线性系统理论第二章 系统状态空间模型
- 格式:ppt
- 大小:1.45 MB
- 文档页数:66
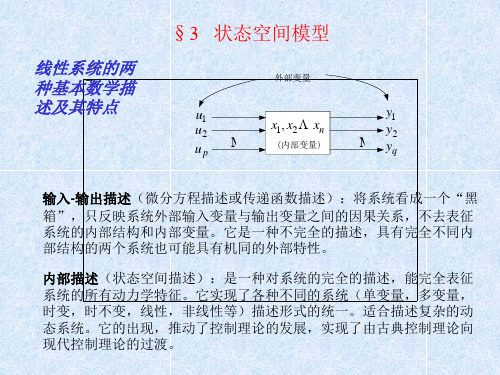
状态空间模型状态空间模型是一种用于描述动态系统行为的数学模型。
在状态空间模型中,系统的行为由状态方程和观测方程确定。
状态方程描述系统状态如何随时间演变,而观测方程则描述系统状态如何被观测。
通过利用状态空间模型,我们可以对系统进行建模、预测和控制。
状态空间模型的基本概念状态空间模型通常由以下几个要素构成:1.状态变量(State Variables):描述系统状态的变量,通常用向量表示。
状态变量是系统内部的表示,不可直接观测。
2.观测变量(Observation Variables):直接观测到的系统状态的变量,通常用向量表示。
3.状态方程(State Equation):描述状态变量如何随时间演变的数学方程。
通常表示为状态向量的一阶微分方程。
4.观测方程(Observation Equation):描述观测变量与状态变量之间的关系的数学方程。
状态空间模型的应用状态空间模型在许多领域都有着广泛的应用,包括控制系统、信号处理、经济学和生态学等。
其中,最常见的应用之一是在控制系统中使用状态空间模型进行系统建模和控制设计。
在控制系统中,状态空间模型可以用于描述系统的动态行为,并设计控制器来实现系统性能的优化。
通过对状态方程和观测方程进行数学分析,可以确定系统的稳定性、可控性和可观测性,并设计出满足特定要求的控制器。
状态空间模型的特点状态空间模型具有以下几个特点:1.灵活性:可以灵活地描述各种复杂系统的动态行为,适用于各种不同的应用领域。
2.结构化:将系统分解为状态方程和观测方程的结构使得系统的分析更加清晰和系统化。
3.预测性:通过状态空间模型,可以进行系统状态的预测和仿真,帮助决策者做出正确的决策。
4.优化性:可以通过状态空间模型设计出有效的控制器,优化系统的性能指标。
在实际应用中,状态空间模型可以通过参数估计和参数辨识等方法进行模型的训练和调整,以适应实际系统的特性。
结语状态空间模型是一种强大的数学工具,可以帮助我们理解和分析动态系统的行为。

![线性系统理论(第2章)2[1].1](https://img.taocdn.com/s1/m/21fd85f8700abb68a882fb01.png)

§3.3 Matlab 实验
1. 状态空间模型脉冲响应、阶跃响应和任意输入响
应
(1) [y,x,t]=impulse(a,b,c,d)
(2) [y,x,t]=step(a,b,c,d),其中y、x 和t 是输出、
状态向量和仿真时间。
(3) [y,x]=lsim(a,b,c,d,u,t,x0)。
例求管亠[0* x c£,为
u(t) =sint的状态输出值。
解程序和结果如下
-0.2
-0.4
2. 离散系统的脉冲响应、阶跃响应、任意输入响应
⑴[y, x]=dimpulse(sys);
(2) [y, x] = dstep( nu m,de n);
(3) [y, x]=dlsim(sys,u); 47y、x 和u 分别为输出、
状态和输入,sys可以是num,den或a,b,c,d,不绘图,当无y, x时直接绘图。
3 •连续和离散状态模型的零输入响应(只对初态x0 响应)
(1) [y,x,t]=i nitial(a,b,c,d,xO)
⑵[y,x,t]=dinitial(a,b,c,d,x0) ,y 为输出,x 为状态,
t为指定输出时间。
当不带y、x和t时,直接绘图。
4 •连续系统离散化
(1) [da,db,dc,dd]=c2dm(a,b,c,d,Ts)
⑵[dnum,dden]=c2d(num,den,Ts) , Ts 是采样周期。
5.矩阵指数
expm(a*t),其中t可为符号变量,也可为实值。
0 1
例如设A = 0',则求e At的命令和结果如下:
||-4 -4。




