子齿轮比之后)
7、相关照片
图1 伺服接线
图2 PLC接线
图3 整体接线。

伺服驱动器控制模式的接线及其注意事项伺服驱动器是一种用来控制伺服电机的设备,可以实现精确定位、速度控制和运动控制等功能。
在使用伺服驱动器时,正确的接线和注意事项非常重要,这样可以确保设备的安全性和稳定性。
下面将介绍伺服驱动器控制模式的接线以及注意事项。
一、伺服驱动器控制模式的接线1.电源接线:首先,应将伺服驱动器与适当的电源连接。
电源的选择应根据伺服驱动器的额定电压来确定,以避免过载和损坏设备。
接线时需要注意将正极和负极正确地连接到伺服驱动器上,以确保正常运行。
2.控制信号接线:伺服驱动器通常有多个控制信号接口,包括使能信号、方向信号和脉冲信号。
使能信号用于启用或禁用伺服驱动器,方向信号用于控制电机的转向,脉冲信号用于指示电机的运动位置。
这些信号应正确接线,以确保伺服驱动器正常工作。
3.反馈信号接线:伺服驱动器通常还有反馈信号接口,用于接收电机的转速和位置反馈信息。
这些信号可以是模拟信号或数字信号,接线时需要确保正确连接,以保证准确的位置控制。
4.通信接口接线:一些伺服驱动器还具有通信接口,用于与其他设备进行通信。
这些接口可以是串口接口、以太网接口或CAN接口。
接线时需要根据具体的通信协议和接口类型进行正确的连接,以确保通信的稳定和可靠。
二、注意事项1.接线前仔细阅读说明书:在进行伺服驱动器接线之前,应仔细阅读设备的说明书。
说明书中通常包含详细的接线图和接线步骤,按照说明书的要求进行接线可以避免错误和故障。
2.接线时断开电源:在进行伺服驱动器的接线时,务必断开电源,以避免电压冲击或其他危险。
3.注意接线的顺序:在进行伺服驱动器接线时,应注意按照正确的顺序进行接线。
通常,应先接地线,再接电源线,最后接控制信号线和反馈信号线。
4.使用合适的电缆和连接器:在进行伺服驱动器的接线时,应选择合适的电缆和连接器。
电缆应具有足够的电压和电流承载能力,连接器应可靠牢固,以确保接线的稳定性和可靠性。
5.避免干扰:在进行伺服驱动器的接线时,需要注意避免干扰。
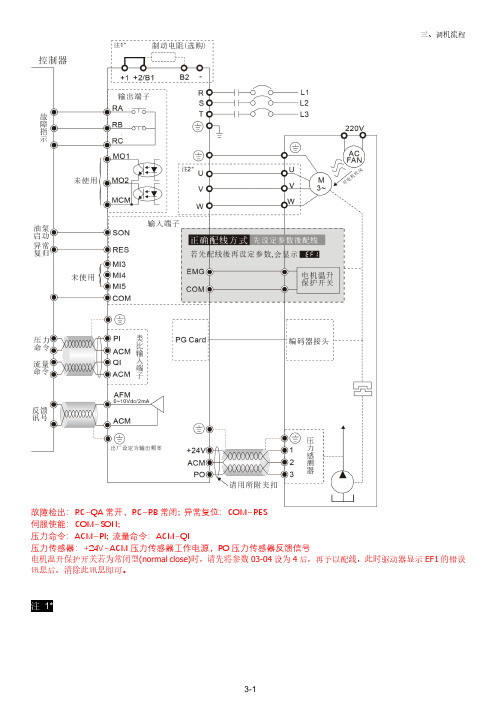
前言:笔者在做项目过程中,接触到台达B2系列伺服驱动器,将伺服的使用总结一下,控制部分为单片机,非PLC。
因为是第一次使用,个人能力有限,仅供参考,希望和大家一起交流,一起进步。
实验设备:台达伺服电机驱动器ASDA-B2-0721-B,伺服电机ECMA-C20802ES,单片机控制板。
实验目的:单片机电路板发出脉冲控制伺服电机驱动器(位置模式),使用伺服电机正反转,驱动器反馈脉冲给单片机控制电路,使其能精确控制机械位置。
ASDA-B2-0721-B驱动器位置模式(PT)特点:1、外部输入脉冲的频率确定转动速度的大小。
2、脉冲数来确定转动的角度。
实验内容:1、按ASDA-B2系列实用手册分别连接,控制回路电源L1c、L2c,主控制回路电源R、S,伺服电机输出U、V、W,地线,CN2电机编码器反馈接口。
注意:因为笔者使用的750W,主控制回路电源200~230VAC,驱动器上留有三相电接线,但个人感觉三相电线电压为380V,有可能损坏驱动器,所以建议直接两线,即220VAC 电源,笔者使用此方式,驱动正常。
2、按ASDA-B2系列实用手册调试电机JOG模式,确认驱动器和电机正常,具体参考手册,操作比较简单。
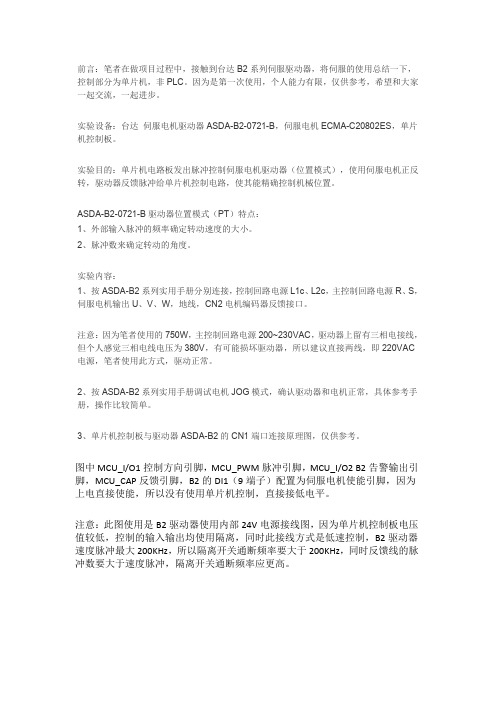
3、单片机控制板与驱动器ASDA-B2的CN1端口连接原理图,仅供参考。
图中MCU_I/O1控制方向引脚,MCU_PWM脉冲引脚,MCU_I/O2B2告警输出引脚,MCU_CAP反馈引脚,B2的DI1(9端子)配置为伺服电机使能引脚,因为上电直接使能,所以没有使用单片机控制,直接接低电平。
注意:此图使用是B2驱动器使用内部24V电源接线图,因为单片机控制板电压值较低,控制的输入输出均使用隔离,同时此接线方式是低速控制,B2驱动器速度脉冲最大200KHz,所以隔离开关通断频率要大于200KHz,同时反馈线的脉冲数要大于速度脉冲,隔离开关通断频率应更高。