线性系统理论Linear System Theory 1-1 状态空间的基本概念例1-1 图示RLC 网络。
设:u i 为输入变量;u o =u c 为输出变量。
2 状态空间描述中常用的基本概念例1-1 图示RLC 网络。
设:u i 为输入变量;u o =u c 为输出变量。
用矩阵表示状态空间表达式:⎪⎨+−−=u x R x x 11&1-2 线性连续系统状态空间表达式的建立1......)((b s b s b s b s Y G n n ++++−1 N(s)/D(s)的串联分解——可控标准型实现x&x x⎤⎡⎡00010L &状态变量图例1-5 已知系统微分方程:u u T y y y +=ω+ωζ+试求系统的状态空间表达式,并绘制该系统的状态变量图。
21u x x x+ζω−ω−=22&2 可观测标准型实现设可控标准型实现为例1-6 已知系统微分方程:试求可观测标准型实现,并绘制其状态变量图。
3 并联分解——Jordan标准型实现⎤⎡−s L 0001ss s s U s G 89)()(23++==例1-7 已知某系统传递函数:⎡1⎤4 矩阵的特征方程、特征值1)方阵2 线性定常连续系统状态方程的求解2-1 齐次状态方程的解⎢⎣⎥⎦⎢⎣−−=⎥⎦⎢⎣22x 32x &解:用拉氏变换的方法:例2-1 求已知状态方程的状态转移矩阵。
2-2 状态转移矩阵的性质例2-2 已知状态转移矩阵,求Φ-1和系统矩阵A。
性质9 若例2-3已知系统矩阵,求状态转移矩阵及其状态转移矩阵的逆。
非齐次状态方程:例2-4 已知状态空间描述及零初始条件,输入为单位阶跃,求状态方程的解SISO系统:例9-29 已知系统动态方程,试求系统的传递矩阵。
⎡x&9-4-2开环与闭环传递矩阵MIMOU(s)E(s)Y(s)由图可知:3-1 线性系统的可控性与可观性3-1-1 问题的提出例3-2 已知系统状态空间表达式,⎧3-2 可控性问题基本概念考虑线性系统:3-3 可观测性的基本概念3-4 线性定常系统可控性判据考虑线性定常系统:例3-3 判断已知系统的可控性。


第二章 线性系统的状态空间分析法c§1 线性系统的状态空间描述§2 线性定常连续系统的分析e a第二章 线性系统的状态空间分析法§3 线性定常离散系统的分析 §4 系统的传递函数矩阵ty cc§1 线性系统的状态空间描述§2 线性定常连续系统的分析e a§3 线性定常离散系统的分析 §4 系统的传递函数矩阵ty c叠加 原理一、系统描述的基本概念 一、系统描述的基本概念1,输入、输出2,松弛性:若系统的输出y[t0,∞) 由输入u[t0,∞)唯一确定,则称系统在t0时刻是松弛的。
系统在t0 时刻不存储能量,初始条件为零!ce a4,线性: H (u1 + u 2 ) = Hu1 + Hu2 可加性5,定常性: Qa 为位移算子y = Hu算子,如传递函数3,因果性:系统在t 时刻的输出仅取决于t时刻和t 时刻之前的输入,与t 时刻之后的输入无关。
ty cy1 y2 yq输入延迟输出相应延迟 y = Hu = HQa u = Qa Hu = Qa y = y (t − a )u (t ) y (t ) u (t ) y (t )cH (αu1 ) = αH (u1 )e at齐次性a为实数u (t ) = Qa u (t ) = u (t − a )ty ct系统 数学描述cu1 u2 up外部描述(输入—输出描述)不完全描述微分方程、传递函数e aM二、状态空间的基本概念 二、状态空间的基本概念Mx 例:机械位移系统 依据牛顿定律: ∑ F = m&&(t )系 统x1 , x2 , L , xn内部描述(状态空间描述)状态方程+输出方程ty c完全描述ckmF (t )e ax (t )& ∴ F (t ) − kx(t ) − fx(t ) = m&&(t ) x微分方程:& m&&(t ) + fx(t ) + kx(t ) = F (t ) xf传递函数:X (s ) 1 = (s ) ms 2 + fs + k F经典控制理论中的数学模型(外部描述),反映 了输入输出的关系,不能反映内部变量的关系。