图1控制板与伺服驱动器接线这里单单介绍的是I/O口的接线,具体电源接线,编码器,电机配线需要查阅相关的手册,这里不做过多介绍。
伺服位置控制说明
1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度。
2、相关设备型号
3、台达PLC接线
4、伺服控制器接线
43接Y3(正脉冲指令输入)
39接Y3(正方向指令输入)
L1C接火线,L1C跟R短接
L2C接火线,L2C跟S短接
注:伺服电机与控制器采用专用配线连接
5、PLC程序
6、伺服控制器设置(位置模式)
1.恢复出厂设置:P2-08 设置参数为10,P2-10 设置为101, p2-15设置为0, p2-16 设置为0, p2-17设置为0,重新上电。
(不按上述设置,只改p2-08,会报错)
2.位置模式选择:P1-01 设置参数为00,重新上电。
设置P1-00为2,脉冲+方向模式。
3.设置DI1为Servo On:P2-10设置为101(默认初始值就是101)
4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1-44和P1-45。
5.设置增益:P2-00,P2-02。
电机抖动,这个参数设置的要小些。
6.P0-02:设置为01 脉冲指令输入脉冲数(电子齿轮比之后)
7、相关照片
图1 伺服接线
图2 PLC接线
图3 整体接线如有侵权请联系告知删除,感谢你们的配合!。
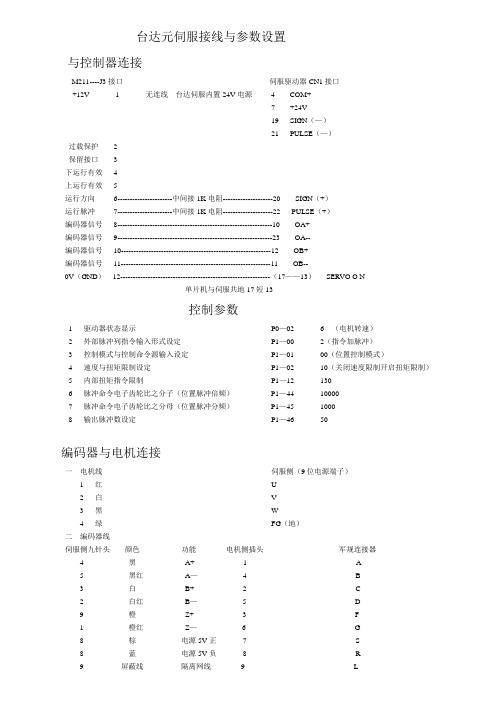
台达元伺服接线与参数设置与控制器连接M211----J3接口伺服驱动器CN1接口+12V 1 无连线台达伺服内置24V电源 4 COM+7 +24V19 SIGN(—)21 PULSE(—)过载保护 2保留接口 3下运行有效 4上运行有效 5运行方向6----------------------中间接1K电阻--------------------20 SIGN(+)运行脉冲7----------------------中间接1K电阻--------------------22 PULSE(+)编码器信号8--------------------------------------------------------------10 OA+编码器信号9--------------------------------------------------------------23 OA--编码器信号10------------------------------------------------------------12 OB+编码器信号11------------------------------------------------------------11 OB--0V(GND)12------------------------------------------------------------(17——13)SERVO O N单片机与伺服共地17短13控制参数1 驱动器状态显示P0—02 6 (电机转速)2 外部脉冲列指令输入形式设定P1—00 2(指令加脉冲)3 控制模式与控制命令源输入设定P1—01 00(位置控制模式)4 速度与扭矩限制设定P1—02 10(关闭速度限制开启扭矩限制)5 内部扭矩指令限制P1—12 1306 脉冲命令电子齿轮比之分子(位置脉冲倍频)P1—44 100007 脉冲命令电子齿轮比之分母(位置脉冲分频)P1—45 10008 输出脉冲数设定P1—46 50编码器与电机连接一电机线伺服侧(9位电源端子)1 红U2 白V3 黑W4 绿FG(地)二编码器线伺服侧九针头颜色功能电机侧插头军规连接器4 黑A+ 1 A5 黑红A— 4 B3 白B+ 2 C2 白红B— 5 D9 橙Z+ 3 F1 橙红Z— 6 G8 棕电源5V正7 S8 蓝电源5V负8 R9 屏蔽线隔离网线9 L。